
Automated Defect Detection in Ceramic Tiles Using Transfer
Learning Models
Shanthakumari R, Mamtha B, Mohamed Haarith J, Jaswanth J and Varadhaganapathy S
Department of Information Technology and Enginnering, Kongu Engineering College, Tamilnadu, India
Keywords: Transfer Learning Using Convolutional Neural Network VGG16, MobileNetV2, AlexNet Defect Detection
and Classification Ceramic Tiles.
Abstract: The ceramic tile enterprise is dealing with sizable challenges, particularly in growing countries with every
everyday old technologies. The complex nature of the ceramic tile technology prepare often comes
approximately in surface abandons inside the closing objects. Customarily, the class and reviewing of these
gadgets rely upon human assessment, that can cause errors and irregularities. that is specifically concerning
whilst tiles are utilized in legacy buildings just like the Taj Mahal, where defects could compromise such
ancient structures' beauty and integrity. Therefore, it's miles essential to implement an automatic illness
detection and type system to make sure that handiest tiles are used. in this paper, we recommend a version the
usage of well-hooked up Convolutional Neural Networks (CNNs), which have been hired to discover and clas
sify floor defects in ceramic tiles, attaining superior overall performance. Making use of those superior
fashions ensures the tiles are very well inspected earlier than use, stopping any ability harm to crucial heritage
web sites. The outcomes exhibit the effectiveness of this approach in surpassing present accuracy benchmarks,
offering a reliable answer for the ceramic tile industry.
1 INTRODUCTION
In production, disorder detection is crucial for
ensuring product quality and maintaining efficient
manufacturing processes. Early detection allows for
corrective actions, such as replacing machine tools or
performing maintenance, to maintain process
performance and reduce material waste. Defect
detection typically precedes machine maintenance
diagnostics and determines whether a product from a
process or vendor should be accepted or rejected.
Traditionally, this relied on manual inspection, but
with increasing automation in manufacturing,
automated defect detection systems have become
essential.
One common approach involves analyzing is the
surface images to identify defects. Widespread
research has combined traditional image processing
techniques such as edge detection, grayscale
thresholding, and image segmentation defect patterns
are continuous and contrast with the background.
However, the ceramic tile industry, especially in
developing countries faces challenges due to
outdated technologies and reliance on manual
inspection. Many manufacturers struggle with quality
control, leading to manufacturers struggle with
manufacturers struggle with quality control, leading
to defective products and misclassified tiles. Worker
fatigue and subjective judgment further exacerbate
these issues. Addressing these challenges is critical to
improving quality control and ensuring accurate
defect detection, particularly in high-stakes
applications like heritage sites and legacy buildings.
2 LITERATURE REVIEW
Image training is broadly applied for imperfection di
scovery and type in a technology. Karimi and
Asemani (Elbehiery, Hefnawy, et al. , 2007) remoted
into four primary techniques to deformity place and
type counting sifting techniques, basic calculations,
version-based totally techniques, and authentic
strategies. Having an area in the sifting method,
neural systems are generally utilized (Wan, Fang, et
al. , 2022). A. Tile floor Imperfection the invention
of ceramic tiles is a important scholarly subject.
numerous associated investigations have come about.
Zhang et al. (Lu, Lin, et al. , 2022) outlined and in
R, S., B, M., J, M. H., J, J. and S, V.
Automated Defect Detection in Ceramic Tiles Using Transfer Learning Models.
DOI: 10.5220/0013585400004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 1, pages 771-777
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
771

comparison, three discovery calculations, engaging
in designed ceramic tile deformity department
through threshold-based, flexible morphology, and
wavelet exchange combination strategies. Zhang et
al. (Hocenski, Vasilic, et al. , 2006) utilized the
advanced SSR calculation, saliency discovery, and
auxiliary place for complicated floor ceramic tile
floor imperfection distinguishing proof. Casagrande
et al. (Vasilic, Afshar, et al. , 2017) compared
spotlight extraction techniques, deciding on fractal
surface research and discrete wavelet trade,
optimized parameters with a hereditary calculation,
and utilized a classifier for deformity judgment. Haei
S H et al. (Karimi, Mishra, et al. , 2024) utilized a
nearby fluctuation rotation-invariant degree
administrator for deformity facet extraction and
bolster vector machines for imperfection type
acknowledgment.
