
Real-Time Early Detection of Forest Fires Using Various YOLO11
Architectures
Sarvesh S Sankop, Anoop U Kadakol, Md Sami A Ghori,
Prithvi M Ganiger, Uday Kulkarni and Shashank Hegde
School of Computer Science and Engineering, KLE Technological University, Hubli, Karnataka, India
Keywords:
Forest Fire Detection, YOLO, Deep Learning, Real-Time Detection, Satellite Imagery, Drone Imagery,
Transfer Learning, Data Augmentation, Computational Efficiency, Edge Computing.
Abstract:
Forest fires are an important environmental hazard threatening biodiversity, ecosystems, and human safety.
Early and accurate detection is critical for minimizing damage and ensuring timely intervention. This pro-
posed work leverages the YOLO11 architecture to create a robust and efficient forest fire detection framework.
The proposed approach achieves superior detection performance under diverse environmental conditions by
introducing advanced modules such as C3K2, SPFF, and C2PSA, and leveraging transfer learning. The frame-
work is trained on a heterogeneous dataset combining satellite, drone, and ground-level imagery, capturing
a wide spectrum of forest fire scenarios across varying terrains and lighting conditions. The inclusion of
data augmentation techniques enhances model generalization to unseen fire patterns. The results indicate that
YOLO11-M achieves the best trade-off between precision (85.3%) and recall (81.1%), with a mean average
precision (mAP @ 50) of (84. 9%), while YOLO11-N offers high computational efficiency for deployment in
resource-constrained environments such as edge devices. Furthermore, the integration of real-time detection
capabilities enables rapid response to forest fire outbreaks, making this framework a valuable tool for disaster
prevention, ecological preservation, and safeguarding human lives.
1 INTRODUCTION
Forest fires are among the most destructive envi-
ronmental disasters, causing widespread damage to
biodiversity, wildlife habitats, and human communi-
ties. These fires devastate ecosystems that have de-
veloped over centuries, pushing endangered species
closer to extinction by erasing their natural habitats
(Kim and Muminov, 2023; Mohnish et al., 2022;
Zhang et al., 2023b) . Furthermore, smoke and pollu-
tants released during wildfires lead to climate change,
creating a cycle of environmental degradation. Moun-
tainous regions, known for their dense forests and di-
verse species, are vulnerable due to rugged terrains
and weather patterns that allow fires to spread rapidly
(Jiao et al., 2019; Zhang et al., 2023a).
Traditional forest fire detection methods, such as
manual patrols and satellite monitoring, have limited
the damage but are often slow, costly, and ineffective,
particularly in remote areas(Ji et al., 2024; Jia et al.,
2023). These limitations lead to delayed responses,
allowing fires to grow uncontrollably and cause sig-
nificant losses. With forest fires becoming more fre-
quent and severe due to climate change and human ac-
tivities, there is an urgent need for advanced, real-time
solutions to detect fires early and predict fire-prone ar-
eas(Akhloufi et al., 2020; Prakash et al., 2023; Zhang
et al., 2022).
The proposed research addresses these challenges
by proposing a modern solution that utilizes the
YOLO11(Ali and Zhang, 2024) deep learning frame-
work for real-time forest fire detection and prediction.
YOLO11’s high accuracy, speed, and real-time pro-
cessing capabilities make it an ideal candidate for this
task(Vasconcelos et al., 2024). Integrated with drone
technology, the system can capture high-resolution
images of forested areas, detecting early fire signs
such as smoke and small flames, even in remote and
rugged terrain(Fodor and Conde, 2023). Furthermore,
by using meteorological data such as temperature, hu-
midity, and wind speed, the system can predict fire-
prone regions and facilitate proactive measures to pre-
vent outbreaks (Shroff, 2023; Zhao et al., 2022a;
Zhang et al., 2023b).
A critical component of this study is using satel-
lite images, which provide data for monitoring vast
Sanikop, S. S., Kadakol, A. U., Ghori, M. S. A., Ganiger, P. M., Kulkarni, U. and Hegde, S.
Real-Time Early Detection of Forest Fires Using Various YOLO11 Architectures.
