
Smart Detection Systems for Traffic Sign Recognition: Pioneering Road
Safety Solutions with YOLO Models
Abhay Divakar Patil
a
, Sakshi Sonoli
b
, Sanjeet Kalasannavar
c
, Shreyas Rajeev Patil
d
and Prema T. Akkasaligar
e
Department of Computer Science and Engineering, KLE Tech, University, Dr. MSSCET, Belagavi, India
Keywords:
ADAS, YOLO, Self Attention Mechanisms, Preprocessing Techniques, Data Augmentation, Segmentation,
Transformer Based Architectures.
Abstract:
Traffic sign detection is crucial for autonomous vehicles (AVs) and advanced driver-assistance systems
(ADAS). Detecting Indian traffic signs is challenging due to diverse designs, environmental conditions, and
multilingual content. This paper proposes a method integrating self-attention mech- anisms with You Only
Look Once (YOLO) models, such as YOLO11n,YOLO11s, and YOLOv8n. The self-attention modules en-
hance feature extraction and localization in complex scenarios like occlusions and low-light conditions. Pre-
processing techniques, including segmentation and data augmentation, play a significant role in improving
model performance. This research contributes to the advancement of traffic sign detection in real-world sce-
narios and provides a foundation for future innovations, such as transformer-based architectures.
1 INTRODUCTION
Traffic Sign Detection plays a crucial role in both
autonomous vehicles and traffic management sys-
tems. By utilizing both visual and infrared technol-
ogy, these systems can reliably recognize and inter-
pret road signs even in complex conditions such as
poor lighting, adverse weather, or cluttered environ-
ments. The autonomous vehicles and traffic systems
become more prevalent, ensuring their ability to de-
tect road signs accurately is essential for maintaining
road safety, reducing accidents, and enhancing traffic
flow. Failure to detect signs in time could lead to seri-
ous consequences, making reliable traffic sign detec-
tion a critical need for future transportation systems.
Apparently one person dies from a traffic accident ev-
ery 24 seconds worldwide, which amounts to roughly
1.3 million fatalities per year. An additional 20-50
million individuals get serious injuries (Dewi, Chen,
et al. 2024). Road accidents are the major cause of
mortality for young people and children between the
ages of 5 years and 29 years. It ranks as the eighth
a
https://orcid.org/0009-0004-7651-905X
b
https://orcid.org/0009-0000-7907-355X
c
https://orcid.org/ 0009-0000-7056-1717
d
https://orcid.org/0009-0002-5164-5186
e
https://orcid.org/0000-0002-2214-9389
most common cause of death globally. Developing
countries have a disproportionate share of the eco-
nomic and social
costs, since traffic-related mishaps can cost them up to
3% of their GDP. Despite having fewer vehicles, they
are responsible for 93% of road fatalities worldwide
(Flores-Calero, Astudillo, et al. 2024)*. Over half of
these fatalities are among vulnerable road users, in-
cluding motorcyclists, cyclists, and pedestrians. Over
90% of deaths worldwide occur in lower- and middle-
income nations, making them the ones that suffer the
most.
Even though just 7% of crash deaths occur in
highincome nations, issues including speeding, dis-
tracted driving, and a growing senior population still
exist. This man-made epidemic can be considerably
reduced by investing in smart traffic management and
preventative measures, which will be far less expen-
sive than the losses to society. With improved accu-
racy and resilience, the suggested model tackles traf-
fic sign identification issues, makes it perfect for real-
time applications such as autonomous electronic vehi-
cle (EV) navigation. Its sophisticated design guaran-
tees dependability, raising road safety standards and
providing a scalable response to contemporary trans-
portation demands.
Current state-of-the-art solutions use advanced
computer vision techniques, including deep learning
Patil, A. D., Sonoli, S., Kalasannavar, S., Patil, S. R. and Akkasaligar, P. T.
Smart Detection Systems for Traffic Sign Recognition: Pioneering Road Safety Solutions with YOLO Models.
DOI: 10.5220/0013608900004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 3, pages 65-74
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
65

models like Convolutional Neural Networks (CNNs),
combined with sensor fusion methods (e.g., LIDAR
and infrared imaging) to identify and classify traffic
signs under various conditions. These methods have
shown success in controlled environments but face
challenges in more complex real-world scenarios.
Despite of recent advances, existing solutions
struggle in scenarios involving occlusion, varying
weather conditions, and changes in lighting. Further-
more, realtime processing with high accuracy remains
a challenge, particularly in highly dynamic environ-
ments such as highways or urban streets.
To address these challenges, our study focuses on
developing a robust machine learning model for traf-
fic sign detection, capable of handling diverse and
complex scenarios. By leveraging advanced tech-
niques and a comprehensive dataset, we explore vari-
ations of the You Only Look Once (YOLO) object de-
tection framework, including YOLO11n, YOLO11s,
and YOLOv8. YOLO11n and YOLO11s incorporate
self-attention mechanisms to enhance feature extrac-
tion, while YOLOv8 serves as a baseline for perfor-
mance comparison. These models are designed to
improve the accuracy, speed, and reliability of traf-
fic sign detection, making them suitable for real-time
applications and contributing to enhanced road safety
standards.
2 LITERATURE SURVEY
A key component of intelligent transportation sys-
tems, traffic sign detection and recognition (TSDR).
It is essential for both unmanned vehicle operations
and road safety. Early approaches has limits in terms
of their adaptability in the real world because they de-
pended on conventional computer vision techniques
like color segmentation and analysis. TSDR is rev-
olutionized by the advent of machine learning and
deep learning, which allowed models to acquire in-
tricate patterns and attain great accuracy in dynamic
settings. Resilience under various circumstances still
exist due to notwithstanding progress, issues includ-
ing edgecase accuracy, computing effectiveness. This
overview examines the development of TSDR, exam-
ining conventional methods, contemporary develop-
ments, and continuing chances for creativity in safe
traffic sign recognition.
In (Mannan et al., 2019), propounded a method
for bifurcating ordinary site visitors symptoms the us-
age of adaptive models and switch learning. They
employed a modified Gaussian mixture model and
CNNs to decorate detection and popularity accu-
racy. The system adapts to image distortion how-
ever calls for specialized hardware like GPUs for
green processing. In(Lopez-Montiel et al., 2021),
evaluated deep gaining knowledge of-based totally
visitors detection the usage of MobileNet v1 and
ResNet50 with SSD. TPUs significantly outper-
formed GPUs,implying faster processing and higher
detection accuracy, although ResNet50 had high
memory needs. In (Boujemaa et al., 2021), added
the ATTICA dataset for Arabic visitors symptoms. R-
FCN performed the first-class overall performance in
detecting and spotting traffic symptoms, although de-
manding situations consisting of class conflicts and
language-particular issues had been cited. In (Triki
et al., 2024), assessed TSR structures on Raspberry
Pi and Nvidia Jetson Nano. The Jetson Nano exhib-
ited higher detection accuracy and velocity, but each
structures faced limitations on low-give up gadgets.
