
Mobile Network Driven Limitless Range Telemetry System for
Autonomous UAVs
Chandresh Menon
1
, Tanishq Shinde
1
Saurabh Kaduskar
2
, Sarthak Varma
2
and Soham Suryawanshi
2
1
Department of Computer Engineering, Agnel Charities Fr. C. Rodrigues Institute of Technology, Vashi, Navi Mumbai,
India
2
Department of Electrical Engineering, Agnel Charities Fr. C. Rodrigues Institute of Technology, Vashi, Navi Mumbai,
India
Keywords:
4G, Reliability, Mobile Networking, MAVLink, VPN, Telemetry, Companion Computer.
Abstract:
This paper introduces an advanced telemetry system for autonomous UAVs using the MAVLink protocol and
secure VPN tunneling to communicate with ground control stations via 4G mobile networks. By leveraging
mobile infrastructure, the system achieves extended range for real-time data transmission and control, over-
coming traditional radio frequency limitations. The integration of VPN ensures a secure and private communi-
cation channel, while 4G connectivity enables reliable and low-latency operations. Extensive testing confirms
its effectiveness for applications in surveillance, environmental monitoring, and logistics. These characteris-
tics provide a distinct advantage in dense urban environments in terms of cost, interference susceptibility, and
range.
1 INTRODUCTION
The convergence of unmanned aerial vehicles (UAVs)
with advanced communication networks presents a
transformative opportunity for communication and
innovation. Advanced communication networks of-
fer ultra-high bandwidth, low latency, and massive
network capacity, while UAVs provide flexible aerial
platforms. This combination has the potential to rev-
olutionize various sectors, from enhancing connectiv-
ity in underserved areas to enabling real-time mon-
itoring and data collection in diverse applications.
(Wazid, et al. 2020), (Mishra, et al. 2020), (Festag, et
al. 2021)
This paper explores a 4G-based VPN Powered
telemetry system as a robust alternative to traditional
radio frequency-based communication for UAVs. It
highlights the advantages of the proposed system, in-
cluding enhanced range, reduced susceptibility to in-
terference, and cost-effectiveness in dense urban en-
vironments. A detailed performance study evaluates
the system across various parameters, showcasing its
performance and reliability. The design and working
principles of the demonstrator platform are presented
to illustrate the practical implementation. Based on
the findings and unique traits of this system, the paper
identifies key application areas where this technology
offers significant advantages, such as urban surveil-
lance, logistics, and environmental monitoring. (Jin,
et al. 2021), (Hassija, et al. 2021), (Fakhreddine, et
al. 2022), (Pocovi, et al. 2018)
2 EASE OF USE
The proposed system is designed with ease of use
as a central focus, ensuring seamless integration into
existing UAV workflows. By utilizing widely avail-
able 4G mobile networks and standard VPN configu-
rations, the system eliminates the need for specialized
hardware or complex setup processes associated with
traditional radio frequency systems. Its plug-and-
play architecture simplifies deployment, while intu-
itive connectivity through VPN tunneling ensures se-
cure and reliable communication with minimal oper-
ator intervention. Our system enables operators to
securely control multiple drones simultaneously from
anywhere in the world, leveraging the flexibility of 4G
connectivity and VPN tunneling. A custom-designed
graphical user interface (GUI) provides an intuitive
and user-friendly platform for managing UAV oper-
ations. This streamlined approach not only reduces
operational complexity but also enables rapid scala-
702
Menon, C., Shinde, T., Kaduskar, S., Varma, S. and Suryawanshi, S.
Mobile Network Driven Limitless Range Telemetry System for Autonomous UAVs.
DOI: 10.5220/0013600400004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 2, pages 702-707
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

bility across diverse applications, making it an acces-
sible and practical solution for both novice and expe-
rienced UAV operators. (Bakirci, 2023), (Zulkifley, et
al. 2021), (Gorrepati and Guntur 2021)
3 CONCEPT
Figure 1: System Architecture
The above figure 1 illustrates a user-friendly UAV
system leveraging 4G networks and VPNs to elim-
inate specialized hardware and complex setups. Its
plug-and-play design ensures easy deployment, while
secure tunneling enables reliable multi-drone control
globally. A custom GUI simplifies operations, reduc-
ing complexity and enhancing scalability for all users.