DOI: 10.5220/0013601200004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 2, pages 747-753
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
747
and difficult-to-reach forest regions. Satellite im-
agery offers a broad perspective and the ability to
capture high-resolution photos across different time
frames, which is important for detecting early signs
of fire, such as smoke plumes and changes in vege-
tation. Our dataset, which includes satellite images
from various sources, is the foundation for training
the YOLO11(Ali and Zhang, 2024) model. The di-
verse dataset contains multiple environmental condi-
tions, geographical features, and fire events, making it
ideal for building a robust fire detection system(Yang
et al., 2024; Li et al., 2022).
The paper explains the architecture and innova-
tions of the model, as well as its application to
real-time forest fire detection and prediction. Sec-
tion 2 outlines the background and related works, pro-
viding insights into the evolution of YOLO (Wang
et al., 2021a) models and their limitations in similar
tasks, and discusses YOLO11’s Architecture. Sec-
tion 3 describes the proposed framework, including
details about data collection, preprocessing, and train-
ing methodologies.Moving on to the Results and Dis-
cussion Section 4 evaluates the performance of dif-
ferent YOLO11 variants, emphasizing their suitability
for diverse scenarios. Finally, the Conclusion and Fu-
ture Work Section 5 provides a summary of the over-
all contributions of the work and proposes directions
for future research to enhance the system’s scalabil-
ity, efficiency, and adaptability to diverse real-world
scenarios.
2 BACKGROUND AND RELATED
WORKS
The YOLO series has evolved significantly to ad-
dress the increasing demands of real-time object de-
tection tasks. YOLOv1 (Zhao et al., 2022b) intro-
duced single-pass object detection for rapid inference
but faced challenges with small objects and dense en-
vironments. YOLOv2 (Wu and Zhang, 2018) and
YOLOv3 (Al-Smadi et al., 2023) brought improve-
ments such as batch normalization, anchor boxes, and
multi-scale detection, enhancing accuracy but still
struggling to detect subtle features like faint smoke
or small flames. Further advancements, including
YOLOv4 (Zhao et al., 2022c; Wang et al., 2021b)
and YOLOv5, focused on computational efficiency
and adaptability to edge devices. The subsequent
iterations, YOLOv6 through YOLOv10 (Talaat and
ZainEldin, 2023; Huynh et al., 2024), refined these
aspects while addressing false positives and overlap-
