
Screw Anomaly Detection Comparison of YoloV8 with Variational
Auto Encoders and Generative Adversarial Networks
Manoj Hudnurkar
1
, Geeta Sahu
2
, Suhas Ambekar
1
, Janhavi Vadke
2
and Kartik Kulbhaskar Singh
1
1
Symbiosis Centre for Management and Human Resource Development, (SCMHRD),
Symbiosis International (Deemed University), Pune, India
2
Department of Information Technology and Data Science, Vidyalankar School of Information Technology, (VSIT),
Mumbai, India
Keywords: YoloV8, Generative Adversarial Networks, Variational Auto Encoder, Latent Space Exploration, Data
Augmentation.
Abstract: This research introduces a novel approach to anomaly detection in screw manufacturing processes by
synergising YoloV8 (You Only Look Once) and hybrid Variational Auto encoders (VAE) and Generative
Adversarial Networks (GAN). In our present undertaking, we are utilizing a thoughtfully curated dataset from
Kaggle. Our primary emphasis is accurately detecting anomalies, particularly subtle irregularities in specific
image areas of the screws. Our research underscores the importance of authentic datasets and involves the
assessment of advanced methods, explicitly focusing on analysing the MVTec Anomaly Detection dataset for
screws. The YoloV8 model showcases its ability to accurately reconstruct images and detect anomalies,
showing great potential for applications in maintaining high manufacturing quality standards. Also, VAE and
GAN results are acceptable. When YoloV8 is compared against VAE & GAN, the results in YoloV8 provide
the highest accuracy with precision & recall. A comprehensive quantitative evaluation of the overall
framework's performance in distinguishing between normal and abnormal cases is achieved by including a
classification report that provides precision, recall, and F1-score metrics. According to the results, the
accuracy attained while applying VAE-GAN is approximately 90%, while the accuracy attained when
employing YoloV8 is between 95% and 97%, with high-speed performance. As a result, YoloV8 performs
well and processes information more quickly than other traditional methods. These results highlight the
importance of using customized datasets and suggest exciting opportunities for improving anomaly detection
techniques in the manufacturing industry.
1 INTRODUCTION
Human ability to recognize novel or anomalous
images surpasses current machine learning
capabilities. Unsupervised algorithms for detecting
anomalies, crucial in applications like manufacturing
optical inspection, face challenges due to limited
defective samples (Dlamini, Kao, et al. , 2021).
Recent interest focuses on novelty detection using
modern machine learning architectures in natural
image data. In classification settings, existing
algorithms often prioritize outlier detection, where
inlier and outlier distributions differ significantly.
The evaluation involves labelling classes arbitrarily
from object classification datasets as outliers and
using others as inliers. However, assessing state-of-
the-art methods for anomaly detection tasks and
identifying subtle deviations in con-fined regions
remains unclear. The lack of comprehensive real-
world datasets for such scenarios hampers the
development of suitable machine-learning models.
Addressing this gap, large-scale datasets like MNIST
(LeCun, 1998), CIFAR10 (Hinton), or ImageNet
(Krizhevsky, 2012) have significantly advanced
computer vision in recent years.
For object detection, the advanced model of the
YOLO family of object detection models, which are
renowned for their accuracy and speed, is called
YOLOv8 (You Only Look Once version 8). (Zhang,
Ren, et al. , 2016) YOLO models use a single neural
network to recognize and classify items in real time.
It is known for its better design compared to earlier
iterations, and YOLOv8 boasts an improved design
that increases accuracy and performance. This could
598
Hudnurkar, M., Sahu, G., Ambekar, S., Vadke, J. and Singh, K. K.
Screw Anomaly Detection Comparison of YoloV8 with Variational Auto Encoders and Generative Adversarial Networks.
DOI: 10.5220/0013598100004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 2, pages 598-608
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

involve enhanced detecting heads, enhanced
backbone networks, and enhanced feature extraction.
(Sohan, SaiRam, et al. , 2024), (Redmon, Divvala, et
al. , 2016). The goal of YOLOv8 is to provide
increased speed and accuracy. (Ren, Girshick, et al. ,
2017). This implies that it has faster and more
accurate object detection. (Hussain, 2023).
(Salimans, 2018)In recent years, the integration
of advanced generative models has propelled the field
of computer vision, offering unprecedented
capabilities in image synthesis and manipulation. The
decoder then uses the sampled points to rebuild the
images, guaranteeing various realistic outputs.
Adversarial learning is incorporated into the model
using a specialized discriminator. By assessing the
created images' authenticity, this discriminator
develops a dynamic learning process that improves
the generator's capacity to produce realistic content.
Custom loss functions like correlation loss are
introduced to improve training. (Lee, 2021)The
codebase has smooth integration of visualization
tools that facilitate the exploration of latent space and
evaluation of generated image quality. The
comprehensive assessment of training and test sets at
the end of the study paper shows how well the model
can reconstruct and produce high-quality images.
Outstanding generative models are critical in
image synthesis, manipulation, and other fields where
our novel combined VAE-GAN system has potential
applications. The following sections explore the
specifics of our new method's design, training
procedure, and outcomes, adding to the current
discussion on how adversarial training and
probabilistic modelling in deep generative models are
coming together. The deficiencies mentioned above
led to the formulation of the following research
questions:
RQ1: To what extent can image reconstruction be
used to detect irregularities in screws? The code
creates a single framework for sophisticated picture
production and modification that integrates
Generative Adversarial Networks (GAN) with
Variational Auto encoders (VAE).
Leveraging Tensor Flow and Keras, the model
employs VAE for latent space exploration and GAN
for adversarial training. The process involves data
loading, augmentation, and the construction of an
encoder-decoder architecture for VAE,
complemented by a discriminator for GAN training.