4 COMMUNICATION
PROTOCOLS
4.1 VPN (Virtual Private Network)
A Virtual Private Network (VPN) is a technology that
establishes a secure and encrypted connection over a
less secure network, such as the Internet. VPNs are
widely used to protect private data, provide secure re-
mote access to systems, and ensure privacy by mask-
ing the user’s IP address. In our Internet-based drone
system, VPN is utilized to enhance security, privacy,
and accessibility:
1. Secure Remote Access: A VPN ensures en-
crypted communication between the ground con-
trol station and the drone, protecting it from unau-
thorized access.
2. IP Masking and Privacy Protection: The VPN
hides the IP addresses of both the drone and the
ground control station, safeguarding the drone’s
location and data from potential attackers.
3. Improved Reliability: Using a VPN server helps
prevent disruptions caused by network instability
or interference, maintaining a stable connection.
4. Centralized Network Management: A VPN al-
lows multiple drones to securely connect to a cen-
tral server, enabling efficient management and co-
ordination of drone operations from the ground.
4.2 MAVLink (Micro Air Vehicle
Communication Protocol)
MAVLink (Micro Air Vehicle Communication Pro-
tocol) is a lightweight messaging protocol designed
for communication between unmanned aerial vehicles
(UAVs), ground control stations (GCS), and onboard
systems. It is widely used in the drone ecosystem due
to its efficiency, flexibility, and scalability. MAVLink
supports both telemetry and command-and-control
functionalities, enabling seamless communication in
UAV systems.
1. Multi-Channel Communication: MAVLink
supports communication over multiple channels,
such as serial, UDP, and TCP. This enables flex-
ibility in the choice of communication mediums,
whether over wired or wireless networks.
2. Heartbeat Mechanism: The protocol includes a
heartbeat message that is periodically exchanged
between the UAV and GCS. This mechanism en-
sures that the connection is active and helps in de-
tecting link failures promptly.
3. Extensibility: MAVLink allows the addition of
custom message definitions, enabling developers
to extend the protocol to suit specific application
requirements without compromising compatibil-
ity with existing systems.
4. Real-Time Data Exchange: The protocol facili-
tates real-time exchange of telemetry data, includ-
ing GPS coordinates, battery status, attitude, and
sensor readings, enabling precise monitoring and
control of the UAV.
5. Command and Control: MAVLink supports
sending commands such as takeoff, landing, way-
point navigation, and parameter updates, enabling
comprehensive control over UAV operations from
the GCS.
Mobile Network Driven Limitless Range Telemetry System for Autonomous UAVs
703

5 IMPLEMENTATION OF THE
PROPOSED COMMUNICATION
SYSTEM
The proposed communication system leverages 4G
connectivity and VPN integration to establish a se-
cure communication channel between the drone and
the ground control station (GCS). The implementa-
tion steps are detailed as follows:
5.1 Establishing Internet Connectivity
through 4G
The Raspberry Pi (RPI) onboard the drone was con-
figured to connect to the internet using a 4G portable
hotspot. The 4G network provides reliable internet
access in areas covered by cellular networks, ensur-
ing long-range communication capabilities.
5.2 Setting Up a VPN for a Secure
Private Network
To establish a private communication channel, both
the RPI and the ground control laptop (GCS) were
connected to the same Virtual Private Network
(VPN). The following steps were taken:
1. VPN Client Installation: A VPN client was in-
stalled and configured on both devices to ensure
secure connectivity.
2. VPN Server Configuration: A centralized VPN
server was set up to manage connections, assign-
ing unique private IPs to the devices.
This configuration created a virtual local network, al-
lowing seamless communication between the drone
and the GCS while maintaining data security.
5.3 Enabling Data Transmission using
TCP and MAVLink Protocol
Telemetry data and commands were transmitted us-
ing:
• Transmission Control Protocol (TCP): Ensures
reliable and ordered data delivery.
• MAVLink Protocol: A lightweight communica-
tion protocol designed for UAVs.