Those calculations are all based totally on
preprocessing the image to kill commotion and at that
point using pertinent administrators to extricate or
improve imperfection area facts. those calculations
have wonderful influences while there may be a self-
obtrusive contrast among surrenders and foundation,
however when the imperfection measure is little or
there are expansive impedances with basis records,
the impact can be destitute. at the equal time, these
calculations as they were accomplish deformity
sector extraction, whereas in real era, shifting ahead
era productiveness by evaluating items agreeing to
imperfection degree and amount is of extremely good
significance et al. (Dong, Pan, et al. , 2024) proposed
an unsupervised mastering-based surface
imperfection discovery method, which utilized an
autoencoder and clustering calculation to extricate
and classify highlights from images, and at that point
applied morphological operations and related space
investigation to locate and fragment deformity areas.
This method does not require categorized statistics,
and might adaptively
manage numerous kinds
and surfaces of ceramic tile surfaces, but it could now
not be capable of viably distinguish complicated and
little abandons. Wang et al. show the N-DSCD
calculation, which combines conventional location
strategies with DCNN. This approach brings down
untrue discovery rates and makes strides framework
of common sense through a reference picture library
and synchronized comparisons. In any case, keeping
up an expansive reference picture library raises
capacity and computational costs. Wan et al.
proposed a profound learning strategy for ceramic tile
surface deformity location based on an adjusted
YOLOv5 arrangement and an information increase
method. Their strategy can viably distinguish
different sorts of abandons, such as splits, gaps,
stains, and scratches, on distinctive sorts of tiles, such
as coated, cleaned, and matte tiles. In any case, their
strategy may not be able to handle complex and
assorted foundations and may require more preparing
information and computational assets. Hocenski et
al.show an approach based on moving midpoints with
nearby contrasts. It is able as it were to identify a
constrained subset of blunders, those with tall
differences to10the encompassing region of the tile.
As a more common instrument for deformity location
in ceramic tiles, a few FE strategies.
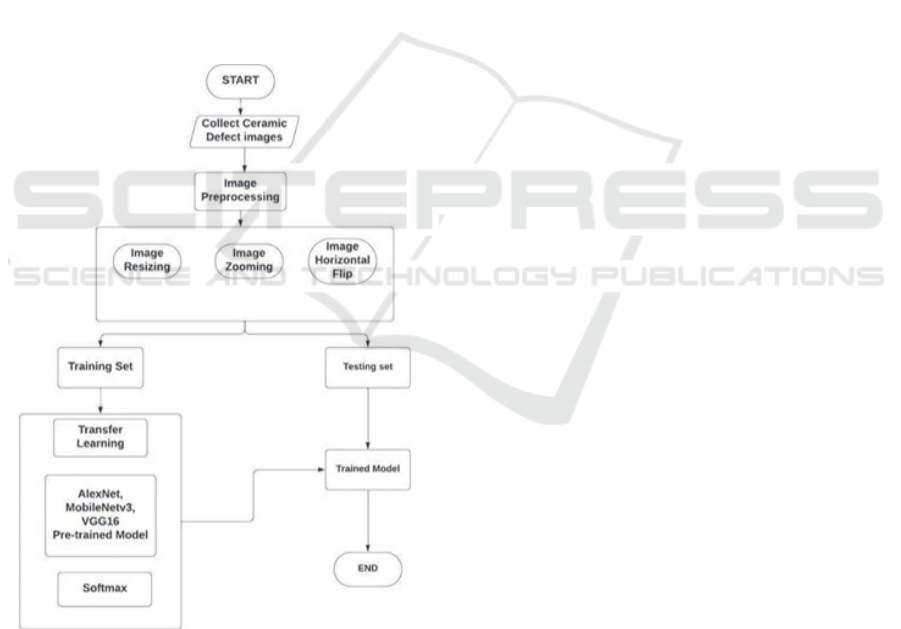
3 PROPOSED METHODOLOGY
In these works, we present a sensible defect detection
system for the ceramic tile enterprise the usage of a
hybrid deep gaining knowledge of version to pick out
crack spots as defects at the manufacturing line. The
version is trained the usage of 12,483 photos of
ceramic tiles, with 9,988 snap shots used for
validation and 2,495 photos used for education. We
utilize three deep getting to know models: AlexNet,
VGG16, and MobileNetV2, every contributing
precise strength to improve crack detection accuracy.