The study makes use of a large screw dataset that
is accessible on Kaggle and includes pictures of
screws with various characteristics, both good and
bad. The basis for identifying abnormalities in screws
is the test dataset, which contains screws with altered
features, including front, scratch head, scratch neck,
thread side, and thread top. To create efficient
methods for image reconstruction and precise screw
anomaly identification, the study technique
systematically examines abnormalities in various
screw images.
Building an advanced encoder-decoder
framework for VAE and a discriminator specifically
designed for GAN training constitute the fundamental
components of the architecture.
Custom loss functions are introduced to optimize
the training process, most notably the addition of
correlation loss. These loss functions are essential for
improving the model's generative and discriminative
skills. Rigorous training and test set evaluation
systematically demonstrate the model's competency.
This assessment verifies that the combined VAE-
GAN framework produces outputs of excellent
quality and can rebuild images.
In summary, this research endeavours to push the
boundaries of generative models by integrating VAE
and GAN, capitalizing on the diverse screw dataset
from Kaggle. The comprehensive approach, from
data pre-processing to model evaluation, showcases
the potential of this integrated framework for real-
world applications where advanced image generation
is paramount.
The whole paper structure starts with an
introduction of the research study found in section 1,
where the document is divided into sections. Section
2 talks about reviews of the literature. The problems
and inadequacies in the research are discussed in
Section 3. Section 4 talks about the study's goals. The
application of the research approach is covered in
Section 5. Section 6 discusses the analysis and
findings of the experiment. The debate based on the
YoloV8's comparison with VAE and GAN is covered
in Section 7. The conclusion is covered in Section 8.
Section 9 concludes with a discussion of the
research's future scope.
2 LITERATURE REVIEW
To extract information from input photos, YOLOv8
uses an advanced backbone network. This backbone
network is probably built on top-tier convolutional
neural networks (CNNs), incorporating newer
techniques to improve feature extraction. YOLOv8
uses sophisticated convolutional layers such as wise
separable or re-parameterized convolutions to
minimize computational complexity while retaining
high accuracy. The model may use enhanced feature
fusion approaches to better mix features from various
Screw Anomaly Detection Comparison of YoloV8 with Variational Auto Encoders and Generative Adversarial Networks
599

network scales and levels and improve the detection
of small and large objects (ALRUWAILI, ATTA, et
al. , 2023).
The methodical technique for applying YOLOv8
for defect identification involves preparing the
dataset and gathering information about faults
pertinent to your application, such as dents, scrapes,
cracks, and missing pieces. (Redmon, Divvala, et al.
, 2016). To make the model robust, ensure the dataset
has photographs with various backgrounds, lighting
situations, and perspectives. Bounding Boxes: Use
bounding boxes to indicate any image flaws. If there
are multiple flaws, a class should identify each one.
To expand the training data's diversity and strengthen
the model's resilience, apply data augmentation
techniques such as rotation, scaling, flipping, and
colour tweaks (Carrera, 2017).
Introduce NanoTWICE, a dataset featuring 45
grey-scale images showcasing Nano fibrous material
captured by a scanning electron microscope. Forty
photographs with anomalous regions (dust particles,
flattened areas, etc.) are left for training, with five
defect-free images provided. Nevertheless, as the
dataset only provides one kind of texture, it is
unknown whether the techniques tested on this
dataset may be applied to other textures from other
domains.
In a 2007 DAGM workshop, Wieler and Hahn
(Bergmann, 2019) They presented a dataset designed
explicitly for the optical inspection of textured
surfaces. This dataset includes ten classes of
artificially generated grey-scale textures with defects
weakly annotated as ellipses. A total of 1000 flawless
texture patches for training and 150 flawed patches
for testing are included in each lesson. However, the
annotations are rough, and there is little difference in
appearance between different textures because
relatively similar texture models are used.
Additionally, artificially generated datasets serve as
approximations to real-world scenarios.
The notable work by (Bergmann, 2019) Stands
out. They have used the MVTec Anomaly Detection
dataset. This dataset encompasses 5354 high-
resolution colour images across various texture
categories. It includes standard (defect-free) images
for training and images with anomalies for testing.
The anomalies span over 70 defects, including
scratches, dents, contaminations, and structural
changes. Notably, pixel-precise ground truth regions
for all anomalies are provided. The study thoroughly
assesses state-of-the-art unsupervised anomaly
detection techniques, combining traditional computer
vision techniques with deep architectures such as
convolutional auto encoders, generative adversarial
networks, and feature descriptors using pre-trained
convolutional neural networks. In our research, we
leverage this dataset with a specific focus on screws,
aiming to achieve accurate image reconstruction for
precise depiction of anomalies in screws.
(Wang, 2021)Repurposing existing classification
datasets with available class labels, such as MNIST,
is common in evaluating outlier detection methods
within multi-class classification scenarios. (LeCun,
1998), CIFAR10 (Hinton, 2009), and ImageNet
(Krizhevsky, 2012). This approach, widely adopted
(Cho, 2015), (Chalapathy, 2018), (Ruff, 2018),
involves selecting a subset of classes and relabelling
them as outliers. The novelty detection system is then
trained exclusively on the remaining inlier classes,
with the testing phase assessing the model's ability to
correctly predict whether a test sample belongs to an
inlier class. (Buterin, 2013). While this yields
substantial training and testing data, the anomalous
samples significantly differ from those in the training
distribution. Consequently, evaluating how a
proposed method generalizes to anomalies with less
pronounced differences from the training data
manifold remains uncertain.