The VPN-assigned IP address of the RPI was used as
the endpoint for accessing telemetry data and sending
commands. Furthermore, TCP facilitated both unicast
and multicast of MAVLink messages:
1. Unicast and Multicast: TCP allows the distribu-
tion of MAVLink messages to multiple ports. For
instance, if the RPI’s VPN IP is 10.8.0.5, it can
transmit messages to ports specified by the user,
such as 14441, 14442, and so on.
2. Scalable Access: This setup enables multiple
ground control stations or tools to access the
drone’s data and commands simultaneously.
5.4 Configuring Ground Control Access
The ground control laptop (GCS) was configured to
use the RPI’s VPN IP address for communication
with the drone. Key functionalities include:
1. Real-Time Monitoring: Operators can monitor
telemetry data, including position, altitude, bat-
tery status, and video streams, in real time.
Figure 2: Real-Time Video Stream
Figure 2 illustrates a snapshot of a live video
stream captured just before landing. The video
streaming is facilitated through a VPN using
WebRTC, ensuring secure and reliable transmis-
sion. These streams are globally accessible to any
client connected to the VPN, enabling real-time
monitoring from remote locations.
2. Command Transmission: Commands such as
takeoff, waypoint navigation, and landing can be
sent securely via the VPN.
The integration of TCP and the VPN ensured low la-
tency and reliable data exchange between the drone
and the GCS.
This implementation demonstrates the integration of
4G and VPN technologies to establish a robust and se-
cure communication system for drones, enabling re-
mote operations over long distances with scalable ac-
cess to MAVLink data.
INCOFT 2025 - International Conference on Futuristic Technology
704
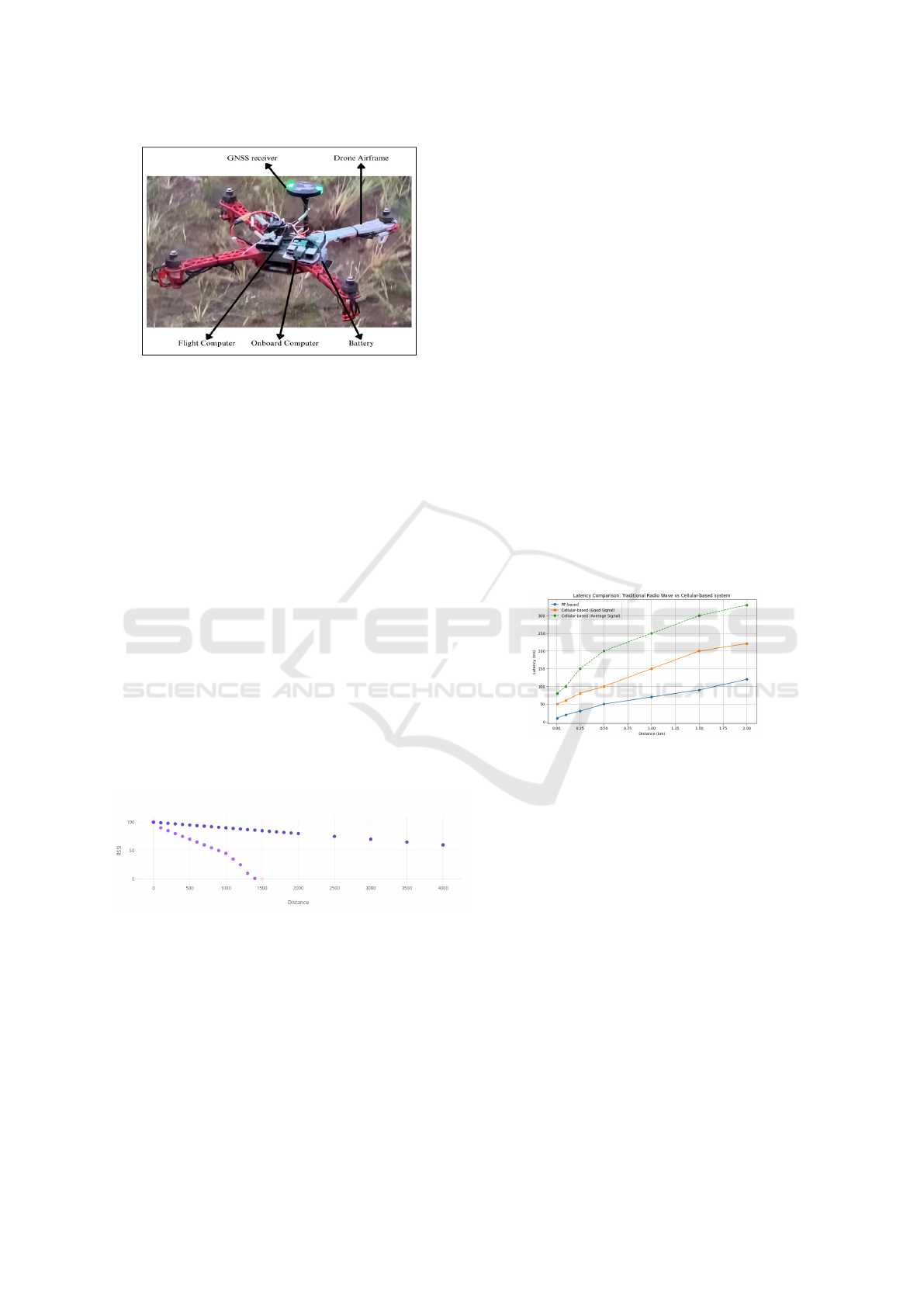
Figure 3: UAV Demonstrator
6 PERFORMANCE ANALYSIS
6.1 Range
• Mobile Network-Based System The 4G based
system offers worldwide coverage, relying on cel-
lular network availability. Its signal strength de-
pends on the proximity to the cellular towers and
the level of network congestion, while the range is
practically unlimited within the areas covered by
the network.
• Conventional RF Telemetry System RF-based
systems have a range that depends on transmis-
sion power, frequency, antenna design, and envi-
ronmental conditions, with RSSI degrading loga-
