
Sobel-Canny Fusion for Effective Edge Detection in Gaussian
Denoised Digital Images
Sahana R
1,2
, Manjula Gururaj Rao
3
and Ganesh Aithal
2
1
Dept. of CSE, NTTTE (Deemed to be University), NMAMIT, Nitte, Karkala, India
2
Dept. of CSE, SMVITM, Bantakal, India
3
NTTTE (Deemed to be University), NMAMIT, Nitte, Karkala, India
Keywords: Gaussian, PSNR, Time, Sobel and Canny.
Abstract: Information is essential in the digital age. These data may take the shape of pictures or statistics. Getting
high-quality photos is crucial when working with image data. Unwanted information in an image is
referred to as noise, and it presents a major difficulty for image analysis. Depending on the image format,
many types of noise may exist. Image noise removal is a difficult process. The suggested effort focusses
on removing noise from colored images, especially from video frames. To improve the quality of the
frames by lowering noise, the model uses Non-Local Means Denoising, Gaussian Filter, and Bilateral
Filter approaches. Time performance and PSNR (peak signal-to-noise ratio) measurements are used to
assess how effective the techniques are. The final photos had substantially higher PSNR values. One
important component of digital image/video processing is edge detection. Edge detection is essential for
applications that required to extract features or object information from a picture. Although there are
several different edge detection operators are available today, improving the performance of current
system remains a difficulty In this study, the Sobel and Canny edge detectors are combined in a hybrid
technique.
1 INTRODUCTION
Digital video is used in many applications like
medical, entertainment, information technology,
multimedia services etc. Both TV shows and movies
have switched to digital and high definition,
moreover now the majority of movies and certain
TV shows are in 3D format. Digital video unites the
movies, communication sector and computer,
making phone, cable TV and internet providers
bitter rivals. One device can function as phone, HD
TV and personal computer. These days we can use
mobile to record live video, a laptop to handle
digital data and printer to produce still image.
Enhancing the image quality is an ongoing area
of research. As low-end gadgets like mobile phones
and webcams proliferate, digital image and video
enhancements methods are increasingly needed to
improve their outputs. The main cause of image
quality degradation is noise. Thus, it is essential to
explore denoising algorithm to generate high quality
images and video frames. (Z. Liu,2014), ( M.
Maggioni,2012), (Mildenhall,2018) This paper
focuses on video denoising. Here the objective is to
develop high quality video denoising algorithm, that
successfully eliminate noise introduced by digital
cameras.
Low light, sensor flaws and thermal impacts are
the causes of noise in the images. It requires lot of
time and effort to manually adjust several
parameters in order to enhance the quality and
bandwidth of cameras. In real world scenario, where
color and light conditions may vary abruptly
creating a distinct noise distribution for every frame,
it is required to have noise reduction algorithm that
operates on blind settings. The majority of
conventional denoising techniques choose and
average the images pixels to provide good results.
The fundamental components of various denoising
techniques are how to efficiently choose appropriate
pixels and calculate the averaging weights. Filters
can be used to improve and reduce the noise in
images and video frames. (Antoni Buades, 2011) A
linear filter type based on gaussian function is called
gaussian filter. The bilateral filter is however non-
R, S., Gururaj Rao, M. and Aithal, G.
Sobel-Canny Fusion for Effective Edge Detection in Gaussian Denoised Digital Images.
DOI: 10.5220/0013608400004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 3, pages 41-48
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
41

linear filter type. It eliminates the noise while
maintaining the edge. Edge detection is essential for
applications that required to extract features or
object information from a picture. Although there
are several different edge detection operators are
available today, improving the performance of
current system remains a difficulty. In this study, the
Sobel and Canny edge detectors are combined in a
hybrid technique.
The section 2 focuses on the work done in the
removal of the noise from the images and proposed
work, implementation and the results are discussed
in the sections 3, 4 and 5 respectively
2 RELATED WORK
Denoising and edge detection of images and videos
has been researched for many years. Since
providing a comprehensive analysis is beyond the
scope of this paper, we will concentrate on
examining the work that is most relevant to ours.
Recently concept of image sparsity has been
introduced as image self-similarity, meaning that
patches within image exhibit similarities to each
other, which give rise to non-local methods
(Buades,2005). In NLM similar patches combined
with the weights that reflect with their similarities.
