
Beyond Sight: VQA for Car Parking Detection Using YOLOv8
Sphooti Kulkarni
a
, Anushree Bashetti
b
, Samarth Nasabi
c
and Kaushik Mallibhat
d
School of Electronics and Communication, KLE Technological University, Hubballi, India
Keywords:
VQA, YOLO, Object Detection.
Abstract:
Visual Question Answering (VQA), is an interesting application area of Artificial Intelligence that can enable
the machines to understand the image content and answer questions about the image. VQA integrates vision-
based techniques with the Natural Language Processing techniques. The VQA model uses the visual elements
of the image and information from the question to generate the best possible answer. The paper demonstrates
the use of state of art, object detection algorithm -You Only Look Once (YOLO) for the identification of free
and occupied car slots in a car parking system. Existing VQA systems for parking often struggle with some
limitations including real-time application in dynamic and varying lighting conditions, night or bad weather,
and cannot handle user queries related to parking availability, thus impacting their overall usability and effec-
tiveness in practical applications. In this paper, a car parking VQA model has been designed where both image
and question of the user feed as an input to the proposed system. The image is captured by a camera installed
in the parking lot on a real time basis, and users select a question from the provided question menu. The sys-
tem provides a user-friendly, menu-based question-answering system that allows users to select questions of
interest and receive relevant responses based on the detected parking slot information. The proposed approach
utilizes a YOLOv8 model, trained on the annotated PKLot dataset to detect and count both parked and vacant
slots in real-time. This detection is integrated with a menu-based question-answer system, allowing users
to interact with the model and receive accurate slot information based on their selected queries. The model
performs well in both day and night, even in low- light conditions, due to the diverse PKLot dataset used for
training, which covers various days and weather conditions. To improve efficiency and accuracy, some images
are converted to grayscale, and a custom dataset is created. This preprocessing optimizes performance for
nighttime monochromatic images, enhancing results under varying lighting. Trained on the PKLot dataset,
the model achieved a mean Average Precision (mAP) of 0.994 for vacant and 0.993 for parked slots. The
robust performance stems from the diversity of PKLot images and strategic preprocessing. In simpler terms,
To enhance the efficiency of parking, a novel approach has been adopted, which combines computer vision
with questionnaires presented in a user-friendly menu style, inspired by natural language processing (NLP).
This technique enables the model to accurately detect if parking spaces are available or occupied, ultimately
making the parking experience more convenient and hassle-free.
1 INTRODUCTION
The term ”Visual Question Answering” refers to the
process of observing an image or visual input and pro-
viding an appropriate response to a question related to
that visual content. It is important to consider how a
computer perceives an image or video through com-
puter vision, and then relates the question to the image
in order to provide an answer using natural language
a
https://orcid.org/0009-0006-5170-2880
b
https://orcid.org/0009-0009-2342-2306
c
https://orcid.org/0009-0003-0179-6493
d
https://orcid.org/0000-0002-3610-0332
processing. VQA has gained popularity in the fields
of natural language processing and computer vision
because humans have the ability to view objects in
images and comprehend their characteristics and be-
haviors. VQA is a multi-discipline research topic that
has grown in popularity in natural language process-
ing and computer vision because humans often see
objects in images and understand how they interact
with their qualities and states when they look at them
(Lu, Ding, et al. 2023). VQA has various practi-
cal applications, ranging from medical to fashion. It
tackles the complex task of combining image analysis
with question understanding to generate accurate re-
sponses. In this case, it’s used to determine the status
834
Kulkarni, S., Bashetti, A., Nasabi, S. and Mallibhat, K.
Beyond Sight: VQA for Car Parking Detection Using YOLOv8.
DOI: 10.5220/0013604100004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 2, pages 834-843
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
of parking lots. As the number of cars grows, effec-
tive parking management becomes crucial for places
like universities, malls, and airports. The aim is to
develop a model that accurately detects vacant and
occupied parking spaces. In (Hela, Arakkal, et al.
2022), the slot detection exhibited inaccuracies and
errors when operating under low- light conditions.
The model is also trained to identify parking spaces
at night by analyzing black-and-white images (gray
scale images). Surprisingly, the research unveiled a
striking similarity between nighttime CCTV images
and their corresponding color images after being con-
verted to black and white. As a result, the author
can reliably detect and tally occupied and unoccupied
parking spaces both in daylight conditions, utilizing
RGB images captured by the camera, and at night,
using grayscale images.
The novelty of this work lies in assigning unique
numbers to each parking slot, allowing precise track-
ing of individ- ual slot occupancy. Additionally, the
model is designed to perform slot detection during
both day and night, using RGB and grayscale images,
ensuring continuous monitoring. This capability ad-
dresses a significant challenge in parking lot manage-
ment by providing reliable performance throughout
the day and applicability of the system in real-world
parking lot management scenarios, providing contin-
uous and accurate detection in varying lighting condi-
tions.
1.1 Motivation
Parking-related issues have recently gained signifi-
cant attention among the general public. In urban
cities, the need to address these problems has become
crucial. The rising population and vehicle numbers
have led to a shortage of parking spaces, creating sig-
nificant challenges in finding suitable parking. This
issue is further worsened by the ineffective manage-
ment of existing parking facilities. This paper ad-
dresses parking as a management issue rather than
just a scarcity of spaces. The lack of information on
parking availability leads to resource loss and man-
agement challenges. Additionally, detecting empty
parking spaces at night is crucial. To address this
issue, researchers are working on a solution that in-
volves analyzing grayscale images of parking spots
captured by cameras. This data is then used as input
for their model. While ground sensors are commonly
used to differentiate between parking spaces, they re-
quire continuous maintenance and installation, which
can be expensive.