To address this challenge, (Saleh, 2015) Introduce
a dataset from internet search engines, which includes
six categories of abnormally shaped objects (e.g.,
oddly shaped cars, aeroplanes, and boats). The
purpose of these objects in the PASCAL VOC dataset
is to set them apart from regular samples of the same
class.
The purpose of these objects in the PASCAL
VOC dataset is to set them apart from regular samples
of the same class. (Everingham, 2015). Even though
their data may be more similar to the training data set,
the choice is based on the complete image rather than
identifying the unique or unusual elements. This
technique finds widespread application across
various domains, including cybersecurity, fraud
detection, fault monitoring in industrial processes,
and healthcare. In cybersecurity, anomaly detection
can help identify unusual network activities
indicative of potential security breaches.
(Karame, 2018) Fraud detection aids in spotting
atypical transaction patterns that may suggest
fraudulent activities. In industrial settings, anomaly
detection is valuable for detecting early equipment
failures or deviations from standard operational
behaviour. Anomaly detection is pivotal in enhancing
data-driven decision-making by highlighting
irregularities that might go unnoticed (Welling, 2019)
We offer a summary of popular datasets for
natural image anomaly identification. We highlight
the need for a new dataset, distinguishing between
INCOFT 2025 - International Conference on Futuristic Technology
600
those that necessitate a binary choice between images
with and without defects and those that allow
anomalous region segmentation.
When evaluating methods for segmenting
anomalies in images, the availability of public
datasets is limited, with a focus on textured surfaces.
There is a notable absence of a comprehensive dataset
allowing for segmenting abnormal regions in natural
images.
3 RESEARCH GAPS AND
CHALLENGES
• Given the limited number of defective
samples, unsupervised algorithms used for
anomaly detection, particularly in
applications such as industrial optical
inspection, encounter challenges.
• In cases where the distributions of inliers
and outliers exhibit significant
divergence, existing methods often
prioritize outlier detection in classification
scenarios.
• Reliably determining the anomalies in
screws through image reconstruction is a
significant issue.
• The assessment includes categorizing
classes in object classification datasets as
outliers and the rest as inliers, which is a
bit difficult.
Uncertainty surrounds evaluating cutting-edge
methods for anomaly detection tasks and detecting
subtle deviations in specific areas.
The absence of extensive real-world datasets for
such situations hinders the development of
appropriate machine-learning models.
.
4 OBJECTIVES OF THE
RESEARCH
To systematically investigate anomalies in different
screw images, aiming to develop effective strategies
for image reconstruction and accurate identification
of screw anomalies.
To introduce object detection, segmentation &
classification using the YoloV8 model, which can
detect the object with & without anomalies.
To implement a unified framework integrating
Variational Auto encoders (VAE) and Generative
Adversarial Networks (GAN), i.e. VAE-GAN, for
advanced image generation, synthesis and
manipulation.
To compare the results of YoloV8 with VAE &
GAN.
Custom loss functions and correlation loss are
introduced to optimize and maximize the model's
performance of YoloV8 against VAE & GAN.
5 RESEARCH METHODOLOGY
The suggested model, YoloV8, provides a thorough
approach to visual anomaly identification.
5.1 Approach
First, picture datasets are loaded and enhanced. The
model incorporates loss functions like correlation loss
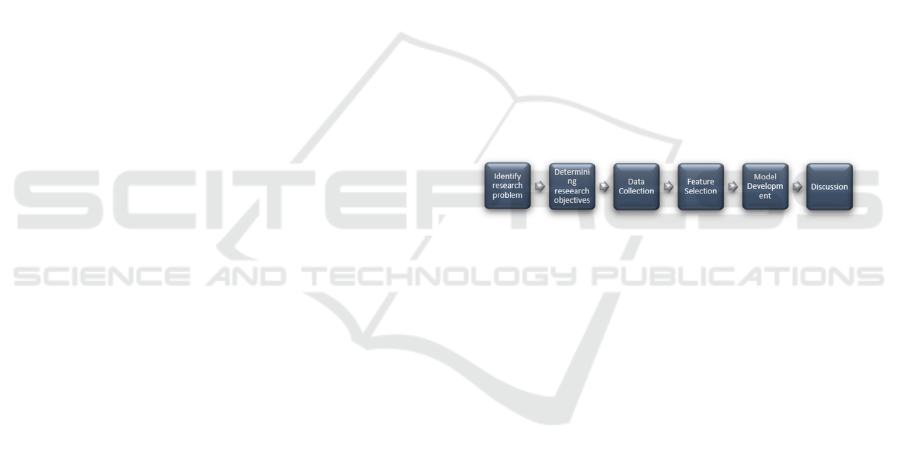
to maximise the training process. Figure 1 represents
the research approach used in the study, as shown
below.
Figure 1: The research approach employed for the study
5.1.1 Identify the Problem and Define the
Objective
One of the main goals of this research project is to
create an efficient model for picture anomaly
detection that specifically addresses screw inspection.
This project aims to create a model that can precisely
detect irregularities in screw images and distinguish
between screws that are devoid of defects and those
that have irregularities like scratches, manipulation,
and unevenness. We aim to build a strong framework
that combines image reconstruction, anomaly
recognition, and image production while utilizing
deep learning approaches.
5.1.2 Data Collection
The dataset used in this study is sourced from Kaggle,
with the underlying data originating from
mvtech.com. Comprising three files: train, test, and
ground_truth-the dataset includes 320 high-
resolution (1024x1024) images of defect-free screws
for training and 160 test images categorized into
Screw Anomaly Detection Comparison of YoloV8 with Variational Auto Encoders and Generative Adversarial Networks
601

classes such as sound, manipulated_front,
scratch_head, scratch_neck, thread_side, and
thread_top. An accurate assessment and validation of
the anomaly detection capabilities of the model are
guaranteed by the availability of ground_truth
annotations.
