
Smart City Application: Real-Time Pedestrian Detection Using YOLO11
Architecture
Mark Xavier Dsouza
a
, Adavayya Charantimath
b
, C. Hithin Kumar
c
, Tejas R R Shet
d
and Shashank Hegde
School of Computer Science and Engineering, KLE Technological University, Hubballi, India
Keywords:
Pedestrian Detection, Vehicle Detection, YOLO11, Urban Traffic Monitoring, Deep Learning, Edge Devices.
Abstract:
The integration of real-time pedestrian and vehicle detection systems is vital for smart city applications,
addressing challenges like traffic management and pedestrian safety. This paper proposes a scalable and
resource-efficient framework based on YOLO11. The model leverages features like CSP-Darknet, Spatial
Pyramid Pooling (SPP), and Soft Non-Maximum Suppression (Soft-NMS) to ensure accuracy and low la-
tency. Achieving a mean Average Precision (mAP) of 88.0%, the system excels in urban scenarios, including
crowded and low-light conditions. This research bridges theoretical advancements and real-world deployment,
aiming for smarter, safer cities.
1 INTRODUCTION
The rapid growth of urbanization and vehicular traf-
fic calls for real-time pedestrian detection systems in
smart city infrastructure (Zhang et al., 2020). The
systems have been crucial for improving pedestrian
safety, controlling congestion, and ensuring right-
of-way compliance (Redmon et al., 2016). Real-
time and accurate pedestrian detection is vital for ap-
plications such as autonomous vehicles, intelligent
traffic systems, and urban surveillance, where ev-
ery millisecond counts (Zhang et al., 2020). Real-
time pedestrian detection bridges the gap between
cutting-edge research and practical implementation
by addressing challenges such as occlusions, dynamic
lighting, and overlapping objects, making it indis-
pensable for creating safer urban environments (Jiang
et al., 2019).
Advancements in Artificial Intelligence (AI), par-
ticularly Deep Learning, have revolutionized com-
puter vision tasks like object detection (Liu et al.,
2016). Early methods, such as Haar cascades and
Support Vector Machines, relied on handcrafted fea-
tures but struggled in real-world urban scenarios due
to occlusions, dynamic lighting, and scale variations
a
https://orcid.org/0009-0003-1155-7621
b
https://orcid.org/0009-0001-9740-8904
c
https://orcid.org/0009-0007-1745-3670
d
https://orcid.org/0009-0004-9353-5676
(Bochkovskiy et al., 2020). Convolutional Neural
Networks (CNNs) marked a breakthrough by en-
abling data-driven feature extraction (He et al., 2016).
Region-based methods such as Faster R-CNN im-
proved localization accuracy but were computation-
ally expensive, leading to single-shot detectors like
YOLO, which can process an entire image in a sin-
gle forward pass (Ren et al., 2015). The evolution of
YOLO from YOLOv1 to YOLOv8 has brought fea-
tures such as anchor boxes, multi-scale detection, and
advanced architectures to balance speed and accuracy
for real-time applications (Redmon et al., 2016).
The newest iteration, YOLO11, utilizes the best
of techniques such as CSPDarknet, Spatial Pyramid
Pooling (SPP), and Soft Non-Maximum Suppression
(Soft-NMS) and does well in crowded urban scenar-
ios with challenges such as occlusions and chang-
ing lighting conditions (Jiang et al., 2019). The re-
search will make use of YOLO11 to propose a scal-
able, automated real-time pedestrian detection system
for use in urban environments (Wang et al., ). Its
high accuracy and low latency make it suitable for
traffic management, pedestrian safety enforcement,
and urban planning, even on resource-constrained de-
vices (Brown and Green, 2022). The integration of
YOLO11 into smart city frameworks highlights its
potential to enhance pedestrian safety, reduce traffic-
related incidents, and facilitate efficient urban man-
agement, aligning with the overarching goals of cre-
ating smarter, safer, and more sustainable cities(Jiang
Dsouza, M. X., Charantimath, A., Kumar, C. H., R R Shet, T. and Hegde, S.
Smart City Application: Real-Time Pedestrian Detection Using YOLO11 Architecture.
DOI: 10.5220/0013611000004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 3, pages 167-172
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
167

et al., 2019).
