
Optimizing Node Localization in Wireless Sensor Networks Using an
Enhanced Cuckoo Search Algorithm
Gadagi Omkar
1
a
, Nimmala Gangothri
1
, Radharapu Vishal
1
,
Saroja Kumar Rout
1
b
,
Kottu Santosh Kumar
1
c
and Bijaya Kumar Sethi
2
d
1
Department of Information Technology, Vardhaman College of Engineering(Autonomous), Hyderabad, India
2
Department of Computer Science and Engineering (Data Science), Vardhaman College of Engineering(Autonomous),
Hyderabad, India
Keywords: Wireless Sensor Networks (WSNs), Cuckoo Search Algorithm (CSA), Particle Swarm Optimization (PSO).
Abstract: Node localization is a fundamental challenge in Wireless Sensor Networks (WSNs), crucial for efficient
network operation and data accuracy. Traditional localization methods often struggle with balancing accuracy
and computational efficiency, especially in large-scale deployments with limited resources. This project
presents an enhanced Cuckoo Search Algorithm (CSA) tailored for optimizing node localization in WSNs.
By incorporating modifications such as adaptive step-size control, hybridization with Particle Swarm
Optimization (PSO), and refined Levy flight patterns, the enhanced CSA significantly improves both the
accuracy and convergence speed of the localization process. The proposed method is evaluated through
extensive simulations under various network scenarios, including different node densities, environmental
conditions, and noise levels. Results demonstrate that the enhanced CSA outperforms conventional
localization algorithms, reducing localization errors and computational overhead while maintaining
robustness against environmental uncertainties.
The results obtained show that all localizable nodes in the
network with an ALE of 0.5-0.8m were successfully localized by the ECS method. Furthermore, when
compared to the modified CS method, the ECS approach shows an 80% decrease in the average time required
to localize all of the localizable nodes. This improvement paves the way for more reliable and energy-efficient
WSN deployments, making it a valuable contribution to the field of sensor networks and related applications.
1 INTRODUCTION
In Wireless Sensor Networks (WSNs), node
localization is a crucial challenge because precise
sensor node position knowledge is necessary for
effective network functioning and data interpretation.
Tasks like event detection, monitoring, and data
aggregation are made possible by localization, which
gives the network nodes positional information.
Traditional localization methods in WSNs, such as
Triangulation and Trilateration using signal
measurements (RSSI, AoA, ToA), often struggle with
balancing localization accuracy and computational
efficiency, especially in large-scale and resource-
a
https://orcid.org/0009-0008-6332-3858
b
https://orcid.org/0000-0001-9007-3665
c
https://orcid.org/0000-0002-5117-9456
d
https://orcid.org/0000-0002-9041-085X
constrained networks
(
Niculescu and Nath,2003),
(Rout, Mehta, Swain, Rath and Lenka, 2015).
Moreover, these methods can suffer from issues like
communication overhead and environmental
uncertainties, leading to increased energy
consumption and reduced performance in real-world
deployments (Rout, Rath, and Bhagabati,2016). Bio-
inspired metaheuristic algorithms, such as the Cuckoo
Search Algorithm (CSA), have become popular for
resolving node localization issues in response to these
difficulties. In order to obtain the best answers, CSA,
an optimization algorithm inspired by nature, mimics
the behavior of cuckoo birds that lay their eggs in
other birds' nests (Yang, 2010). Although CSA has
722
Omkar, G., Gangothri, N., Vishal, R., Rout, S. K., Kumar, K. S. and Sethi, B. K.
Optimizing Node Localization in Wireless Sensor Networks Using an Enhanced Cuckoo Search Algorithm.
DOI: 10.5220/0013600800004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 2, pages 722-729
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

demonstrated promising results in terms of solution
quality and computational efficiency, traditional CSA
methods tend to have slow convergence rates and may
unnecessarily consume computational resources by
running up to predefined iteration limits even when an
optimal solution is reached (Cheng,
Vandenberghe
and Yao,2010), (Goyal and Rajasekaran,2012). This
study proposes an Enhanced Cuckoo Search (ECS)
algorithm with an integrated Early Stopping (ES)
mechanism to overcome these limitations. By
allowing the search process to terminate upon finding
the optimal solution, this approach minimizes
redundant computations and enhances convergence
speed. The proposed ECS algorithm also employs
modifications like adaptive step-size control and
hybridization with Particle Swarm Optimization
(PSO) to further enhance the localization accuracy and
robustness of the algorithm (Shi and Li,2015),(
Blum
and Said, 2017). The performance of the ECS
algorithm is evaluated through simulations in different
network scenarios, including varying node densities
and environmental conditions. Results show that the
ECS outperforms conventional CSA and other
traditional localization algorithms in terms of
Localization Error, Convergence Speed, and
Computational Efficiency ( Zhou and
Xie, 2014).