In (Greenhalgh and Mirmehdi, 2015), evolved a site
visitors sign text detection machine employing MSER
functions and HSV coloration space with OCR for
textual content popularity. It performed high detec-
tion accuracy but multiplied complexity may want to
have an effect on performance.
In (Youssef et al., 2016), devised a cutting-edge
method for identifying traffic signs that utilizes color
segmentation techniques along with HOG and CNNs.
Advantage: This approach allows for rapid identifi-
cation of road signs. Disadvantage: It necessitates
preprocessing to effectively narrow down the search
parameters. In (Avramovi
´
c et al., 2020), developed
a detection framework for traffic signs within high-
definition imagery, employing several YOLO archi-
tectures. Advantage: This system provides high accu-
racy in detecting signs under HD conditions. Disad-
vantage: It demands considerable computational re-
sources for efficient parallel processing. In (Fleyeh
and Dougherty, 2006), examined a range of strate-
gies for recognizing road signs, focusing on tech-
niques that analyze both color and shape. Advantage:
Their work encompasses a broad spectrum of detec-
tion techniques. Disadvantage: A lack of standard-
ization for color extraction methods remains a chal-
lenge. In (Tabernik and Sko
ˇ
caj, 2020), introduced a
sophisticated system for large-scale traffic sign detec-
tion using an enhanced version of Mask R-CNN. Ad-
vantage: This method achieves high levels of preci-
sion in sign recognition. Disadvantage: It faces dif-
ficulties in detecting smaller signs in intricate envi-
ronments. In (Flores-Calero et al., 2024a), With its
remarkable accuracy and real-time speed, the YOLO
algorithm transforms traffic sign identification and is
perfect for ADAS and autonomous driving applica-
tions. Its ability to effectively detect objects even with
sparse data is its strength. But issues include trouble
INCOFT 2025 - International Conference on Futuristic Technology
66

seeing tiny or hidden signals and performance lapses
in bad weather or low-resolution situations point to
areas that need improvement. Because of its acces-
sibility and agility, YOLO serves as a foundation for
safer, smarter roads and encourages continuous inno-
vation to go over its practical constraints.
In (Flores-Calero et al., 2024b), a systematic re-
view was conducted on the application of YOLO ob-
ject detection algorithms for traffic sign detection and
recognition. The study analyzed 115 research pa-
pers from 2016–2022, identifying three main appli-
cations: road safety, ADAS, and autonomous driv-
ing. The GTSDB and GTSRB datasets were fre-
quently utilized for benchmarking. The most com-
monly used hardware included Nvidia RTX 2080 and
Titan Tesla V100 GPUs, alongside Jetson Xavier NX
for embedded systems. The study highlighted a wide
mAP range from 73% to 89%, with YOLOv5 be-
ing the most efficient version. Challenges such as
lighting variability, adverse weather, and partial oc-
clusion were extensively discussed. However, ad-
dressing complex real-world scenarios remains a lim-
itation. This review provides a foundational anal-
ysis for advancing YOLO-based systems for robust
traffic environments. In (Dewi et al., 2024), devel-
oped a method to improve road marking visibility
at night for autonomous vehicles using YOLO mod-
els. Combining CLAHE with YOLOv8 yielded 90
percent accuracy, precision, and recall. Advantage:
Enhanced detection of road signs in low-light con-
ditions for safer driving. Disadvantage: Real-time
processing demands significant computational power.
In (Gao et al., 2024), proposed a CNN-based sys-
tem for detecting traffic signs under adverse condi-
tions like rain and fog. The model, which includes
VGG19, Enhance-Net, and YOLOv4, reached 95.03
percent accuracy and improved detection speed by
12.03 fps. Advantage: Faster and more resilient de-
tection in harsh conditions. Disadvantage: Accuracy
may drop slightly under specific challenging environ-
ments.
In (Cao et al., 2024), introduced YOLOv7-tiny-
RCA, a lightweight traffic sign detection system for
edge devices. Using ELAN-REP, CBAM, and AFPN
modules, the model achieved 81.03 percent mAP with
fewer parameters and faster inference speeds. Advan-
tage: Ideal for real-time edge applications due to its
efficiency. Disadvantage: Struggles with highly oc-
cluded or complex scenes. In (Khalid et al., 2024)
employed the YOLOv5s model for detection, cou-
pled with the MSER algorithm for text localization
and OCR for text recognition, using the ASAYAR
dataset. This approach demonstrated high accuracy
and reduced false positives, though it faced challenges
with occluded panels and highlighted the need for
more robust handling of occlusions. In (Mahadshetti
et al., 2024) proposed a YOLOv7-based model with
SE blocks and attention mechanisms, utilizing the
GTSDB dataset. This model achieved an impressive
mAP of 99.10% and significantly reduced model size
by 98%, yet struggled in complex road environments,
indicating limited adaptability to varied conditions.
In (Valiente et al., 2023)introduced a system com-
bining YOLO, OCR, and machine learning for de-
tection, text extraction, and 3D orientation analysis,
applied to a dataset of degraded traffic signs. Their
model excelled in detecting degraded signs with high
accuracy but required GPU support for real-time per-
formance, while preprocessing steps added computa-
tional overhead. These studies underscore the effec-
tiveness of YOLO-based approaches but also high-
light recurring challenges such as occlusions, envi-
ronmental variability, and computational demands.
As a result of deep learning, traffic sign identi-
fication and recognition made great progress, with
high accuracy and real-time performance. This study
shows resilience in difficult situations, including re-
mote or blurry indicators, and improves detection ac-
curacy. Enhancing TSDR’s dependability and influ-
ence on intelligent transportation systems will need
tackling the outstanding issues with edge-case han-
dling and efficiency.
3 PROPOSED METHODOLOGY
Traffic sign detection and recognition (TSDR) is es-
sential for autonomous vehicles and intelligent traffic
systems, requiring reliable solutions to handle com-
plex real-world conditions. The YOLO (You Only
Look Once) framework is renowned for its real-time
performance, combining region proposal and classi-
fication into a single network. The latest version,
YOLO11, incorporates advancements such as refined
loss functions for better accuracy, anchor-free detec-
tion for reduced complexity, and transformer-based
attention mechanisms for enhanced feature extrac-
tion. These features address challenges like occlu-
sion, variable lighting, and real-time processing, mak-
ing YOLO11 ideal for TSDR applications.