This straight forward approach yields high quality
outcomes. NLM techniques tests the images with
different noise levels. According to experimental
data this algorithm enhances the denoising
performances (Lingli Huang,2015). For this reason,
we have selected NLM as the one of the methods in
our denoising system.
One of the linear filters called gaussian filter
used to smooth and remove the noise from
images(M. G. Rao H,2019). Test and evaluation
report indicates that, it can be applied to enhance the
image quality (Sriani,2022) (Kumar,2020). The
gaussian filter approach is particularly useful for
filtering images with lot of noise, since filtering
finding shown a robust dependence on gaussian
kernel and relative independence on noise features
(Priyanka, 2020).
A nonlinear technique for denoising images
while maintaining the sharp edges is bilateral
filtering. The weighted sum of each pixels neighbors
in the input image determines its value in the output
image (P. D. Patil, 2015). It performs better than
linear filter like mean filter, weiner filter. In high
frequency area it performs better at eliminating the
noise, while in low frequency area it is ineffective
(Bhonsle,2012).
One important component of digital image/video
processing is edge detection. The performance of
each edge detection techniques is examined through
comparison. The findings demonstrated that in
contrast to Roberts and Prewitt operators, Sobel and
Canny edge detectors are less sensitive to random
noise in an image (Amer,2015) It is also suggested
to combine the canny and sobel operator for edge
detection (A. Kalra,2016).
In the proposed work focuses on the removal of
the noise using non local means denoising, Gaussian
filter and bilateral filtering. These algorithms are
compared and assessed using two kinds of metrics.
The PSNR and time performance are used as
evaluation metrics to determine the optimal filter to
reduce noise from frame under various conditions.
The Gaussian filter has been proven to be
superior in both the situations, however it does not
retain the edges for subsequent processing. To get
around this, hybrid approaches have been developed
to identify the edges in images while using the
Gaussian noise removal methods.
3 PROPOSED WORK
Three different methods have been implemented to
carry out denoising.
1. Non-Local Means Denoising
2. Gaussian Filter
3. Bilateral Filter
These methods perform denoising on each frame
and writes the denoised frames to an output video
3.1 Non-Local Means Denoising
The fundamental principle of Non local means
denoising is to substitute the average color of
neighboring pixels for pixel’s original color. In
probability theory, the variance law guarantees that
the noise standard deviation of an average of nine
pixels is divided by three. Therefore, one can split
the noise by three (and four with sixteen identical
pixels so on), if we can locate nine other pixels in
the image that are the same color as each pixel. To
identify all the pixels that actually resemble the pixel