rithmically due to path loss. Coverage is limited
by line of sight and obstructions, as signal strength
diminishes with distance and environmental fac-
tors. The effective range is typically up to 1–2 km
under ideal conditions, but is significantly reduced
by obstacles
Figure 4: Distance vs RSSI Graph
• Inference: From Figure 4, The mobile 4G
based telemetry system offers superior range and
consistent signal strength compared to the 433
MHz RF system, especially with existing cellular
infrastructure. Although the RF system provides
low-latency communication within a limited
range and ideal conditions, its performance
degrades rapidly with distance and obstructions.
In contrast, the mobile network system maintains
robust connectivity over vast distances.
6.2 Latency
• Mobile Network-Based System
Latency in cellular systems is influenced by en-
coding/decoding time, transmission time, and
processing delays, with typical values ranging
from 50 to 150 ms under ideal conditions to more
than 300 ms in weak signals. Distance also im-
pacts latency due to propagation delays and han-
dovers, with greater distances leading to slightly
higher latency.
• Conventional RF Telemetry System
Latency in RF systems depends on encod-
ing/decoding time, transmission time, and re-
ceiver processing delays, typically ranging from
10-50 ms for short ranges (0-100m) to 50–100ms
for medium ranges (100m–1km). Although dis-
tance has less impact at shorter ranges, increasing
distance can cause significant signal degradation
and retransmissions, adding to latency.
Figure 5: Distance vs Latency Graph
• Inference: Latency analysis from Figure 5
highlights the advantages and limitations of RF-
based and cellular-based telemetry systems over
varying distances. RF systems have lower latency
at short distances, starting at 10 ms compared to
50 ms for cellular systems, but the difference is
minimal. As distance increases, the latency gap
narrows, with RF reaching 120 ms and cellular
systems at 220–330 ms at 2 km, depending
on signal quality. This diminishing difference
makes cellular systems more advantageous for
longer ranges, offering reliable performance with
slightly higher latency.
6.3 Noise
Noise refers to unwanted disturbances that interfere
with the transmission signal, resulting in a reduction
Mobile Network Driven Limitless Range Telemetry System for Autonomous UAVs
705

in video quality and stability.