This study utilizes the Indian Road Traffic
Sign Dataset (IRTSD-Datasetv1), annotated with
Roboflow, which includes 37 classes of traffic signs
such as ”No Parking,” ”Pedestrian Crossing,” ”Speed
Limit 40,” and so on. The dataset captures di-
verse scenarios, including varying weather condi-
tions, lighting environments, and occasional occlu-
sion, while assuming negligible motion blur and high-
Smart Detection Systems for Traffic Sign Recognition: Pioneering Road Safety Solutions with YOLO Models
67
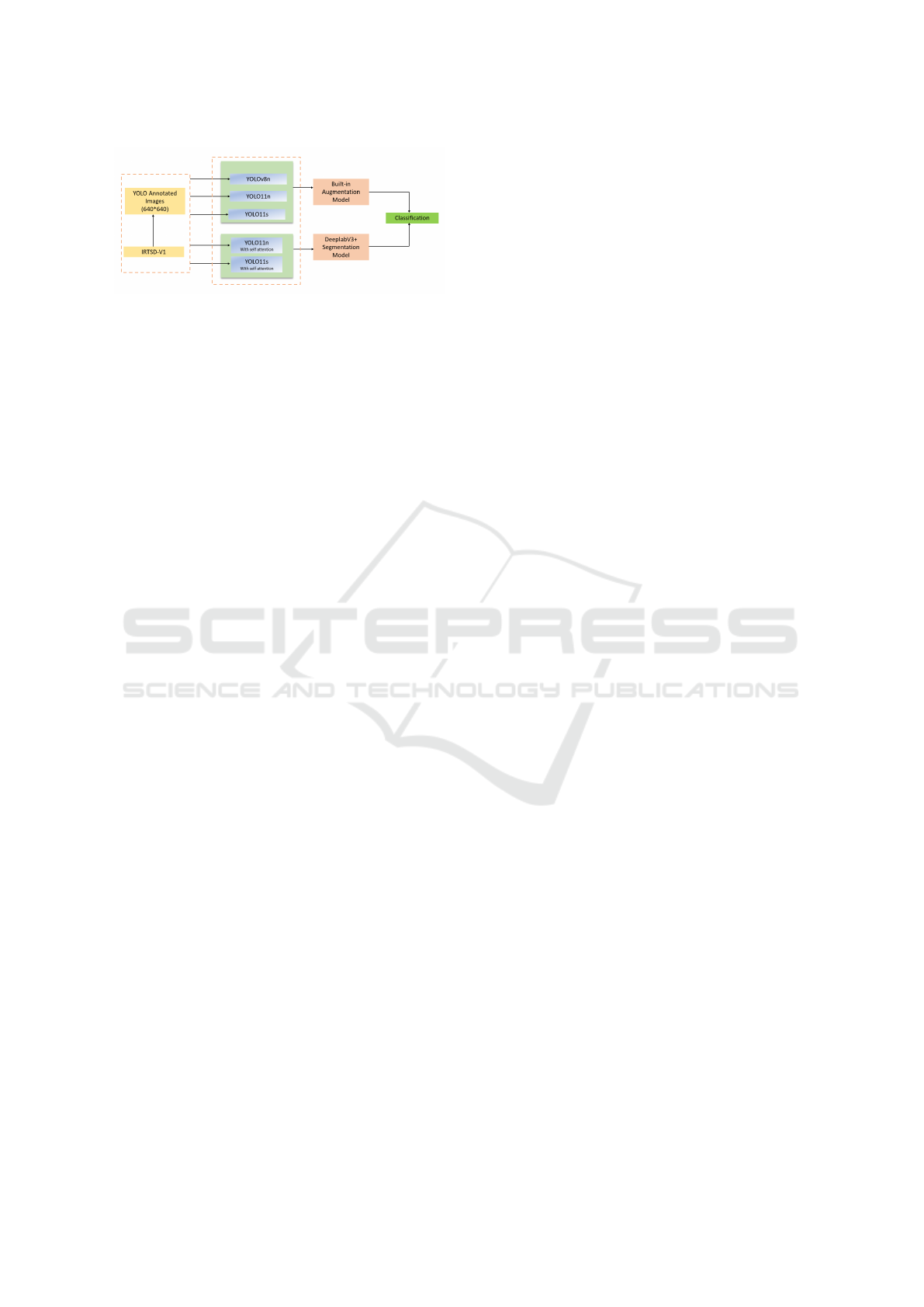
Figure 1: Workflow of the proposed method using the
IRTSD-V1 dataset. YOLO-annotated images (640×640)
are processed through two model streams: standard YOLO
models (YOLOv8n, YOLO11n, YOLO11s) with built-in
augmentation and enhanced YOLO models (YOLO11n,
YOLO11s) integrated with self-attention. Outputs from
these models are passed to a built-in augmentation module
or DeepLabV3+ segmentation model for final classification
quality input feeds. The proposed work incorpo-
rates training and evaluvation of three YOLO vari-
ants YOLO11n, YOLO11s, and YOLOv8 as shown
in Fig. 1. Along with this also trained YOLO11n and
YOLO11s with self-attention mechanisms to improve
feature extraction in complex scenes. YOLOv8, serv-
ing as a baseline, does not incorporate attention but
provides a comparison for assessing the impact of at-
tention mechanisms. These models are trained on the
annotated dataset, emphasizing the detection of signs
under challenging conditions such as partial occlusion
and low contrast.
With the growing adoption of autonomous vehi-
cles, TSDR systems must reliably handle real-world
complexities. For example, autonomous vehicles in
urban areas must accurately detect signs that may be
obscured by sunlight or partially blocked by other ve-
hicles. Inaccurate or delayed detection could lead
to serious consequences, including traffic violations
or accidents. By leveraging YOLO’s advanced ca-
pabilities, this research seeks to improve TSDR per-
formance for Indian roadways, contributing to safer
and more efficient transportation systems.Objectives
are as followed
Design and Implement a Robust Traffic Sign De-
tection and Recognition System: Develop an efficient
system that accurately detects and recognizes traf-
fic signs from real-time video frames or images, us-
ing the Indian traffic sign dataset (IRTSD-Datasetv1).
This system should be capable of handling variations
in sign size, orientation, and lighting
conditions.
Leverage the YOLO Architecture for Real-time
Detection: Utilize the YOLO11n, YOLO11s, and
YOLOv8 models for object detection tasks, chosen
for their speed and accuracy in
detecting traffic signs in real-world environments.
Implement these models with appropriate adaptations
and fine-tuning to meet the requirements of traffic
sign detection.
Enhance Model Performance with Attention
Mechanisms: Integrate self-attention mechanisms in
the YOLO11n and YOLO11s models to improve the
detection of small and occluded traffic signs. This
aims to enhance the model’s focus on critical areas
of the image, increasing detection accuracy and ro-
bustness.
