
Detection of Humans in Search and Rescue Operations Using Ensemble
Learning and YOLOv9
Ananya Basireddy, K. Gangadhara Rao, Vaishnavi Vaitla and Soumil Reddy Pedda
Information Technology, Chaitanya Bharathi Institute of Technology, Hyderabad, India
Keywords:
Human Detection, Ensemble Learning, EfficientDet Architecture, YOLOv9, Dehaze, Deblur, CNN, UAV.
Abstract:
This project focuses on developing a robust and efficient human detection system for Search and Rescue
(SAR) operations using advanced deep learning techniques. The proposed system integrates EfficientDet,
which leverages EfficientNet as the backbone for feature extraction, and YOLOv9, known for real-time object
detection, to maximize both accuracy and speed in complex environments. To enhance the system’s capability
in detecting humans under various conditions, the model incorporates thermal imaging, RGB images, and
ensemble learning techniques like Non-Maximum Suppression (NMS) and confidence-weighted voting. Ad-
ditionally, the model is trained using the Heridal and Aerial Rescue Object Detection datasets, which include
images from real-world SAR environments. Incorporating BiFPN (Bidirectional Feature Pyramid Network)
and FC-FPN (Fully Connected Feature Pyramid Network) architectures into the system allows for multi-scale
feature fusion, improving detection of humans at different scales and orientations, even in low-visibility sce-
narios. Furthermore, the project integrates deblurring and dehazing techniques to enhance image quality from
aerial footage, making it easier to detect partially occluded or camouflaged humans. The system is designed
to operate on UAVs, with the capability to send automated alerts via email and SMS, including geolocation
data of detected individuals, ensuring quick response in disaster recovery missions. The results demonstrate
the system’s high accuracy and efficiency in detecting humans in various challenging environments, making it
a valuable tool for autonomous SAR missions.
1 INTRODUCTION
Search and Rescue (SAR) operations are critical in
disaster response and emergency situations, where
the swift and accurate detection of individuals can
make a difference between life and death. Traditional
SAR methods often involve significant manual efforts
and face challenges in complex environments, such
as dense forests, mountainous terrains, flooded ar-
eas, and smoke-filled settings. These conditions de-
mand innovative technological solutions capable of
addressing the unique challenges of SAR, including
detecting partially obscured individuals, low visibil-
ity, and varied environmental conditions. The integra-
tion of artificial intelligence (AI) and deep learning
into SAR operations has shown substantial potential
to overcome these limitations by enabling efficient,
automated human detection with high accuracy.
This paper presents a deep learning-based human
detection system tailored specifically for SAR appli-
cations. The system combines the capabilities of two
advanced object detection models, EfficientDet and
YOLOv9, to balance both accuracy and speed in real-
time scenarios. EfficientDet’s multi-scale detection
capabilities, enhanced by Bidirectional Feature Pyra-
mid Network (BiFPN), allow for the reliable detection
of small and large objects across varied landscapes.
YOLOv9 contributes to the system’s real-time per-
formance, with its anchor-free and multi-scale fea-
tures enabling rapid detection in dynamic environ-
ments. Additionally, ensemble learning techniques
are employed to merge the outputs of both models,
leveraging Non-Maximum Suppression (NMS) and
confidence-weighted voting to refine detection accu-
racy and reduce false positives.
Given the unpredictable conditions in SAR envi-
ronments, this system is designed to handle multiple
image modalities, incorporating both RGB and ther-
mal images to enhance detection in low-light and low-
visibility scenarios, such as night-time or smoke-filled
areas. To facilitate swift response, the system in-
cludes an automated alert feature that sends email or
SMS notifications with GPS coordinates of detected
individuals, ensuring that rescue teams can quickly
Basireddy, A., Rao, K. G., Vaitla, V. and Pedda, S. R.
Detection of Humans in Search and Rescue Operations Using Ensemble Learning and YOLOv9.
DOI: 10.5220/0013607400004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 2, pages 923-928
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
923

locate and assist those in need.