5.1.3 Exploratory Data Analysis (E.D.A.)
and Feature Selection
To understand the dataset's features, EDA entails
carefully reviewing it. The photos are enhanced,
converted, and pre-processed for functional model
training. The selected characteristics consist of
picture pixels; it is rotated and flipped to increase the
dataset's diversity.
5.1.4 Model Creation
To create realistic images through adversarial
training, the architecture learns the latent
representations of the input images. Custom loss
functions like correlation loss are integrated, and the
model optimizes training. By combining
reconstruction loss, KL divergence, and GAN loss,
the VAE-GAN framework is trained. By precisely re-
constructing flawless photos and recognising
irregularities in screws, the model is refined to
demonstrate its ability to detect anomalies in the
image dataset. KL divergence, GAN loss, and
reconstruction loss are combined to train the
integrated VAE-GAN framework.
5.1.5 Discussion
The methodology evaluates training and test sets to
show the model's effectiveness. The code also makes
it easier to explore rebuilt images and anomalies,
demonstrating the model's accuracy in reconstructing
and identifying anomalies in screw images. A
comparison of Yolo8 with VAE & GAN is also
introduced.
5.2 Tools & Dataset Utilized
More significantly, the Python programming
language, Jupyter Notebook, will be utilized in this
study's data cleaning, preparation, and analysis
stages. Several libraries, including Seaborn, Numpy,
Matplotlib, and Pandas, will be used for data analysis
and visualisation.
The primary data for this study originated from
mvtech.com, and the dataset used was obtained from
Kaggle. The dataset, which consists of three separate
files (train, test, and ground_truth), is essential to our
research. The training set consists of 320 high-
resolution (1024x1024) pictures of regular screws
that serve as a baseline for training the model. In
contrast, the test file has 160 photos divided into
thread_top, thread_side, good, manipulated_front,
scratch_head, and scratch_neck categories. The test
photos have corresponding ground_truth annotations
that help properly assess and validate the model's
anomaly detection skills.
5.3 Techniques Utilized
• YoloV8: A well-liked object detection model
created by Ultralytics is called YoloV8 (You
Only Look Once version 5). It is an
improvement on the deep learning models of
the YOLO series, which are intended to
detect objects in real-time. YoloV8 is well-
suited for quickly detecting objects in
applications like robotics, autonomous cars,
and surveillance since it can process photos
and videos at a high frame rate. It
successfully balances precision and speed.
• VAE: Variational Auto encoders (VAEs) are
an advanced version of traditional auto
encoders that map input data into a
probabilistic latent space using an encoder-
decoder architecture. The Variational Auto
Encoder (VAE) draws inspiration from the
Helmholtz Machine. (Dayan, 1995), which
introduced the concept of a recognition
model. Its lack of optimization for a single
objective paved the way for the development
of V.A.E.s. Nevertheless, using the
reparameterization approach, it back
propagates via the numerous layers of the
deep neural networks that are nested within
it. (Welling, 2019).
• Since its inception, the VAE framework has
undergone various extensions, including
applications to dynamic models. (Johnson,
2016), models with attention (Gregor, 2014),
and those incorporating multiple levels of
stochastic latent variables (Kingma, 2016).
VAEs have proven to be a fertile ground for
building diverse generative models. The
Generative Adversarial Network (GAN)
model has also garnered noteworthy interest
(Goodfellow, 2014). Recognising these
complementary strengths has led to the
proposal of hybrid models to leverage both
approaches' advantages. (Dumoulin, 2017),
(Grover, 2018), (Rosca, 2018)
INCOFT 2025 - International Conference on Futuristic Technology
602

• GAN: Generative Adversarial Networks
(GANs) are prominent in Machine Learning
(ML) frameworks. (Grnarova, 2019). The
practical application of GANs gained
momentum in 2017, with an initial focus on
refining the generation of human faces,
showcasing the technology's capability for
image enhancement and producing more
compelling illustrations at high-intensity
levels. This historical background highlights
the development of GANs and their
revolutionary influence on several machine-
learning domains. (Aggarwal, 2021). Two
neural networks comprise the GAN
architecture: a discriminator and a generator.
The generator attempts to mimic the
properties of accurate training data by
creating synthetic data out of random noise.
In addition, the discriminator serves as a
binary classifier that discerns between real
and fake data.
6 EXPERIMENTAL RESULTS &
ANALYSIS
6.1 Yolo8
This section has demonstrated the practical
significance of the suggested methods by discussing
their outcomes in several performance metrics,
including accuracy, mAP, precision, Confusion
matrix, etc. According to an analysis of the trained
models ' observations and results, models trained on
segmented images perform better than colour and
grayscale images. The minimal noise in the photos
adds to the incredible accuracy of the models.
A new Transfer-learning model is called YoloV8.
This model is trained on the available dataset for 100
epochs. VAE & GAN model achieved an accuracy of
approximately 90%. But the accuracy achieved in
YoloV8 is highest, around 97%, with a confusion
matrix of 0.93 in the correct prediction of the screws
with & without anomalies. Figure 2 below shows
object detection & classification from the images
dataset of screws. Table 1 shows the classification for
anomaly detection. Table 2 gives the experimental
setup utilised in YoloV8.
Table 1: Classification of Anomaly Detection
Sr. No.
Class
1 manipulated_front
2 scratch_head
3 scratch_neck
4 thread_side
5 thread_top
Table 2: Experimental Setup Utilized in Yolov8
Sr.
No.