Conduct Comparative Analysis Across Multiple
Models: Perform a thorough evaluation of different
model architectures, including YOLO11n, YOLO11s
with and without attention, and YOLOv8. The goal
is to assess the impact of attention mechanisms and
compare the performance in terms of accuracy, infer-
ence speed, and robustness in real-world scenarios.
Optimize and Fine-tune Hyperparameters for Im-
proved Accuracy: Experiment with various hyperpa-
rameters (e.g., learning rate, batch size, epochs) and
techniques (such as data augmentation) to optimize
model performance and ensure robust generalization
across diverse traffic sign types and environments.
There are 4,553 annotated traffic sign images in
IRTSD-v1 dataset, which are divided into 37 differ-
ent classes. This dataset is annotated for YOLO clas-
sification by the means of Roboflow. The Annotated
IRTSD-v1 is then fed to multiple YOLO architectures
with all the requirements of YOLO being fulfilled.
The pairwise self-attention process is shown in
Fig. 3 , where the attention weight α( f
i
, f
j
) is calcu-
lated by extracting relational information using trans-
formations ϕ and ψ. The original input is added as
a residual link, and the transformed feature β( f
j
) is
coupled with the attention weight using the Hadamard
product. A context-aware feature map is produced
by refining the output using Batch Normalization and
LeakyReLU (Wang et al., 2020).
Pairwise self-attention is defined as in equation (1)
f
′
i
=
∑
j∈R(i)
α( f
i
, f
j
) ⊙ β(f
j
), (1)
where ⊙ represents the Hadamard product, i indicates
the spatial index of the feature vector f
i
, and R(i) is
the local footprint. The attention weight α is decom-
posed as:
α( f
i
, f
j
) = γ(δ( f
i
, f
j
)), (2)
where δ( f
i
, f
j
) encodes the relation between f
i
and f
j
through trainable transformations φ and ψ. Position
encoding normalizes coordinates to [−1, 1], calculates
differences p
i
− p
j
, and concatenates them with fea-
tures before mapping.
Fig. 2 illustrates the implementation that utilized
the IRTSD-Datasetv1, which contains 37 classes of
traffic signs, and followed a series of preprocessing
INCOFT 2025 - International Conference on Futuristic Technology
68
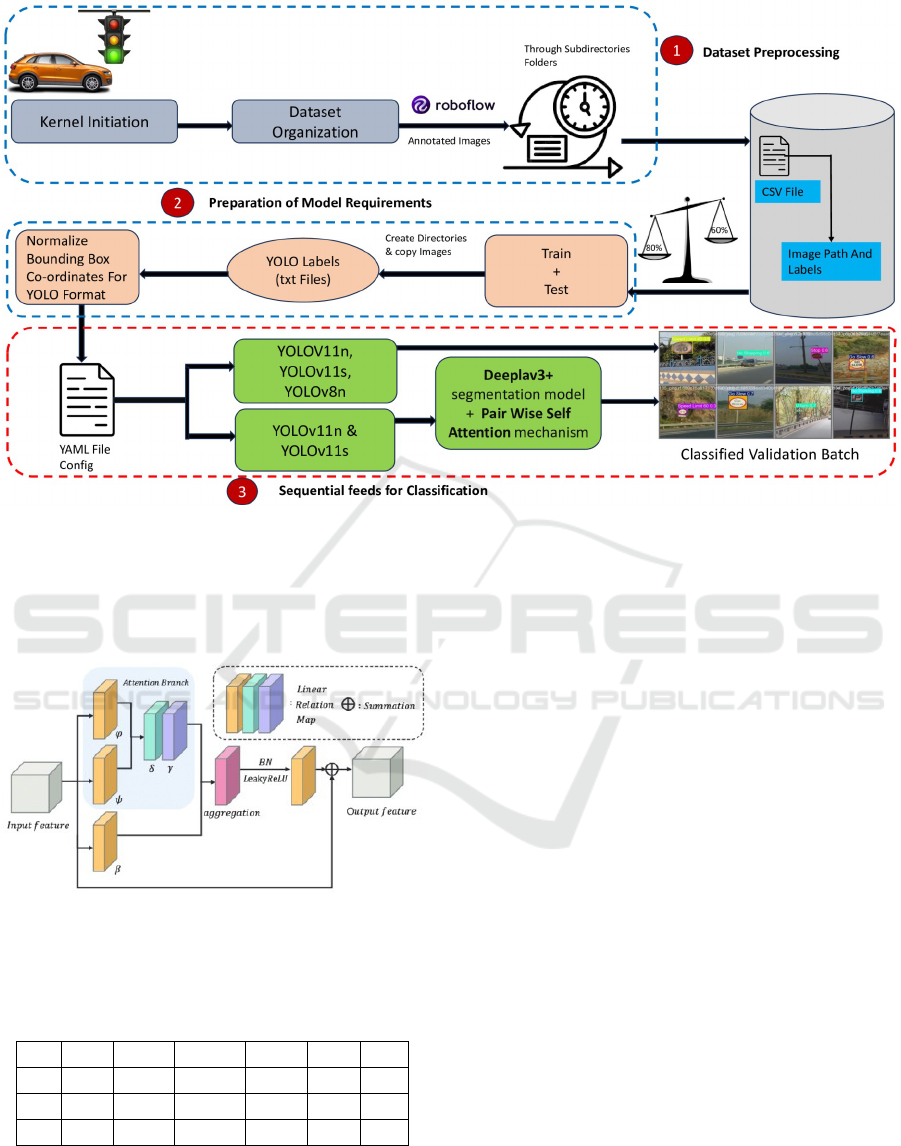
Figure 2: The end-to-end pipeline of the traffic sign detection and recognition using the IRTSD-V1 dataset. The process is
divided into three stages: (1) Dataset Preprocessing, where annotated images are organized and split into training and testing
sets; (2) Preparation of Model Requirements, involving normalization of bounding box coordinates, generation of YOLO
labels, and configuration setup for training; and (3) Sequential Feeds for Classification, utilizing YOLOv11n, YOLOv11s,
YOLOv8, and DeepLabv3+ models with a Pair-Wise Self-Attention mechanism to produce accurately classified validation
batches.
Figure 3: Illustration of the pairwise self-attention mech-
anism, demonstrating how input features are transformed
through attention branches and aggregated to produce
context-aware output features.