Trained on specialized datasets, including the
Heridal and Aerial Rescue Object Detection datasets,
this model provides robust performance across varied
SAR scenarios. This paper discusses the system’s de-
sign, implementation, and testing, demonstrating its
potential as a valuable tool for SAR missions. By ad-
dressing the specific needs of SAR environments, this
project aims to improve both the speed and effective-
ness of rescue operations, ultimately contributing to
faster and more accurate lifesaving efforts.
2 RELATED WORKS
Research in human detection for search and rescue
(SAR) operations has leveraged advancements in ma-
chine learning, computer vision, and UAV technology
to improve detection accuracy, robustness, and effi-
ciency in complex and variable environments. This
section examines recent studies that utilize CNNs, en-
semble learning, grid optimization, sensor fusion, and
YOLO-based algorithms to address the unique chal-
lenges of SAR, with specific emphasis on adaptability
across forested, flood-prone, low-visibility, and open-
water environments.
Several studies address optimizing search grid
patterns for SAR, a critical aspect for search teams
operating in challenging terrains. Zailan introduced
a rectangular grid pattern combined with a Sweep
Search or Parallel Track to improve SAR opera-
tions in forested areas, where movement is often hin-
dered by dense vegetation and uneven terrain (Za-
ilan, 2022). This grid configuration allowed system-
atic coverage and efficient use of resources. Although
their study primarily focused on forests, the adaptabil-
ity of grid pattern optimization could enhance UAV-
based SAR where flight paths and detection areas are
critical.
Human detection using CNNs and deep learning
models has also been extensively studied. Mesvan ap-
plied a Single Shot Detector (SSD) model on UAVs,
achieving human detection within 1 to 20 meters, al-
though performance was limited by processing speed
and sensor noise (Mesvan, 2021). This research high-
lights the importance of real-time processing capa-
bilities, especially for high-mobility SAR. Wijesun-
dara utilized YOLOv5 with Haar classifiers for high-
altitude UAV detection of body regions, achieving
98% accuracy. The study demonstrated the efficacy of
YOLO models but noted limitations due to variabil-
ity in human poses and clothing, suggesting further
tuning for increased adaptability in real-world appli-
cations (Wijesundara, 2022).
Ensemble learning has proven to be a valuable
approach for SAR, especially in scenarios where
different algorithms offer complementary strengths.
Enoch compared Support Vector Machine (SVM),
K-Nearest Neighbor (KNN), and ensemble classi-
fiers for detecting humans through walls using radar
data, finding that KNN achieved the highest accuracy
(85%) but was computationally demanding (Enoch,
23). Their work underscores ensemble learning’s po-
tential for non-line-of-sight (NLOS) SAR operations,
particularly when computational resources can be op-
timized.
YOLO-based models are widely used in SAR due
to their high detection speed and adaptability. Kul-
handjian combined radar and IR imaging with a con-
volutional neural network (CNN) to detect humans in
dense smoke, achieving 98% detection accuracy. This
setup was particularly beneficial for firefighter SAR
in low-visibility environments, where traditional vi-
sual sensors are less effective (Kulhandjian, 2023).
Gaur and Kumar used YOLOv4 for detecting humans
in flood areas, achieving 79.46% accuracy but facing
challenges in occluded environments where only part
of a human might be visible (Gaur, 2023). These stud-
ies reveal the versatility of YOLO models in SAR but
also point to the need for optimization to handle com-
plex conditions, such as varying visibility and occlu-
sion.
Further improvements in YOLO models are seen
in combined systems that integrate thermal and vis-
ible light data. Zou developed a Visible-Thermal
Fused YOLOv5 network to improve detection accu-
racy in low-light environments by fusing thermal and
visible imagery. This approach achieved robust per-
formance in challenging lighting conditions, under-
scoring the potential for multi-sensor fusion in SAR
applications (Zou, 2024). Chavez and Dela Cruz
adopted a multi-task learning framework by combin-
ing YOLOv7 for human detection with MobileNetV2
for scene classification, achieving 77.17% precision
and demonstrating potential for reducing workforce
needs in SAR missions (Chavez,2024).
