
A Comprehensive Survey on Anomaly Detection Techniques in VANETs:
Challenges and Opportunities
Manne Naga Chandra Sekhar Chowdhary, Bandaru Rohan Satya Balaji
a
, S Sreenivasa Chakravarthi
and S Sountharrajan
b
Department of Computer Science and Engineering,
Amrita School of Computing,
Amrita Vishwa Vidyapeetham, Chennai, India
Keywords:
Vehicular Ad Hoc Networks (VANETs),Intelligent Transportation Systems (ITS), Federated Learning,
Intrusion Detection Systems (IDS), Data Manipulation Attacks, Denial of Service (DoS), Collaborative
Learning, Network Intrusion.
Abstract:
The emergence and development of Vehicular Ad Hoc Networks (VANETs) as part of Intelligent Transporta-
tion Systems (ITS) bring with them critical operational challenges, with security being paramount. Among
these, the detection of anomalies stands out as a vital task to ensure the smooth functioning of VANET commu-
nication. Anomaly detection, leveraging advanced machine learning (ML) and deep learning (DL) techniques,
has emerged as a vital solution to address these challenges. This paper presents a comprehensive survey of
recent developments in anomaly detection methods for VANETs. It investigates the supervised, unsupervised,
and hybrid learning techniques of CNNs and LSTM networks and federated learning models for anomaly iden-
tification in various scenarios. Furthermore, benchmark datasets such as KDD99, NSL-KDD, and VeReMi are
reviewed for evaluating the efficacy of these methods. This survey discusses the strengths, weaknesses, and
emerging trends within anomaly detection. One such trend is collaborative and privacy-preserving frameworks
for anomaly detection. The current work aims to provide guidance for future research in finding robust and
real-time anomaly detection systems, thus ensuring the security and reliability of VANETs in environments of
increasing complexity.
1 INTRODUCTION
VANETs, a key component of Intelligent Trans-
portation Systems, is a transforming technology for
the road safety and traffic management era. Self-
organizing networks, enabling communication be-
tween vehicles (Vehicle-to-Vehicle, V2V) and infras-
tructure (Vehicle-to-Infrastructure, V2I), have the po-
tential to share real-time information about traffic
conditions, possible danger, or other important infor-
mation. However, despite the promise of VANETs,
several critical challenges are found in this area, es-
pecially concerning secure and reliable communica-
tion. Security issues like Denial of Service (DoS),
Sybil, and position falsification attacks can compro-
mise the integrity and functionality of VANET, hence
requiring efficient anomaly detection mechanisms to
a
https://orcid.org/0009-0000-9843-5552
b
https://orcid.org/0000-0003-4248-3875
mitigate these issues.
Anomalies in VANETs manifest as irregular pat-
terns in communication, vehicle behavior, or network
infrastructure interactions. Advanced methodologies
are required to detect threats in real-time. Application
of machine learning and deep learning approaches
have been quite promising in this domain. Some of
the techniques that are used for detection are Convo-
lutional Neural Networks (CNNs), Long Short-Term
Memory (LSTM) networks, and ensemble learning
frameworks. Benchmark datasets developed for the
purpose include KDD99, NSL-KDD, and VeReMi
datasets, representing diversity in test and develop-
ment scenarios.
The evolution of the anomaly detection in
VANETs is perpetual, and it has traditionally inte-
grated hybrid frameworks that blend statistical anal-
ysis with machine learning models to improve the
accuracy of detection while reducing false positives.
644
Chowdhary, M. N. C. S., Balaji, R. S. B., Chakravarthi, S. S. and Sountharrajan, S.
A Comprehensive Survey on Anomaly Detection Techniques in VANETs: Challenges and Opportunities.
DOI: 10.5220/0013583200004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 1, pages 644-655
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

For instance, more recent studies demonstrated col-
laborative learning techniques in distributed environ-
ments can be effective to enable vehicles to col-
laborate and detect threats. Federated learning and
privacy-preserving methods have further contributed
to advanced state-of-the-art against data security with
robust anomaly detection capabilities.
The literature survey will be aimed at an integrated
view of all the recent advances in anomaly detection
in VANETs, including strengths, weaknesses, and fu-
ture research directions. Through the synthesis of
findings from highly impacting studies, we contribute
further to understanding how emerging technologies
can mitigate security threats in these dynamic and de-
centralized networks.