Table 1: Parameters of YOLOv8n, YOLO11n, and
YOLO11s Models
Model Size (pixels) mAPval 50-95 Speed CPU (ms) Speed T4 (ms) Params (M) FLOPs (B)
YOLOv8n 640 37.3 80.4 0.99 3.2 8.7
YOLO11n 640 39.5 56.1 1.5 2.6 6.5
YOLO11s 640 47.0 90.0 2.5 9.4 21.5
steps to prepare the data for training. The raw images
are annotated using Roboflow, enabling the creation
of bounding boxes and class labels for each object in
the image. To enhance the dataset, data augmentation
techniques, including rotation, flipping, zooming, and
scaling, are applied. This helped improve the model’s
robustness and prevent overfitting. Additionally, pixel
normalization is applied to scale all pixel values to a
range of 0 to 1, aiding the convergence process during
training. The dataset is split into training, validation,
and test sets with a 70%, 15%, and 15% ratio, respec-
tively.
In terms of model architecture, four variants of
the YOLO11 and YOLOv8 models are explored.
YOLO11n (without attention) is a lightweight ver-
sion optimized for real-time object detection, focus-
ing on speed and efficiency. While fast, it may not
achieve the highest accuracy, especially in detecting
small or overlapping objects. YOLO11s (with self-
attention) incorporates a self-attention mechanism to
enhance feature learning, improving detection accu-
racy, especially for complex and small traffic signs.
YOLO11s (without self-attention) is a simpler ver-
sion of YOLO11s, which trades off some accuracy
for increased speed. YOLOv8n, the most advanced
model, is designed to be faster and more accurate
than its predecessors, but it does not incorporate the
self-attention mechanism, which may lead to the loss
Smart Detection Systems for Traffic Sign Recognition: Pioneering Road Safety Solutions with YOLO Models
69

of subtle features. The models are evaluated based
on precision, recall, F1-score, and mean average pre-
cision (mAP). YOLOv8 provided the best overall
performance in terms of speed and accuracy, while
YOLO11s with self-attention showed superior results
in handling complex detection scenarios, particularly
with occlusions or similar-looking signs. The inclu-
sion of data augmentation and preprocessing steps is
crucial for improving the robustness of the models,
allowing them to handle varying lighting conditions,
angles, and occlusions.
In conclusion, YOLOv8 delivered the best perfor-
mance for real-time traffic sign detection, surpassing
YOLO11n. However, YOLO11s and YOLO11n with
self-attention proved effective in complex detection
tasks. Data preprocessing and augmentation sig-
nificantly enhanced the models’ ability to handle
challenging detection environments.
The Algorithm 1 shows step by step process of
Pair-Wise Self Attention mechanism of YOLO.
Algorithm 1 Pairwise Attention Mechanism for Fea-
ture Enhancement
Input: Feature map F ∈ R
H×W ×C
2: Output: Enhanced feature map F
enhanced
∈
R
H×W ×C
# Step 1: Input Transformation
4: Reshape the feature map F into a sequence F
seq
∈
R
(H×W )×C
Initialize the pairwise attention weights matrix
W
attn
∈ R
(H×W )×(H×W )
6: # Step 2: Pairwise Attention Computation
for each pair (i, j) where i, j ∈ {1, 2, . . . , H ×W }
do
8: Compute similarity: S
i j
=
softmax(dot(F
seq
[i], F
seq
[ j]))
Update attention weights: W
attn
[i, j] = S
i j
10: end for
# Step 3: Weighted Feature Aggregation
12: for each feature vector F
seq
[i] where i ∈
{1, 2, . . . , H ×W } do
Aggregate features:
F
seq
[i]
enhanced
=
∑
j
W
attn
[i, j]· F
seq
[ j]
14: end for
# Step 4: Output Transformation
16: Reshape F
seq, enhanced
∈ R
(H×W )×C
back to
F
enhanced
∈ R
H×W ×C
Return: F
enhanced
The Algorithm 2 shows step by step process of
YOLO performing Object Detection.
Algorithm 2 YOLO-based Object Detection Algo-
rithm
1: Input: Input image I of size 640 × 640 × 3, pre-
trained YOLO model weights, confidence thresh-
old, IoU threshold
2: Output: Bounding boxes B = {b
1
, b
2
, . . . , b
n
}
and class probabilities P = {p
1
, p
2
, . . . , p
n
}
3: # Step 1: Image Preprocessing
4: Resize the input image I to the YOLO model’s
required input size (e.g., 640 × 640 pixels)
5: Normalize pixel values to the range [0, 1]
6: Convert the image into a tensor format suitable
for the YOLO model
7: # Step 2: Feature Extraction
8: Pass the preprocessed image through the YOLO
backbone network
9: Extract multi-scale feature maps from the input
image
10: # Step 3: Object Detection
11: Apply detection heads to the extracted feature
maps
12: Predict bounding box coordinates, objectness
scores, and class probabilities
13: Filter predictions using a confidence threshold
(e.g., 0.5)
14: # Step 4: Non-Maximum Suppression (NMS)
15: for each detected class do
16: Sort bounding boxes by their confidence