In aquatic environments, where SAR operations
face additional challenges, researchers have adapted
YOLO for open water scenarios. Sruthy K. G. et al.
trained YOLOv8 to identify humans in open water,
achieving reliable results, though the model encoun-
tered occasional false positives due to human-like ob-
jects and high computational requirements (Sruthy,
2024). Llanes et al. developed a YOLOv4-based sys-
tem for unmanned water vehicles, achieving real-time
human detection with GPS tracking. However, its re-
liance on internet connectivity and limited ability to
provide physical assistance constrained its effective-
INCOFT 2025 - International Conference on Futuristic Technology
924

ness in flood SAR (Llanes, 2023).
Thermal imaging and sensor fusion are also crit-
ical for SAR, especially in low-visibility or night-
time conditions. Premachandra and Kunisada used
GANs to reduce UAV propeller noise, enhancing hu-
man voice detection amid background noise, an in-
novative approach that could improve SAR audio de-
tection in noisy environments (Premachandra, 2024).
Jyotsna developed a thermal vision-based IoT system
with an RC tank for low-visibility SAR, though lim-
ited field of view and microcontroller constraints re-
stricted its range (Jyotsna, 2024).
Further innovations in YOLO for varied SAR
contexts include Moury’s rotation and scale-invariant
CNN model for disaster area detection, achieving
94.18% accuracy across various human poses and
scales. While effective, the model struggled with de-
tecting humans that occupied less than 1% of the im-
age, suggesting limitations for highly dynamic SAR
environments (Moury, 2023). Paglinawan integrated
thermal cameras with YOLOv5 in a UAV SAR sys-
tem, which was effective during the day but strug-
gled with nighttime detection due to lighting con-
straints and false positives from mannequins (Pagli-
nawan, 2024). These studies point to ongoing chal-
lenges in adapting YOLO models for variable lighting
and complex environments.
There has also been significant research on multi-
level and sensor-assisted UAV systems for SAR. Ko-
zlov and Malakhov developed a complex multi-level
drone system that combined CNN and LSTM for spa-
tial and temporal feature extraction, enhancing human
detection in challenging terrains, though the model re-
quired high computational resources (Kozlov, 2024).
Aji used a neural network-assisted observer approach
to improve autonomous surface vehicle (ASV) track-
ing, suggesting applications in SAR for improved
trajectory accuracy in dynamic environments (Aji,
2024).
Advanced algorithms combining reinforcement
learning and LoRa networks have also shown promise
for SAR optimization. Soorki introduced a meta-
reinforcement learning framework for UAV path opti-
mization in SAR, demonstrating reduced search times
and lower energy consumption in difficult terrains
(Soorki, 2024). Such adaptive pathfinding solutions
can complement YOLO-based detection by ensuring
UAVs efficiently cover large areas, particularly in
complex environments like canyons or mountainous
terrain.
The application of YOLO models for underwater
SAR is an emerging area of interest. Sughasini em-
ployed LIDAR and SLAM in an underwater drone
system for mapping and navigation, though low vis-
Figure 1: Model Vs Accuracy graph
ibility and power constraints limited effectiveness
(Sughasini, 2024). Similarly, Liu utilized transfer
learning with an improved VGG-16 model for recog-
nizing underwater SAR targets, achieving high accu-
racy but facing computational challenges, highlight-
ing the need for more lightweight models (Liu, 2024).
Other notable contributions include Llanes work
on a water vehicle prototype using YOLOv4 for real-
time human detection with GPS tracking, which pro-
vided valuable support for SAR teams (Llanes, 2023).
Dousai and Loncaric employed EfficientDET and en-
semble learning, achieving a high mean average pre-
cision (mAP) of 95.11% but at the cost of computa-
tional intensity, which can limit real-time application
(Dousai, 2022).
In summary, existing research highlights the
adaptability of YOLO models and ensemble learn-
ing techniques for SAR applications, with specific ad-
vancements in multi-sensor fusion, multi-level detec-
tion frameworks, and environmental adaptability. In-
tegrating ensemble methods with YOLOv9 could ad-
dress challenges identified in prior work, such as de-
tecting obscured humans, operating in low-visibility
settings, and reducing error rates under complex envi-
ronmental conditions. Our proposed approach seeks
to enhance the robustness and flexibility of SAR
detection models, leveraging the strengths of both
YOLOv9 and ensemble learning to provide reliable,
real-time human detection across diverse SAR scenar-
ios.