2 RESEARCH METHODOLOGY
The approach to research for this survey paper delves
into the recent developments and datasets, consider-
ing the fast-growing area of anomaly detection in ve-
hicular ad hoc networks (VANETs). This research
seeks to assess the merits and demerits of machine
learning and deep learning as well as combined ap-
proaches in identifying anomalies, more specifically,
misbehaviour in VANETs. There were also met-
ric and non-metric and dataset approaches studied to
present the other side of the coin in the scope. Our
research process commenced with comprehensive re-
search targeted towards various high-ranking journals
and publications including Elsevier, IEEE, Springer
and MDPI among other. Such wide-ranging survey of
the literature allowed us to synthesize, evaluate and ex
tract important information, thereby converting unre-
fined data into useful knowledge. A pru dent selection
of the most appropriate works was made to ensure that
the study was adequately grounded.
2.1 Research Questions
In this section, we will present the research questions
that were the focus of our investigation. These
questions were the principal guide nay the blueprint
of our analysis that helped us not to deviate from
the main purpose and issues regarding the anomaly
detection in VANETs.
• RQ1: What are the current machine learning-
based approaches to misbehaviour detection in
VANETs, and what are their drawbacks?
• RQ2: What remedial measures and approaches
can be adopted for data bias mitigation in the con-
text of VANETs to improve the effectiveness and
equity of detection of different kinds of vehicular
misbehaviours?
• RQ3: How do the malfunctions of physical sen-
sors mounted on vehicles cause the failures of the
VANETs?
• RQ4: What motivates most of the research on
misbehaviour in VANETs into position falsifica-
tion, and why is it of great concern globally to
vehicular safety?
• RQ5: What are the major features or data points
that play the greatest role in the effective detection
of anomalies in VANETs?
• RQ6: How can the anomaly detection capability
of vehicles in a VANET be improved with the use
of collaborative learning techniques?
These questions help us define the scope of our
evaluation of the anomaly detection field as well as
provide an overview on its state and trends.
3 BACKGROUND ON VANETS
VANETs represent an advanced type of mobile ad-
hoc networks (MANETs). They allow vehicles to suc-
cessfully communicate both with each other as well as
with roadside infrastructure. This makes it possible
to implement any range of applications: from safety
to traffic applications and even infotainment ones.
However, the operational definition of VANETs also
brings about some odd security issues and threats.
3.1 Overview of VANET architecture
VANETs enable vehicle-to-vehicle communica-
tion (Vehicle-to-Vehicle or V2V) and vehicle-
to-infrastructure communication (Vehicle-to-
Infrastructure or V2I) as shown in the figure.
Vehicles in VANETs are essentially nodes of a mov-
ing network that keeps on changing along with the
change in locations. Such nodes exchange important
information such as the speed of the vehicle, position,
or traffic conditions. Dedicated Short Range Com-
munication protocols, wireless access in vehicular
environments, and cellular networks, such as 5G,
are the major enablers for VANET communication
(Guerrero-Ib
´
a
˜
nez et al., 2013).
1. On-Board Units (OBUs): On Board Units are in-
stallation devices in vehicles, which have capabil-
ities fitted for wireless communications, Global
Positioning System, and other sensor systems.
A Comprehensive Survey on Anomaly Detection Techniques in VANETs: Challenges and Opportunities
645
The OBUs make possible Vehicle-to-Vehicle
(V2V) and Vehicle-to-Infrastructure (V2I) com-
munications, through which certain information
like vehicle position, speed, and environmental
data can be exchanged (He, 2024).
2. Roadside Units (RSUs): RSUs are fixed infras-
tructure elements placed on roadsides or at inter-
sections. An RSU extends network coverage, al-
lows for communication between distant vehicles,
and supplies services such as traffic signal con-
trol, toll collection, and access to internet services
(Shakir et al., 2024).
3.2 Types of communication
• Vehicle-to-Vehicle (V2V) Communication: Di-
rect communication among vehicles will enable
them to share real-time information about traffic
conditions, potential hazards, and other relevant
data in order to improve road safety and traffic
management.