needing denoising, it is acceptable to scan a large
area of the image. After that, denoising is
accomplished by calculating the average color of
these pixels that are most similar. Instead of
focusing only on color, the likeliness is assessed by
INCOFT 2025 - International Conference on Futuristic Technology
42
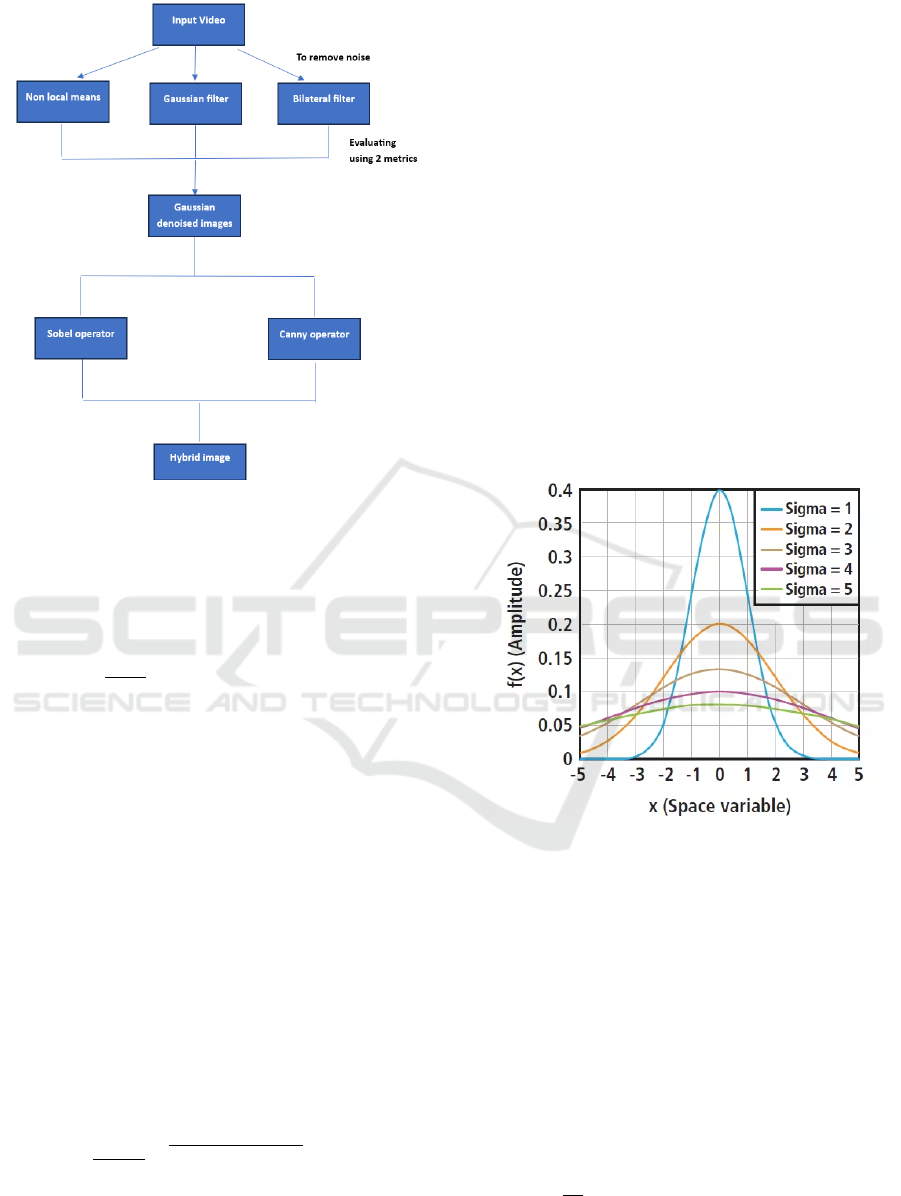
Figure 1: Proposed Algorithm.
analyzing the entire window surrounding each pixel.
We refer to this filter as non-local means
(Buades,2006) (Buades,2005) and it is given by
equation (1).
𝑁𝐿𝑢
(
𝑝
)
=
1
𝐶
(
𝑝
)
𝑓(𝑑𝐵
(
𝑝
)
,𝐵
(
𝑞
)
𝑢
(
𝑞
)
𝑑𝑞 (1)
The Euclidean distance between image centered
between p and q respectively is represented as
d(B(p), B(q)), f is a decreasing function, C(p) is the
normalizing factor.
3.2 Gaussian Filter
The most common form of noise in digital image
or video is Gaussian noise, while there are other
varieties as well such as impulse noise, speckle noise
and pepper noise. The gaussian noise in image/video
arises from sensor constraints’ during low light
conditions, which hinder the light sensor’s ability to
effectively record scene details. The bivariate
circular Gaussian function equation (2) can be used
mathematically to describe gaussian noise as follows
𝑔
(
𝑥,𝑦
)
=
𝑒
(
)
(
)
Where 𝜎
,
𝜎
are standard deviations and 𝜇
,𝜇
are the means.
In general, the output of the gaussian filter,
which uses the weighting function with a gaussian
distribution, is an average of the pixel values within
a specific neighborhood. This method involves
reducing the lot of high frequency noise such as
edges and small features to produce a smoother
image. The degree of smoothing function is
determined by Gaussian function standard deviation
or sigma
• Small sigma: They preserve more of the
surfaces and objects characteristics and
details since they have less smoothing
• Large sigma: A bit more smoothing, even
capable of erasing the key characteristics
Figure 2 depicts the relationship between
function value and standard deviation. Additionally
the function’s maximum value decreases as standard
deviation increases, other values deviating from
mean also increases (Gonzalez, 2007).
Figure 2: The graph shows variation in function value
according to the sigma value
3.3 Bilateral Filter
Bilateral filter is defined as weighted average of
adjacent pixels, much like gaussian filter. The
bilateral filter differs in that it preserves the edges
during smoothing by considering the difference in
value with neighbors. The fundamental principle of
this filter is that a pixel must have a similar value in
addition to occupying a nearby location, in order to
affect another pixel. The bilateral filter denoted by
BF[] is given by equation (3)
𝐵𝐹
𝐼
=
∑
𝐺
|
𝑝−𝑞
|
𝐺
𝐼
−𝐼
𝐼
(3)
Sobel-Canny Fusion for Effective Edge Detection in Gaussian Denoised Digital Images
43

Where normalization factor 𝑊
guarantees pixel
weights sum to 1.0
𝑊
=𝐺
|
𝑝−𝑞
|
𝐺
𝐼
−𝐼
(
4
)
The amount of filtering applied to the picture is
determined by 𝜎
𝑎𝑛𝑑 𝜎
. 𝐺
is a spatial gaussian
weighting and 𝐺
is a range gaussian.