ping detections. However, processing high-resolution
satellite imagery remained a challenge, highlighting
the need for further innovation in forest fire detection
tasks.
YOLO11 addresses these challenges with archi-
tectural enhancements like the C3K2 block, SPFF
module, and C2PSA block. These components im-
prove spatial feature extraction and multi-scale fea-
ture aggregation, ensuring precise detection even un-
der complex conditions. With superior speed and ac-
curacy, YOLO11 bridges the gap between real-time
performance and scalability, outperforming state-of-
the-art methods such as Transformer-based object de-
tectors which makes YOLO11 a robust and reliable
solution for detecting forest fires across diverse envi-
ronmental conditions and image resolutions.
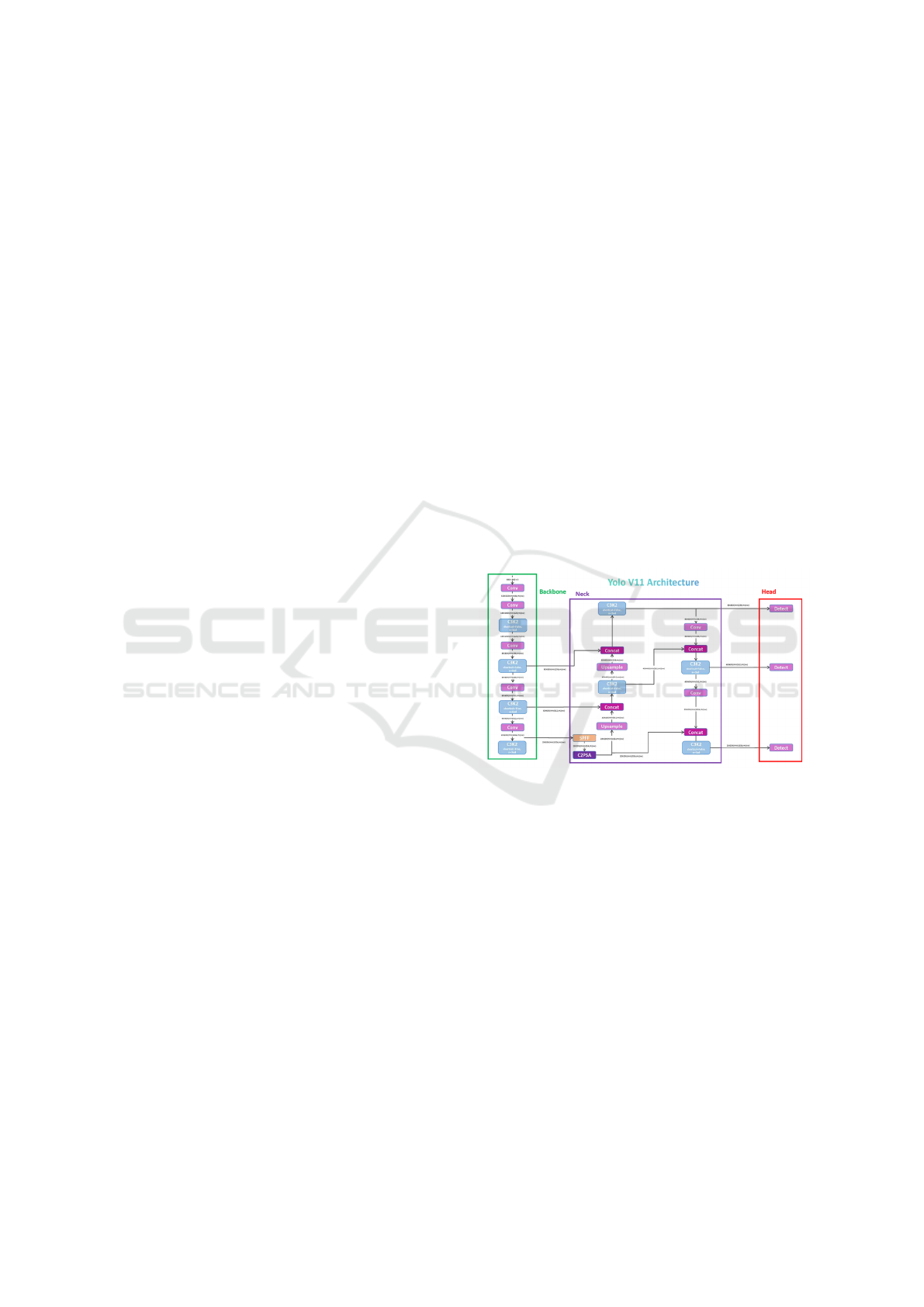
2.1 Architecture of YOLO11
The YOLO11 architecture comprises three main com-
ponents: Backbone, Neck, and Head, which work to-
gether to achieve high accuracy, scalability, and ef-
ficiency in various object detection tasks. Figure 1
shows the overall architecture of YOLO11, detailing
the flow from the Backbone to the Head.
Figure 1: An overview of the YOLO11 architecture, high-
lighting its backbone, neck, and head components.
2.1.1 Backbone
The Backbone extracts spatial features from input im-
ages using convolutional layers. It applies convo-
lution, activation, and downsampling operations to
identify patterns such as edges and textures. This
process can be mathematically represented in Equa-
tion 1,explaining convolution operation:
Output
conv
= ReLU(Conv(X, W) + b) (1)
Here, X represents the input, W is the filter ker-
nel, and b is the bias term. Equation 1 explains how
combining convolution and ReLU activation extracts
essential features. Residual connections in the C3
blocks, shown in Figure 1, improve gradient flow and
enable multi-resolution feature extraction.
INCOFT 2025 - International Conference on Futuristic Technology
748

2.1.2 Neck
The Neck is an intermediary between the Backbone
and the Head, aggregating multiresolution features
to enable effective object detection across various
scales. Figure 1 highlights the role of the Neck in
fusing features for improved detection.
It uses Spatial Pyramid Pooling-Fast (SPPF) to
capture contextual information across multiple scales,
as shown in the middle section of Figure 1. This
method allows the model to detect objects even in
complex scenarios effectively. Cross-scale connec-
tions further enhance feature integration, preserv-
ing fine-grained details critical for detecting small or
overlapping objects.