• Vehicle-to-Infrastructure (V2I) Communica-
tion: It helps make interaction between vehicles
and fixed infrastructure elements such as traffic
lights and road signs, as well as central traffic
management, possible. Such communication op-
timizes the flow of traffic, reduces congestion, and
increases safety along the roads.
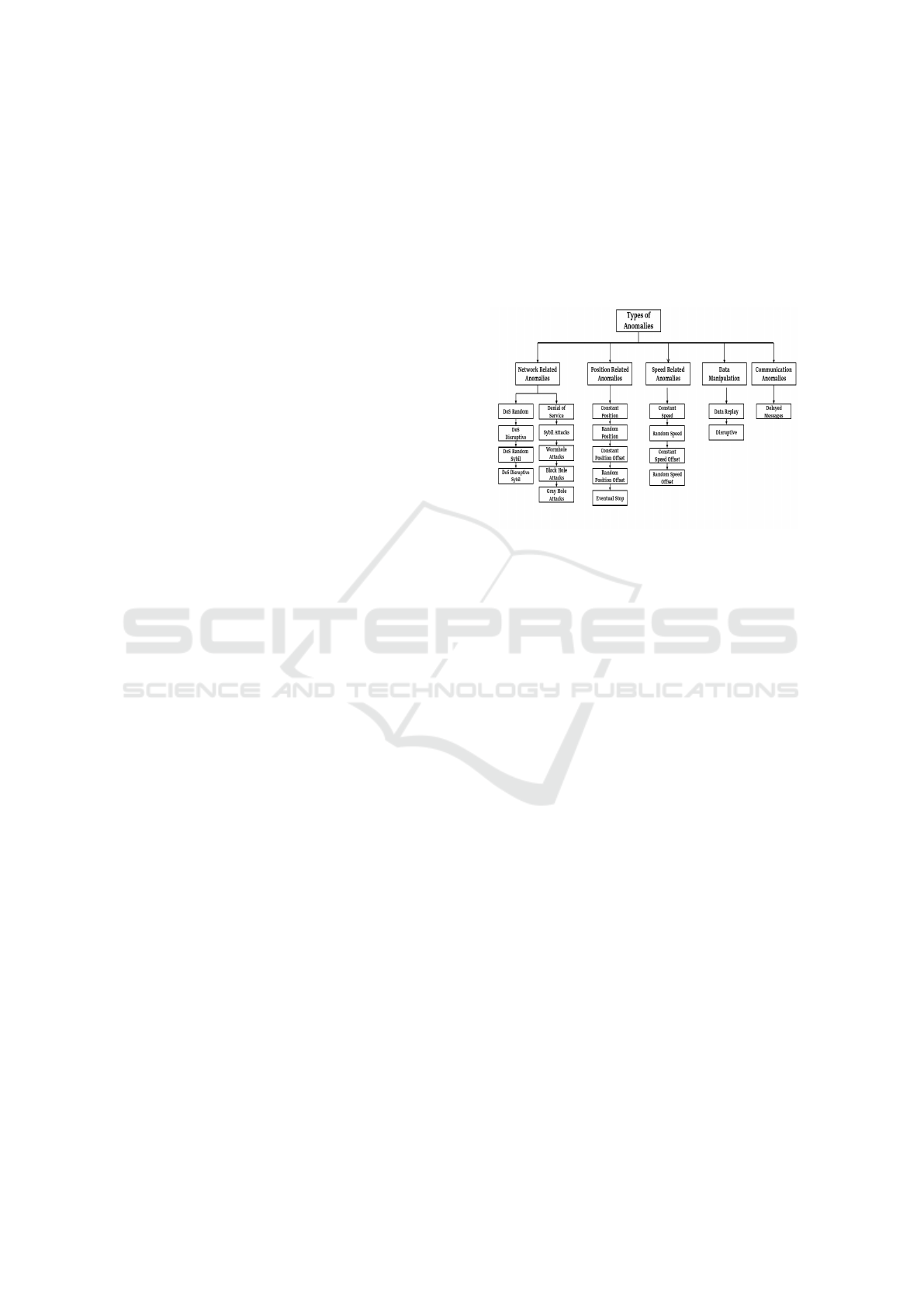
3.3 Types of Anomalies
Figure 1 describes a hierarchical classification of
anomalies in VANETs according to the nature and
impact they have. Anomalies are classified into five
major types, including Network-Related Anomalies,
Position-Related Anomalies, Speed-Related Anoma-
lies, Data Manipulation, and Communication Anoma-
lies.