• Mobile Network-Based System Mobile net-
works, such as 4G and 5G, offer high-quality
video transmission with minimal noise due to
their error correction mechanisms and adaptive
bitrate control. These systems are well-suited
for long-range operations and maintain consistent
performance even in the presence of moderate in-
terference. They support high-definition video (up
to 4K), ensuring reliability across diverse environ-
ments.
• Conventional RF Telemetry System Analog
RF-based systems, such as the TS835, are more
prone to noise, which can cause the video to
become grainy and unstable. These systems
perform adequately over short distances with low
interference, but suffer significant degradation
in quality and reliability as distance increases.
Signal quality quickly decreases in areas with
high interference or weak signals, limiting their
effectiveness.
6.4 Additional Factors
1. Cost
Cellular telemetry systems are more cost-
effective, with a typical setup priced at $50, com-
pared to $200 for RF systems. This is due to the
use of existing mobile infrastructure and mass-
produced hardware, which reduces both initial
and long-term costs. RF systems, on the other
hand, require specialized equipment, leading to
higher expenses.
2. Ready To Operate
Cellular-based systems are plug-and-play, offer-
ing ease of use by simply connecting to exist-
ing mobile networks without requiring a com-
plex setup or configuration. This user-friendly
nature makes them ideal for quick deployment.
In contrast, RF systems require a more intricate
setup, including specific hardware configuration,
antenna alignment, and frequency management,
which can be time-consuming and challenging for
users, making them less convenient for everyday
use.
7 APPLICATIONS
The advanced telemetry system that leverages 4G mo-
bile networks and secure VPN tunneling offers sev-
eral compelling applications, particularly in urban ar-
eas where the mobile network infrastructure is robust.
In dense urban environments, where traditional RF-
based systems face significant challenges with signal
degradation and interference, this system can provide
a reliable and cost-effective solution for package de-
livery. The extensive mobile infrastructure reduces
operational costs, as it leverages existing cellular tow-
ers and networks, eliminating the need to set up dedi-
cated communication systems. Furthermore, with low
susceptibility to signal disturbances, this system en-
sures efficient real-time communication and control,
making it ideal for urban logistics and e-commerce
applications.
Another promising application is in scenarios
where off-site operation and monitoring of UAVs are
required. This system enables operators to control
and monitor UAVs from anywhere in the world, even
from different countries. For example, a UAV tasked
with monitoring infrastructure in a remote region
could be operated by an expert based in another coun-
try, providing flexibility and efficiency. This ability
to manage UAVs from distant locations expands the
potential for global collaborations, remote diagnos-
tics, and emergency operations, with minimal phys-
ical presence required on site.
In addition, the system is invaluable for indus-
trial surveys and disaster relief operations. In indus-
tries, UAVs can perform real-time inspections of ma-
chinery, pipelines, and construction sites, enhancing
safety and reducing manual effort. In disaster relief,
the system enables rapid deployment, live situational
awareness, and supply delivery, ensuring efficient co-
ordination even in challenging environments. Its se-
cure, low-latency communication supports critical op-
erations seamlessly.
8 CONCLUSION
In conclusion, this study has introduced and suc-
cessfully implemented a 4G-based telemetry system
for autonomous UAVs, leveraging the MAVLink pro-
tocol and VPN integration to enable secure, reli-
able, and low-latency communication. The pro-
posed system demonstrates clear advantages over tra-
ditional RF-based systems by extending operational
range, enhancing communication security, and ensur-
ing robust performance in dense urban environments.
The integration of a Raspberry Pi onboard, coupled
with seamless connectivity to a ground control sta-
tion through mobile infrastructure, offers unparalleled
flexibility for global remote control and monitoring.
Extensive testing validates the suitability of the sys-
tem for critical applications such as surveillance and
INCOFT 2025 - International Conference on Futuristic Technology
706

logistics. These innovations establish a versatile and
scalable platform that meets the evolving demands of
modern drone operations, paving the way for future
advancements in drone technology.