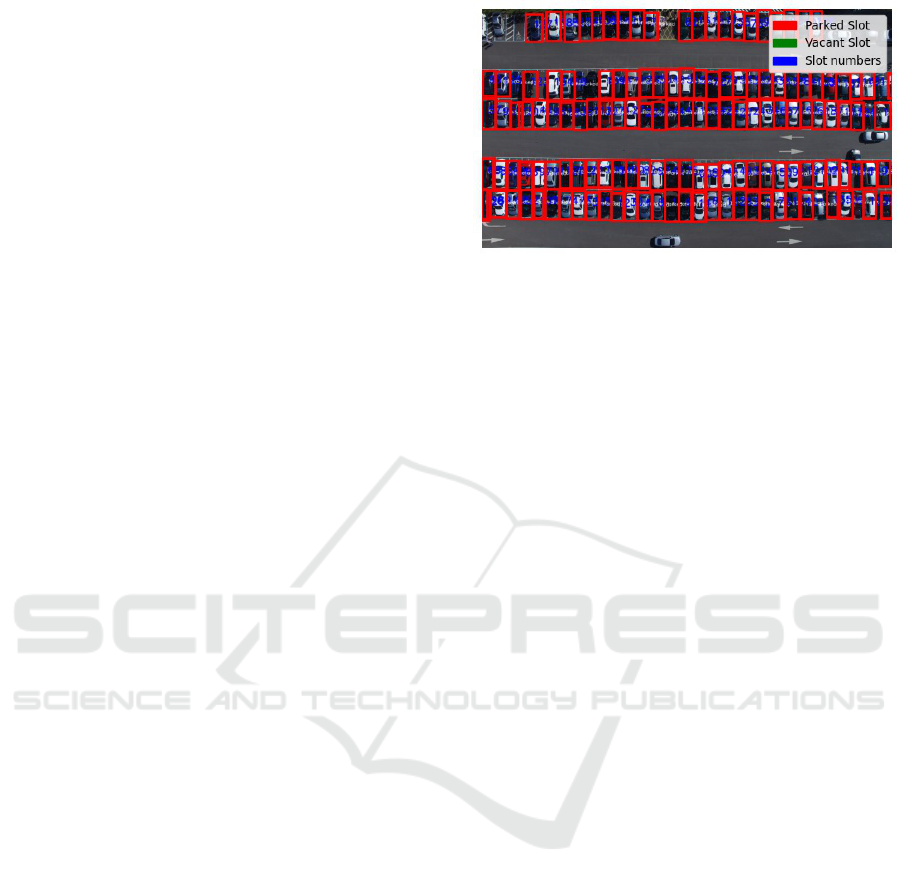
Figure 1: Car parking lot status determined using YOLOv8
2 LITERATURE SURVEY
Several literature surveys have explored the use of
machine learning and deep learning models in vari-
ous scenarios. In more extensive complexes where
self-assisted parking is not feasible and human assis-
tance is insufficient, alterna- tive methods are neces-
sary. Some approaches involve ultrasonic, geomag-
netic, infrared, ground sensors, vision-based systems
that surpass traditional sensors, and other conven-
tional methods (Ding, and Yang, 2019). The study
of the outdoor parking lot parking space identification
method is now one of the significant research projects
utilizing deep learning to handle parking space detec-
tion (Li , 2022). In one study, researchers utilized
the Markov Random Field framework and support
vector machines to determine slot availability. In-
stead of employing image segmentation, they opted
for different machine learning algorithms. In (Zhang,
Zhao, et al. 2023), Parking spot detection is done us-
ing YOLOv5s on the PKLot dataset which achieved
99.6% accuracy. Also the custom dataset was cre-
ated using the data augmentation operations such as
changing bright- ness, contrast, standardization etc.
by collecting images from nine different surveillance
video clips and achieved accuracy of 80.38%. The
drawbacks of the paper is that the model was only
able to detect occupied slots and not vacant slots.
In (Sairam, et al. 2020), both the occupied and va-
cant slots in parking lots are detected using YOLO
and Mask R-CNN (Region-based Convolutional Neu-
ral Network) algorithm and achieved an accuracy of
94%. The improvements suggested to this paper were
that instead of using bounding boxes, masks can be
used for IoU (Intersection over Union) calculations as
they are more precise and easy way to examine the de-
gree of overlap/intersection between predicted object
and ground truth object. In (Singh, and Christoforou,
2021), detections were made using a public dataset
with images from surveillance cameras in various
conditions. Models like MobileNet and ResNet50
Beyond Sight: VQA for Car Parking Detection Using YOLOv8
835

were used for classification. The focus was on im-
proving the ability to detect parking spaces without
relying on visible parking lines. The authors in the
paper, used VQA-based car parking occupancy de-
tection using YOLOv5 and intent classification us-
ing RASA NLU. The model has also been tested in
low-light conditions, but the predictions were incor-
rect. In (Huang, He, et al. 2021), the model is specifi-
cally trained to detune the car at night using Yolov3
and the MobileNet v2 network. In (Amato, Fabio, et
al. 2016), the authors employed the encoder-decoder
structure of SID deep learning approaches to fuse the
YOLO model, which was trained with night- time
data, with the SSD (Single-Slot Detector) model in
order to identify employing smart camera networks.
In (Duy-Linh, Xuan-Thuy, et al. 2023), it enhances
the backbone, neck, and head modules of the network
to improve YOLOv5 for parking lot identification in
smart parking systems. These changes aim to sim-
plify processes, improve workflow, and detection per-
formance.
Recent advancements in automatic car parking
systems highlight the versatility of YOLOv8 across
diverse applica- tions. In one study, an ”Advanced
Car Parking System” integrated with Arduino Uno
and IoT demonstrated real-time parking availabil-
ity, enhancing user convenience while reducing traf-
fic congestion (Sharmila, Rohinth, et al. 2024). A
comparative survey found YOLOv8 to be the most
efficient for object detection in smart car parking
systems, particularly when combined with OpenCV
and EasyOCR for improved image enhancement and
number plate identification (Naik, Borkar, et al.
2024). Additionally, research employing YOLOv5
and CNN for Automated Number Plate Recogni-
tion (ANPR) has improved efficiency in park- ing
management (Surve, Shirsat, et al. 2023). Other
studies have developed smart parking systems using
YOLOv5 and ResNet50, achieving high mean Av-
erage Precision (mAP) for parking space detection
on low-computation devices (Balusamy, Shanmugam,
et al. 2024). Notably, a novel approach utilizing
YOLOv8 for real-time identification of vacant and oc-
cupied parking slots demonstrated signifi- cant im-
provements in parking space management (Shankar,
Singh, et al. 2024). Moreover, the integration of
YOLOv8 with Optical Character Recognition (OCR)
technologies has shown substantial advancements in
character recognition accuracy for number plate de-
tection (Sarhan, Rahem, et al. 2024). Collectively,
these findings suggest that YOLOv8 not only excels
in parking-related tasks but also showcases its adapt-
ability and efficiency across various domains.