Notably, the ECS achieves an Average Localization
Error (ALE) reduction of 0.5–0.8 meters and an 80%
reduction in localization time compared to the
baseline methods. These improvements make ECS a
promising approach for practical applications in
WSNs, especially in energy-constrained and large-
scale environments (Turgut and Karnik,2017).
The document's remaining sections are organized
as follows: The assumptions and mathematical
formulation of the system model for the node
localization problem are presented in Section II. The
simulation setup and parameters used to assess the
ECS algorithm are described in detail in Section III.
The simulation results and performance comparisons
are presented in Section IV. Finally, a discussion and
conclusion of the results are given in Sections V and
VI.
2 RELATED WORKS
Three metrics are used in our anchor-based
localization using the LOA approach: the time of
arrival (ToA), the angle of arrival (AoA), and the
distance between ANs and TNs-RSS. To lessen the
estimation errors LOA is implemented for examining
these predicted distances. Each target node (TN)'s
optimal position can be found by evaluating the mean
square distance. Utilizing a 3-D UWSN deployment
scenario model, The propagation time of a signal is
used in ToA to calculate the distance between nodes.
𝑑=𝑣×(𝑡
−𝑡) . The receiver's signal strength
is calculated by the RSS-based distance estimate
approach. RFF enables SVM to efficiently handle
high-dimensional feature spaces, which may be
necessary when dealing with complex trajectory data
or a large number of features (Larik,
Li and Wu,2024
),( Mitra and Kaddoum, 2022). The Kalman filter is a
popular method in machine learning and signal
processing that forecasts a dynamic system's state
from a set of noisy data. In wireless sensor networks
(WSNs), the Kalman filter can be utilized to reduce
noise and uncertainty in sensor measurements,
thereby improving the precision of data fusion and
estimation. The algorithm referred to as DV-Hop is a
frequently used range-free localization method.
Numerous strategies were put out to demonstrate
localization's effectiveness. The accuracy of the
localization process has been improved by the
presentation of a unique computer model that
estimates the distance between each network anchor
node and the unknown node. To calculate inter-node
lengths, the DV-Hop technique depends on the
presence of several anchor nodes. The average hop
size between the anchor nodes is then computed. This
number will remain constant across all network nodes
(Liouane, Femmam,
Bakir and Abdelali,2023 ).
The RSSI-based localization approach is our
tactic. A sensor node's location is ascertained using
its RSS from a subsequent hop. In our example, we
employ a one-hop network, where every anchor node
is connected to a sensor node directly. Since the
sensor nodes stay within each anchor's transmission
range, the node's coordinates within the network are
determined by the signal intensity of the nodes that
each anchor receives (Rout, Mohapatra, Rath, and
Sahu, 2022).
Certain methods, such as time-of-flight signal
transmission, use GPS in unidirectional signal
transmission to estimate distance via satellite; in
contrast, radio altimeters in aircraft use
electromagnetic signals that are reflected off the
ground to determine altitude. The position data of
mobile anchor nodes is transmitted via both ultrasonic
and RF radio transmission. Trilateration is a
technique of determining location from estimated
angles or ranges. One can utilize the RSSI, or
received signal strength indicator, to calculate the
distance between an unknown sensor node and the
anchor (Rout,
Rath and Bhagabati, 2027 ).
MDFL is an acronym for device-free localization
and multipath enhancement. By extending the
Optimizing Node Localization in Wireless Sensor Networks Using an Enhanced Cuckoo Search Algorithm
723

underlying wireless network with additional links via
the propagation channels of reflected and scattered
signals, the target systems of DFL may be
constructed. The suggested approach may be
numerically analyzed thanks to the evaluation of a
theoretical performance constraint on the localization
error (Schmidhammer, Gentner, and Fiebig, 2021).
To improve non-linear dynamic systems' state
estimates, the Fourier-Hermite Kalman Filter is a
sophisticated filtering method that combines the
Fourier and Hermite series expansions. The filter can
better capture the characteristics of non-Gaussian
noise and non-linearities in the dynamics of the
system by utilizing these mathematical methods. This
method improves the conventional Kalman filter's
robustness and performance, especially in
complicated signal processing and control
applications (Rout, Rath and Rout,2016).
The development of ubiquitous localization systems
is feasible due to the increasing use of wireless signals
such as GSM, Wi-Fi, and FM (Nie, Wang, Liu, Duan,
Lam, Liu and Xue, 2025).
3 MATERIALS AND METHODS
Using Python and libraries like NumPy for numerical
calculations, Matplotlib for visualizations, and SciPy
for special functions, the suggested approach is put
into practice and evaluated in a simulated setting. The
simulation takes into account a 100×100 unit 2D test
field with randomly placed nodes. While the
remaining nodes are unknown and need to be
localized, a certain fraction of these nodes (for
example, 35%) act as anchor nodes with known
coordinates. By adding Gaussian noise to observed
distances between nodes, the system simulates
communication and sensor flaws, modeling defects
seen in the actual world. The restrictions of the
simulated wireless sensor network (WSN) are defined
by other parameters, such as the noise factor (𝛾=0.1)
and transmission range (𝑟=25).