This paper provides an overview of our research
journey. Section 2 reviews related work on pedes-
trian and vehicle detection, highlighting urban chal-
lenges. Section 3 presents our approach, explain-
ing the YOLO11 architecture and real-time detection
methodology. Section 4 discusses experimental re-
sults, including key metrics like mAP, precision, and
recall. Finally, Section 5 summarizes our findings and
suggests future research, including low-light detec-
tion improvements and predictive analytics for traffic
management.
2 LITERATURE REVIEW
The detection of pedestrians and vehicles has be-
come a critical area of research in urban traffic man-
agement, safety systems, and smart city frameworks.
Early approaches to object detection were primar-
ily based on manually crafted features and machine
learning models. Techniques such as the Viola-Jones
cascade classifier (Viola and Jones, 2001) and His-
tograms Of Oriented Gradients (HOG) (Dalal and
Triggs, 2005) formed the foundation for identify-
ing objects in constrained settings. While effective
in controlled environments, these methods struggled
with challenges inherent to urban landscapes, includ-
ing occlusions, fluctuating lighting, and the diverse
appearance of pedestrians and vehicles.
With the emergence of deep learning, the field
of object detection witnessed a revolutionary shift.
Convolutional Neural Networks (CNNs) automated
feature extraction and greatly enhanced the robust-
ness and accuracy of detection models. Region-based
CNNs, such as Faster R-CNN (Ren et al., 2015),
combined region proposal mechanisms with CNNs to
achieve highly accurate detections. However, these
models relied on computationally expensive multi-
stage pipelines, making them unsuitable for real-time
applications like live traffic monitoring and pedestrian
detection (Girshick, 2015).
To address the limitations of traditional region-
based models, single-shot detection frameworks, in-
cluding the Single Shot MultiBox Detector (SSD)
(Liu et al., 2016) and the early iterations of unified
detection systems like You Only Look Once (YOLO)
(Redmon et al., 2016), reframed object detection as a
single regression problem. The streamlined approach
processed the entire image in a single pass, achiev-
ing real-time performance while maintaining compet-
itive accuracy. Over successive iterations, advance-
ments such as anchor boxes, multi-scale detection,
and improved backbone networks allowed these sys-
tems to handle challenges like small-object detection
and scale variation more effectively (Bochkovskiy
et al., 2020).
The latest evolution in this family of models, in-
troduced as version 11, incorporates key innovations
including Cross-Stage Partial Networks (CSP), Spa-
tial Pyramid Pooling (SPP), and Soft Non-Maximum
Suppression (Soft-NMS). These enhancements sig-
nificantly improve detection capabilities, particularly
in dense and cluttered urban settings. By addressing
challenges such as occlusions, overlapping objects,
and fluctuating lighting conditions, this architecture
achieves an optimal balance of speed and accuracy.
Its ability to process live video feeds in real time po-
sitions it as a pivotal tool for smart city applications,
enhancing pedestrian safety, traffic management, and
urban planning (Liang et al., 2023).
This seamless progression from handcrafted
methods to advanced detection architectures high-
lights the transformative impact of deep learning in
pedestrian and vehicle detection. While recent ad-
vancements have mitigated many challenges, the in-
tegration of these systems into scalable and resource-
efficient frameworks remains a focus for future re-
search, aligning with the overarching goals of build-
ing smarter and safer urban environments.
3 PROPOSED WORK
Building on these advancements, this proposed work
proposes a real-time pedestrian and vehicle detec-
tion system optimized for deployment in urban en-
vironments. The model, based on YOLO11, ad-
dresses challenges such as occlusion, small-object de-
tection, and varying lighting conditions. Designed for
edge devices, the system ensures efficient operation
on resource-constrained hardware while maintaining
high accuracy (Li et al., 2024).