Object detection techniques are categorized into
traditional methods and deep learning-based ap-
proaches. Tradi- tional methods, such as Viola-Jones,
SIFT, and HOG, are slower due to computational lim-
itations. In contrast, deep learning mimics human
brain analysis, recognizing complex patterns in im-
ages and text for accurate predictions, and automating
tasks like image description and audio transcription.
1. Introduced in 2001 by Paul Viola and Michael
Jones, the Viola–Jones object detection framework
is a machine learning system primarily designed for
face detection but adaptable to various objects. While
it may not match the accuracy of convolutional neu-
ral networks, its efficiency and compact size make it
suitable for scenarios with limited computational re-
sources (Viola and Jones, 2001). Another approach
in computer vision is the HOG, which counts gra-
dient orientations in specific image areas, though
it faces challenges like slow processing speed and
limitations with scale and light variations in human
detection (Dalal and Triggs, 2005). Additionally,
David Lowe’s SIFT algorithm, dating back to 1999,
is widely used for identifying, characterizing, and
matching local features in images. Its applications
span object recognition, image stitching, 3D model-
ing, gesture recognition, video tracking, wildlife iden-
tification, robotic mapping, and navigation, ensuring
reliable object identification through feature descrip-
tions extracted from training images (Paolo, Andrea
Prati, et al 2012).
2. R-CNN (Regions with CNN Features) revolu-
tionized object detection by combining CNNs with
region pro- posals, significantly improving accuracy
(Gandhi, 2018). The SSD excels in balancing speed
and efficiency for real-time object recognition, mak-
ing a notable impact on applications requiring quick
and precise identification. YOLO is a real-time object
recognition technique known for efficiently locating
and identifying multiple objects within an image or
video frame, streamlining the process for enhanced
speed and effectiveness (Ding and Yang, 2019).
2.1 Objectives
The project focuses on the following objectives. Pro-
pose and implement a deep learning algorithm for
the detec- tion of vacant and occupied slots in a car
parking system. The developed solution should be
able to detect the slots both for daylight and low-
light scenes. Further employ a menu-based question-
answering system, facilitated by a questionnaire, to
understand the user requirements and answer accord-
ingly.
INCOFT 2025 - International Conference on Futuristic Technology
836

2.2 Datasets
Several available datasets include CNRPark+EXT,
CARPK, NDISPark, Parking Space Detection and
Classification, and PKLot available on different web-
sites. Out of these datasets, the CNRPark+Ext dataset
contains car parking lot images captured by various
cameras with different perspectives and under differ-
ent weather conditions. Also, the Car Parking Lot
Dataset (CARPK) consists of approximately 90,000
parking lot car images collected by means of drones
in order to have clearly captured images. NDISPark
dataset includes 250 images of several parking areas
of different situations in real-time captured using dif-
ferent cameras under various weather conditions and
different angles. The Parking Space Detection and
Classification dataset comprised images of parking lot
spaces along with corresponding bounding boxes and
annotations. For the model training, PKLot dataset
is selected, which includes 12,416 images sourced
from surveillance camera frames. These images cap-
ture different parking lots under varied weather con-
ditions, including sunny, cloudy, and rainy days. The
dataset categorizes images into either occupied or un-
occupied, which aids in training the model to differ-
entiate between these two classes effectively. To en-
hance the diversity of the training data, a subset of the
PKLot dataset is strategically employed. Out of the
9656 images selected for training, 1242 were trans-
formed to grayscale. This transformation emulates
night-time captures from CCTV cameras, further en-
riching the dataset with varied lighting conditions.
The remaining images retain their RGB format, con-
tributing to a well- balanced and representative train-
ing dataset. The dataset consisted of 6767 training
images, 1927 validation images, and 962 images for
testing purpose.
2.3 Proposed Pipeline
The first step in the approach is to perform object
detection on images capturing car parking lots from
the collected PKLot dataset. This phase employs
YOLOv8, a state-of-the-art object detection model.
The YOLOv8 model is used for object detection due
to its efficiency and high accuracy in detecting ob-
jects in real-time. The table I presents a comparison
of different YOLO models. YOLOv8 is particularly
well-suited for parking slot detection, as it can rapidly
process images while maintaining high detection ac-
curacy. For the object detection process, two distinct
classes have been defined: ”parked” to indicate oc-
cupied slots and ”vacant” for unoccupied slots. The
YOLOv8 model requires images and corresponding
Figure 2: RGB image from PKLot dataset and converted
grayscale image
annotation files in the YOLO format, detailing class
labels and bounding box coordinates (x, y, width,
height). This YOLO algorithm systematically divides
the input image into a grid of cells, generating pre-
cise bounding boxes for detected objects. The bound-
ing boxes are used to localize objects in the image.
Each predicted bounding box is associated with a con-
fidence score, coordinates, and class predictions (va-
cant or parked). YOLOv8’s performance is evaluated
using the mAP metric, with results showing an mAP
of 0.993 for vacant slots and 0.988 for parked slots,
indicating high accuracy in detecting parking slots un-
der varied conditions. After the successful execution
of object detection, the methodology transitions to the
object counting phase. This step involves counting
the detected objects categorized as parked and vacant
slots separately. The counting process is crucial for
generating answers to user queries and provides key
insights into the current status of the parking lot.