Two parameters 𝜎
𝑎𝑛𝑑 𝜎
controls the bilateral
filter
• As the parameter 𝜎
increases, the bilateral
filter progressively approaches gaussian
filter more closely because 𝐺
flattens and
widens
• Larger features are smoothed by increasing
parameter 𝜎
For comparing between the above three algorithms,
we used two evaluation metrics.
i. The first metric is time. The time taken by
the whole program is calculated
ii. The second metric is PSNR. A standard
metric for assessing the quality of any video
or image is PSNR. In general, higher PSNR
denotes the higher quality reconstruction.
The formula given in below equation (5) is
used to determine the videos PSNR
𝑃𝑆𝑁𝑅 = 20log
𝑀𝐴𝑋
−10log
𝑀𝑆𝐸
(
5
)
MSE is mean squared error which is
calculated using below formula
𝑀𝑆𝐸 =
1
𝑚𝑛
𝐼
(
𝑖,𝑗
)
−𝐾
(
𝑖,𝑗
)
(
6
)
Where I is the original Image, K is the
denoised image, 𝑀𝐴𝑋
is the maximum
possible pixel value
It has been discovered that in both case Gaussian
filter outperform compared to other two algorithms.
Gaussian filter on the other hand do not maintain the
edge when eliminating noise. Gaussian denoising is
not ideal for further image or video processing as it
does not effectively preserve the edges. Hybrid
approaches have been put forth to improve edge
identification in gaussian denoised frame in order to
overcome this constraint. Specifically, combination
of Sobel and canny edge detection algorithms is
employed to accurately identify the edges while
mitigating the effects of gaussian noise.
One important component of digital image/video
processing is edge detection. Edge detection is
essential for applications that required to extract
features or object information from a picture. Edge
happens when the intensity functions abruptly
change or becomes discontinuous. Although there
are several different edge detection operators are
available today, improving the performance of
current system remains a difficulty. In this study, the
Sobel and Canny edge detector are combined in a
hybrid technique. Additionally, gaussian filter
eliminates noise from images and video when edge
identification is challenging by using it.
3.4 Sobel Edge Detector
The first order differential is the foundation of the
Sobel operator. This operation applies small,
separable integer valued filter to the image in both x
and y directions, making it computationally
inexpensive. It functions as an orthogonal gradient
operator, calculating the partial derivatives in both x
and y directions using 3x3 neighborhood of f(x,y)
(Moslem, 2011). The gradient in oblique direction is
given by equation (8)
𝑔
(
𝑥,𝑦
)
=
|
𝑆
|
+𝑆
(
7
)
𝑤ℎ𝑒𝑟𝑒 𝑆
=
{
𝑓
(
𝑥+1,𝑦−1
)
+2𝑓
(
𝑥+1,𝑦
)
+
𝑓
(
𝑥+1,𝑦+1
)
−{𝑓
(
𝑥−1,𝑦−1
)
+
2𝑓
(
𝑥−1,𝑦
)
+𝑓
(
𝑥+1,𝑦−1
)
(8)
𝑎𝑛𝑑 𝑆
=
{
𝑓
(
𝑥−1,𝑦+1
)
+2𝑓
(
𝑥,𝑦+1
)
+
𝑓
(
𝑥+1,𝑦+1
)
−{𝑓
(
𝑥−1,𝑦−1
)
+
2𝑓
(
𝑥,𝑦−1
)
+𝑓(𝑥−1,𝑦+1) (9)
Sobel edge detection has 2 benefits.
i) It smooths out some of the undesired
noise in a picture.
ii) By using differential of two rows and two
columns, edge’s element are strengthened,
making it thicker and brighter
3.5 Canny Edge Detector
A multi stage technique for identifying the different
edges in images or videos is called as canny edge
detector. Due its excellence performance, it is
sometimes referred as ideal edge detector. The core
concept of canny operator is to get the derivatives of
the first order of a gaussian function in any direction
to serve as a noise filter(Cai-Xia Deng, 2013). This
filter can be used to find the greatest value of the
INCOFT 2025 - International Conference on Futuristic Technology
44

local gradient. As a result, image edge can be
identified.