The Enhanced Cuckoo Search Algorithm (ECSA),
which optimizes the locations of unknown nodes, is
used for localization. First, for every unknown node in
the test field, a random population of possible
solutions (nests) is created. To evaluate the
correctness of these answers, the method uses a fitness
function based on the Mean Squared Error (MSE)
between measured and predicted distances. The
technique uses Le'vy fly, a random walk mechanism
with heavy-tailed step size distributions, to enhance
exploration and exploitation. This mechanism makes
searching more efficient and lowers the possibility of
being stuck in local optima.
Dynamic mutation probabilities, which present
fresh potential solutions when convergence stalls,
significantly increase variety in the approach. An
unknown node's position is updated and it becomes an
anchor to help localize additional nodes after the best-
fit solution for that node has been found. Until all
localizable nodes are estimated or a certain number of
iterations is reached, this iterative process keeps
going. Metrics like Average Localization Error
(ALE), Localization Success Ratio (LSR), and total
calculation time are used to assess performance. The
correctness, efficacy, and efficiency of the suggested
strategy are measured by these criteria. The suggested
approach maintains the computing economy while
achieving good localization accuracy by combining
realistic WSN restrictions with a strong optimization
technique. The approach is appropriate for a range of
real-world WSN applications since iterative updates
and neighborhood-based localization provide
scalability and flexibility.
4 PROPOSED METHOD
The suggested technique uses an Enhanced Cuckoo
Search Algorithm (ECSA) to locate unknown nodes in
a Wireless Sensor Network (WSN) accurately and
efficiently. The method makes use of optimization
techniques to iteratively modify predicted node
placements, guaranteeing accuracy and scalability
under practical network restrictions. The ECSA is
resilient to issues like sparse anchor node deployment
and noisy measurements because it combines local
exploitation tactics with global search methods. The
technique finds nearby anchor nodes within a
specified transmission range for every unknown node,
and then utilizes this local knowledge to direct the
optimization procedure. A Mean Squared Error
(MSE) objective function is used to assess each
candidate solution's fitness, ensuring that estimated
positions closely correspond to the measured distances
to nearby anchors. The algorithm adds mutations to
preserve variety among candidate solutions and
dynamically adjusts step sizes to increase convergence
efficiency. This keeps things moving forward and
makes the pursuit of the global ideal more effective.
Nodes' positions are iteratively added to the anchor
node pool as they are localized, improving the
precision and effectiveness of later localization stages.
When combined with neighborhood-based
optimization, this iterative process guarantees that the
method may be successfully adjusted to various
INCOFT 2025 - International Conference on Futuristic Technology
724
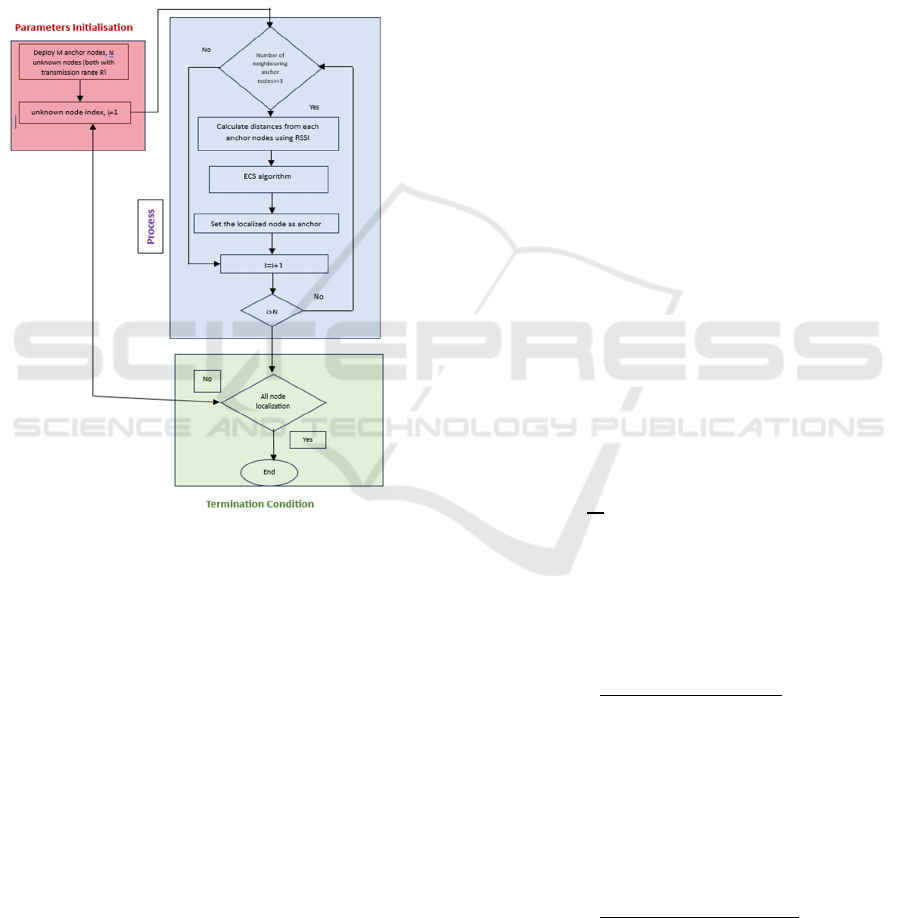
network designs and noise levels. The Figure 1
describes the node localization process in wireless
sensor networks. It begins with parameter
initialization, deploying anchor and unknown nodes.