With both object detection and counting achieved,
the subsequent step involves integrating these results
with a menu-based Question Answering system. To
facilitate user interaction, a user-friendly menu featur-
ing a set of ques- tions has been introduced. The users
can select a question of interest, prompting the system
to provide a relevant response. The range of ques-
tions includes various aspects related to parking, such
as the count of parked and vacant slots, and the over-
all status of the parking lot. This system is designed
to enhance the informativeness and accessibility of
the parking lot management system, making it eas-
ier for users to quickly retrieve essential information
Beyond Sight: VQA for Car Parking Detection Using YOLOv8
837
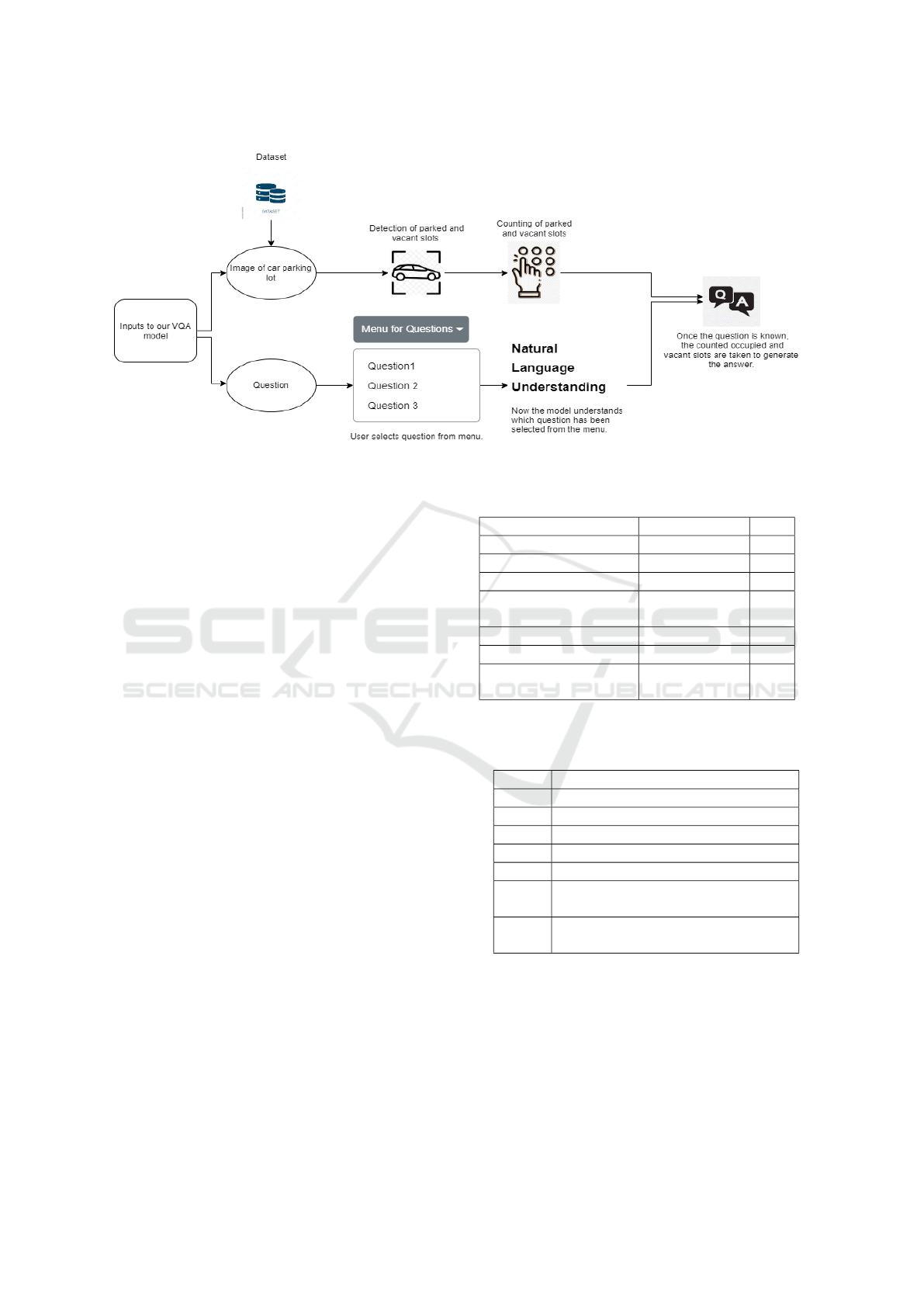
Figure 3: Proposed pipeline
about park- ing availability. The overall methodology
integrates object detection, counting, and question-
answering seamlessly. Once the YOLOv8 model de-
tects and classifies parking slots, the results are passed
to the question answering system, which maps the
detected classes (vacant and parked) to the appropri-
ate answers. For example, if the user asks, ”How
many vacant slots are there?”, the system counts the
instances of vacant slots (class 0) and provides the
result. The Questions are displayed in Table II. To
make this interaction seamless, the system is designed
with a user-friendly menu, enhancing accessibility
and making the solution more intuitive. This inte-
gration of object detection, counting, and interactive
querying provides an effective and user-centric solu-
tion that facilitates real-time parking lot analysis and
decision-making.
3 IMPLEMENTATION AND
RESULTS
In order to train the model, the required dataset
must contain the images of parking lots depicting
clearly the parked and vacant slots. The downloaded
dataset named PKLot contains a separate set of im-
ages for training, validation and testing. The anno-
tation file (.txt file) contains [class, x center, y cen-
ter, width, height] which is in YOLO format and the
data is normalized. The dataset images and annota-
tion files are uploaded in ROBOFLOW in order to get
annotated dataset where image is annotated with its
corresponding annotations .txt file resulting in forma-
tion of bounding boxes along with classes shown in
Table 1: Comparison Table
Method Accuracy Ref
YOLOv5 90% 13
CCN 100% -
YOLOv5 94.31% 2
Custom-YOLOv5M mAP@0.5:
97%
14
YOLOv8 94.27% 16
YOLOv8 98.70% 15
YOLOv8 (Our
model)
mAP@0.5:99.3%-
Table 2: Menu of questions provided to the user
Sl.No. Questions
1 How many cars are parked?
2 How many vacant slots are available?
3 What is the status of the parking lot?
4 Is this slot parked or vacant?
5 Can I park my car?
6 Can I know which all slots are occu-
pied?
7 Can I know which all slots are va-
cant?