2.1.3 Head
The Head generates the final predictions, includ-
ing bounding box coordinates, class probabilities,
and objectness scores. Bounding box predictions
(x, y, w, h) are offsets relative to predefined anchor
boxes. Equation 2 explains how class probabilities
for each bounding box are computed using the soft-
max function:
P
class
=
e
z
i
∑
j
e
z
j
(2)
Here, z
i
represents the score for class i, and the soft-
max ensures the probabilities sum to 1, making pre-
dictions interpretable.
Equation 3 explains the objectness score, which
uses the sigmoid function to determine whether a
bounding box likely contains an object:
S
object
= σ(z) (3)
The Head operates across multiple scales to detect
objects of varying sizes, as depicted in Figure 1. Non-
Maximum Suppression (NMS) eliminates redundant
detections, retaining the most confident predictions.
This design ensures precision and efficiency, making
YOLO11 suitable for real-time applications.
3 PROPOSED METHODOLOGY
The proposed framework Figure 3 aims to utilize
the latest advances in object detection techniques to
accurately and efficiently identify forest fires using
satellite and drone imagery. The framework lever-
ages YOLO11’s architectural enhancements, such as
the C3K2 block, SPFF module, and C2PSA block,
to ensure superior performance in real-time detection
tasks. The major steps of the proposed work are given
below:
3.1 Dataset and Preprocessing
The development of an efficient forest fire detection
system began with the creation of a custom dataset
comprising 5,514 images collected from satellite and
drone imagery. The dataset captured variations in fire
intensities, lighting conditions, and obstructions such
as smoke, reflecting real-world complexities as shown
in Figure 2.
Figure 2: Sample Images from our Dataset which includes
Satellite and Drone Images.
To facilitate training and evaluation, the dataset
was divided into three subsets: 80% (4,411 images)
for training, 10% ( 551 images) for validation, and
10% (552 images) for testing.
This division ensured a large training set for model
learning while providing balanced validation and test
sets for unbiased performance benchmarks. Each sub-
set was carefully composed to include diverse condi-
tions such as fire intensities, times of day, and envi-
ronmental obstructions.
The data set collected was preprocessed to en-
sure compatibility with YOLO11 models and improve
training quality. Images were resized to 640×640 pix-
els to standardize dimensions and optimize computa-
tional efficiency. Annotation of flames, smoke, and
scorched areas was performed using tools like La-
belImg and Roboflow, providing accurate bounding
boxes for supervised learning.
To enhance model generalization, data augmenta-
tion techniques such as flips, brightness adjustments,
and rotations were applied, simulating various envi-
ronmental and perspective conditions. These prepro-
cessing steps ensured the dataset’s robustness and rep-
resentativeness of real-world forest fire scenarios.
Real-Time Early Detection of Forest Fires Using Various YOLO11 Architectures
749

Figure 3: Proposed Workflow of our methodology for forest fire detection, including dataset collection, preprocessing, feature
extraction, hyperparameter optimization, model evaluation, and selection of the best-performing YOLO model.
3.2 Feature Extraction and Fine-Tuning
Feature extraction was performed using pre-trained
YOLO models initially trained on large-scale
datasets. These models extracted critical features
such as texture, shape, and edge details relevant to
forest fire detection. The initial layers of the YOLO
models were frozen to preserve generic feature repre-
sentations, while the later layers were fine-tuned us-
ing the forest fire dataset to adapt to domain-specific
patterns like smoke and fire signatures. Key parame-
ters, such as learning rate, were adjusted during this
process to improve detection accuracy.
The feature extraction process is represented as:
F
forest
= f (W pretrained, X
input
) (4)
Here, F
forest
denotes the feature map for forest
fire detection, Wpretrained refers to the pre-trained
YOLO weights, and X
input
represents the input image.
Equation 4 explains how features are extracted from
pre-trained YOLO models and adapted to the forest
fire dataset.
3.3 Hyperparameter Optimization
Key hyperparameters, including learning rate, batch
size, and number of epochs, were tuned to enhance
model performance. Both grid search and random
search techniques were employed to identify optimal
configurations. Grid search explored predefined pa-
rameter ranges, while random search sampled values
within specified intervals. This hybrid approach en-
sured efficient and effective optimization.
The optimization process can be expressed as:
H
∗
= arg min
H
L (H;D
train
) (5)
Here, H represents the set of hyperparameters, L
is the loss function, and D
train
is the training dataset.
Equation 5 illustrates the optimization process used to
fine-tune hyperparameters for effective training.