The AlexNet model consists of 5 convolutional
layers, three max-pooling layers, 2 normalized layers,
2 fully connected layers, and 1 SoftMax layer. The
convolutional layers are responsible for function
extraction, where filters experiment the input snap
shots to discover patterns together with cracks. each
convolutional layer uses a ReLU (Rectified Linear
Unit) activation feature, which introduces non-
linearity to assist the version analyze complicated
functions. The absolutely linked layers combine the
extracted capabilities for type, with the SoftMax layer
outputting whether a tile is faulty or not The VGG16
demonstrate, too referred to as VGGNet, is a 16-layer
convolutional neural arrange that contains 13
convolutional layers and three absolutely related
layers. Its deep structure and steady use of
convolutional layers
make it distinctly effective for extracting relevant
capabilities. MobileNetV2 a lightweight
convolutional of the rectified system of the neural
organize is specially mentioned for portable and
implanted imaginative and prescient applications. It
makes use of a green architecture with intensity-
sensiable separable convolutions, which noably
reduces the variety of parameters without
compromising cracks in resource confined the time
neural organize, is specially mentioned for portable
and implanted imaginative and prescient applications.
INCOFT 2025 - International Conference on Futuristic Technology
772
It makes use of a green architecture with intensity-
sensible separable convolutions, which notably
reduces the variety of parameters without
compromising accuracy. Fig[1] This makes
MobileNetV2 ideal for real- time detection of defects,
which includes cracks, in resource- confined
environments like manufacturing traces. Its
optimized design ensures that it can handle the
demands of live defect detection. By leveraging the
strengths of AlexNet, VGG16, and MobileNetV2 in a
hybrid approach, the model enhances feature
extraction and improves the accuracy of detecting
cracks in ceramictiles. The hybrid method combines
the best aspects of each model, ensuring high
performance in the detection system. Moreover,
transfer learning is used with pre- trained networks to
enhance performance even more. This intelligent
defect detection system contributes to improved
quality control in the ceramic tile production process
by reliably identifying defects like cracks in real time.
Figure 1: Architecture of Proposed Methodology
3.1 Common Surface Defects Of
Ceramic Tiles
The ceramic tile manufacturing technique is intricate
and involves a couple of degrees, every of which
performs an important function in shaping the final
product's fine. The stages regularly incorporate crude
fabric arrangement, blending, crushing, shower
drying, shaping, drying, coating, terminating,
classification, and bundling. As ceramic tiles pass
through these stages, there is a risk of defects
emerging, particularly during sensitive processes like
firing and glazing. Among the numerous defects that
can appear, two are not ably common and
significantly affect both the tile’s structural integrity
and aesthetic appeal:
3.1.1 Crack Defect
One of the most common and obvious flaws in
ceramic tiles is cracking. These flaws show up as
cracks or fissures that are evident on the tile's
surface. Cracked tiles are generally considered
unsuitable for sale and may need to be discarded or
recycled.
3.1.2 Spot Imperfection
Spot imperfections refer to the presence of
discoloured, uneven, or raised spots on the surface of
ceramic tiles. Some spots may be small and blend in
with the tile’s pattern, while others can be large and
starkly visible, making the tile unsuitable for high-
quality finishes. Two common surface defects.
3.2 Image Augmentation And
Preprocessing
In the context of detecting defects in ceramic tiles,
image augmentation and preprocessing play vital
roles in preparing high-quality images for training
deep learning models. Here’s how these processes
are applied specifically to ceramic tile defect
detection
3.2.1 Data Preprocessing
Image preprocessing ensures that all images used for
training the model are clean, consistent, and ready for
feature extraction. By improving the contrast of the
pictures, histogram equalization makes flaws simpler
to see and identify. These preprocessing steps
improve the satisfactory of the input statistics,
helping the model perform greater efficiently in
figuring out tile defects in the course of production.