scores
17: Remove overlapping boxes based on the In-
tersection over Union (IoU) threshold (e.g., 0.5)
18: end for
19: # Step 5: Post-Processing
20: Map the filtered bounding boxes to the original
image dimensions
21: Assign class labels and confidence scores to each
detected object
22: Return: Bounding boxes B and class probabili-
ties P
4 RESULTS AND DISCUSSION
This study utilizes the YOLO11 and YOLOv8n ar-
chitecture, optimized with self-attention and seg-
mentation mechanisms, for real-time traffic sign de-
tection and classification. The models YOLO11n
and YOLO11s are trained on the IRTSD-Datasetv1,
comprising 4,553 annotated images across 37
classes(Sample images are shown in figure 2), us-
ing PyTorch with data augmentation, early stopping,
INCOFT 2025 - International Conference on Futuristic Technology
70
and the AdamW optimizer. Segmentation prepro-
cessing with DeepLabV3+ and custom self-attention
modules improved feature learning and detection per-
formance. YOLO11s with self-attention achieved
the best results, with an mAP@50 of 84.0%, Preci-
sion of 86.2%, and Recall of 86.4%, outperforming
YOLOv8n and other variants in robustness and accu-
racy, especially under challenging conditions
Table 2: Performance Comparison of YOLOv11 Models
with and without Attention, and YOLOv8
Model Precision Recall mAP@50 mAP@50-95
YOLOv11n
with at-
tention
0.7622 0.7716 0.7855 0.4818
YOLOv11n
without
attention
0.7239 0.7127 0.7326 0.4501
YOLOv11s
with at-
tention
0.8093 0.8181 0.8401 0.5228
YOLOv11s
without
attention
0.7664 0.7754 0.7873 0.4780
YOLOv8 0.7112 0.7246 0.7312 0.4457
(a)
(b)
(c)
(d)
(e)
(f)
(g)
(h)
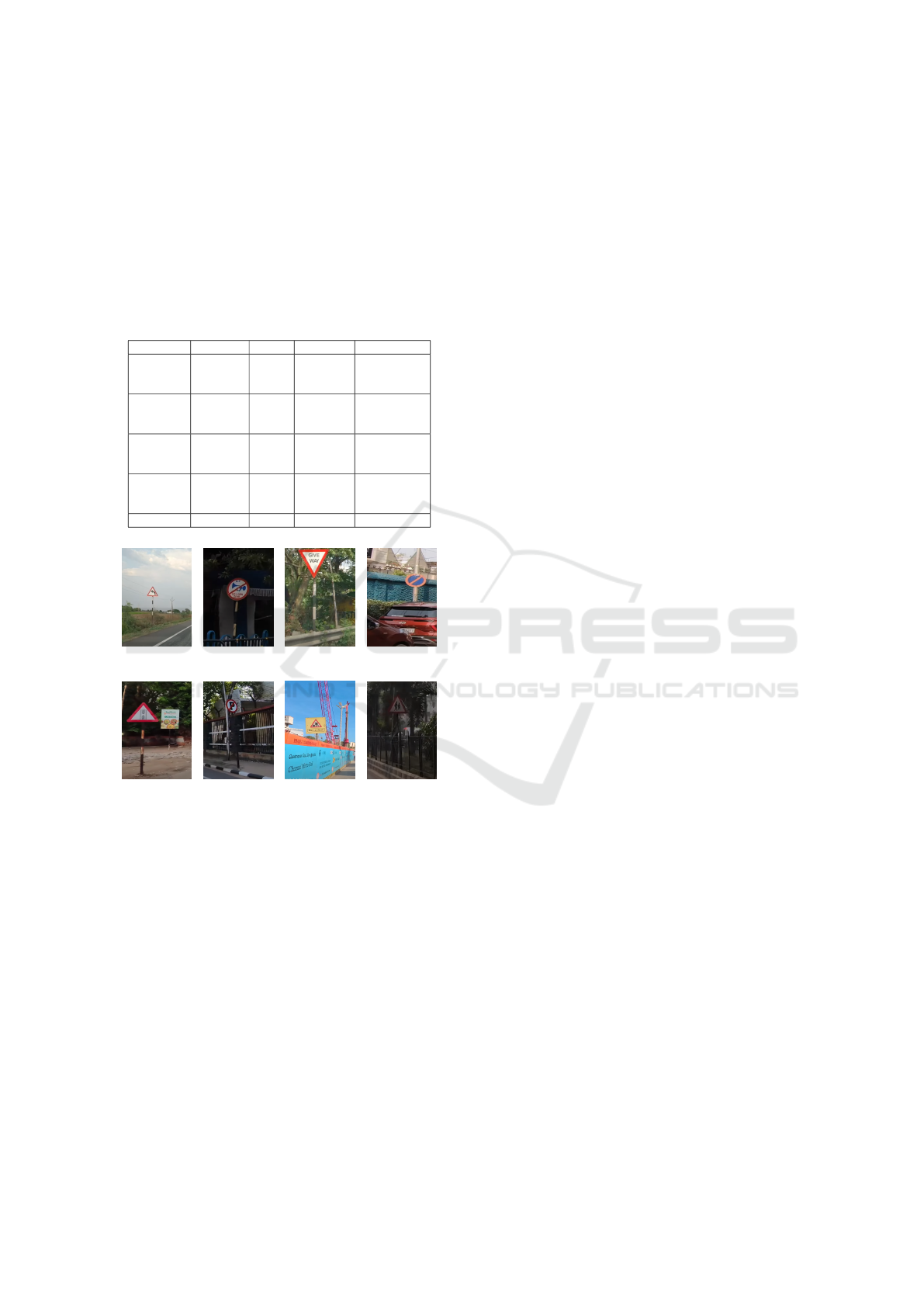
Figure 4: Sample images from the IRTSD-Datasetv1 de-
picting traffic signs in various conditions and settings. (a)
Left Turn; (b) Horn Prohibited; (c) Give Way; (d) No Stop-
ping; (e) Gap In Median; (f) No Parking; (g) Men at Work;
(h) School Ahead.
The performance comparison of different YOLO
models, as presented in Table 2, demonstrates the ef-
ficacy of incorporating attention mechanisms in traf-
fic sign detection and recognition. Among the tested
models, YOLO11n and YOLO11s are evaluated with
and without attention, alongside YOLOv8 as a base-
line. The results highlight the significant improve-
ments achieved by leveraging attention mechanisms,
particularly in enhancing feature extraction and local-
ization capabilities. For the YOLO11n models, the
attention augmented version outperformed the model
without attention across all metrics, achieving a pre-
cision of 0.76 and a recall of 0.77, compared to 0.72
and 0.71, respectively. Similarly, the mAP@50 and
mAP@50-95 values showed a considerable increase
from 0.73 and 0.45 to 0.785523 and 0.48.
The YOLO11s models exhibited even stronger
performance, with YOLO11s with attention emerging
as the best performing model. It achieved a precision
of 0.80, a recall of 0.81, a mAP@50 of 0.84, and a
mAP@50-95 of 0.52. This indicates that the larger
architecture of YOLO11s effectively leverages atten-
tion mechanisms to deliver superior results. In con-
trast, YOLOv8, although efficient and widely used
for real time applications, demonstrated lower accu-
racy, achieving a precision of 0.71, a recall of 0.72, a
mAP@50 of 0.73, and a mAP@50-95 of 0.44. These
metrics underscore the limitations of YOLOv8 in han-
dling complex real-world challenges such as occlu-
sions, varying lighting conditions, and cluttered back-
grounds.
The inclusion of attention mechanisms signifi-
cantly enhances the performance of YOLO models,
particularly in challenging scenarios. YOLO11
models with attention consistently outperformed
their non-attention counterparts, highlighting their
robustness and reliability. The results affirm the
potential of attention-augmented YOLO11 models,
especially YOLO11s with attention, for real-time
traffic sign detection in autonomous vehicle systems
which is computed with the phenomena of feeding
an complex and robust traffic sign image to all the
models shown in Fig. 5.YOLO11s employed with
self attention dominating the classification results in
achieving astonishing precision and recall as shown
in Fig. 6 and Fig. 7 respectively.High precision and
recall, along with strong mAP values, the proposed
models demonstrate their capability to address prac-
tical difficulties in traffic sign recognition, ensuring
safe and efficient operation in real-world applications.
To verify the performance of the YOLO fam-
ily on the IRTSD-Datasetv1, an illustration is pro-
vided in Fig. 8. It depicts the mAP (mean Aver-
age Precision) at 50% IoU for YOLO models over
the first 60 epochs, highlighting the impact of self-
attention mechanisms and architectural variations.