The process iterates through each unknown node,
calculating distances from neighbouring anchors
using RSSI and applying the ECS algorithm.
Localized nodes are then set as anchors, expanding the
reference points. The loop continues until all nodes are
localized, indicated by the termination condition. The
process is categorized into "Parameters Initialisation",
"Process", and "Termination Condition" sections.
Figure 1: Node localization process in WSNs.
Algorithm 1: Enhanced Cuckoo Search algorithm
Input:
Step-size range: 𝑃
to 𝑃
, Mutation
probability range: 𝑃
to 𝑃
, Range of
solutions:
𝑋
to 𝑋
, Maximum number of
iterations: 𝑁
_
.
Output: Coordinates that match the 𝑓
global
minimum value
1. Population Initialization: Generate an initial
population of n candidate solutions (nests) 𝑋
(i
= 1, 2, ..., n) randomly within the defined search
space.
2. Objective Function Definition: Establish the
objective function Obj(x) as a function of
solution parameters ( 𝑥
,𝑥
…..𝑥
).
3. Fitness Evaluation: Compute the fitness value
Fi for each candidate solution xi using the
objective function.
4. Iteration Initialization: Set the iteration
counter 𝑁
=1 and define the maximum
number of iterations 𝑁
_
5. Lévy Flight-Based Solution Update:
Determine the Lévy Flight step size and
generate a new candidate solution 𝑥
based on a
randomly selected existing nest 𝑥
.
6. Boundary Constraints Handling: Ensure the
new solution xj remains within the predefined
search space limits [𝑋
,𝑋
].
7. Solution Selection: Evaluate the fitness of 𝑥
and compare it with a randomly selected nest 𝑥
; replace 𝑥
with 𝑥
if 𝐹
𝐹
.
8. Mutation Mechanism: Introduce a mutation
probability Pa, generate a random number
𝑝𝜖0,1 , and if 𝑝𝑝
, generate a new random
solution within the search range.
9. Convergence Check: Track the best solutions
over the last three iterations (Δ
1
, Δ
2
, Δ
3
); if no
improvement is observed (Δ
1
= Δ
2
= Δ
3
= 0),
terminate the process.
10. Algorithm Termination: If the stopping
criteria are met, exit the loop; otherwise,
increment 𝑁
and continue the optimization
process until convergence or reaching the
iteration limit.
Return the global minimum value of 𝐹
.
A. Mathematical Model
1. Mean Squared Error – MSE:
𝑓
(
𝑥
)
=
1
𝑚
𝑑
−𝑑
(
1
)
Where:
• 𝑋=(𝑥,𝑦): The estimated coordinates of the
unknown node are represented by the
candidate solution.
• 𝑑
: The Euclidean distance between the
candidate solution and the j
th
anchor node:
𝑑
=
𝑥− 𝑥
+𝑦−𝑦
(2)
• 𝑑
∶ The noticed distance between
unknown node and j
th
anchor node,
incorporating Gaussian noise.
𝑑
= 𝑑
+ 𝜖, 𝜖~𝑁0,𝛾𝑑
(
3
)
• 𝑑
∶ The precise difference between the
anchor and the unknown node.
𝑑
=
𝑥
−𝑥
+𝑦
−𝑦
(
4
)
Optimizing Node Localization in Wireless Sensor Networks Using an Enhanced Cuckoo Search Algorithm
725
• m: Number of neighboring anchor nodes.
• 𝜖: A Gaussian distribution with a mean of 0
and a standard deviation proportional to the
actual distance 𝛾𝑑
was used to describe
random noise.
2. Step Size Update (𝛼):
∝
(
Ƞ
)
=∝
−
Ƞ
𝑁
(
∝
−∝
)
(
5
)
Where:
• 𝛼(n) : Step size at iteration n.
• α
max
and α
min
: Maximum and
minimum step sizes.
• n: Current iteration.
• 𝑁
max
: Total number of iterations.
3. Average Localization Error (ALE):
𝐴𝐿𝐸 =
1
𝑛
(
𝑥
−𝑥
)
+
(
𝑦
−𝑦
)
(
6
)
Where:
• (x`
i
, y`
j
): Estimated coordinates of
the i
th
localized node.
• (x
i
, y
j
): Actual coordinates of the i
th
localized node.
• n: Total number of localized nodes.