Automated Defect Detection in Ceramic Tiles Using Transfer Learning Models
773
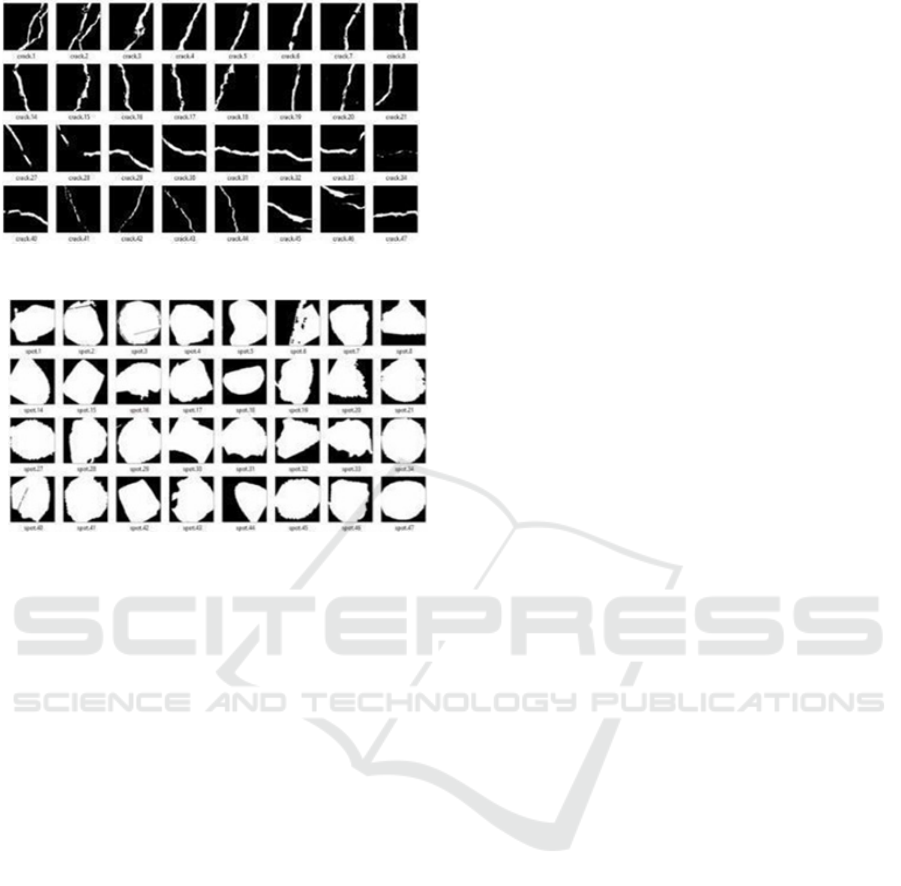
Figure 2: crack
Figure 3: Spot
3.2.2 Data Augmentation
Image augmentation in ceramic tile defect detection
involves transforming the original images to create a
more diverse and comprehensive dataset. Translation
shifts the image slightly, making the model robust to
minor changes in tile positioning. Colour jittering
introduces slight colour variations to mimic glazing
inconsistencies, and adding noise to images teaches
the model to focus on relevant defects rather than
small artifacts or noise.
3.3 Adopting Transfer Learning
Through Pre-Trained Network
Models
After preprocessing highlights utilizing
convolutional techniques, the precision of the
models is thoroughly tried. To accomplish
upgraded and exact comes approximately, the
introductory show reviews pleasant- tuning via
alternate studying. Exchange learning empowers
integrating pre- trained thick neural arrange models,
such as VGG-16, AlexNet, and MobileNetV2, with
recently created models for successful extraction.
This approach essentially decreases generalization
blunders and streamlines the preprocessing of the
dataset. In this work, the yield from a layer going
before the last yield layer of the pre-trained organize
is joined into the recently outlined profound learning
show,workingas a modern coordinate including
extractor. Sometime recently include extraction, the
input picture tests must be resized to coordinate the
required arrange of the pre- trained arrange models,
particularly 224x224 pixels for VGG models. Once
the highlights are extricated, the yield layer of the
show identifies and classifies imperfect tiles, in
this way calculating the misfortune and precision
measurements. This setup encourages the real-time
recognizable proof of inadequate tiles on the
generation line, guaranteeing proficient quality
control and improved operational viability in
ceramic tile fabricating. MobileNetV2 is planned
with a center on effectiveness and moo idleness,
making it especially reasonable for inserted
applications. Its design makes use of depth-clever
distinguishable convolutions, which essentially
decrease the number of parameters whereas
retaining up tall precision in identifying surrenders
along with breaks and notice defects in ceramic
tiles. After resizing, the show extricates highlights
from the pictures, and the yield layer classifies
the tiles, calculating misfortune and exactness
measurements to assess execution. For AlexNet,
the resizing necessity remains steady at 224x224
pixels for input pictures. AlexNet’s engineering
comprises numerous convolutional layers that
viably capture. Perplexing highlights from the tile
pictures. The model’s plan joins ReLU actuation
capacities, pooling layers, and a SoftMax layer for
classification, encouraging the location of
abandons with tall accuracy. After highlight
extraction, the yield layer recognizes and classifies
imperfect tiles, computing the comparing
misfortune and exactness measurements to screen
the model’s execution.