Parameters Experimental Values
1 Epochs
100
2 Batch_Size
16
3 Image_size
640
4 Optimizer
Stochastic Gradient
Descent
(
SGD
)
Figure 2: Training the model using Yolo8 object detection
& classification from the image dataset.
The results obtained in Figure 3 below indicate
the rate of accuracy in terms of performance when the
YoloV8 is used for detecting the screws with and
without anomalies. The value '1.0' indicates the
screws are perfectly alright without any anomaly. The
values' 0.6, 0.7' show the screws are slightly distorted
and in the anomaly detection category.
Screw Anomaly Detection Comparison of YoloV8 with Variational Auto Encoders and Generative Adversarial Networks
603
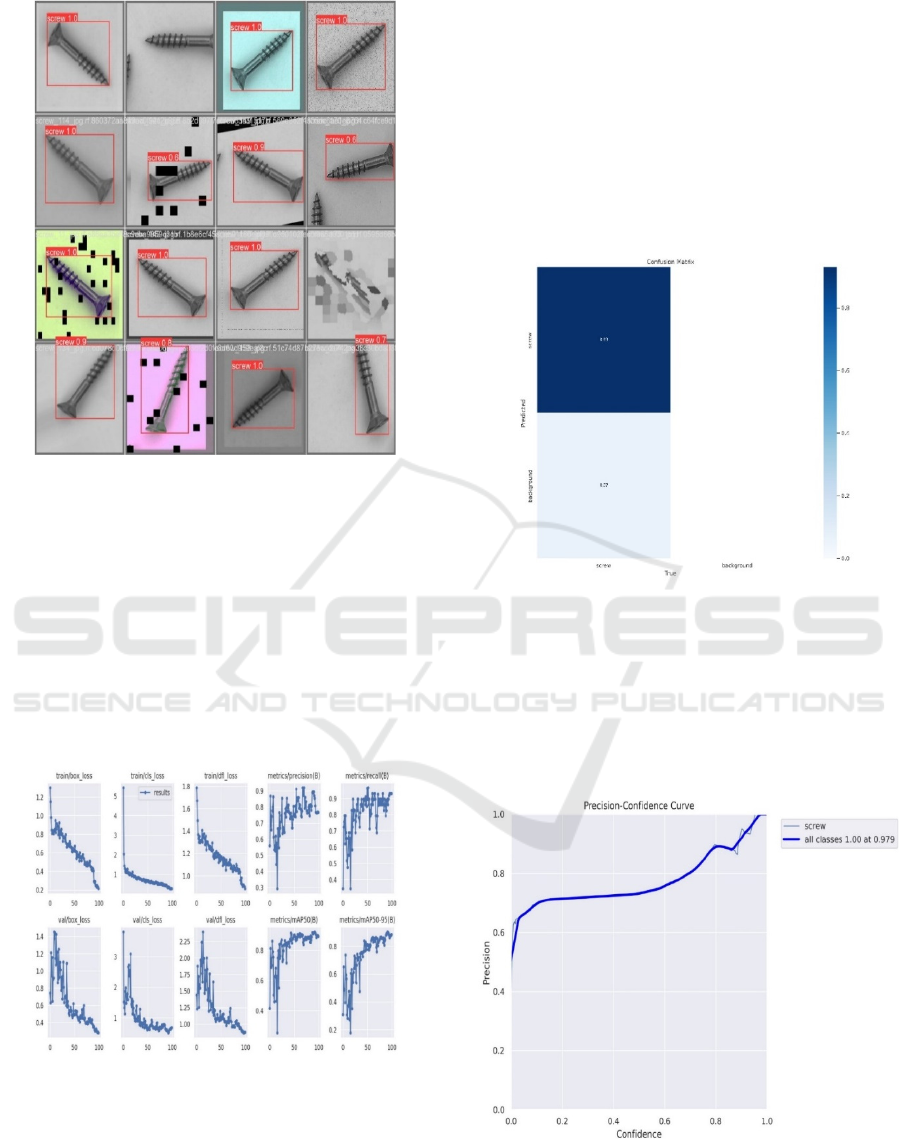
Figure 3: Accuracy achieved when Yolo8 object detection
is utilized with & without anomaly.
Utilizing YoloV8, the overall loss decreased from
1.29 to almost 0.230 as the number of iterations
increased from 0 to 99. The loss while training the
dataset with & without anomaly images at the 99th
iteration is 0.214, which is very low compared to
other conventional methods. The metric-mAP50
values gradually increased to 0.897. Figure 4 below
is the graphs displaying YoloV8's various parameter
values at multiple epochs.
Figure 4: Graphs displaying YoloV8's various parameter
values at various epochs
For testing purposes, the model has undergone
100 epochs; at the initial stage of the first 20 epochs,
the precision obtained is 0.76. In subsequent
iterations between 80-100 epochs, the precision
obtained is 0.89 at the 95th iteration, which is higher
than other conventional methods & in comparison to
VAE-GAN. Similarly, the recall value at the 97
th
iteration is 0.9310.
Figure 5 shows the confusion matrix for the
training dataset, which obtained a value of 0.93 and
achieved good accuracy when measured against VAE
& GAN.
Figure 5: Confusion Matrix
Figures 6,7,8 show the positive metrics
calculated: precision-confidence, precision-recall,
and recall-confidence curves, respectively.