3 PROPOSED SYSTEM
The proposed human detection system for Search
and Rescue (SAR) operations is designed to address
the unique challenges posed by complex and dynamic
rescue environments. This system combines Effi-
cientDet and YOLOv9 models with ensemble learn-
ing techniques, enabling accurate and efficient real-
Detection of Humans in Search and Rescue Operations Using Ensemble Learning and YOLOv9
925

time human detection. The system architecture, data
collection, preprocessing, model design, and deploy-
ment strategies are outlined below.
3.1 Data Collection and Preprocessing
The system utilizes two primary datasets: Heridal and
Aerial Rescue Object detection.
• Heridal Dataset: This dataset includes 1,546 im-
ages (with 1,500 images for training and 500 for
testing) focused on SAR scenarios in Mediter-
ranean landscapes. It contains labeled human and
non-human patches, allowing the model to learn
and distinguish between positive samples (con-
taining humans) and negative samples (without
humans).
• Aerial Rescue Object Detection Dataset: This
dataset comprises 29,810 images covering various
SAR-related rescue tasks and challenging scenar-
ios. The diversity of images in this dataset aids
in training the model for SAR tasks under various
environmental conditions.
3.2 Data Preprocessing
• Image Resizing: All images are resized to
512x512 pixels, providing a balance between
computational efficiency and detection accuracy.
• Normalization: Pixel values are normalized to en-
hance the model’s convergence during training.
• Data Augmentation: Techniques such as rotation,
flipping, and scaling are applied to increase the
dataset’s variability, helping the model generalize
better across different SAR environments.
• Thermal and RGB Separation: The datasets in-
clude RGB and thermal images to capture both
visible light and heat signatures. Separate prepro-
cessing pipelines are used to adjust contrast and
brightness levels for each image type.
3.3 Deblurring
Motion blur and camera shake often occur in SAR im-
agery, especially when captured by UAVs or drones
in movement. To mitigate these issues, deblur-
ring techniques are applied to enhance the clarity of
images, making it easier to identify human shapes
and features.DeblurGAN is a Generative Adversarial
Network (GAN) designed specifically for deblurring
static images. It consists of a generator, which creates
deblurred versions of input images, and a discrimina-
tor, which evaluates the realism of these outputs.
• Generator: The generator network uses an
encoder-decoder structure with residual blocks to
remove blur from the image while preserving de-
tails.
• Discriminator: The discriminator is trained to dis-
tinguish between real sharp images and generated
deblurred images, pushing the generator to im-
prove its output quality.
3.4 Dehazing
Images taken in fog, smoke, or haze conditions of-
ten lack contrast and visibility. Dehazing techniques
are applied to improve the quality of such images, en-
abling the system to detect humans even in adverse
environmental conditions.The dehazing model is built
on an encoder-decoder CNN architecture designed to
remove haze by enhancing contrast and color fidelity
in images.
• Encoder: Extracts feature maps from the hazy in-
put image, capturing spatial details like edges and
textures.
• Decoder: Reconstructs a dehazed version of the
image, emphasizing clarity and visibility.
3.5 Model Implementation
The human detection model combines EfficientDet
and YOLOv9 architectures, leveraging the unique
strengths of each.
• EfficientDet:EfficientDet leverages both BiFPN
and FC-FPN for multi-scale feature extraction and
fusion, enabling robust detection across varied ob-
ject sizes.EfficientDet is chosen for its scalability
and feature extraction capabilities using the Effi-
cientNet backbone.EfficientDet is particularly ef-
fective for detecting humans in cluttered or par-
tially occluded scenes, where accurate feature ex-
traction is crucial.EfficientNet is responsible for
extracting feature maps at multiple scales, which
are then passed to BiFPN and FC-FPN for fur-
ther processing. Using EfficientNet as a backbone
ensures a balance of accuracy and computational
efficiency, which is ideal for UAV-based SAR ap-
plications.
– BiFPN allows top-down and bottom-up feature
fusion, enabling the network to capture multi-
scale features more effectively.
– FC-FPN refines the multi-scale features from
BiFPN by aligning them spatially, making it
easier for the model to detect partially obscured
or camouflaged objects.