3.3.1 AlexNet
The layers that make up AlexNet are one SoftMax
layer, 3 max-pooling layers, absolutely linked layers,5
convolution layers, and Normalized layers. The
layers that make up AlexNet are one SoftMax layer,
3 max-pooling layers, two completely related layers,
5 convolution layers, and two Normalized layers. A
non-linear activation characteristic called "ReLU"
plus a convolution clear out make up each
convolution layer. The max-pooling characteristic is
executed with the aid of the pooling layers, and
because absolutely linked layers are gift, the input
length is fixed.
INCOFT 2025 - International Conference on Futuristic Technology
774
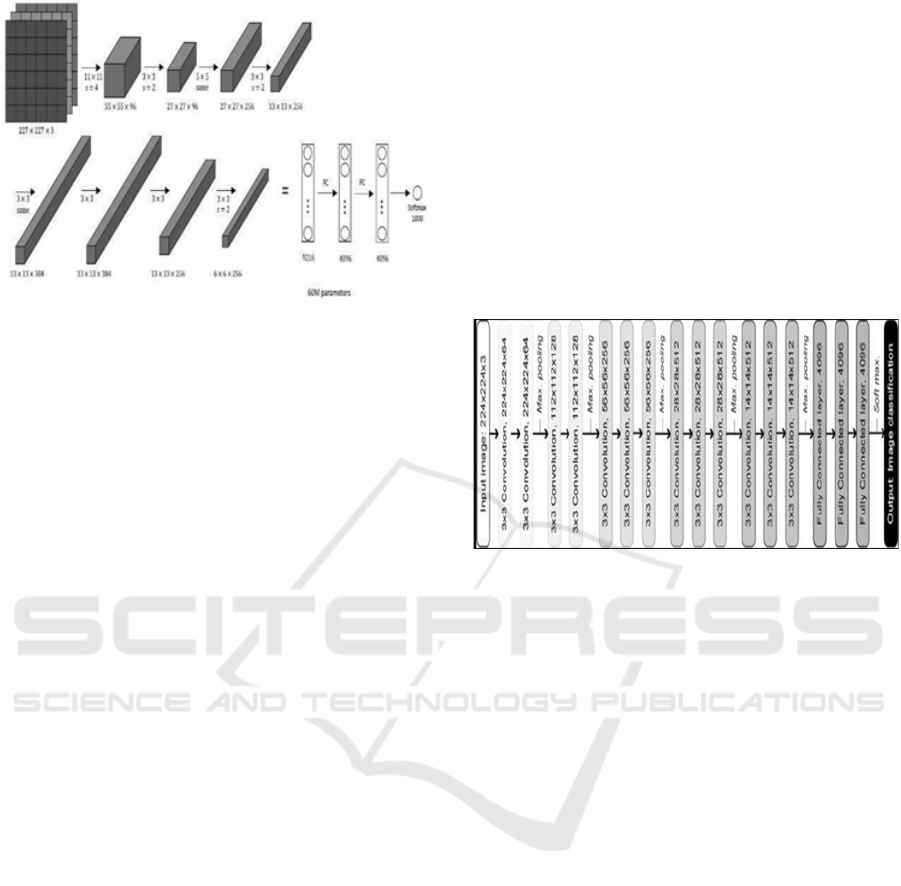
Figure 4: AlexNet Architecture
The architecture of AlexNet starts offevolved
with an input photo size of 227x227x3. the primary
layer is a convolutional layer with ninety six filters of
length 11x11 and a stride of 4. The activation feature
used on this layer is ReLU, generating an output
feature map of 55x55x96. the subsequent layer
applies max- pooling with a filter out size of 3x3 and
a stride of 2, decreasing the function map to
27x27x96. Following applying 256 5x5 filters with a
stride of one and ReLU activation to the pooling
layer, the second one convolution operation is
executed.The resulting feature map stays at
27x27x96. applying an additional max-pooling layer
with a 3x3 filter out length and 2 stride outcomes in
a characteristic map this is 13x13x256. using 384 3x3
filters, a stride of one, and ReLU activation, the 0.33
convolution layer generates a 13x13x384
characteristic map.the use of ReLU activation all
over again, the fourth convolution operation
preserves the 13x13x384 feature map length with 384
filters of size 3x3. the usage of 256 3x3 filters with a
stride of 1 and ReLU activation, the fifth convolution
layer a 13x13x256 function the subsequent of the
primary layer due to
map A final max-pooling layer is then
implemented with a filter length of 3x3 and a stride of
2, decreasing the feature map to 6x6x256. The
output is flattened and processed via absolutely
related (FC) layers following the convolutional and
pooling layers. the first FC layer has 9216 units with
ReLU activation, accompanied by using greater FC
layers, each with 4096 devices and ReLU activations.