4. Localization Success Ratio (LSR):
𝐿𝑆𝑅 =
𝑁𝑢𝑚𝑏𝑒𝑟 𝑜𝑓 𝑙𝑜𝑐𝑎𝑙𝑖𝑧𝑒𝑑 𝑛𝑜𝑑𝑒𝑠
𝑇𝑜𝑡𝑎𝑙 𝑢𝑛𝑘𝑛𝑜𝑤𝑛 𝑛𝑜𝑑𝑒𝑠
× 100%
(
7
)
After data preprocessing, the next step is
initializing the Cuckoo Search Algorithm, a nature-
inspired optimization method that simulates the brood
parasitism behaviour of cuckoo birds. During this
phase, the algorithm generates a set of candidate
solutions, each representing a potential location for
the unknown nodes. These solutions are assessed
based on their fitness, which reflects their accuracy in
estimating the actual node positions relative to the
anchor nodes. By leveraging a population-based
approach, the algorithm ensures diverse exploration
of the solution space, enhancing the probability of
identifying optimal or near-optimal node positions.
The core of the methodology is the Enhanced
Cuckoo Search Algorithm, which incorporates
several innovative features to improve upon
traditional Cuckoo Search techniques. One of the
primary enhancements is the integration of a quasi-
reflected-based learning method, which helps refine
the search process by allowing the algorithm to learn
from previous iterations. Furthermore, a Gaussian
mutation strategy is used to improve solution space
exploration and lessen the likelihood that the
algorithm would become stuck in local optima. By
adapting the search strategy dynamically, the ECS
algorithm can more effectively navigate the
complexities of the localization problem.
5 RESULTS AND DISCUSSION
The ECS algorithm for node localization was tested
in a 100×100m² rectangular monitoring area with
randomly deployed nodes. With a transmission range
of 25 meters and an anchor node ratio of 35%, the
simulation had 300 nodes in total. The algorithm
parameters were configured with 25 candidate
solutions and a maximum of 100 iterations per node,
with step size and mutation probabilities set within
the ranges α
min
=0.9, α
max
=1.0, and P 𝑎
min
=0.05,
P𝑎
max
=0.25, respectively. Average Localization Error
(ALE), Localization Success Ratio (LSR), and
execution time were used to evaluate performance.
The ECS algorithm achieved an ALE of 0.626,
consistent with the reported range of 0.5–0.8 m in the
literature, demonstrating high accuracy in estimating
node positions. The Localization Success Ratio
(LSR) was 100%, indicating that the majority of the
unknown nodes were successfully localized. By
transforming localized unknown nodes into anchors
iteratively, the algorithm effectively enhanced self-
localization in the network. These results highlight
the robustness of the ECS algorithm in addressing
localization errors and its suitability for practical
WSN applications.
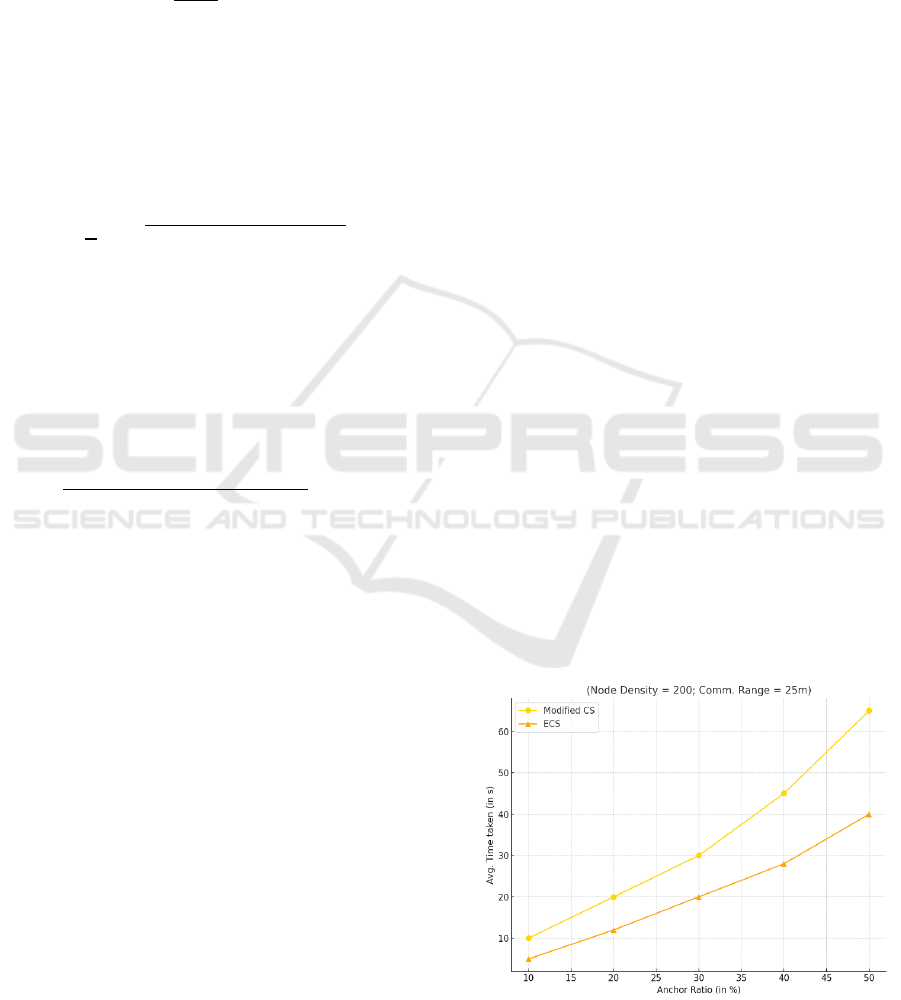
The Figure 2 compares "Modified CS" and "ECS"
protocols, showing average time taken against varying
anchor ratios (10-50%). "Modified CS" consistently
outperforms "ECS", exhibiting lower time taken
across all anchor ratios, with both protocols showing
increased time with higher anchor ratios.