Fig. 4. ( class0 – vacant & class1 – parked)
The image shown in Fig. 4 is a sample image de-
picting how an image looks after it gets annotated in
the ROBOFLOW platform, where there are 37 parked
slots and 3 vacant slots. Similar annotations are done
for all 9656 input images. Now a code snippet is gen-
erated which will be compiled in google colab for fur-
ther training of the model. The annotated dataset is
INCOFT 2025 - International Conference on Futuristic Technology
838

Figure 4: Sample annotated image of PKLot Dataset from
Roboflow platform
executed in google colab environment using YOLOv8
with a code snippet and the model is now trained with
5 epochs and imagsz=700 which took around 0.707
hours resulting in a) GPU mem b) box loss c) cls loss
d) dfl loss e) instances and f) size as shown in Fig. 5
Fig. 5 provides an overview of the model’s per-
formance metrics after 5 epochs of training using
YOLOv8 on the parking slot dataset. The graphics
processing unit (GPU) memory usage during training
was 11.5 GB, indicating the computational resources
required for processing. The box loss (0.734) rep-
resents the error in predicting the bound- ing boxes
for the parked and vacant slots, while the class loss
(0.4071) captures the error in classifying the park-
ing spaces as either vacant or occupied. Additionally,
the distribution focal loss (DFL) (0.8912) corresponds
to the model’s confidence in assigning appropriate
bounding boxes during object detection. These losses
indicate the training per- formance, with lower values
corresponding to better predictions. The model han-
dled a total of 318 instances across 1922 images, with
a resolution size of 704x1024 for the input images.
The model’s precision and recall values for detecting
both vacant (class 0) and parked (class 1) slots were
remarkably high, with a precision (P) of 0.99 and re-
call (R) of 0.993 for parked slots, and a precision of
0.993 and recall of 0.99 for vacant slots. The mAP50
(mean Average Precision at 50% IoU threshold) for
both classes was nearly perfect, reaching 0.993 and
0.994, respectively. For more stringent evaluation,
the mAP50-95 metric, which considers IoU thresh-
olds between 50% and 95%, showed a slightly lower
value of 0.88, which is still an excellent result, in-
dicating the model’s robustness in detecting parking
slots under varied conditions and overlapping bound-
ing boxes.
The line graphs shown in Fig. 6 depict the re-
sults of different parameters accessed for object de-
tection technique resulting in how the model is get-
ting trained in batch wise along with the annotated
set of images. The train box loss, train class loss,
and train DFL loss all show a steady decline as the
number of epochs increases, indicating that the model
improves its accuracy in predicting bounding boxes
and classifying parked or vacant slots over time. Sim-
ilarly, the validation box loss, validation class loss,
and validation DFL loss follow a similar downward
trend, suggesting that the model generalizes well to
unseen data. The performance metrics, such as preci-
sion and recall, also show an upward trend, stabilizing
as the model progresses through the epochs, reflect-
ing improvements in the model’s ability to correctly
detect and classify parking slots. The mAP50 and
mAP50-95 metrics demonstrate consistent improve-
ment, indicating that the model is becoming more
proficient in handling varying degrees of overlap be-
tween predicted and actual bounding boxes. These re-
sults demonstrate the efficacy of the YOLOv8 model
in parking slot detection, providing high accuracy
for both parked and vacant slot classification, while
also maintaining strong performance across a range
of challenging IoU thresholds. The decreasing loss
metrics and increasing precision and recall highlight
the robustness of the model in detecting parking slots
in both training and validation phases.
To detect parking slots and count the number of
parked and vacant classes, simple YOLO command
is used i.e. results[0].boxes.cls which gives classes
(0 and 1 in our case) for each detected object us-
ing which the total parked and vacant slots can be
counted. After this part, there is a fixed set of ques-
tions which the user is going to ask, the menu- based
question answer approach makes the user select the
question as per the requirement and our model pro-
cesses the image captured at that point of time and
generates the output. In order to make it user friendly,