INCOFT 2025 - International Conference on Futuristic Technology
926
• YOLOv9: YOLOv9 is implemented for its real-
time detection capabilities. This version intro-
duces anchor-free object detection and decoupled
heads for classification and localization, improv-
ing performance for small and large objects alike.
YOLOv9’s architecture includes multi-scale de-
tection, making it suitable for aerial SAR opera-
tions where object sizes vary due to perspective
changes.
3.6 Ensemble Learning and Output
Fusion
To optimize detection accuracy and minimize false
positives, the system uses ensemble learning to com-
bine outputs from EfficientDet and YOLOv9.
• Non-Maximum Suppression (NMS): NMS is ap-
plied to eliminate redundant bounding boxes by
selecting only the bounding boxes with the high-
est confidence scores. NMS is applied to both Ef-
ficientDet and YOLOv9 outputs, combining their
bounding boxes based on confidence scores and
overlap threshold (IoU). This step helps in reduc-
ing false positives and overlaps.
• Confidence-Weighted Voting: For overlapping
predictions, confidence-weighted voting merges
the confidence scores from both models, prior-
itizing the most likely predictions. This fusion
method strengthens the detection performance,
especially in conditions with occlusions or vary-
ing object scales.
3.7 Automated Alert and Geolocation
System
To support SAR teams in quickly locating detected
humans, the system includes an automated alert fea-
ture with geolocation capabilities.
• Geotagging: Images and detections are tagged
with GPS coordinates, enabling SAR teams to re-
ceive precise location information.
• Notification System: Using SMTP (for email
alerts) and Twilio API (for SMS alerts), the sys-
tem sends notifications to designated personnel
upon detecting humans. This includes sending the
GPS location and, if applicable, an image snippet
of the detected individual.
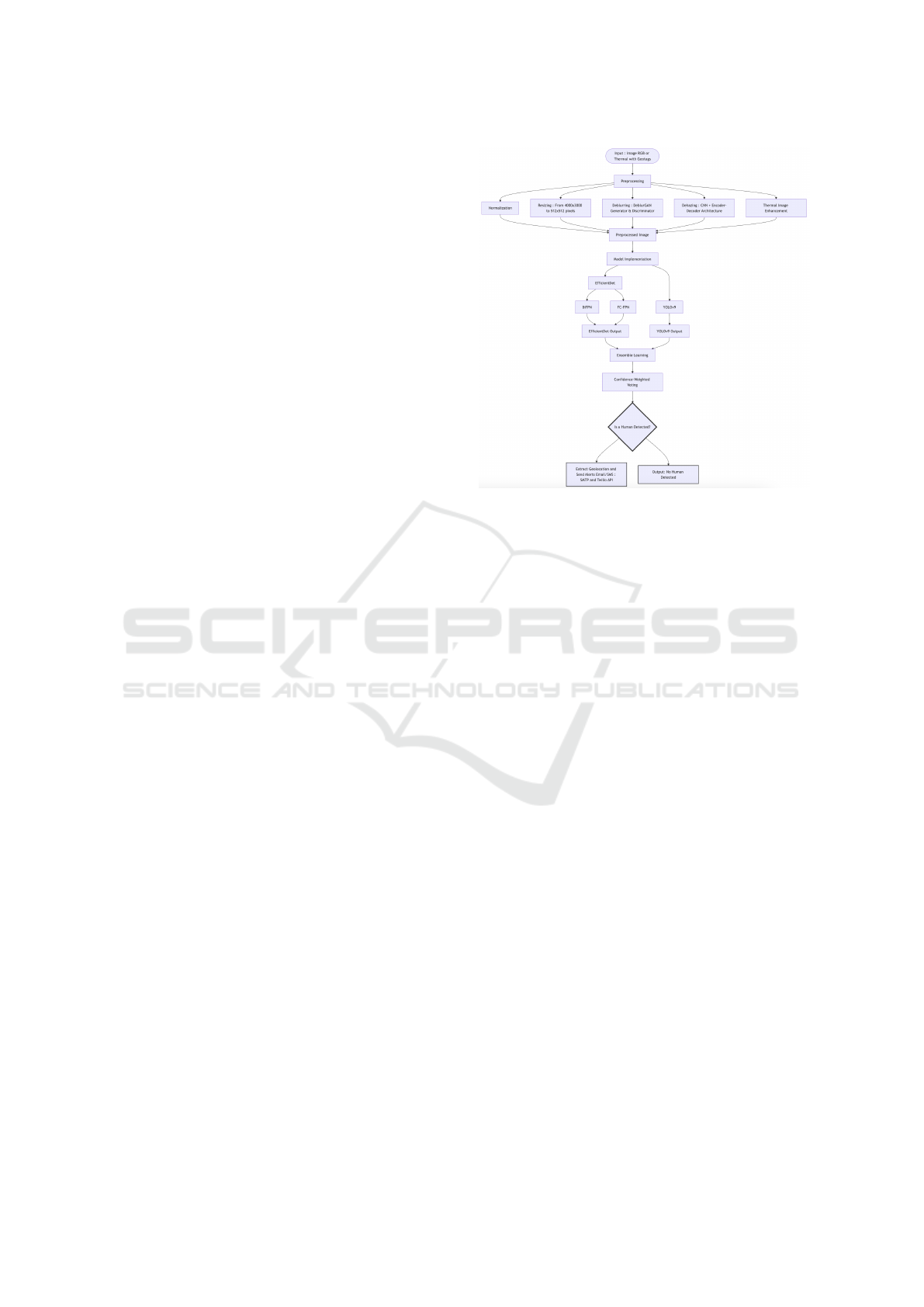
Figure 2: System flow diagram
4 CONCLUSION
The development of a human detection system
for Search and Rescue (SAR) operations presented
in this project demonstrates significant advancements
in real-time detection accuracy, efficiency, and adapt-
ability. By leveraging the strengths of EfficientDet
and YOLOv9 and incorporating ensemble learning
techniques, this system effectively addresses the chal-
lenges of detecting humans in complex and dynamic