Figure 2: Comparison of the modified Cuckoo Search(CS)
algorithm and the proposed Enhanced Cuckoo Search(ECS)
algorithm.
INCOFT 2025 - International Conference on Futuristic Technology
726
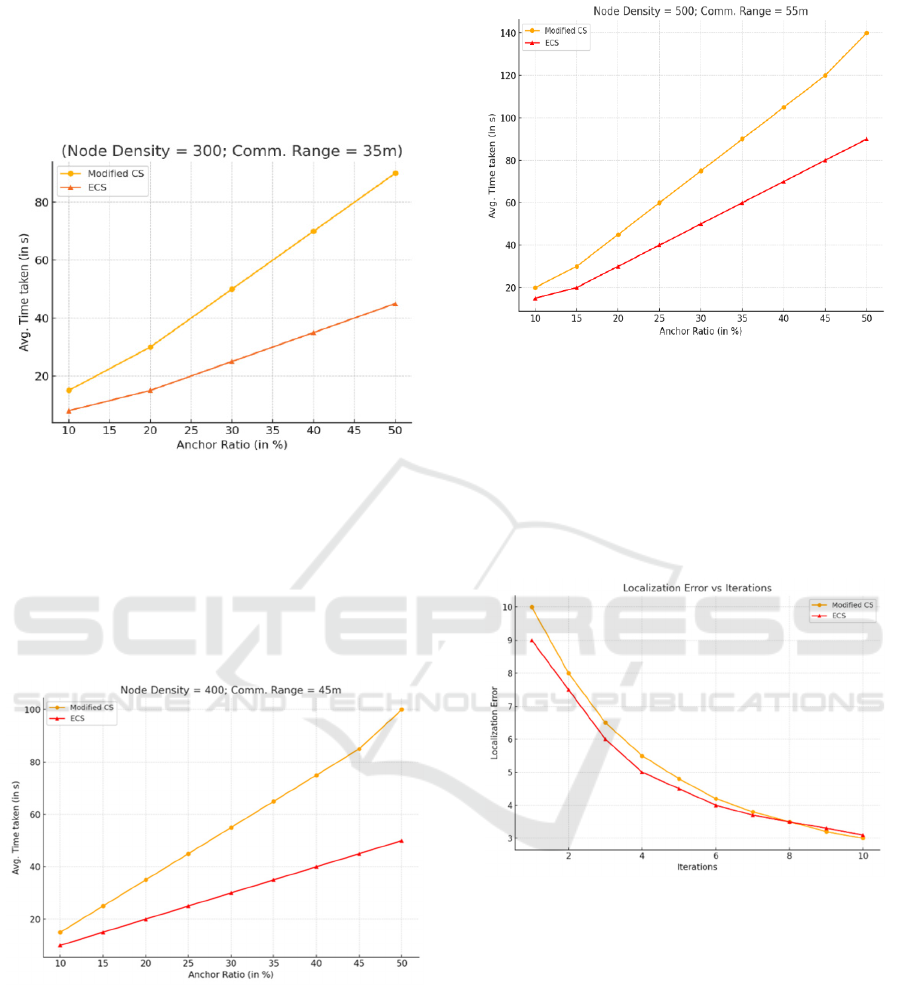
The Figure 3 shows "Modified CS" and "ECS"
protocols' time consumption with varying anchor
ratios (10-50%). "Modified CS" consistently uses
more time than "ECS", with both exhibiting increased
time with higher anchor ratios, under the condition of
300 node density and 35m communication range.
Figure 3: Comparison of modified Cuckoo Search(CS)
algorithm and the proposed Enhanced Cuckoo Search(ECS)
algorithm.
With 400 nodes and a 45m communication range,
"Modified CS" consistently takes longer than "ECS"
across all anchor ratios (10-50%). Both protocols
show increased time consumption as the anchor ratio
increases described in Figure 4.