3.6 Proposed Algorithm
The accuracy of edge detection and efficient noise
reduction is the focus of this research. A gaussian
filter, which effectively removes noise has been
implemented for effective noise removal. The
benefits of each technique are combined in this
hybrid algorithm. The suggested approach as shown
in Figure 1 seeks to address the drawback of both
denoised gaussian image and the current edge
detection methods, Sobel and canny.
Step 1: Take any video as input, and if necessary,
add noise to it.
Step 2: To eliminate the noise from the video, apply
bilateral, gaussian and non-local filters.
Step 3: Use the PSNR and time as the two
evaluation measures to determine which method
performs the best.
Step 4: Apply the sober edge detector first to the
image and record the result as SE
Step 5: Next use the canny edge detector to examine
image and save the result as CE
Step 6: Create a hybrid of two outcomes as in
equation (10)
𝐻𝑦𝑏𝑟𝑖𝑑𝑖𝑚𝑎𝑔𝑒 = 𝑆𝐸+ 𝐶𝐸
(
10
)
4 RESULTS AND DISCUSSIONS
Three approaches have been utilized for denoising,
non local means denoising, gaussian filter and
bilateral filter. Videos of varying length have been
used as input for these algorithms. The original
image and outcome of the non-local means
denoising is compared in Figure 3(a), Figure 3(b)
contrasts the original image with gaussian filter,
Figure 3(c) compares the original image with
bilateral filter.
These algorithms have been evaluated using two
metrics: execution time and PSNR. We analyzed
videos of various lengths and execution time of all
three methods were recorded as shown in Table 1.
The bar graph in Fig 4 illustrates the same. Results
indicates that the Gaussian filter consistently
outperforms the other two algorithms across all
(a) Original Image Vs Non Local Means denoising
(b) Original Image Vs Gaussian Filter
(c) Original Image Vs Bilateral Filter
Figure 3: Output of three different algorithms
videos. Additionally, it was observed that for videos
longer than two hours, non-local means denoising
requires over 24hrs to complete
Sobel-Canny Fusion for Effective Edge Detection in Gaussian Denoised Digital Images
45
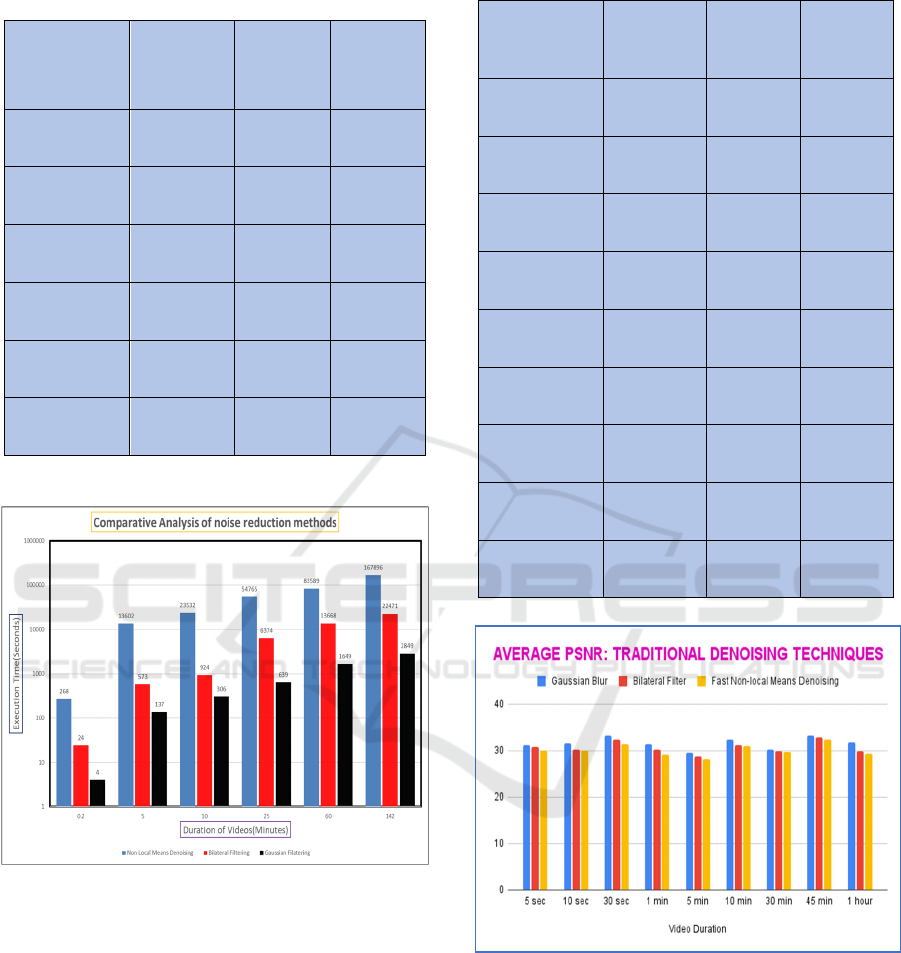
Table 1: Comparison of three methods using execution
time
Video
Duration(min)
Non Local
Means(sec)
Gaussian
Filter(sec)
Bilateral
Filter(sec)
0.2 268 4 24
5 13602 137 573
10 23532 306 924
25 54765 639 6374
60 83589 1649 13668
142 167896 2849 22471
Figure 4: Comparative analysis of noise reduction
methods using Execution Time
In a similar manner, we have assessed the three
approaches using PSNR metrics, which evaluate the
video quality. Videos of various lengths were
analyzed and PSNR values for each of the three
methods are shown in Table2. The bar graph in Fig.
5 reflects the same information. It was observed that
using second metric PSNR, Gaussian filter surpasses
the other two techniques.
Table 2: Comparison of three methods using PSNR
Video