Network-related anomalies include DoS attacks,
Sybil attacks, Wormhole attacks, Black Hole attacks,
and Gray Hole attacks, each designed to violate net-
work integrity through communication. Position-
related anomalies include incidents like Constant Po-
sition, Random Position, Constant Position Offset,
Random Position Offset, and Eventual Stop, all of
which hinder the precision with which a vehicle is
positioned. Anomalies related to speed include ir-
regularities such as Constant Speed, Random Speed,
Constant Speed Offset, and Random Speed Offset,
likely creating a problem of miscommunication or
even causing a traffic hazard. Data manipulation com-
prises Data Replay and Disruptive anomalies where
the adversary re - sends or manipulates data with-
out authorization to create chaos. Communication
anomalies include Delayed Messages whereby a le-
gitimate message is delayed, which is time sensitive
for VANET communications.
It further depicts the multifaceted and wide variety
of threats that exist under this hierarchical structure
in VANETs, showing emphasis and gravity for strong
anomaly detection systems in vehicular networks to
ensure security and reliability.
Figure 1: Anomalies Identified in the Survey.
4 SURVEY OF RELATED WORK
4.1 Network Anomalies Related Work
The paper ”Detecting Sybil Attacks Using Proofs of
Work and Location in VANETs” (Baza et al., 2022)
introduces a new method based on the amalgamation
of proofs of work and location to detect Sybil attacks.
It uses threshold signatures from RSUs, coupled with
vehicle trajectory analysis to prevent RSU compro-
mise attacks. Simulations, based on a dataset moti-
vated by Nashville, TN, have 160 vehicles whereby
10% are malicious entities. A Proof of Work algo-
rithm and maximum clique analysis is used to detect
the Sybil nodes. The proposed approach reduces the
FNR and detection time up to 50% compared to the
previous approaches, while maintaining low commu-
nication and computational overhead.
Haowen Tan et al. (Tan et al., 2018) proposed a
certificateless authentication scheme integrated with
unsupervised anomaly detection for VANETs, which
focuses on DoS attacks and traffic flow anomalies.
The scheme makes use of certificateless cryptography
with no pairing operations. It uses the Chinese Re-
mainder Theorem for efficient group key distribution
and dynamic time warping to detect anomalies. Se-
curity analysis and evaluation of performance attest
that the approach results in strong security as well as
efficiency better than the existing ones.
INCOFT 2025 - International Conference on Futuristic Technology
646

Nikita Lyamin et al. (Lyamin et al., 2018) pre-
sented real-time detection of jamming DoS attacks
in VANET, with a focus on platooning application.
A hybrid detection approach coupling the statistical
analysis with data mining techniques is proposed to
identify jamming in real time even with random jitter
in cooperative awareness messages. The simulation
results have shown that the method is efficient for de-
tecting both random and ON-OFF jamming strategies
over different sizes of the platoon.
Nie et al. (Nie et al., 2019) proposed a generalized
anomaly detection framework for VANETs target-
ing PHY-layer spoofing, jamming, and DDoS attacks.
The method exploits spatiotemporal traffic character-
istics and sparsity modeled using a CNN architec-
ture. A loss function based on Mahalanobis distance
and reinforcement learning enhances the precision of
detection. Although the specifics of the dataset are
not mentioned, the simulations validate the method.
The framework achieves over 90% accuracy and pre-
cision across various observation durations, with low
false alarm rates, demonstrating robust and reliable
anomaly detection.