3.1 Architecture
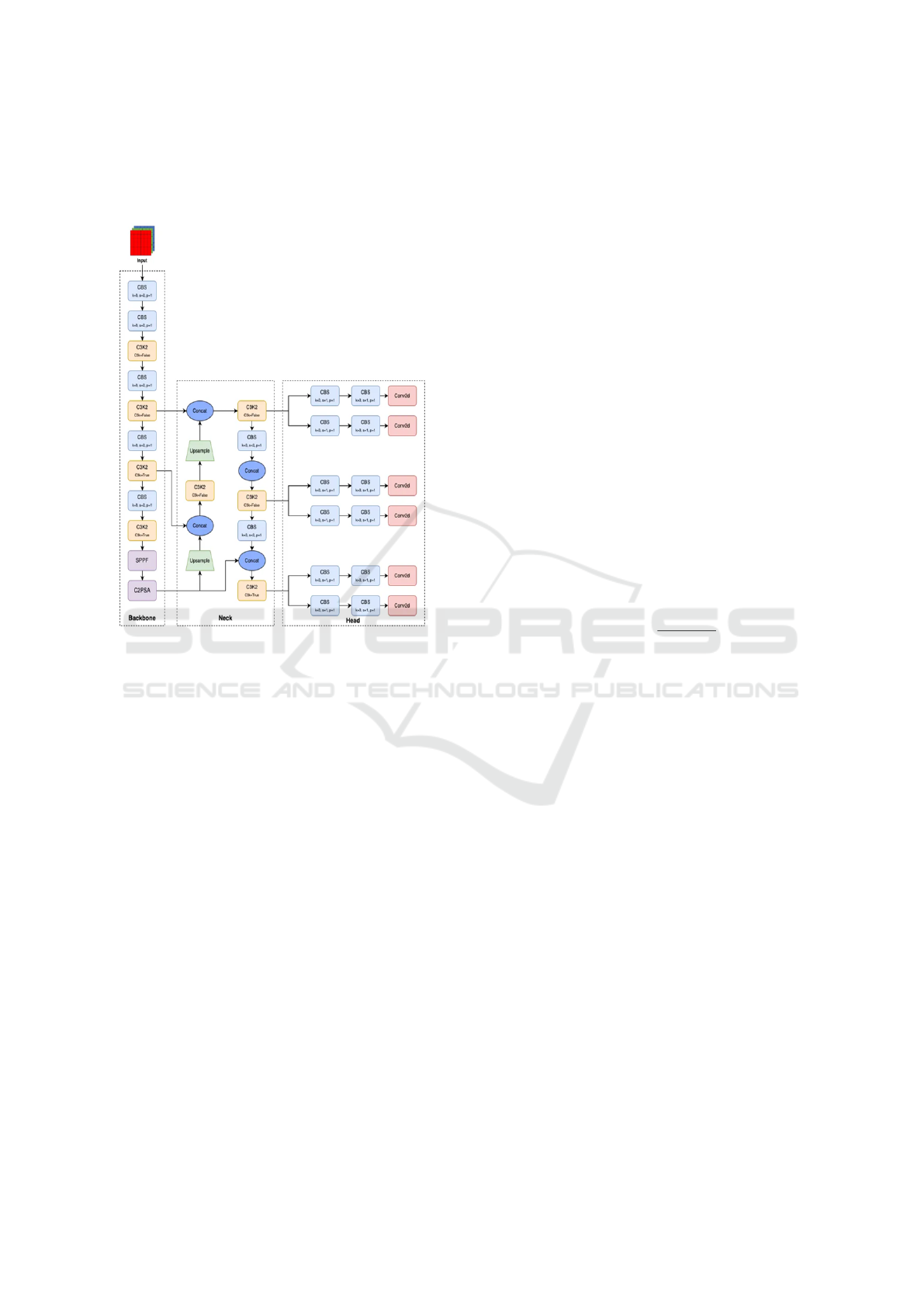
The architecture of YOLO11 (Figure.1) is divided
into three key components: Backbone, Neck, and
Head, each designed to enhance the efficiency and ac-
curacy of pedestrian detection (Zheng et al., 2024).
The Backbone is responsible for feature extraction
from the input image, starting with an input size of
640 × 640 × 3. It uses successive convolutional layers
and C3K2 blocks with shortcut connections to capture
both local and global contextual information while
reducing the spatial dimensions of the feature maps.
These residual modules improve feature propagation
INCOFT 2025 - International Conference on Futuristic Technology
168
and prevent gradient vanishing in deep networks, pro-
gressively distilling the input into high-level features
critical for pedestrian detection (Gao and Wu, 2024).
Figure 1: Architecture of YOLO11.(Jegham et al., 2024)
The Neck and Head form the remaining compo-
nents of the architecture. The Neck serves as a fea-
ture aggregation stage, using Upsample and Concat
layers to fuse multi-scale features and enhance the
model’s ability to detect objects of different sizes.