GUI (Graphical User Interface) has been designed
and implemented using Visual Studio Code software
as shown in Fig. 8.
3.1 Measuring Outputs
The performance of the car parking slot detection
model is evaluated using a variety of metrics to ensure
a compre- hensive understanding of its capabilities.
Key performance metrics such as precision, recall,
and F1 score are utilized to assess the model’s perfor-
mance, and their respective curves (see Fig. 9) pro-
vide valuable insights into how well the model iden-
tifies parking slots at different confidence levels. The
Precision-Confidence Curve plots the model’s preci-
sion against its confidence score. Precision is the
ratio of true positive detections to the total number
of detec- tions (both true positives and false posi-
tives). As seen in the Fig. 9, the precision remains
high across most confidence levels, indicating that
the model consistently detects parking slots with high
accuracy. A similar trend is observed in the Recall-
Confidence Curve, which plots the recall against con-
Beyond Sight: VQA for Car Parking Detection Using YOLOv8
839
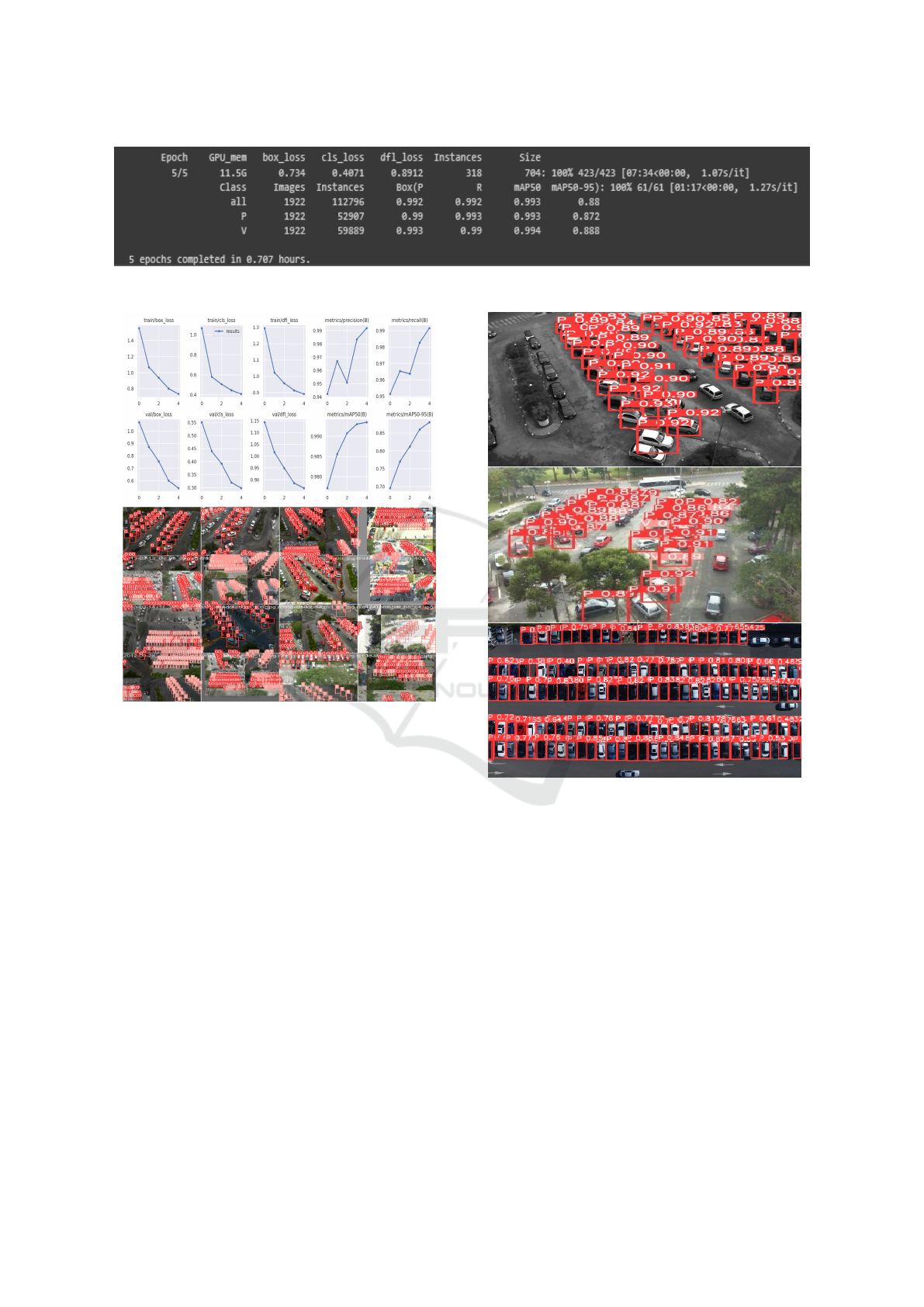
Figure 5: Model training with 5 epochs
Figure 6: Results during training phase
fidence scores. Recall measures the model’s ability to
correctly identify all positive instances (in this case,
both vacant and parked slots) by considering the ratio
of true positives to the total number of actual posi-
tive instances. In this case, the recall is high, sug-
gesting that the model can accurately detect a large
proportion of the parking slots in the images. The F1-
Confidence Curve is a combined measure of precision
and recall, offering a balanced evaluation by consider-
ing both false positives and false nega- tives. The F1
score provides an overall assessment of the model’s
capability to accurately predict parking slots under
varying confidence levels. As seen in the plot, the
model achieves a high F1 score, demonstrating that it
maintains an optimal balance between precision and
recall. The Precision-Recall Curve further quantifies
the trade-off between precision and recall, allowing
for a visual comparison of the model’s performance.
The curve clearly indicates that the model achieves a
high level of performance for both the ”parked” and
”vacant” classes, as indicated by the respective preci-
Figure 7: Results after training
sion and recall values. The mAP value suggests that
the model exhibits excellent precision and recall at
various confidence thresholds, making it well-suited
for real-time car parking slot detection. Additionally,
the Confusion Ma- trix (see Fig. 10) provides a de-
tailed breakdown of the model’s classification results,
showing the true positives, false positives, true neg-
atives, and false negatives. In the matrix, the rows
represent the actual classes (parked, vacant, and back-
ground), while the columns represent the predicted
classes. The values in the matrix show the propor-
tion of cor- rect and incorrect classifications made
by the model. The values on the diagonal indicate
correct classifications, with 99% accuracy for both
parked and vacant classes. The off-diagonal values
indicate misclassifications, with a small percentage of
false positives for ”vacant” slots and false negatives
INCOFT 2025 - International Conference on Futuristic Technology
840
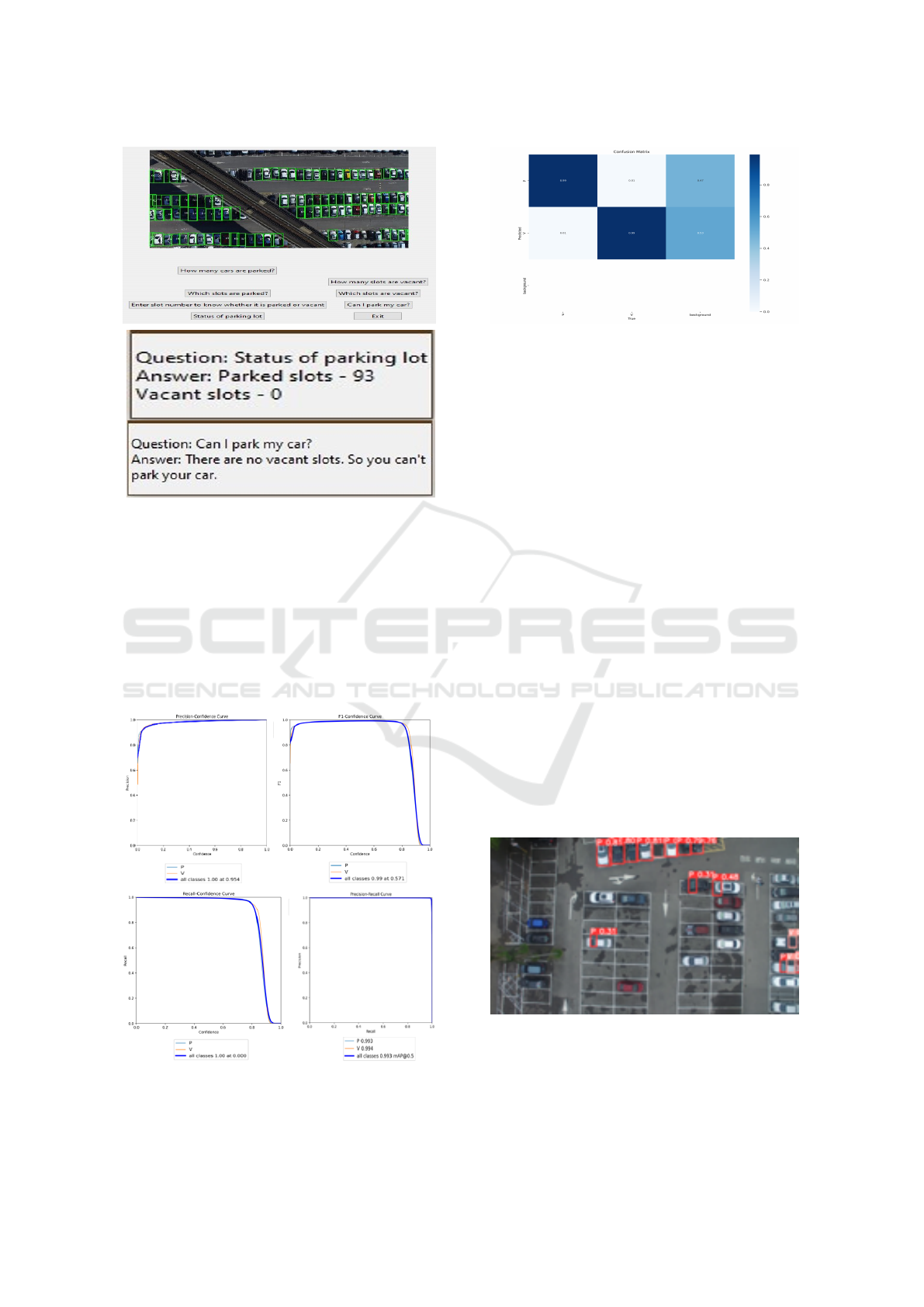
Figure 8: Images of GUI for user interaction selecting dif-
ferent questions from the menu
for ”parked” slots. This detailed analysis helps in
identifying specific areas where the model can be im-
proved, such as minimizing misclassifications and en-
suring better handling of background noise. Together,
these evaluation metrics offer a comprehensive under-
standing of the model’s performance, ensuring that
the car parking slot detection system is both accurate
and reliable across various conditions.
Figure 9: Precision-Confidence, F1-Confidence, Recall-
Confidence and Precision-Recall Curve
Figure 10: Confusion Matrix
3.2 Limitations
The model’s performance in detecting parking slots
raises several critical considerations, particularly in
environ- ments where the parking area is surrounded
by or covered by trees, as trees can obstruct cam-
era views, complicating overhead monitoring. Cam-
eras on tall buildings may struggle with clear images.
Proper camera placement is cru- cial, as low angles
can miss sections of the lot, while high angles may
hinder depth perception, making it difficult to distin-