3.4 Model Training
The YOLO11 loss function optimizes three aspects:
accurate classification, reliable confidence, and pre-
cise localization. The total loss is expressed as:
L = λ
cls
· L
cls
+ λ
obj
· L
obj
+ λ
box
· L
box
(6)
Equation 6 explains how the total loss function
combines classification, confidence, and localization
losses for training YOLO11 models.
- Class Loss (L
cls
) ensures accurate object catego-
rization, penalizing incorrect classifications:
L
cls
= −
C
∑
i=1
p
i
log( ˆp
i
) (7)
Equation 7 explains how classification accuracy is
calculated by comparing predicted and true probabil-
ities.
- Object Loss (L
obj
) evaluates prediction confi-
dence using Binary Cross-Entropy:
L
obj
= − [ylog( ˆy)+ (1 − y)log(1 − ˆy)] (8)
Equation 8 explains how objectness confidence is
penalized based on prediction and ground truth.
- Box Loss (L
box
) refines bounding box alignment
using Complete Intersection over Union (CIoU):
L
box
= 1 − IoU +
ρ
2
(b, b
gt
)
c
2
+ αv (9)
Equation 9 explains how IoU improves bounding
box accuracy by minimizing distance and aspect ratio
differences.
This design ensures that YOLO11 is effective in
classifying and localizing fire indicators like smoke
and flames under diverse conditions while maintain-
ing efficiency for real-time applications.
INCOFT 2025 - International Conference on Futuristic Technology
750

4 RESULTS AND DISCUSSION
This section presents the results and analysis of
the YOLO11-N, YOLO11-M, and YOLO11-L mod-
els applied to the forest fire detection task. The eval-
uation is based on three primary performance met-
rics: mean Average Precision (mAP@50), Precision,
and Recall. A comparative discussion highlights the
strengths, weaknesses, and trade-offs of each model
in terms of detection accuracy, computational effi-
ciency, and suitability for real-time deployment in di-
verse scenarios.
4.1 YOLO11-N
The YOLO11-N variant achieved a mean Average
Precision (mAP@50) of 81.8%, with Precision at
84.2% and Recall at 79.2%. This model is lightweight
and computationally efficient, making it suitable for
deployment on edge devices. The rapid convergence
of loss components, such as Box Loss and Object
Loss, indicates its effectiveness in learning core ob-
ject detection tasks within the first 150 epochs.
Figure 4: Training loss curves for the YOLO11-N variant,
showing the convergence of Box Loss, Class Loss, and Ob-
jectness Loss over 150 epochs.
However, its slightly lower recall compared to
YOLO11-M suggests it may miss some smaller or
less distinct fire indicators. Figure 4 represents the
loss curves for the YOLO11-N model, showcasing its
fast convergence across all training components.
4.2 YOLO11-M
Among the three variants, YOLO11-M demonstrated
the highest performance, with a mean Average Preci-
sion (mAP@50) of 84.9%, Precision of 85.3%, and
Recall of 81.1%. This balance between Precision
and Recall makes it the most suitable for applica-
tions requiring high detection accuracy and sensitiv-
ity. The smooth loss convergence and consistent gen-
eralization indicate that YOLO11-M effectively cap-
tures both spatial and contextual features critical for
forest fire detection. The Figure 5 illustrates the train-
ing loss curves for YOLO11-M. It emphasizes the
smooth and stable convergence of the total loss and
its components Its performance highlights its robust-
ness in detecting subtle fire indicators across varying
environmental conditions.
Figure 5: Loss curves for YOLO11-M during training,
demonstrating smooth and stable convergence across all
components.
4.3 YOLO11-L
YOLO11-L prioritized Precision, achieving a score
of 89.1%, but with a lower Recall of 77.4% and
mAP@50 of 80.4%. Its high Precision minimizes
false positives, making it ideal for applications where
accuracy is critical, such as disaster management or
high-security environments. However, its reduced
Recall suggests limitations in detecting smaller or
partially occluded fire indicators. The model’s com-
Figure 6: Training loss curves for the YOLO11-L variant.
putational demands also make it less suitable for
real-time applications on resource-constrained de-
vices. Figure 6 highlights the YOLO11-L training
loss curves, reflecting its prioritization of Precision
over Recall.