Figure 6: Precision-Confidence Curve
INCOFT 2025 - International Conference on Futuristic Technology
604
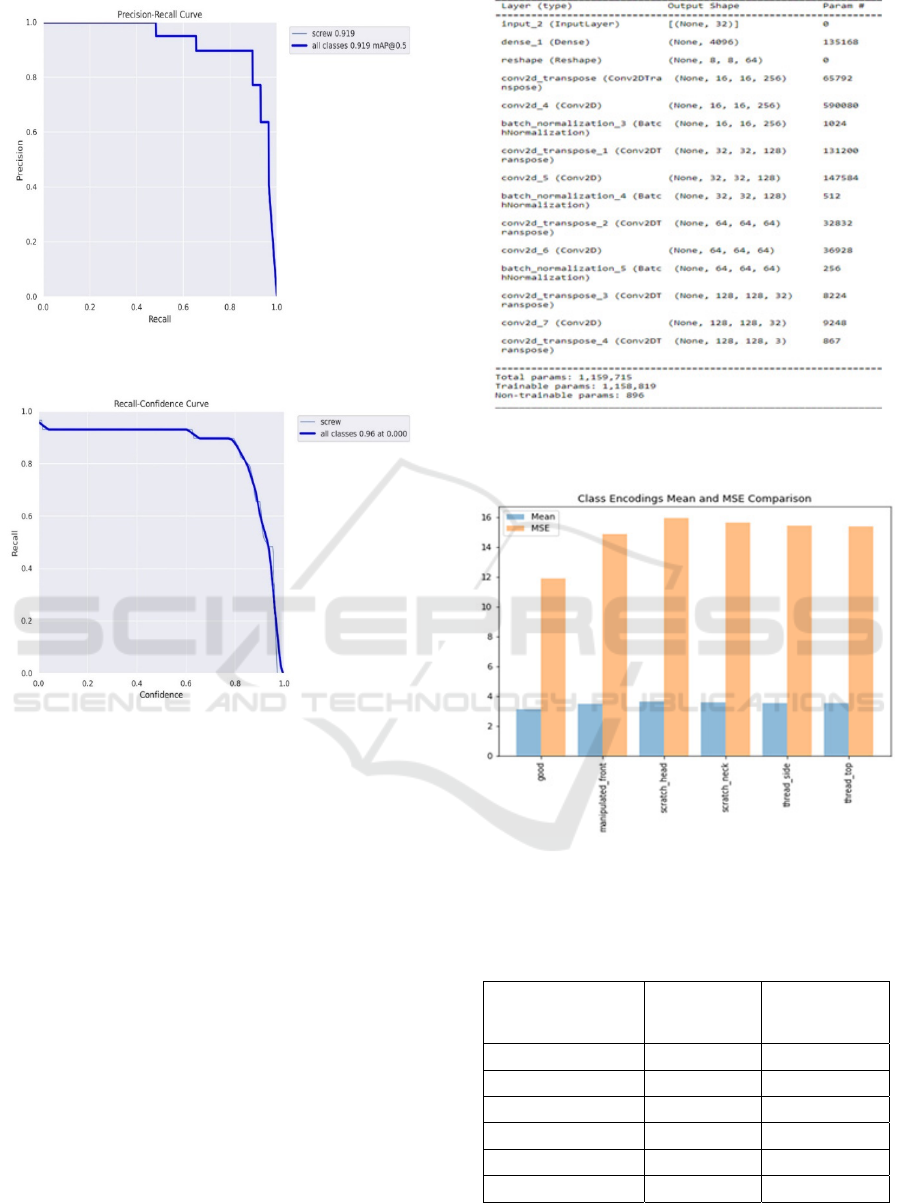
Figure 7: Precision-Recall Curve
Figure 8: Recall-Confidence Curve
6.2 VAE & GAN
Reconstruction error levels (criteria) are varied to
perform more sophisticated analysis, and the sci-kit-
learn algorithm is used to compute extensive
classification metrics, including precision, recall, and
F1-score. Furthermore, our approach includes a class-
by-class analysis of the test data for every class.
Figure 9 indicates the parameters applied while using
VAE & GAN architecture. Figure 10 is the class
encoding, and mean comparison is calculated to show
the performance in terms of the classification of
screws with and without anomalies detection. Table 3
shows the values obtained in the class encoding mean
and MSE comparison.
Figure 9: Parameters applied in VAE & GAN
Figure 10: Class Encoding and Mean Comparison values
obtained in class encoding mean and use comparison
Table 3: shows the values obtained in the class encoding
mean and MSE comparison.
Screw Class Class
Encoding
Mean
MSE
Comparison
Good 3.21
11.99
Manipulated_front 3.62
14.82
Scratch_head 3.72
14.82
Scratch_neck 3.72
15.51
Thread_side 3.72
14.90
Thread_top 3.72
14.8
Screw Anomaly Detection Comparison of YoloV8 with Variational Auto Encoders and Generative Adversarial Networks
605
7 DISCUSSION
A thorough examination of the techniques used,
centred on the use of YoloV8, Generative Adversarial
Networks (GAN) and Variational Autoencoders
(VAE) in the complex field of anomaly detection for
screw pictures, opens the debate. These cutting-edge
deep learning approaches solve problems frequently
encountered in anomaly detection jobs, such as
imbalanced datasets and limited data availability for
particular classes. The autoencoder, VAE, and GAN
work to identify abnormalities in later testing stages
by comparing reconstruction errors to predetermined
criteria.