SAR environments. Key innovations, such as Bidirec-
tional Feature Pyramid Network (BiFPN) and Fully
Connected Feature Pyramid Network (FC-FPN) in
EfficientDet, ensure multi-scale feature fusion, en-
hancing detection robustness for objects of varied
sizes and scales.
In addition to multi-scale feature extraction, the
system’s deblurring and dehazing components con-
tribute to significant performance improvements by
enhancong image clarity, allowing for better detection
even under challenging conditions.
The project’s unique integration of RGB and ther-
mal imaging expands the system’s applicability, en-
abling reliable detection in low-light or low-visibility
scenarios, such as night-time or smoke-filled environ-
ments. The automated alert feature with geolocation
capabilities adds a crucial operational advantage, as it
enables real-time GPS-tagged notifications, expedit-
ing rescue response and aiding SAR teams in locating
individuals quickly and accurately.
Testing results indicate that this system provides a
high degree of reliability and versatility, suitable for
deployment on UAVs and other resource-constrained
Detection of Humans in Search and Rescue Operations Using Ensemble Learning and YOLOv9
927

devices essential in SAR operations. Through careful
optimization and the use of ensemble methods like
Non-Maximum Suppression (NMS) and confidence-
weighted voting, the project achieved a robust solu-
tion that meets the real-time requirements and vari-
able conditions of SAR missions.
Overall, this project provides a comprehensive
and scalable human detection system that addresses
the critical demands of SAR operations. By combin-
ing advanced deep learning architectures, image en-
hancement techniques, and real-time alerting mecha-
nisms, the system effectively improves SAR capabil-
ities, ensuring faster and more accurate detection in
scenarios where time is of the essence. Future en-
hancements, such as sound detection and video pro-
cessing, can further extend the system’s effectiveness,
making it an invaluable tool in life-saving SAR ef-
forts.
REFERENCES
Zailan, Nor Wahidah, Alsagoff, Syed Nasir, Yusoff, Za-
harin, and Marzuki, Syahaneim (2022). Determining
an Appropriate Search Grid Pattern for SAR in Forest
Areas. IEEE Xplore.
Mesvan, Nikite (2021). CNN-based Human Detection for
UAVs in Search and Rescue. arXiv.