Advanced modules such as SPFF (Spatial Pyramid
Fast Fusion) and C2PSA (C2 Spatial Attention) are
integrated into the Neck, improving the receptive field
and refining feature localization through spatial atten-
tion (Wang et al., 2023). Finally, the Head is respon-
sible for predicting bounding boxes, class probabil-
ities, and confidence scores. Leveraging multi-scale
detection layers, the Head ensures accurate predic-
tions for pedestrians of varying sizes and positions,
making YOLO11 highly suitable for real-time detec-
tion tasks in complex environments (Li et al., 2024).
3.1.1 Loss Function
The YOLO11 architecture processes images via a
CSPDarknet backbone to extract features from any
object at any scale robustly. The detection head
performs bounding box prediction, class probability
prediction, and objectness score prediction together
while optimizing for real-time detection. The loss
function (Equation 1) involves three key components:
classification loss (L
cls
), objectness loss (L
ob j
), and
localization loss (L
loc
), and their combination is as
follows:
L = λ
cls
· L
cls
+ λ
ob j
· L
ob j
+ λ
loc
· L
loc
(1)
Classification loss (Equation 2), calculated using
softmax cross-entropy, is defined as:
L
cls
= −
C
∑
i=1
p
i
log( ˆp
i
) (2)
where C is the number of classes, p
i
is the true
probability for class i, and ˆp
i
is the predicted proba-
bility. The objectness loss (Equation 3), which mea-
sures the confidence with which an object exists in the
bounding box, is modeled by the binary cross-entropy
function as follows:
L
ob j
= −[y log( ˆy) + (1 − y)log(1 − ˆy)] (3)
where y is the ground truth objectness score and ˆy
is the predicted score.
The localization loss, computed using Complete
IoU (CIoU) (Equation 4), measures the alignment of
predicted bounding boxes with ground truth and takes
into account distance, overlap, and aspect ratio differ-
ences:
CIoU = 1 − IoU +
ρ
2
(b, b
gt
)
c
2
+ αv (4)
where ρ
2
(b, b
gt
) is the Euclidean distance between
the centers of the predicted and ground truth boxes, c
2
is the diagonal length of the smallest enclosing box,
and v is an aspect ratio term. This all-inclusive loss
function ensures that the model effectively balances
classification accuracy, bounding box confidence, and