guish between closely parked cars and vacant slots.
These factors significantly impact detection accuracy.
The challenge is illustrated in Fig. 11, where the
model struggles to accurately predict all parked and
vacant slots due to the dataset’s capture angle. The
camera’s position significantly affects prediction ac-
curacy. To address this, training the model on a more
diverse dataset with images from various angles and
perspectives can enhance its generalization and ro-
bustness. Exposure to different viewpoints during
training will enable the model to adapt to variations
in camera positions, improving its ability to predict
parking slot occupancy in real-world scenarios. Ulti-
mately, diverse data collection is crucial for optimiz-
ing performance across varying conditions.
Figure 11: Image showing improper predictions
Beyond Sight: VQA for Car Parking Detection Using YOLOv8
841

4 CONCLUSION
In this study, we proposed a robust real-time VQA
model for car parking slot detection, utilizing the
state-of-the- art YOLOv8 object detection frame-
work. The model successfully detected and classified
parked and vacant parking slots with an impressive
mAP of 0.993 at an IoU of 0.5. Through the applica-
tion of the PKLot dataset, the research demonstrated
the critical importance of both high-quality and suf-
ficiently diverse datasets, alongside effective prepro-
cessing techniques, in achieving optimal model per-
formance. The integration of a menu-based question-
answering interface further enhanced the usability of
the system, allowing for interactive user queries. Our
results emphasize that YOLOv8 is capable of deliv-
ering accurate and reliable results even in scenarios
with limited data. The results under- score that both
the quality and quantity of the dataset, along with
the chosen processing techniques, are key factors for
the model’s success. These findings validate the ro-
bustness of the YOLOv8 model across varied condi-
tions, show- ing its capability to deliver precise and
reliable car parking analysis in real-time applications.
The metrics, including precision, recall, and F1-score,
collectively highlight the efficiency and potential of
this model for real-time parking lot monitoring. Fu-
ture work will aim at further enhancing model accu-
racy, exploring the integration of additional features,
and optimizing the system for scalability across larger
datasets and varied environmental conditions.
4.1 Future scope
For future work, the proposed car parking slot detec-
tion system could be expanded in several ways to en-
hance its applicability and performance. Firstly, the
system could be improved by integrating real-time
video processing to track vehicle movement dynam-
ically, allowing for real-time parking slot updates.
This would enable the system to monitor multiple
camera feeds simultaneously in large parking areas,
ensuring up-to-the-minute information on slot avail-
ability. Additionally, the model can be further op-
timized to handle more challenging conditions such
as adverse weather (rain, fog, snow) by incorporating
specialized datasets for these conditions. Advanced
techniques like multi- sensor fusion, which combines
data from cameras, LiDAR, or radar, can be explored
to enhance detection in areas where visibility is lim-
ited. The integration of cloud-based solutions for cen-
tralized parking lot management could also facilitate
easier scalability and allow for larger-scale deploy-
ment across various environments, including urban
and rural settings. Another advancement is creating
a model that can identify free parking spaces with-
out relying on visible parking lines. This capabil-
ity would enhance the system’s versatility, allowing
it to function in environments like regular streets or
unmarked lots, thereby expanding its applicability to
various real-world scenarios. Lastly, the system could
be adapted to incorporate payment and reservation
features for users, providing a seamless end-to-end
solution for parking lot management. The addition
of predictive analytics and AI-driven recommenda-
tions, which predict future slot availability based on
usage patterns, could also be an interesting avenue for
future research and development. This would make
the system more intelligent and user-friendly, offer-
ing a holistic approach to smart parking solutions. By
addressing these areas, the system could evolve into
a more robust, accurate, and adaptable solution for
smart parking management.