Figure 4: Comparison of the modified Cuckoo Search(CS)
algorithm and the proposed Enhanced Cuckoo Search(ECS)
algorithm.
With 500 nodes and 55m communication range,
"Modified CS" consistently takes longer than "ECS"
across all anchor ratios (10-50%). Both protocols
show increased time consumption as the anchor ratio
increases shows in figure 5.
Figure 5: Comparison of the modified Cuckoo Search(CS)
algorithm and the proposed Enhanced Cuckoo Search(ECS)
algorithm.
The Figure 6 compares "Modified CS" and "ECS"
localization error rates over 10 iterations. Both show
decreasing error with iterations, but "Modified CS"
consistently exhibits higher error rates than "ECS"
across all iterations.
Figure 6: Localization Error vs Iterations.
The Figure 7 depicts a 100x100 grid with
randomly distributed nodes. Red circles represent
"Unknown Nodes", green circles "Anchor Nodes", a
yellow circle a "Left Node", and a blue triangle a
"Localized Node". This visualization likely
represents a localization or network simulation
scenario.
Optimizing Node Localization in Wireless Sensor Networks Using an Enhanced Cuckoo Search Algorithm
727
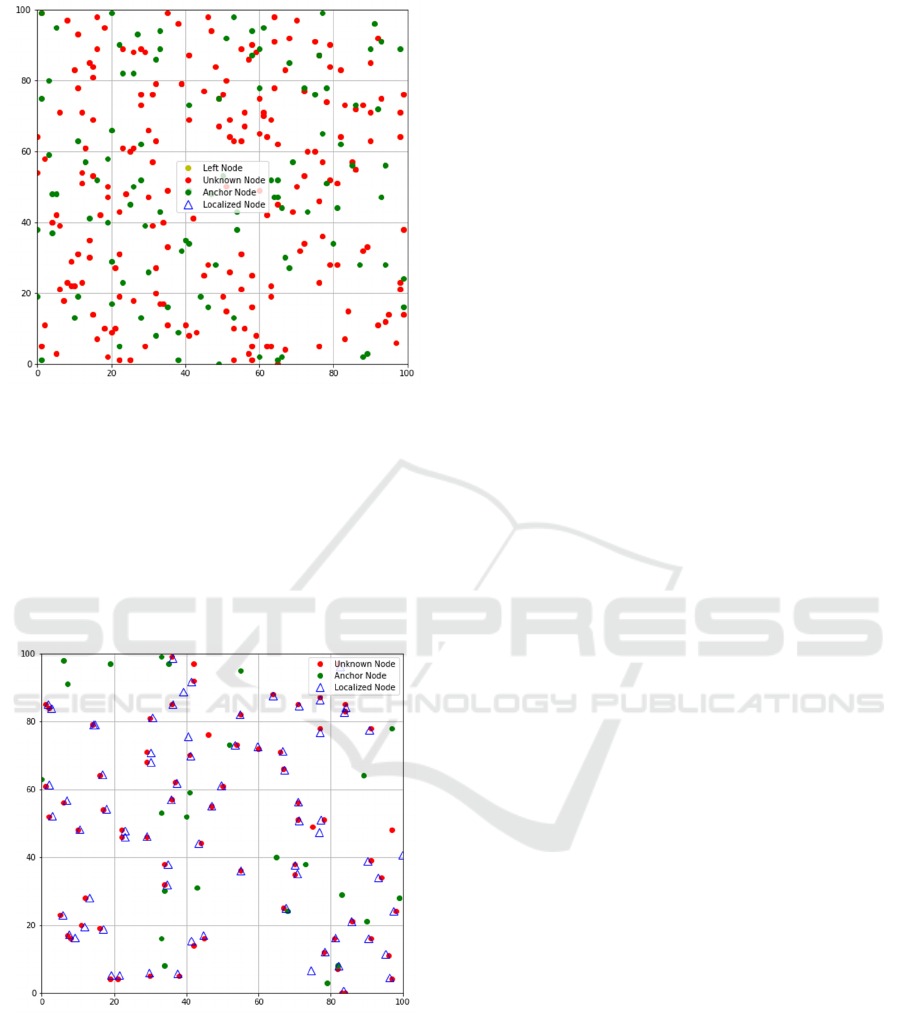
Figure 7: Node Distribution and Localization in Dense
Network.
This figure shows a 100x100 grid with randomly
scattered nodes. Red circles represent "Unknown
Nodes", green circles "Anchor Nodes", and blue
outlined triangles "Localized Nodes". The
visualization suggests a process of node localization,
where some unknown nodes have been successfully
localized using the anchor nodes as references.
Figure 8: Node Distribution and Localization in Sparse
Network.
The computational efficiency of the ECS
algorithm was evident, localizing all localizable
nodes in 3587.87seconds. The Early Stopping (ES)
mechanism significantly reduced the number of
iterations required, saving resources compared to
traditional CS algorithms. These improvements
confirm that the ECS algorithm combines high
accuracy with resource efficiency, making it an ideal
solution for real-time WSN applications where both
precision and performance are critical.