localization precision, which in turn helps it perform
well in different urban traffic scenarios.
3.2 Implementation
The proposed work utilizes a customized dataset
specifically created for the Hubli-Dharwad Smart
City, consisting of 1,000 images annotated with
bounding boxes in a YOLO11-compatible format. It
focuses on two object classes: pedestrians and vehi-
cles, which are commonly encountered in urban traf-
fic scenarios. To standardize input for the YOLO11
models, all images were resized to a resolution of
640 × 640. Preprocessing techniques, such as data
augmentation and normalization, were applied to en-
hance the dataset’s robustness and variability. The
data set was divided into 70% for training and 30% for
testing, ensuring that the model could learn data pat-
terns effectively during training and be robustly eval-
uated on unseen samples. Annotations were provided
Smart City Application: Real-Time Pedestrian Detection Using YOLO11 Architecture
169
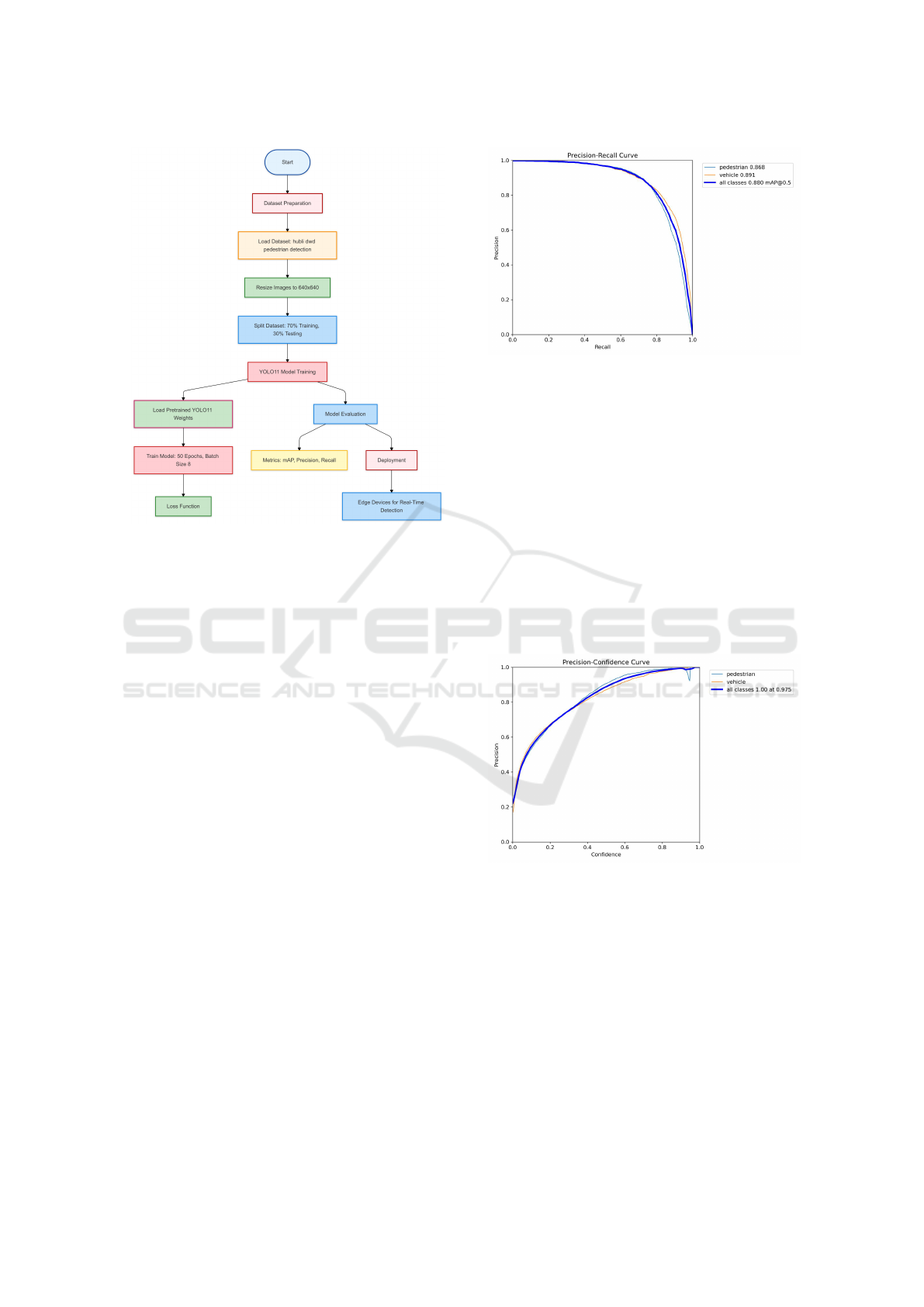
Figure 2: Flowchart of Proposed Work
in YOLO format, describing each bounding box with
center coordinates (x, y), width w, height h, and class
label. The approach aligns with the YOLO training
pipeline and supports efficient computation of bound-
ing box regression, optimizing the model’s perfor-
mance.The proposed system leverages YOLO11 pre-
trained weights, fine-tuned over 50 epochs on this
specific dataset.
A batch size of 8 was employed during train-
ing to balance computational efficiency and perfor-
mance. Evaluation metrics, including mAP (mean
average precision), precision, and recall, were used
to assess the model’s effectiveness. Deployment on
edge devices demonstrated YOLO11’s computational
efficiency, enabling real-time pedestrian and vehi-
cle detection in dynamic environments. This robust
and scalable system showcases YOLO11’s ability to
tackle the challenges of real-time object detection in
complex urban landscapes.
4 RESULTS AND ANALYSIS
The performance of the YOLO11 model was eval-
uated for its ability to detect pedestrians and vehi-
cles in urban traffic scenarios using precision, recall,
and mean Average Precision (mAP) as key evaluation
metrics. The findings highlight the strengths of the
model while identifying areas that require further de-
velopment.