The input picture is classified into considered one of
one thousand categories the use of a softmax
activation function inside the very last output layer,
which has 1000 devices in overall.
• output= ((Input-filter size)/ stride)+1
3.3.2 VGG16
The convolutional neural community model known
as the VGG model, or VGGNet, that helps 16 layers
is also referred to as VGG16, together with 16 layers,
which include thirteen convolutional layers and 3
fully linked layers. The VGG-sixteen is renowned for
its effectiveness and ease of use, in addition to for its
versatility in handling a range of computer
imaginative and prescient programs, inclusive of
object recognition. and image categorization. The
model is designed with a series of convolutional
layers followed via a stack of gradually deeper max-
pooling layers.
Figure 5: VGG16 Architecture
Images of 224x224 pixels can be entered into the
VGGNet. To keep the enter size for the ImageNet
opposition steady, the model creators eliminated the
middle 224x224 patches from each picture. The
convolutional regions of VGG use 33, the smallest
workable receptive discipline, to seize motion from
left to proper and as much as down. moreover, 11
convolution filters are used to transform the enter
linearly. the following factor is a ReLU unit, an
essential improvement past AlexNet that shortens
training instances. The piecewise linear feature called
the Rectified Linear Unit Activation function, or
ReLU, outputs the enter if the enter is nice and returns
zero in any other case. To hold the spatial resolution
after convolution, the convolution stride—that's the
quantity of pixels shifts over the input—is ready at 1.
ReLU is activation function of the stride.
Utilized by the VGG community's hidden layers
all.With VGG, neighborhood reaction normalization
(LRN) is generally avoided because it lengthens
schooling times and makes use of greater
reminiscence. furthermore, it would not enhance
accuracy overall.The VGGNet consists of three
absolutely linked layers. while the 1/3 layer carries
one thousand channels—one channel for every
magnificence—the primary degrees each have 4096
channels.