4.3.1 Comparative Analysis
The comparative performance analysis reveals that
YOLO11-M strikes the best balance between accu-
racy, sensitivity, and computational efficiency. While
YOLO11-N is optimal for lightweight applications,
YOLO11-L is preferable for precision-critical tasks.
The diverse strengths of these models make them
adaptable for various deployment scenarios, from
real-time edge computing to high-accuracy monitor-
ing systems.Table 1 illustrates the comparative per-
formance of the three YOLO11 variants in terms of
mAP@50, Precision, and Recall.
Real-Time Early Detection of Forest Fires Using Various YOLO11 Architectures
751

Table 1: Performance comparison of YOLO11-N,
YOLO11-M, and YOLO11-L models based on mAP@50,
Precision, and Recall metrics.
Model mAP@50(%) Precision(%) Recall(%)
YOLO11-N 81.8 84.2 79.2
YOLO11-M 84.9 85.3 81.1
YOLO11-L 80.4 89.1 77.4
4.3.2 Visual Analysis
Figure 7: Sample Output of our YOLO11 model identifying
smoke and flames in diverse forest conditions. The bound-
ing boxes display the model’s capability to detect small fires
and faint smoke effectively.
Qualitative results, including bounding box visu-
alizations, illustrate the models’ capabilities in accu-
rately identifying flames, smoke, and scorched areas
under diverse environmental conditions. These vi-
sualizations confirm the adaptability of the YOLO11
framework for real-world forest fire detection tasks,
even in challenging scenarios with occlusions, dense
vegetation, and varying lighting conditions Figure 7
provides qualitative visualizations of the YOLO11
framework, showing its ability to detect flames and
smoke in challenging environmental conditions.
5 CONCLUSION AND FUTURE
SCOPE
This study proposes an advanced framework for
real-time forest fire detection using the innovative
YOLO11 architecture. With components like the
C3K2 block, SPFF module, and C2PSA block,
YOLO11 excels in detecting early fire indicators
such as smoke and flames. Among its variants,
YOLO11-M achieves the best balance between pre-
cision and recall, while YOLO11-N is ideal for
resource-constrained environments, and YOLO11-L
minimizes false positives for critical applications.
Tested on diverse satellite and drone imagery, the
framework demonstrates robust performance, making
YOLO11 a reliable tool for early fire detection and
management.
Future work includes expanding the dataset to
cover more diverse conditions and integrating multi-
modal data like thermal imaging and meteorological
inputs for enhanced accuracy. Deploying YOLO11 on
lightweight edge devices such as drones and IoT sen-
sors can enable real-time monitoring in remote areas.
Additionally, combining YOLO11 with fire spread
modeling could offer a comprehensive solution for
proactive fire management, reducing wildfire impacts
globally.
REFERENCES
Akhloufi, M. A., Castro, N. A., and Couturier, A. (2020).
Unmanned aerial systems for wildland and forest fires.
arXiv preprint arXiv:2004.13883.
Al-Smadi, Y., Alauthman, M., Al-Qerem, A., Aldweesh,
A., Quaddoura, R., Aburub, F., Mansour, K., and Alh-
miedat, T. (2023). Early wildfire smoke detection us-
ing different yolo models. Machines, 11(2):246.
Ali, M. L. and Zhang, Z. (2024). The yolo framework:
A comprehensive review of evolution, applications,
and benchmarks in object detection. Computers,
13(12):336.
Fodor, G. and Conde, M. V. (2023). Rapid deforesta-
tion and burned area detection using deep multi-
modal learning on satellite imagery. arXiv preprint
arXiv:2307.04916.
Huynh, T. T., Nguyen, H. T., and Phu, D. T. (2024). Enhanc-
ing fire detection performance based on fine-tuned
yolov10. Computers, Materials & Continua, 81(2).
Ji, C., Yang, H., Li, X., Pei, X., Li, M., Yuan, H., Cao, Y.,
Chen, B., Qu, S., Zhang, N., et al. (2024). Forest wild-
fire risk assessment of anning river valley in sichuan
province based on driving factors with multi-source
data. Forests, 15(9):1523.
Jia, X., Wang, Y., and Chen, T. (2023). Forest fire de-
tection and recognition using yolov8 algorithms from
uavs images. In 2023 IEEE 5th International Con-
ference on Power, Intelligent Computing and Systems
(ICPICS), pages 646–651.