The Precision Recall (PR) curve (Figure.3) illus-
Figure 3: Precision-Recall curve highlighting performance
across two classes: pedestrians and vehicles.
trates the detection capabilities for pedestrians and ve-
hicles. An overall mAP of 88.0% was achieved at an
Intersection over Union (IoU) threshold of 0.5. Ve-
hicle detection exhibited superior performance with
an mAP of 89.1%, while pedestrian detection lagged
behind at 86.8%. The disparity underscores the effec-
tiveness of the model in detecting larger, distinct ob-
jects such as vehicles, while revealing difficulties with
smaller or partially occluded objects such as pedestri-
ans. Furthermore, the PR curve demonstrates consis-
tent precision across recall levels for vehicles, con-
trasting with a noticeable decrease in precision for
pedestrians at higher recall values.
Figure 4: Precision-Confidence curve illustrating the per-
formance of the YOLO model at different confidence
thresholds.
The Precision-Confidence curve (Figure.4) illus-
trates the performance of our YOLO model, trained
to detect pedestrian and vehicle classes. The orange
and light blue lines represent class-wise precision at
varying confidence levels, while the bold blue line
denotes the overall performance, achieving a preci-
sion of 1.00 at a confidence threshold of 0.975. The
curve highlights the model’s reliability across confi-
dence ranges and serves as a basis for selecting an
optimal confidence threshold to balance precision and
recall in real-world applications. Such an analysis is
INCOFT 2025 - International Conference on Futuristic Technology
170
essential for assessing the robustness of object detec-
tion models.
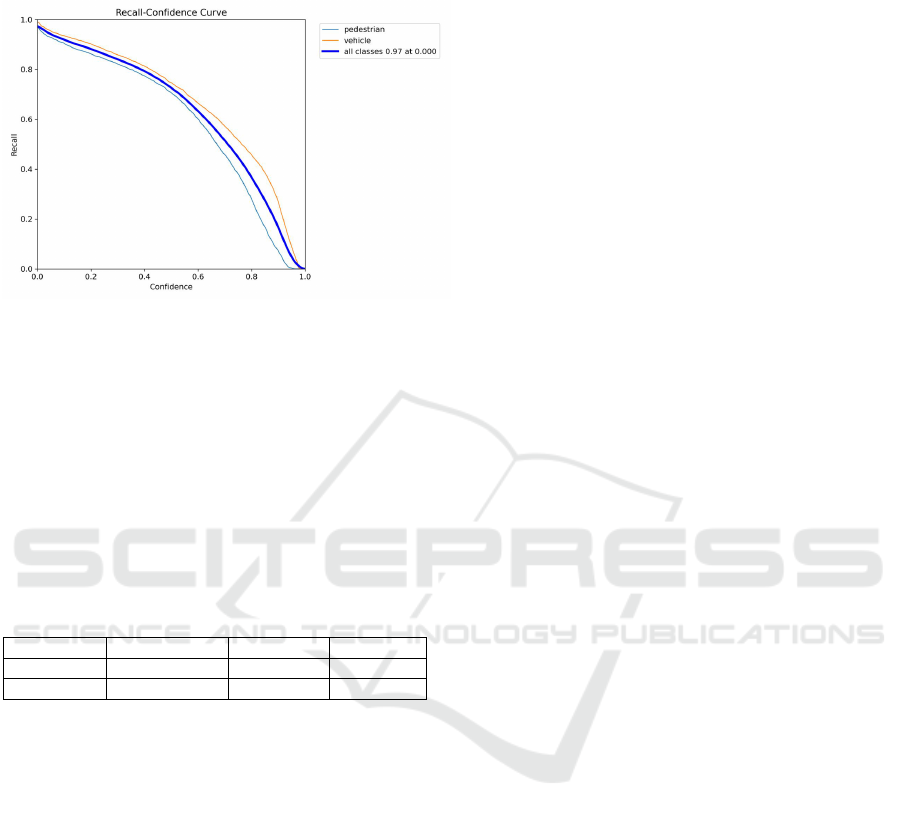
Figure 5: Recall-Confidence curve demonstrating the trade-
off between recall and confidence thresholds.
The Recall-Confidence curve (Figure.5) provides
a clearer picture of the trade-off between recall and
confidence thresholds. At a confidence threshold of
0.0, the model achieved a maximum recall of 0.97,
demonstrating its ability to detect the majority of ob-
jects under relaxed confidence conditions. However,
as the confidence threshold increased, recall began to
decline, highlighting the inherent trade-off between
detecting as many objects as possible and ensuring
high precision.