Shu et al.(Shu et al., 2021) performed an experi-
ment that utilized CIDS on two datasets: KDD99 and
NSL-KDD. From the output, it is easy to infer that
collaborative CIDS perfectly outperforms IndiDetec-
tion without fairly having any higher system over-
heads while nearly performing equally well as Cent-
Detection. In the case of the KDD99 dataset, CIDS
attains a surprisingly high accuracy level, which is
98.38% for SDN3, precision showing efficient de-
tection capabilities within varied network scenarios
(95.14% for SDN3). For the NSL-KDD dataset,
CIDS is robust in all aspects with an accuracy reach-
ing 96.75% for SDN3, precision at 91.83%. These
metrics imply that CIDS is efficient in terms of
achieving balance between detection accuracy and
complexity with the way it reduces computational and
communication, hence making it feasible for this kind
of distributed intrusion detection within VANETs.
The paper, ”Intelligent Hierarchical Security
Framework for Vehicular Ad Hoc Networks”*
(Goncalves et al., 2021) introduces a multi-level ar-
chitecture to enhance VANET security and attack de-
tection. The framework consists of four levels: in-
dividual vehicles (L0), vehicle clusters (L1), road-
side units (L2), and backend servers (L3). Each layer
leverages localized machine learning; for instance, L0
relies on lightweight decision stumps, L2 adopts Ran-
dom Forest to achieve better results, and L3 resorts
to the ensemble technique, such as MLP or J48, but
with higher complexity. The VPKIbrID model en-
sures safe and confidential communication between
entities. Custom datasets, developed using SUMO
and NS-3, have shown effective results in detecting
DoS attacks. This hierarchical approach integrates
security and attack detection efficiently, while each
node takes benefit from its strong capabilities.
The paper, ”A New Multivariate Approach for
Real Time Detection of Routing Security Attacks in
VANETs (Ajjaj et al., 2022) proposes a Multivariate
Statistical Detection Scheme (MVSDS) for detecting
black hole attacks in VANETs. The method applies
multivariate normality tests without changing the ex-
isting routing protocols, therefore considering the
traffic metrics like throughput, dropped packet ratio,
and overhead traffic ratio. Techniques used are Min-
Max Normalization and tests of the kind of Rao-Ali
and Ryan-Joiner for anomaly detection. Simulations
using SUMO and NS-3 confirm that MVSDS effec-
tively identifies black hole attacks as it is an efficient
technique with a high sensitivity and which detects
performance degradation, namely, reduced through-
put and increased packet loss.
Abderrahim Benslimane et al. (Agrawal et al.,
2022) proposed a deep learning-based intrusion de-
tection system (IDS), NovelADS, that was designed
to detect anomalies in intra-vehicular networks us-
ing the CAN protocol. Its focus attacks include
DoS, Fuzzy attacks, RPM Spoofing, and Gear Spoof-
ing. NovelADS uses sequence-level classification and
spatio-temporal analysis of legitimate network mes-
sages to detect deviations causing attacks. NovelADS
uses techniques such as thresholding and error recon-
struction along with a novel statistical method for au-
tomated threshold determination, which reduces man-
ual intervention. Different architectures of neural net-
works are trained to enhance detection efficiency, es-
pecially in the case of Fuzzy attacks, exhibiting near-
perfect precision (0.9995), recall (0.9991), and F1-
score (0.9993). This approach performs well in cases
of other attack types as well by outperforming tradi-
tional approaches.
Among the attacks identified in the paper(Shams
and Ulusoy, 2020) on DoS attacks in VANETs is
the intrusion detection system using a Support Vector
Machine that consists of packet dropping and delay-
ing attacks which disturb the communication in the
network and bring risks to vehicular safety. This ex-
periment utilizes a custom dataset created using com-
puter simulation of both normal and malicious pat-
terns of traffic in a realistic mobility vehicular envi-
ronment. The proposed IDS, in fact, uses SVM as a
core algorithm that performs anomaly detection. The
detection of probable intrusions takes place at the re-
ceiving vehicle by analyzing the packet arrival pat-
tern, and, in this case, feature selection is conducted
A Comprehensive Survey on Anomaly Detection Techniques in VANETs: Challenges and Opportunities
647
to identify those attributes which are critical for DoS
attacks detection. Results from SVM-based approach
are compared with other classifiers; the method used
here signifies major improvement.