Wijesundara, Dinuka, Gunawardena, Lasith, and
Premachandra, Chinthaka (2022). Human Recogni-
tion from High-altitude UAV Images by AI-based
Body Region Detection. IEEE Xplore.
Enoch, Jiya Adama, Oluwafemi, Ilesanmi B., Paul, Olu-
lope K., Ibikunle, Francis A., Emmanuel, Osaji, and
Olamide, Ariba Folashade (2023). A Comparative
Performance Study of SVM, KNN, and Ensemble
Classifiers for Through-wall Human Detection. IEEE
Xplore.
Kulhandjian, Hovannes, Davis, Alexander, Leong,
Lancelot, Bendot, Michael, and Kulhandjian, Michel
(2023). AI-based Human Detection in Heavy Smoke
Using Radar and IR Camera. IEEE Xplore.
Moury, Khadiza Sarwar, Gauhar, Noushin, and Ahsan, Sk.
Md. Masudul (2023). A Rotation and Scale Invari-
ant CNN Model for Disaster Area Detection. IEEE
Xplore.
Llanes, Louis Antonio C., Ulbis, Christian Rhod H., and
Garcia, Ramon G. (2023). Remote-Controlled Water
Vehicle for Flood SAR Using YOLOv4. IEEE Xplore.
Gaur, Samta, and Kumar, J. Sathish (2023). UAV-based Hu-
man Detection in Flood SAR Using YOLOv4. IEEE
Xplore.
Paglinawan, Charmaine C., Lagman, Jewel Kate D., and
Evangelista, Alden B. (2024). YOLOv5-based Human
Detection and Counting in UAV SAR. IEEE Xplore.
Zou, Xiongxin, Peng, Tangle, and Zhou, Yimin (2024).
Visible-Thermal Fused YOLOv5 Network for SAR.
IEEE Xplore.
Chavez, Tricczia Karlisle, and Dela Cruz, Jennifer (2024).
Multi-task Learning for Flood SAR Using YOLOv7
and MobileNetV2. IEEE Xplore.
Sruthy, K.G., Hanan, M., Rinsy, Sulthana A.P., Dev, Gokul,
Muhammed, Fairooz, and Anand, Jithamanue (2024).
Ocean Wings - Human Detection in Open Water Us-
ing Drones and YOLOv8. IEEE Xplore.
Jyotsna, P., Surendar, Sanjay B., Sharan, B., Dhanaselvam,
J., and Rajesh, R. (2024). Thermal Vision RC Tank for
Human Detection in Disaster Areas. IEEE Xplore.
Premachandra, Chinthaka, and Kunisada, Yugo (2024).
GAN-Based Audio Noise Suppression for UAV SAR.
IEEE Xplore.
Sughasini, K.R., Premitha, P.S., Kunanidhi, Charlas G.,
Sreelaxmi, R., and Kushal, A.S. (2024). Underwater
SAR Using Drone. IEEE Xplore.
Liu, Xu, Zhu, Hanhao, Song, Weihua, Wang, Jiahui, Yan,
Lengleng, and Wang, Kelin (2024). Improved VGG-
16 Model for Acoustic Image Recognition in SAR.
IEEE Xplore.
Aji, Andi Alfian Kartika, Sebastian, Matthew, Alexan-
der, Francis, Tsai, Po-Ting, and Lee, Min-Fan Ricky
(2024). Neural Network-Assisted Observer for ASV
Tracking. IEEE Xplore.
Soorki, Mehdi Naderi, Aghajari, Hossein, Ahmadin-
abi, Sajad, Babadegani, Hamed Bakhtiari, Chaccour,
Christina, and Saad, Walid (2024). LoRa-based SAR
Using Meta-RL for UAVs. IEEE Xplore.
Kozlov, Mykyta S., and Malakhov, Eugene V. (2024). Com-
plex Multi-level Drone System for Human Recogni-
tion in SAR. IEEE Xplore.
Dousai, Nayee Muddin Khan, and Loncaric, Sven (2022).
Detecting Humans in SAR Based on Ensemble Learn-
ing. IEEE Xplore.
INCOFT 2025 - International Conference on Futuristic Technology
928