Duration(min)
Non Local
Means(dB)
Gaussian
Filter(dB)
Bilateral
Filter(dB)
5sec 30.15 31.22 30.85
10sec 30.07 31.49 30.31
30sec 31.44 33.31 32.28
1min 29.04 31.45 30.29
5min 28.11 29.44 28.67
10min 31.02 32.33 31.13
30min 29.65 30.19 29.89
45min 32.25 33.27 32.81
1 hour 29.32 31.69 29.81
Figure 5: Comparative analysis of noise reduction
methods using PSNR
The original image is displayed in Fig. 6(a). This
image is smoothed and the noise id removed when
gaussian filter in applied. After filtering smoothed
image is displayed in Fig. 6 (b). Edge detection is
more successful after filtering. The image after
applying the Sobel operator is displayed in Fig. 6(c).
It is evident that certain elements have been masked
by the image’s edges. The outcome of applying the
INCOFT 2025 - International Conference on Futuristic Technology
46

canny operator is displayed in Fig. 6(d). As the
canny operator exhibits the lower sensitivity to noise
than Sobel operator, it is evident that the edges are
clearer. However, some edges are taken up by the
Sobel operator rather than canny operator. In this
situation, hybrid strategy aids in producing the
effective outcomes. The algorithm’s final output is
depicted in Fig. 6(e). It incorporates the benefits of
the three elements.
Figure 6: Original Image and gaussian denoised image
Figure 7: Sobel edge detection and Canny edge detection
Figure 8: Proposed algorithms Hybrid image
5 CONCLUSION AND FUTURE
WORK
An essential stage in object extraction is edge
detection. An image uses less storage space when
edge detection is used. Edge detection is frequently
used for image segmentation since it can identify
objects and boundaries. Additionally edge detection
aids in identifying the patterns in an image by
extracting the key features. Hence it is essential to
obtain high quality outcomes from edge detection
methods. Individual operators cannot detect every
edge on their own, this paper proposed a hybrid
technique that leverages the benefits of both Sobel
and Canny Edge detection algorithms. Additionally,
the proposed algorithm incorporates a gaussian
filtering to eliminate any noise and to enhance edge
detection accuracy. The input image is smoothed
using this gaussian filtering. Additionally, this
gaussian filtering outperforms the other two
techniques. The suggested algorithm achieves a very
good edge detection effect and successfully
increases edge detection accuracy.
Various deep learning technique can be used to
perform this operation. The proposed algorithm is
suitable for short videos. However, as the video
duration increases, processing becomes significantly
time consuming. To address this, parallel processing
techniques can be utilized by distributing the
workload across multiple threads, thereby enhancing
the efficiency.
REFERENCES
Z. Liu, L. Yuan, X. Tang, M. Uyttendaele, and J. Sun
2014. Fast burst images denoising. ACM Transactions
on Graphics (TOG), 33:232.