A thorough quantitative assessment of the overall
framework's effectiveness in differentiating between
normal and abnormal cases is obtained by
incorporating a classification report with precision,
recall, and F1-score metrics. The results discussed
indicate the accuracy achieved while using YoloV8 is
between 95-97%, and when VAE-GAN is applied,
the accuracy achieved is around 90%. Thus, the
performance of YoloV8 is high and has faster
processing than other conventional techniques
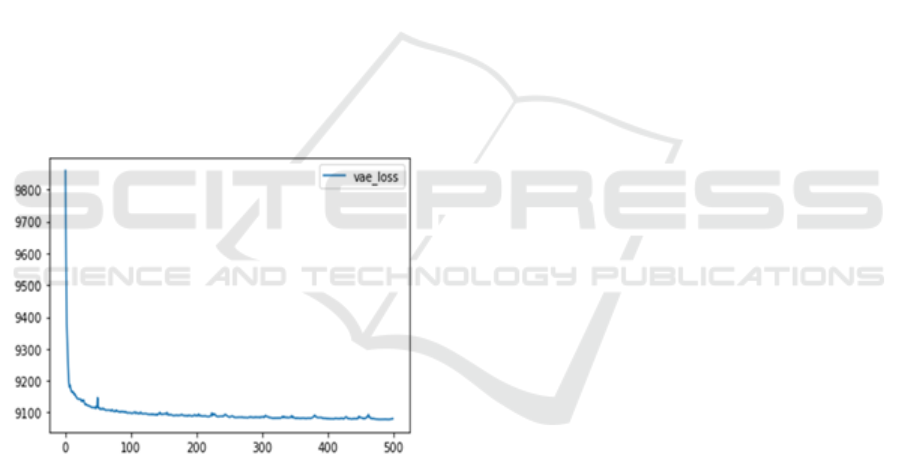
Figure 11: Graph showing the vae_loss
The figure 11 a graph on 'vae_loss creates a plot
of the 'vae_loss' column over epochs. Figure 11
shows the graph of the VAE loss calculated. The loss
calculated in YoloV8 is 0.2141, again less than VAE
& GAN.
8 CONCLUSION
As a result, this study's one-class classification
paradigm for anomaly detection in screw images
incorporates robust and synergistic integrations of
sophisticated deep learning approaches, namely
YoloV8, Variational Autoencoders (VAE) and
Generative Adversarial Networks (GAN). The
empirical investigation, characterised by thorough
testing and assessment, continually shows how
effective the integrated method is. It continuously
demonstrates its skill in recreating images and
detecting anomalies, guided by Mean Squared Error
(MSE) loss. The combined use of GANs' adversarial
training dynamics and VAE's probabilistic nature
improves anomaly identification of overall screw and
gives users a deeper comprehension of the dataset.
The effectiveness of the integrated methodology
in differentiating between normal and abnormal cases
is confirmed by quantitative validation using
classification reports with precision, recall, and F1-
score metrics. Moreover, the examination of
variations in encoded representations between classes
highlights how flexible the models are for a variety of
screw types. However, YoloV8 yields better accuracy
at 97% and 96% than VAE & GAN. Visual
assessments, comparing original and reconstructed
images, highlight the collective effectiveness of these
advanced deep learning techniques, especially in the
challenging task of accurately reconstructing images
with anomalies.
9 FUTURE SCOPE OF
RESEARCH
Looking ahead, future work can explore
enhancements to the proposed methodology.
Techniques for transfer learning could be investigated
to adapt the model to new datasets or novel anomaly
types. Additionally, the scalability and generalization
of the approach to more extensive and diverse
datasets could be a focus for further research.
Integration with real-time monitoring systems and
deployment in practical industrial environments
could pave the way for effective implementation.
This research advances anomaly detection
methodologies and emphasizes the practical
relevance of integrating sophisticated deep learning
techniques in addressing industrial challenges. The
findings contribute to the ongoing dialogue on
anomaly detection, showcasing the potential for
transformative applications in quality control
processes within industrial settings. In essence, our
research bridges the theoretical foundations of deep
learning with the pragmatic demands of industrial
quality control. The findings underscore the viability
and relevance of one-class classification
methodologies, especially auto-encoder
INCOFT 2025 - International Conference on Futuristic Technology
606

architectures, in addressing the challenges posed by
image-based anomaly detection. As industries
increasingly adopt automated systems for quality
assurance, our work contributes to the evolving
landscape of artificial intelligence applications to
enhance precision and reliability in industrial
processes.
ACKNOWLEDGEMENTS
My deepest gratitude goes out to Dr. Manoj
Hudnurkar and Dr. Suhas Ambekar from Symbiosis
Centre for Management and Human Resource
Development, (SCMHRD), Symbiosis International
(Deemed University) and to Geeta Sahu, Assistant
Professor in the Department of Information
Technology & Data Science at Vidyalankar School of
Information Technology (VSIT), Mumbai, for their
unwavering support. They continuously offered
support and direction while preparing this research
paper. I also want to thank everyone who assisted us
directly and indirectly with the study documentation.
REFERENCES
S. Dlamini, C.-Y. Kao, S.-L. Su and C.-F. J. Kuo,
“Development of a real-time machine vision system for
functional textile fabric defect detection using a deep
YOLOv4 model,” Textile Research Journal, vol. 92, no.
5-6, 6 September 2021.
L. B. Y. B. a. P. H. Y. LeCun, “Gradient-based learning
applied to document recognition,” Proceedings of the
IEEE,vol. 86, pp. 2278-2324, 1998.
I. S. a. G. E. H. A. Krizhevsky, “ImageNet Classification
with Deep Convolutional Neural Networks,”
Proceedings of the 25th International Conference on
Neural Information Processing Systems, pp. 1097-
1105, 2012.
K. He, X. Zhang, S. Ren and J. Sun, “Deep residual learning
for image recognition,” in 2016 IEEE Conference on
Computer Vision and Pattern Recognition (CVPR), Las
Vegas, NV, USA, 2016.
M. Sohan, T. SaiRam and C. V. RamiReddy, “A Review on
YOLOv8 and its Advancements,” in Data Intelligence
and Cognitive Informatics, ResearchGate, 2024, pp.
529-545.