Automated Defect Detection in Ceramic Tiles Using Transfer Learning Models
775
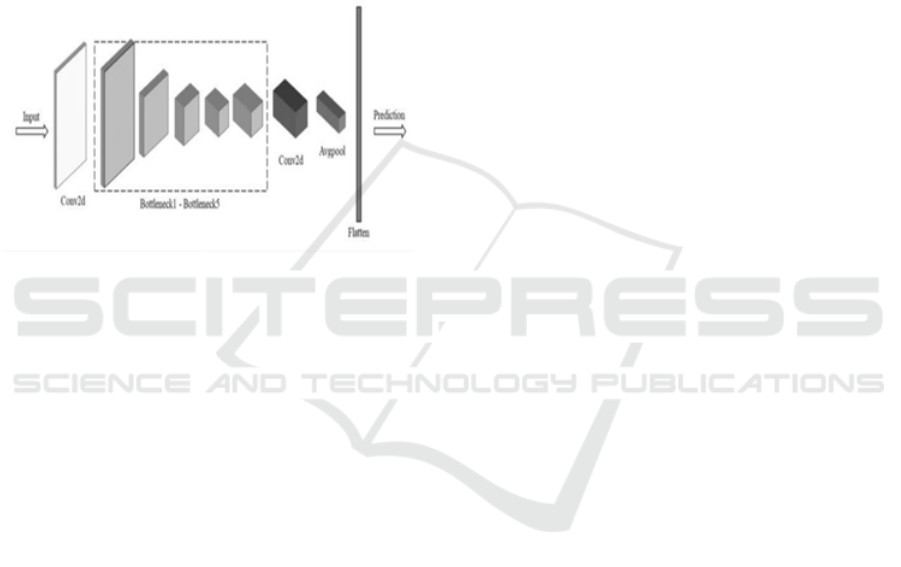
3.3.3 MobileNetV2
A pre-educated version is a community it really is
already been trained on a massive dataset and stored,
which lets in you to use it to customise your model
affordably and successfully. MobileNetV2, a
lightweight convolutional neural community (CNN)
architecture, is supposed often for embedded and cell
vision packages. It turned into created by means of
Google researchers as an improvement to the initial
MobileNetV2 version. This model's ability to
efficaciously balance model size and precision makes
it best for gadgets with limited resources, that is
another remarkable characteristic.
Figure 6. MobileNetV2 Architecture
The enter image length for the structure is
224x224x3 . the first layer is a convolutional layer
with 32 filters of length 3x3 and a stride of one,
producing an output characteristic map of
112x112x32 using the ReLU activation
characteristic. this is followed by several bottleneck
layers: the second layer has sixteen filters with a 1x1
kernel and a stride of two, lowering the function map
length to 112x112x16. The third layer applies 24
filters with a 3x3 kernel and a stride of one, keeping
the function map at 56x56x24, at the same
time as the fourth layer has 24 filters with a 3x3
kernel and a stride of 2, in addition decreasing the
scale to 56x56x24. subsequent bottleneck layers
continue this pattern: the fifth layer has 32 filters with
a 3x3 kernel and a stride of 1 for an output of
28x28x32; the 6th and 7th layers practice 32 filters
every with the same kernel length but extraordinary
strides, resulting in a discount to 28x28x32. The 8th
layer introduces 64 filters with a 3x3 kernel and a
stride of one, generating a characteristic map of
14x14x64. Layers nine through eleven practice 64
filters every, maintaining the characteristic map
length of 14x14x64. The 12th and 13th layers growth
the filters to 96, keeping the dimensions at 14x14x96.
The fourteenth and 15th layers follow 160 filters with
a 3x3 kernel and a stride of 1, resulting in a function
map of 7x7x160. in the 16th layer, 320 filters with a
1x1 kernel and a stride of one are employed. A final
convolutional layer with 1280 filters and a 1x1 kernel
produces an output feature map of 7x7x320. After
this, a international common pooling layer reduces
the characteristic map to 1x1x1280 earlier than the
structure culminates in a completely related layer
with a thousand devices and a softmax activation
feature, classifying the enter image into one among
one thousand categories.
• Algorithm for Testing Phase
4 RESULTS AND DISCUSSION
This section compares the suggested algorithm with
current techniques and examines its performance over
a range of training and testing data sizes. Accuracy
measurements are computed once the performance
metrics of the suggested method are assessed. The
methodology's resilience and efficiency are
showcased by the experimental findings, which show
that it can attain an accuracy of up to 98.2% under
ideal learning settings. Notably, the suggested
methodology was applied with Jupyter Notebook and
the Spyder IDE, utilizing key support libraries as
Matplotlib, Scikit-learn, NumPy, Pandas, and Keras.
The deep learning model's critical metrics, such as
accuracy evaluation and loss metrics, were measured
using the same tool chain. The result of with an
astounding accuracy of 98.2%, MobileNetV2 proved
to be the most effective model among those put to the
test for spotting flaws in ceramic tiles.