ACKNOWLEDGMENT
The authors would like to express their sincere grat-
itude to Mr. Mritunjay Ojha, Assistant Professor,
and Mr. Pravin Pote, IT Admin, at Fr. Conceicao
Rodrigues Institute of Technology, Vashi, Mumbai
University, for their invaluable guidance and insights
throughout this research. We also extend our thanks
to all the reviewers for their constructive feedback on
earlier versions of the manuscript. Any remaining
errors are the sole responsibility of the authors and
should not reflect negatively on the aforementioned
individuals.
REFERENCES
Wazid, M., Das, A.K., Shetty, S., Gope, P. and Rodrigues,
J.J. (2020) ’Security in 5G-enabled internet of things
communication: Issues, challenges, and future re-
search roadmap’, IEEE Access, vol. 9, pp. 4466-4489.
Mishra, D. and Natalizio, E. (2020) ’A survey on
cellular-connected UAVs: Design challenges, en-
abling 5G/B5G innovations, and experimental ad-
vancements’, Computer Networks, vol. 182, p.
107451.
Festag, A., Udupa, S., Garcia, L., Wellens, R., Hecht, M.
and Ulfig, P. (2021) ’End-to-end performance mea-
surements of drone communications in 5G cellular
networks’, 2021 IEEE 94th Vehicular Technology
Conference (VTC2021-Fall), pp. 1-6. IEEE.
Jin, J., Ma, J., Liu, L., Lu, L., Wu, G., Huang, D. and Qin,
N. (2021) ’Design of UAV video and control signal
real-time transmission system based on 5G network’,
2021 IEEE 16th Conference on Industrial Electronics
and Applications (ICIEA), pp. 533-537. IEEE.
Hassija, V., Chamola, V., Agrawal, A., Goyal, A., Luong,
N.C., Niyato, D., Yu, F.R. and Guizani, M. (2021)
’Fast, reliable, and secure drone communication: A
comprehensive survey’, IEEE Communications Sur-
veys & Tutorials, vol. 23, no. 4, pp. 2802-2832.
Fakhreddine, A., Raffelsberger, C., Sende, M. and Bettstet-
ter, C. (2022) ’Experiments on drone-to-drone com-
munication with Wi-Fi, LTE-A, and 5G’, 2022 IEEE
Globecom Workshops (GC Wkshps), December, pp.
904-909. IEEE.
Pocovi, G., Kolding, T., Lauridsen, M., Mogensen, R.,
Markm
¨
uller, C. and Jess-Williams, R. (2018) ’Mea-
surement framework for assessing reliable real-time
capabilities of wireless networks’, IEEE Communica-
tions Magazine, vol. 56, no. 12, pp. 156-163.
Bakirci, M. (2023) ’A novel swarm unmanned aerial vehicle
system: Incorporating autonomous flight, real-time
object detection, and coordinated intelligence for en-
hanced performance’, Traitement du Signal, vol. 40,
no. 5.
Zulkifley, M.A., Behjati, M., Nordin, R. and Zakaria, M.S.
(2021) ’Mobile network performance and technical
feasibility of LTE-powered unmanned aerial vehicle’,
Sensors, vol. 21, no. 8, p. 2848.
Gorrepati, R.R. and Guntur, S.R. (2021) ’DroneMap: An
IoT network security in internet of drones’, Develop-
ment and Future of Internet of Drones (IoD): Insights,
Trends and Road Ahead, pp. 251-268.
Campion, M., Ranganathan, P. and Faruque, S. (2018) ’A
review and future directions of UAV swarm communi-
cation architectures’, 2018 IEEE International Confer-
ence on Electro/Information Technology (EIT). IEEE.
Vasylenko, M. and Karpyuk, I.S. (2018) ’Telemetry system
of unmanned aerial vehicles’, Electronics and Control
Systems, vol. 3, no. 57. National Aviation University.
Cheng, C.M. and Pai-Hsiang (2006) ’Performance mea-
surement of 802.11a wireless links from UAV to
ground nodes with various antenna orientations’, 15th
International Conference on Computer Communica-
tions and Networks (ICCCN 2006), October 9-10.
Mobile Network Driven Limitless Range Telemetry System for Autonomous UAVs
707