M. Maggioni, G. Boracchi, A. Foi, and K. Egiazarian
2012. Video denoising, deblocking, and enhancement
through separable 4-d nonlocal spatiotemporal
transforms. TIP, 21:3952–3966
Mildenhall, J. T. Barron, J. Chen, D. Sharlet, R. Ng, and
R. Carroll 2018. Burst denoising with kernel
prediction networks. In CVPR
Antoni Buades, Bartomeu Coll, Jean-Michel Morel , Non-
Local Means Denoising, Image Processing On Line,
2011, pp. 208212.
https://doi.org/10.5201/ipol.2011.bcm nlm
Buades, B. Coll, J.M. Morel 2005, “A non local algorithm
for image denoising”, IEEE ComputerVision and
Pattern Recognition, Vol 2, pp: 60-65.
http://dx.doi.org/10.1109/CVPR.2005.38
Sobel-Canny Fusion for Effective Edge Detection in Gaussian Denoised Digital Images
47

Lingli Huang 2015, “Improved Non-Local Means
Algorithm for Image Denoising", Journal of Computer
and Communications, Vol.3 No.4
Sriani, Ilka Zufria, Mhd. Syahnan 2022, “Improved
Digital Image Quality Using the Gaussian Filter
Method”, International Journal of Information System
& Technology, Vol. 5, No. 5, pp. 556-563
Kumar and S. S. Sodhi 2020, "Comparative Analysis of
Gaussian Filter, Median Filter and Denoise
Autoenocoder," 27th International Conference on
Computing for Sustainable Global Development
(INDIACom), New Delhi, India, pp. 45-51, doi:
10.23919/INDIACom49435.2020.9083712
Priyanka, Rishabh Shukla, Laxmi Shrivastava 2020,”
Image Restoration of Image with Gaussian Filter”,
International Research Journal of Engineering and
Technology (IRJET) e-ISSN: 2395-0056, Volume: 07
Issue: 12
P. D. Patil and A. D. Kumbhar, "Bilateral Filter for Image
Denoising 2015. International Conference on Green
Computing and Internet of Things (ICGCIoT), Greater
Noida, India, pp. 299-302, doi:
10.1109/ICGCIoT.2015.7380477.
Bhonsle, Devanand & Chandra, Vivek & Sinha, Professor
G 2012. Medical Image Denoising Using Bilateral
Filter. International Journal of Image, Graphics and
Signal Processing. 4. 10.5815/ijigsp.2012.06.06.
Ghassan Mahmoud husien Amer and Dr. Ahmed
Mohamed Abushaala 2015, “Edge Detection
Methods”, IEEE.
A. Kalra and R. L. Chhokar 2016, "A Hybrid Approach
Using Sobel and Canny Operator for Digital Image
Edge Detection," International Conference on Micro-
Electronics and Telecommunication Engineering
(ICMETE), Ghaziabad, India, pp. 305-310, doi:
10.1109/ICMETE.2016.49.
Buades, B. Coll, J.M. Morel 2006, “A review of image
denoising methods, with a new one”, Mul-tiscale
Modeling and Simulation, Vol. 4 (2), pp: 490-530
http://dx.doi.org/10.1137/040616024
Buades, B. Coll, J.M. Morel 2005, “A non local algorithm
for image denoising”, IEEE ComputerVision and
Pattern Recognition, Vol 2, pp: 60-65,
http://dx.doi.org/10.1109/CVPR.2005.38
Gonzalez, R. C., and Richard, E. W. 2007, Image
processing. Digital image processing 2
Moslem Taghizadeh and Mahboobeh Hajipoor 2011, “A
Hybrid Algorithm for Segmentation of MRI Images
Based on Edge Detection”, International Conference
of Soft Computing and Pattern Recognition, pp. 107-
111
Cai-Xia Deng, Gui-Bin Wang and Xin-Rui Yang 2013,
“Image Edge Detection algorithm based on Improved
Canny Operator”, International Conference on
Wavelet Analysis and Pattern Recognition, pp. 168-
172.
M. G. Rao H. and G. S. Nagaraja 2019, "Noise Removal
Techniques and Quality analysis of X-ray Images," 1st
International Conference on Advanced Technologies
in Intelligent Control, Environment, Computing &
Communication Engineering (ICATIECE), Bangalore,
India, pp. 327-330, doi:
10.1109/ICATIECE45860.2019.9063843.
INCOFT 2025 - International Conference on Futuristic Technology
48