5 CONCLUSION AND FUTURE
WORK
This project demonstrates the potential of deep
learning, specifically Convolutional Neural Networks
(CNNs), in automating the defect detection and
classification process in the ceramic tile industry. By
employing advanced CNN architectures like
AlexNet, MobileNetV2, and VGG16, the proposed
system achieves high accuracy in identifying surface
defects, outperforming traditional manual inspection
methods. This automatic detection system can
significantly reduce errors caused by human fatigue
and subjective judgment, leading to better quality
control, reduced waste, and more efficient production
processes. Moreover, the system ensures that only
high-quality ceramic tiles are used in critical
applications, such as heritage and legacy buildings,
INCOFT 2025 - International Conference on Futuristic Technology
776

where the aesthetic and structural integrity of the tiles
is crucial. Moving forward, several improvements
can be made to enhance the model's performance and
scalability. First, integrating real-time defect
detection in production environments can be
explored, enabling manufacturers to make immediate
corrective actions. Further optimization of the CNN
model through hybrid techniques, such as combining
genetic algorithms with CNNs, can lead to more
precise results and faster computation. Additionally,
expanding the dataset to include more diverse tile
patterns and defect types will improve the model's
robustness and generalization. Lastly, incorporating
the system into a fully automated manufacturing line
with real-time monitoring and feedback will help
realize the full potential of Industry 4.0 in the ceramic
tile sector.
REFERENCES
Elbehiery. H., Hefnawy. A., Elewa, M. (2007). Surface
defects detection for ceramic tiles using image
processing and morphological techniques.
International Journal of Computer and Information
Engineering, 1(5): 1488-1492
Wan G, Fang H, Wang D, Yan J, Xie B. Ceramic tile
surface defect detection based on deep learning.
Ceramics International. 2022 Apr 15;48(8):11085-93.
Lu Q, Lin J, Luo L, Zhang Y, Zhu W. A supervised
approach for automated surface defect detection in
ceramic tile quality control. Advanced Engineering
Informatics. 2022 Aug 1;53:101692.
Hocenski Z, Vasilic S, Hocenski V. Improved canny edge
detector in ceramic tiles defect detection. InIECON
2006-32nd Annual Conference on IEEE Industrial
Electronics 2006 Nov 6 (pp. 3328-3331). IEEE.
Hanzaei SH, Afshar A, Barazandeh F. Automatic detection
and classification of the ceramic tiles’ surface defects.
Pattern recognition. 2017 Jun 1;66:174-89.
Karimi N, Mishra M, Lourenço PB. Deep learning- based
automated tile defect detection system for Portuguese
cultural heritage buildings. Journal of Cultural
Heritage. 2024 Jul 1;68:86-98.
Dong G, Pan X, Liu S, Wu N, Kong X, Huang P, Wang Z.
A review of machine vision technology for defect
detection in curved ceramic materials. Nondestructive
Testing and Evaluation. 2024 Sep 22:1-27.
Ateeq M, PP Abdul Majeed A, Hafizh H, Mohd Razman
MA, Mohd Khairuddin I, Noordin NH. A Feature-
Based Transfer Learning Method for Surface Defect
Detection in Smart Manufacturing. InInnovative
Manufacturing, Mechatronics & Materials Forum 2023
Aug 7 (pp. 455-461)
Ameri R, Hsu CC, Band SS. A systematic review of deep
learning approaches for surface defect detection in
industrial applications. Engineering Applications of
Artificial Intelligence. 2024 Apr 1;130:107717.
Martin D, Heinzel S, von Bischhoffshausen JK, Kühl N.
Deep learning strategies for industrial surface defect
detection systems. arXiv preprint arXiv:2109.11304.
2021 Sep 23.
Lian J, Jia W, Zareapoor M, Zheng Y, Luo R, Jain DK,
Kumar N. Deep-learning-based small surface defect
detection via an exaggerated local variation-based
generative adversarial network. IEEE Transactions on
Industrial Informatics. 2019 Oct 4;16(2):1343-51.
Choi SM, Cha HS. Methodology for Enhancing the
Accuracy of Defect Detection Models Through Virtual
Image Augmentation. Available at SSRN 4711763.
Prunella M, Scardigno RM, Buongiorno D, Brunetti A,
Longo N, Carli R, Dotoli M, Bevilacqua V. Deep
learning for automatic vision- based recognition of
industrial surface defects: a survey. IEEE Access. 2023
May 1;11:43370-423.
Zorić B, Matić T, Hocenski Ž. Classification of biscuit tiles
for defect detection using Fourier transform features.
ISA transactions. 2022 Jun 1;125:400-14.
Automated Defect Detection in Ceramic Tiles Using Transfer Learning Models
777