Table 1: Comparison between YOLOv10 and YOLO11
Metric Precision (P) Recall (R) mAP@50
YOLOv10 0.756 0.708 0.794
YOLO11 0.84 0.782 0.88
The YOLO11 model achieves an impressive infer-
ence time of 7-10ms per frame, making it highly suit-
able for real-time traffic management and pedestrian
safety applications. While the results are promis-
ing, challenges persist in handling occlusions and de-
tecting smaller objects. Despite these limitations,
YOLO11 shows a strong potential for real-time ob-
ject detection, particularly vehicle detection, but re-
fining pedestrian detection and conducting extensive
real-world evaluations are essential to maximize its
effectiveness in smart city infrastructure.
5 CONCLUSION AND FUTURE
WORK
YOLO11 excels in real-time detection of pedestri-
ans and vehicles in urban traffic, utilizing CSPDark-
net for feature extraction and Soft-NMS for manag-
ing overlapping objects. It demonstrates strong per-
formance in crowded environments, varying lighting
conditions, and small object detection, significantly
aiding in effective traffic management and enhancing
road safety.
Improvements on low-light detection, object
recognition of bicycles and road signs, partially cov-
ered objects, and optimization for edge devices will
be part of future work. Traffic prediction tools will
also be added, and testing in live traffic can provide
valuable insights for further enhancement.
REFERENCES
Bochkovskiy, A. et al. (2020). Yolov4: Optimal speed
and accuracy of object detection. arXiv preprint,
arXiv:2004.10934.
Brown, R. and Green, E. (2022). Transformers in computer
vision: A comprehensive review. Journal of Vision
Technology, 12(4):45–67.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 886–893.
Gao, L. and Wu, Y. (2024). Future directions in optimizing
yolo models for resource-constrained environments.
Journal of Artificial Intelligence and Applications.
Girshick, R. (2015). Fast r-cnn. In Proceedings of the IEEE
International Conference on Computer Vision (ICCV),
pages 1440–1448.
He, K. et al. (2016). Deep residual learning for image recog-
nition. Proceedings of the IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
770–778.
Jegham, N., Koh, C. Y., Abdelatti, M., and Hendawi,
A. (2024). Evaluating the evolution of yolo (you
only look once) models: A comprehensive benchmark
study of yolo11 and its predecessors.
Jiang, L. et al. (2019). Spatial pyramid pooling in deep
convolutional networks for visual recognition. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 41(7):1717–1728.
Li, J., Zhang, Y., and Xie, L. (2024). Ai-powered object
detection: From yolo to advanced architectures. arXiv
preprint arXiv:2401.01234.
Liang, X. et al. (2023). Yolov11: Advancing real-time ob-
ject detection with enhanced features and efficiency.
IEEE Transactions on Pattern Analysis and Machine
Intelligence.
Liu, W. et al. (2016). Ssd: Single shot multibox detector.
In Proceedings of the European Conference on Com-
puter Vision (ECCV), pages 21–37.
Redmon, J. et al. (2016). You only look once: Unified,
real-time object detection. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 779–788.
Smart City Application: Real-Time Pedestrian Detection Using YOLO11 Architecture
171

Ren, S. et al. (2015). Faster r-cnn: Towards real-time object
detection with region proposal networks. In Advances
in Neural Information Processing Systems (NeurIPS),
pages 91–99.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), pages 511–518.
Wang, C.-Y. et al. (2023). Yolov7: Trainable bag-of-
freebies sets new state-of-the-art for real-time object
detectors. arXiv preprint, arXiv:2207.02696.
Wang, K. et al. Yolov11: State-of-the-art object detec-
tion for next-generation applications. arXiv preprint
arXiv:2304.12345.
Zhang, W., Wang, K., and Yang, S. (2020). A review on
pedestrian detection based on deep learning. Neural
Computing and Applications, 32(5):1515–1532.
Zheng, L. et al. (2024). Improvement of the yolov8 model
in the optimization of the weed recognition algorithm
in cotton field. Plants, 13(13):1843.
INCOFT 2025 - International Conference on Futuristic Technology
172