REFERENCES
Lu, Siyu & Ding, Yueming & Liu, Mingzhe & Yin, Zheng-
tong & Yin, Lirong & Zheng, Wenfeng. (2023). Multi-
scale Feature Extraction and Fusion of Image and Text
in VQA. International Journal of Computational Intel-
ligence Systems. 16. 10.1007/s44196-023- 00233-6.
Hela, Vikash & Arakkal, Lubna & Kalady, Saidalavi.
(2022). CarParkingVQA: Visual Question Answering
application on Car parking occupancy detection. 1-6.
10.1109/INDICON56171.2022.10039925
Ding, Xiangwu & Yang, Ruidi. (2019). Vehicle and Parking
Space Detection Based on Improved YOLO Network
Model. Journal of Physics: Conference Series. 1325.
012084. 10.1088/1742-6596/1325/1/012084
Li, Borui. (2022). Detection of Parking Spaces in Open
Environments with Low Light and Severe Weather.
10.2991/978-2-494069-31-2 354
Zhang, Xin, Wen Zhao, and Yueqiu Jiang. ”Study on
Parking Space Recognition Based on Improved Im-
age Equalization and YOLOv5.” Electronics 12.15
(2023): 3374.
Sairam, Bandi, et al. ”Automated vehicle parking slot detec-
tion system using deep learning.” 2020 Fourth inter-
national conference on computing methodologies and
communication (ICCMC). IEEE, 2020.
Singh, C., & Christoforou, C. (2021). Detection Of
Vacant Parking Spaces Through The Use Of
Convolutional Neural Network. The Interna-
tional FLAIRS Conference Proceedings, 34.
https://doi.org/10.32473/flairs.v34i1.128470
Huang, Shan & he, ye & Chen, Xiao-an. (2021). M-YOLO:
A Nighttime Vehicle Detection Method Combining
Mobilenet v2 and YOLO v3. Journal of Physics:
Conference Series. 1883. 012094. 10.1088/1742-
6596/1883/1/012094
INCOFT 2025 - International Conference on Futuristic Technology
842

Amato, Giuseppe & Carrara, Fabio & Falchi, Fab-
rizio & Gennaro, Claudio & Vairo, Claudio.
(2016). Car parking occupancy detection using smart
camera networks and Deep Learning. 1212-1217.
10.1109/ISCC.2016.7543901
Nguyen, Duy-Linh & Vo, Xuan-Thuy & Priadana, Adri &
Jo, Kang-Hyun. (2023). YOLO5PKLot: A Parking
Lot Detection Network Based on Improved YOLOv5
for Smart Parking Management System. 10.1007/978-
981-99-4914-4 8
P. Sharmila, P. Rohinth, G. Sarvesh, P. Priyadhar-
shan, M. Balasakthishwaran and S. Gandhi, ”Next-
Gen Parking Solutions,” 2024 International Confer-
ence on Communication, Computing and Internet of
Things (IC3IoT), Chennai, India, 2024, pp. 1-6, doi:
10.1109/IC3IoT60841.2024.10550402.
V. Naik, V. Borkar, K. M. C. Kumar and P. Shetgaonkar,
”A Survey On Various Smart Car Parking Systems,”
2024 3rd International Conference for Innovation in
Technology (INOCON), Bangalore, India, 2024, pp.
1-6, doi: 10.1109/INOCON60754.2024.10511587.
D. P. Surve, K. Shirsat and S. Annappanavar, ”“Parkify”
Automated Parking System Using Machine Learn-
ing,” 2023 International Conference on Integrated
Intelligence and Communication Systems (ICIICS),
Kalaburagi, India, 2023, pp. 1-7, doi: 10.1109/ICI-
ICS59993.2023.10421723.
D. Balusamy, G. Shanmugam, B. Rameshkumar, A.
Palanisamy, G. Kingston and L. Ravi, ”Autonomous
Parking Space Detection for Electric Vehicles Based
on Advanced Custom YOLOv5,” 2024 3rd Interna-
tional Conference on Artificial Intelligence For Inter-
net of Things (AIIoT), Vellore, India, 2024, pp. 1-5,
doi: 10.1109/AIIoT58432.2024.10574648.
V. Shankar, V. Singh, V. Choudhary, S. Agrawal
and B. Awadhiya, ”An Enhanced Car Parking
Detection Using YOLOv8 Deep Learning Capa-
bilities,” 2024 First International Conference on
Electronics, Communication and Signal Processing
(ICECSP), New Delhi, India, 2024, pp. 1-5, doi:
10.1109/ICECSP61809.2024.10698155.
Sarhan, A., Abdel-Rahem, R., Darwish, B. et al. Egyptian
car plate recognition based on YOLOv8, Easy-OCR,
and CNN. Journal of Electrical Systems and Inf Tech-
nol 11, 32 (2024). https://doi.org/10.1186/s43067-
024-00156-y
P. Viola and M. Jones, ”Rapid object detection using
a boosted cascade of simple features,” Proceed-
ings of the 2001 IEEE Computer Society Confer-
ence on Computer Vision and Pattern Recognition.
CVPR 2001, Kauai, HI, USA, 2001, pp. I-I, doi:
10.1109/CVPR.2001.990517.
N. Dalal and B. Triggs, ”Histograms of oriented gradients
for human detection,” 2005 IEEE Computer Society
Conference on Computer Vision and Pattern Recog-
nition (CVPR’05), San Diego, CA, USA, 2005, pp.
886-893 vol. 1, doi: 10.1109/CVPR.2005.177.
Piccinini, Paolo, Andrea Prati, and Rita Cucchiara. ”Real-
time object detection and localization with SIFT-based
clustering.” Image and Vision Computing 30.8 (2012):
573-587.
R. Gandhi, ”R-CNN, Fast R-CNN, Faster R-CNN, YOLO
— Object Detection Algorithms,” 2018.
Xiangwu Ding and Ruidi Yang, ”Vehicle and Parking Space
Detection Based on Improved YOLO Network,” Conf.
Ser. 1325 012084
Beyond Sight: VQA for Car Parking Detection Using YOLOv8
843