Models integrated with attention mechanisms, such as
YOLO11n with attention and YOLO11s with atten-
tion, consistently outperform their counterparts with-
out attention, demonstrating improved feature repre-
sentation and detection accuracy.
As shown in Figure 8, The graph shows the
Comparison of mAP (metrics/mAP50(B)) vs Epoch
for Different YOLO Models (First 60 Epochs) and
the performance of five YOLO models, including
Smart Detection Systems for Traffic Sign Recognition: Pioneering Road Safety Solutions with YOLO Models
71
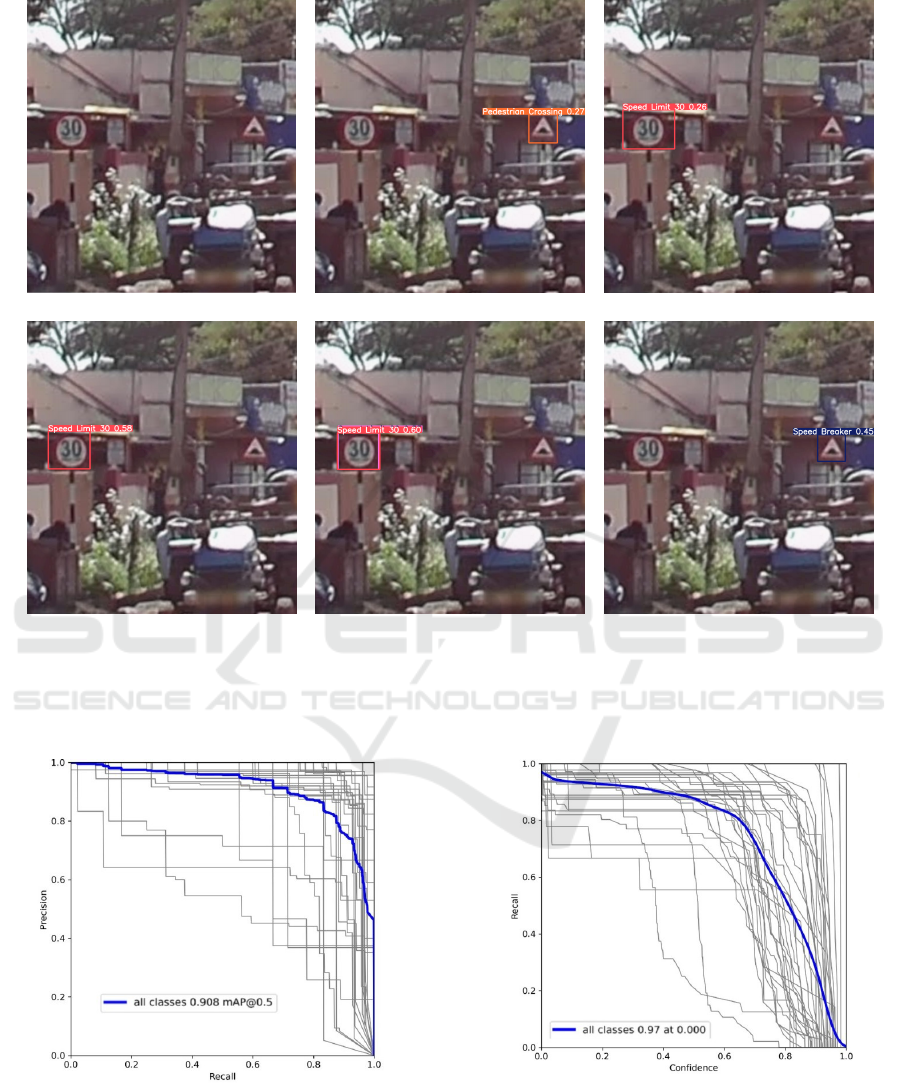
(a) (b) (c)
(d) (e) (f)
Figure 5: Classification performed by different YOLO models for a robust and occluded traffic sign image. (a) Cluttered
and Robust Traffic Sign Image, (b) YOLOv8n classification on the image, (c) YOLO 11n classification on the image, (d)
YOLO 11s classification on the image, (e) YOLO 11n With Self Attention classification, (f) YOLO 11s With Self Attention
classification.
Figure 6: Precision-Recall Curve of YOLO11s
employed with Self Attention
YOLOv11n and YOLOv11s with and without atten-
tion mechanisms, and YOLOv8, highlighting the im-
pact of attention mechanisms on model accuracy over
epochs.
Figure 7: ROC Curve of YOLO11s employed with
Self Attention
The YOLO11s variants (with and without at-
tention) achieve slightly higher mAP values than
YOLO11n, indicating that the larger model lever-
ages its capacity to learn more intricate features ef-
fectively. Among all models, YOLO11s with at-
INCOFT 2025 - International Conference on Futuristic Technology
72
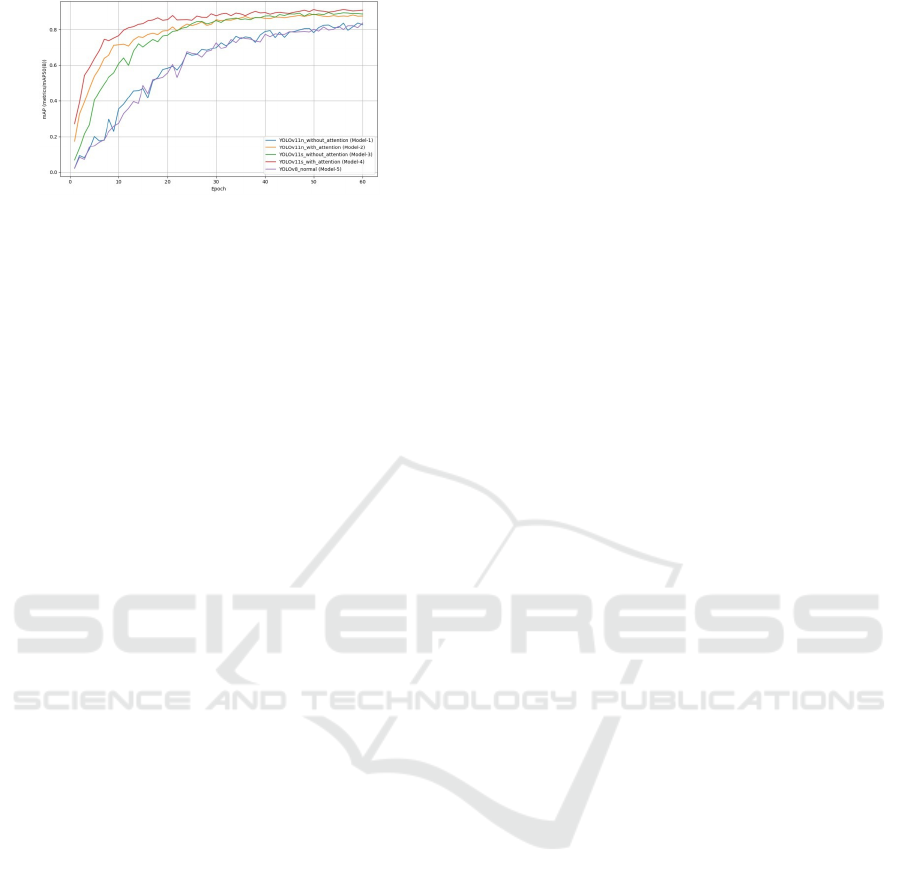
Figure 8: Comparison of mAP vs Epoch
tention converges the fastest, reaching higher mAP
within the initial 20 epochs and maintaining stabil-
ity after 40 epochs, showcasing its robustness. While
YOLOv8n achieves competitive performance, it is
outperformed by YOLO11 models with attention,
particularly YOLO11s with attention. This validates
the superiority of the YOLO11 architecture with inte-
grated attention mechanisms for enhanced traffic sign
detection.