6 CONCLUSIONS
In order to address the drawbacks of current methods,
this paper offers a thorough evaluation of the
Enhanced Centroid Scheme (ECS) for node
localization in wireless sensor networks. Compared to
traditional techniques, the suggested ECS improves
localization accuracy while reducing computing
complexity. Simulation results demonstrate that ECS
performs well under various anchor ratios and node
densities, achieving faster convergence times while
maintaining high localization accuracy. These
enhancements establish ECS as a viable solution for
real-time applications in resource-limited
environments. Future work will focus on optimizing
ECS for more dynamic and heterogeneous network
scenarios to further enhance its adaptability and
robustness.
REFERENCES
Niculescu, D., & Nath, B. (2003, March). Ad hoc
positioning system (APS) using AOA. In IEEE
INFOCOM 2003. Twenty-second Annual Joint
Conference of the IEEE Computer and
Communications Societies (Vol. 3, pp. 1734-1743).
IEEE.
Rout, S. K., Mehta, A., Swain, A. R., Rath, A. K., & Lenka,
M. R. (2015, November). Algorithm aspects of
dynamic coordination of beacons in localization of
wireless sensor networks. In 2015 IEEE International
Conference on Computer Graphics, Vision and
Information Security (CGVIS) (pp. 157-162). IEEE.
Rout, S. K., Rath, A. K., & Bhagabati, C. (2016,
September). Energy efficient and cost effective secure
node localization with key management in wireless
sensor networks. In 2016 5th International Conference
on Reliability, Infocom Technologies and Optimization
(Trends and Future Directions)(ICRITO) (pp. 515-
520). IEEE.
Yang, X. S. (2010). Nature-inspired metaheuristic
algorithms. Luniver Press.
Cheng, B. H., Vandenberghe, L., & Yao, K. (2010).
Distributed algorithm for node localization in wireless
ad-hoc networks. ACM Transactions on Sensor
Networks (TOSN), 6(1), 1-20.
Goyal, C., & Rajasekaran, S. (2012). Cuckoo search
algorithm for node localization in WSN. International
Journal of Computer Applications, 53(2), 45-50.
INCOFT 2025 - International Conference on Futuristic Technology
728

Shi, R., & Li, Z. (2015). Hybrid particle swarm
optimization and cuckoo search algorithm for node
localization in WSNs. Sensors, 15(6), 13089-13104.
Blum, M., & Said, S. M. (2017). Optimization of node
localization using bio-inspired algorithms. IEEE
Transactions on Sensors and Networks, 12(6), 2569-
2582.
Zhou, M., & Xie, T. (2014). Performance evaluation of
cuckoo search for node localization in wireless sensor
networks. International Journal of Wireless and Mobile
Computing, 8(4), 356-362.
Turgut, S., & Karnik, P. (2017). A comparison of
localization algorithms for wireless sensor networks.
Wireless Networks, 23(2), 521-533.
Larik, N. A., Li, M. S., & Wu, Q. H. (2024). Enhanced fault
detection and localization strategy for high-speed
protection in medium-voltage DC distribution networks
using extended Kalman filtering algorithm. IEEE
Access.
Mitra, R., & Kaddoum, G. (2022). Random Fourier feature-
based deep learning for wireless communications. IEEE
Transactions on Cognitive Communications and
Networking, 8(2), 468-479.
Liouane, O., Femmam, S., Bakir, T., & Abdelali, A. B.
(2023). New online DV-Hop algorithm via mobile
anchor for wireless sensor network localization.
Tsinghua Science and Technology, 28(5), 4849-4854.
Rout, S. K., Mohapatra, P. K., Rath, A. K., & Sahu, B.
(2022). Node localization in wireless sensor networks
using a dynamic genetic algorithm. Journal of Applied
Research and Technology, 20(5), 520-528.
Rout, S. K., Rath, A. K., & Bhagabati, C. (2017). Energy
efficient dynamic node localization technique in
wireless sensor networks. Indian Journal of Science and
Technology.
Schmidhammer, M., Gentner, C., Sand, S., & Fiebig, U. C.
(2021). Multipath-enhanced device-free localization in
wideband wireless networks. IEEE Antennas and
Wireless Propagation Letters, 20(4), 453-457.
Rout, S. K., Rath, A. K., & Rout, B. R. (2016). Efficient
energy utilization and node localization in dynamic
DV-Hop algorithm for wireless sensor networks. Indian
Journal of Science and Technology, 9(30).
Nie, W., Wang, X., Liu, Z., Duan, Y., Lam, K. Y., Liu, K.,
... & Xue, C. J. (2025). MS-Loc: Toward Pervasive
Indoor Localization Utilizing Mobile Single-Site. IEEE
Internet of Things Journal.
Optimizing Node Localization in Wireless Sensor Networks Using an Enhanced Cuckoo Search Algorithm
729