J. Redmon, S. Divvala, R. Girshick and A. Farhadi, “You
Only Look Once:Unified, Real-Time Object
Detection,” in 2016 IEEE Conference on Computer
Vision and Pattern Recognition, 2016.
S. Ren, K. He, R. Girshick and J. Sun, “Networks, Faster
R-CNN: Towards Real-Time Object Detection with
Region Proposal,” IEEE Transactions on Pattern
Analysis and Machine Intelligence, vol. 39, no. 6, 2017.
M. Hussain, “YOLO-v1 to YOLO-v8, the Rise of YOLO
and Its Complementary Nature toward Digital
Manufacturing and Industrial Defect Detection,”
Machines, 2023.
C. D. P. T. &. A. M. Salimans T, “Ethereum Fraud
Detection using Machine Learning,” 2018.
T. B. P. Z. L.-H. Lee, “All one needs to know about
metaverse: a complete survey on technological
singularity, virtual ecosystem, and research agenda,”
Journal of Latex Class FIles, 2021.
M. ALRUWAILI, M. N. ATTA, M. H. SIDDIQI, A.
KHAN, A. KHAN, Y. ALHWAITI and S. ALANAZ,
“Deep Learning-Based YOLO Models for the
Detection of People With Disabilities,” IEEE Access,
25 December 2023.
F. M. G. B. a. E. L. D. Carrera, “Defect Detection in SEM
Images of Nanofibrous Materials,” IEEE Transactions
on Industrial Informatics, pp. 551-561, 2017.
M. F. D. S. a. C. S. P. Bergmann, “MVTec AD — A
Comprehensive Real-World Dataset for Unsupervised
Anomaly Detection,” IEEE/CVF Conference on
Computer Vision and Pattern Recognition (CVPR), pp.
9584-9592, 2019.
S. X. Z. Z. &. L. H. Wang Y, “Ethereum Fraud Detection
using Transaction Network Analysis,” 2021 IEEE
International Conference on High Performance
Computing and Communications, pp. 1920-1927,
2021.
A. K. a. G. Hinton, “Learning multiple layers of features
from tiny images,” Technical report, University of
Toronto, p. 2009.
J. A. a. S. Cho, “Variational Autoencoder based Anomaly
Detection using Reconstruction Probability,” Technical
report SNU Data Mining Center, 2015.
A. K. M. a. S. C. R. Chalapathy, “Anomaly Detection using
One-Class Neural Networks,” 2018.
R. V. N. G. L. D. S. A. S.-d. A. B. L. Ruff, “Deep One-
Class Classification,” Proceedings of the 35th
International Conference on Machine Learning volume
80 of Proceedings of Machine Learning Research,, pp.
4393-4402, 2018.
V.Buterin, “Ethereum White Paper: a next generation smart
contract & decentralized application platform,” 2013.
A. F. a. A. E. B. Saleh, “Object-Centric Anomaly Detection
by Attribute-Based Reasoning,” IEEE Conference on
Computer Vision and Pattern Recognition, pp. 787-
794, 2013.
S. M. A. E. L. V. G. C. K. I. W. J. W. a. A. Z. M.
Everingham, “The Pascal Visual Object Classes
Challenge: A Retrospective,” International Journal of
Computer Vision, pp. 98-136, 2015.
A. E. &. C. S. Karame G.O, “Identifying Ethereum Fraud
Detection using Graph Based Analysis,” In Proceeding
of the 2018 ACM SIGSAC Conference on Compute
and Communications Security, pp. 177-194, 2018.
P. G. E. H. R. M. N. a. R. S. Z. Dayan, “The Helmholtz
Machine,” Neural Computation, pp. 889-904, 1995.
D. P. K. a. M. Welling, “An Introduction to Variational
Autoencoders,” Foundations and Trends in Machine
Learning: Vol xx, No. xx, pp. 1-18, 2019.
Screw Anomaly Detection Comparison of YoloV8 with Variational Auto Encoders and Generative Adversarial Networks
607

M. D. K. D. A. W. R. P. A. a. S. R. D. Johnson, “Composing
graphical models with neural networks for structured
representation and fast inference,” Advances in Neural
Information Processing Systems, pp. 2946-2954, 2016.
K. I. D. A. M. C. B. a. D. W. Gregor, “Deep
AutoRegressive Networks,” International Conference
on Machine Learning, pp. 1242-1250, 2014.
D. P. T. S. R. J. X. C. I. S. a. M. W. Kingma, “Improved
Variational inference with inverse autoregressive
flow,” Advances in Neural Information Processing
Systems, pp. 4743-4751, 2016.
I. J. P.-A. M. M. B. X. D. W.-F. S. A. a. Y. B. Goodfellow,
“Generative adversarial nets,” Advances in Neutral
Information Processing Systems, pp. 2672-2680, 2014.
V. I. B. B. P. A. L. M. A. O. M. a. A. C. Dumoulin,
“Adversarially learned inference,” International
Conference on Learning Representations, 2017.
A. M. D. a. S. E. Grover, “Flow-GAN: Combining
maximum likelihood and adverserial learning in
generative models,” AAAI Conference on Artificial
Intelligence., 2018.
M. B. L. a. S. M. Rosca, “Distribution matching in
variational inference,” arXiv preprint
arXiv:1802.06847, 2018.
K. Y. L. A. L. N. P. I. G. T. H. A. K. Paulina Grnarova, “A
Domain Agnostic Measure for Monitoring and
Evaluating GANs,” Advances in Neural Information
Processing Systems 32 (NeurIPS 2019), 2019.
M. M. G. B. Alankrita Aggarwal, “Generative adversarial
network: An overview of theory and applications,”
International Journal of Information Management Data
Insights, 2021.
INCOFT 2025 - International Conference on Futuristic Technology
608