5 CONCLUSION
The difficulty of real-time traffic sign detection and
recognition, which is essential for the secure and
effective operation of autonomous cars, is success-
fully addressed in this work, to sum up. In this
work YOLO11s employed with Pair-Wise Self At-
tention mechanism obtaining Precision 80.93% , Re-
call 81.81% ,achieving mAP@50 of 84.01% and
mAP@50-95 of 52.28% showcased ground break-
ing detection and classification results. The study
emphasizes how crucial it is to incorporate attention
strategies in order to improve detection performance
by using sophisticated YOLO models, both with and
without attentive mechanisms. Occlusions, changing
lighting, and broken signage are just a few examples
of the real-world difficulties that the models are re-
fined to handle through careful dataset preparation,
accurate annotation, and the application of reliable
training techniques. The results show that attention-
integrated models are suitable for real-time applica-
tions, since they perform noticeably better than their
counterparts in terms of recognition and detection ac-
curacy.By presenting a workable approach that im-
proves autonomous vehicle navigation and establishes
the foundation for future developments in the field,
this research advances the field of traffic sign identifi-
cation.
REFERENCES
Avramovi
´
c, A., Sluga, D., Tabernik, D., Sko
ˇ
caj, D., Stojni
´
c,
V., and Ilc, N. (2020). Neural-network-based traffic
sign detection and recognition in high-definition im-
ages using region focusing and parallelization. IEEE
Access, 8:189855–189868.
Boujemaa, K. S., Akallouch, M., Berrada, I., Fardousse, K.,
and Bouhoute, A. (2021). Attica: A dataset for ara-
bic text-based traffic panels detection. IEEE Access,
9:93937–93947.
Cao, X., Xu, Y., He, J., Liu, J., and Wang, Y. (2024).
A lightweight traffic sign detection method with
improved yolov7-tiny. IEEE Access, 12:105131–
105147.
Dewi, C., Chen, R.-C., Zhuang, Y.-C., and Manongga, W. E.
(2024). Image enhancement method utilizing yolo
models to recognize road markings at night. IEEE Ac-
cess, 12:131065–131081.
Fleyeh, H. and Dougherty, M. (2006). Road and traffic sign
detection and recognition.
Flores-Calero, M., Astudillo, C. A., Guevara, D., Maza, J.,
Lita, B. S., Defaz, B., Ante, J. S., Zabala-Blanco, D.,
and Armingol Moreno, J. M. (2024a). Traffic sign
detection and recognition using yolo object detection
algorithm: A systematic review. Mathematics, 12(2).
Flores-Calero, M., Astudillo, C. A., Guevara, D., Maza, J.,
Lita, B. S., Defaz, B., Ante, J. S., Zabala-Blanco, D.,
and Armingol Moreno, J. M. (2024b). Traffic sign
detection and recognition using yolo object detection
algorithm: A systematic review. Mathematics, 12(2).
Gao, Q., Hu, H., and Liu, W. (2024). Traffic sign detection
under adverse environmental conditions based on cnn.
IEEE Access, 12:117572–117580.
Greenhalgh, J. and Mirmehdi, M. (2015). Recognizing text-
based traffic signs. IEEE Transactions on Intelligent
Transportation Systems, 16(3):1360–1369.
Khalid, S., Shah, J. H., Sharif, M., Dahan, F., Saleem,
R., and Masood, A. (2024). A robust intelligent sys-
tem for text-based traffic signs detection and recogni-
tion in challenging weather conditions. IEEE Access,
12:78261–78274.
Lopez-Montiel, M., Orozco-Rosas, U., S
´
anchez-Adame,
M., Picos, K., and Ross, O. H. M. (2021). Evaluation
method of deep learning-based embedded systems
for traffic sign detection. IEEE Access, 9:101217–
101238.
Mahadshetti, R., Kim, J., and Um, T.-W. (2024). Sign-yolo:
Traffic sign detection using attention-based yolov7.
IEEE Access, 12:132689–132700.
Mannan, A., Javed, K., Ur Rehman, A., Babri, H. A., and
Noon, S. K. (2019). Classification of degraded traffic
signs using flexible mixture model and transfer learn-
ing. IEEE Access, 7:148800–148813.
Tabernik, D. and Sko
ˇ
caj, D. (2020). Deep learning for large-
scale traffic-sign detection and recognition. IEEE
Transactions on Intelligent Transportation Systems,
21(4):1427–1440.
Triki, N., Karray, M., and Ksantini, M. (2024). A compre-
hensive survey and analysis of traffic sign recognition
Smart Detection Systems for Traffic Sign Recognition: Pioneering Road Safety Solutions with YOLO Models
73

systems with hardware implementation. IEEE Access,
12:144069–144081.
Valiente, R., Chan, D., Perry, A., Lampkins, J., Strelnikoff,
S., Xu, J., and Ashari, A. E. (2023). Robust perception
and visual understanding of traffic signs in the wild.
IEEE Open Journal of Intelligent Transportation Sys-
tems, 4:611–625.
Wang, C., Wu, Y., Su, Z., and Chen, J. (2020). Joint self-
attention and scale-aggregation for self-calibrated de-
raining network. In Proceedings of the 28th ACM In-
ternational Conference on Multimedia, pages 2517–
2525.
Youssef, A., Albani, D., Nardi, D., and Bloisi, D. D. (2016).
Fast traffic sign recognition using color segmentation
and deep convolutional networks. In Blanc-Talon, J.,
Distante, C., Philips, W., Popescu, D., and Scheun-
ders, P., editors, Advanced Concepts for Intelligent Vi-
sion Systems, pages 205–216, Cham. Springer Inter-
national Publishing.
INCOFT 2025 - International Conference on Futuristic Technology
74