Jiao, Z., Zhang, Y., Xin, J., Mu, L., Yi, Y., Liu, H., and Liu,
D. (2019). A deep learning based forest fire detection
INCOFT 2025 - International Conference on Futuristic Technology
752

approach using uav and yolov3. In 2019 1st Interna-
tional conference on industrial artificial intelligence
(IAI), pages 1–5. IEEE.
Kim, S.-Y. and Muminov, A. (2023). Forest fire smoke
detection based on deep learning approaches and un-
manned aerial vehicle images. Sensors, 23(12):5702.
Li, Y., Shen, Z., Li, J., and Xu, Z. (2022). A deep learn-
ing method based on srn-yolo for forest fire detection.
In 2022 5th International Symposium on Autonomous
Systems (ISAS), pages 1–6.
Mohnish, S., Akshay, K., Pavithra, P., Ezhilarasi, S., et al.
(2022). Deep learning based forest fire detection and
alert system. In 2022 International Conference on
Communication, Computing and Internet of Things
(IC3IoT), pages 1–5. IEEE.
Prakash, M., Neelakandan, S., Tamilselvi, M., Velmu-
rugan, S., Baghavathi Priya, S., and Ofori Martin-
son, E. (2023). Deep learning-based wildfire image
detection and classification systems for controlling
biomass. International Journal of Intelligent Systems,
2023(1):7939516.
Shroff, P. (2023). Ai-based wildfire prevention, de-
tection and suppression system. arXiv preprint
arXiv:2312.06990.
Talaat, F. M. and ZainEldin, H. (2023). An improved fire
detection approach based on yolo-v8 for smart cities.
Neural Computing and Applications, 35(28):20939–
20954.
Vasconcelos, R. N., Franca Rocha, W. J., Costa, D. P.,
Duverger, S. G., Santana, M. M. d., Cambui, E. C.,
Ferreira-Ferreira, J., Oliveira, M., Barbosa, L. d. S.,
and Cordeiro, C. L. (2024). Fire detection with
deep learning: A comprehensive review. Land,
13(10):1696.
Wang, S., Chen, T., Lv, X., Zhao, J., Zou, X., Zhao, X.,
Xiao, M., and Wei, H. (2021a). Forest fire detection
based on lightweight yolo. In 2021 33rd Chinese Con-
trol and Decision Conference (CCDC), pages 1560–
1565. IEEE.
Wang, S., Chen, T., Lv, X., Zhao, J., Zou, X., Zhao, X.,
Xiao, M., and Wei, H. (2021b). Forest fire detection
based on lightweight yolo. In 2021 33rd Chinese Con-
trol and Decision Conference (CCDC), pages 1560–
1565.
Wu, S. and Zhang, L. (2018). Using popular object de-
tection methods for real time forest fire detection. In
2018 11th International symposium on computational
intelligence and design (ISCID), volume 1, pages
280–284. IEEE.
Yang, S., Huang, Q., and Yu, M. (2024). Advancements
in remote sensing for active fire detection: a review
of datasets and methods. Science of the total environ-
ment, page 173273.
Zhang, L., Li, J., and Zhang, F. (2023a). An efficient forest
fire target detection model based on improved yolov5.
Fire, 6(8).
Zhang, L., Wang, M., Ding, Y., and Bu, X. (2023b). Ms-
frcnn: A multi-scale faster rcnn model for small target
forest fire detection. Forests, 14(3):616.
Zhang, Y., Chen, S., Wang, W., Zhang, W., and Zhang,
L. (2022). Pyramid attention based early forest fire
detection using uav imagery. In Journal of Physics:
Conference Series, volume 2363, page 012021. IOP
Publishing.
Zhao, L., Zhi, L., Zhao, C., and Zheng, W. (2022a). Fire-
yolo: A small target object detection method for fire
inspection. Sustainability, 14(9).
Zhao, L., Zhi, L., Zhao, C., and Zheng, W. (2022b). Fire-
yolo: a small target object detection method for fire
inspection. Sustainability, 14(9):4930.
Zhao, S., Liu, B., Chi, Z., Li, T., and Li, S. (2022c). Charac-
teristics based fire detection system under the effect of
electric fields with improved yolo-v4 and vibe. IEEE
Access, 10:81899–81909.
Real-Time Early Detection of Forest Fires Using Various YOLO11 Architectures
753