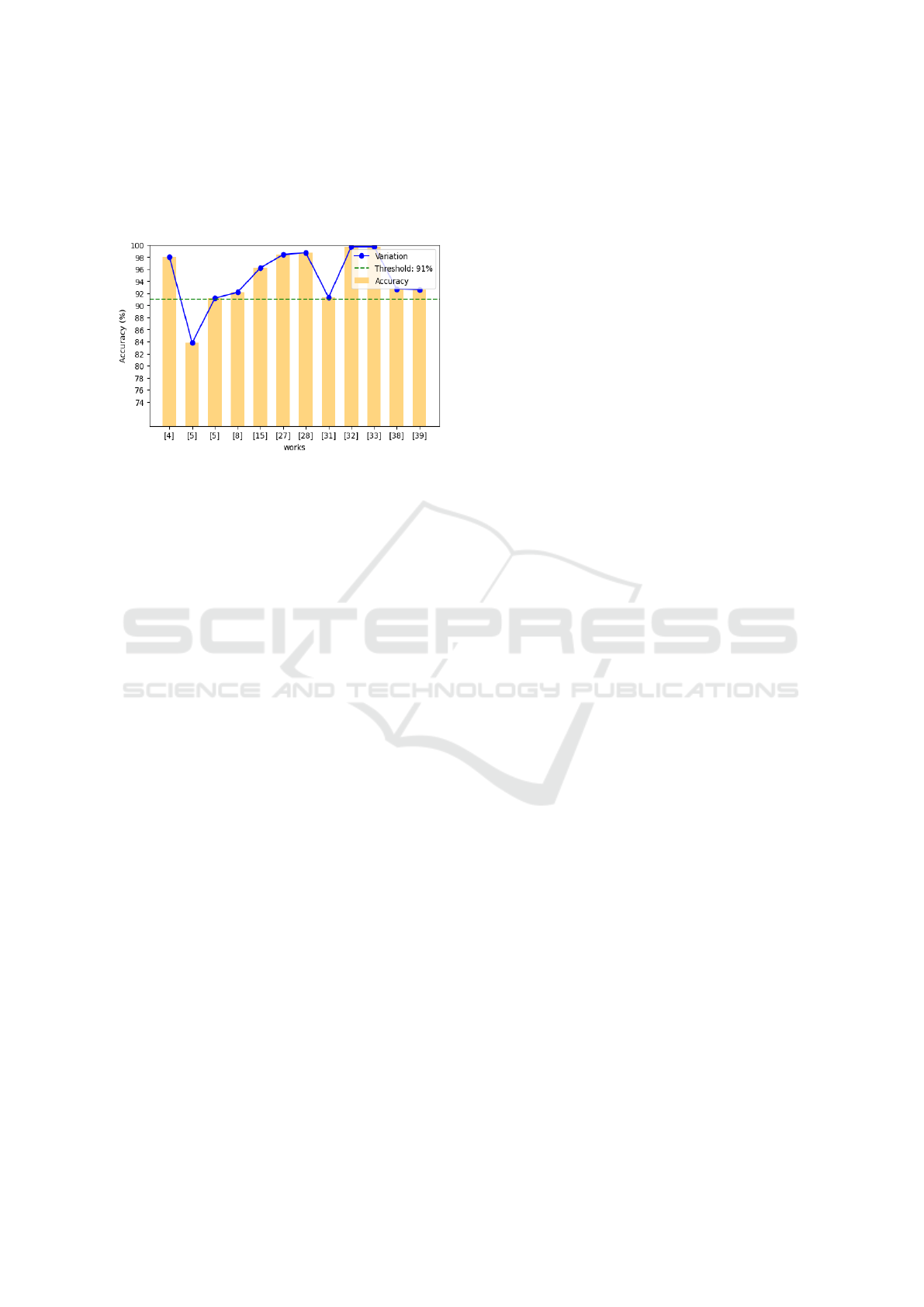
Figure 2: Accuracy achieved in various woks
The paper by Nabil Nissar et.al(Nissar et al.,
2024) It is stated that there exists a wide range of
cyber threats in VANETs, specially zero-day attacks
and dynamic anomalies. A framework of Variational
Autoencoders is presented for anomaly detection,
and the objective functions dealt within this present
work comprise of KL-divergence together with recon-
struction error, and two optimization algorithms are
used- AGE-MOEA and R-NSGA-III. Due to the car-
ried study, it has been mentioned that the accuracy
and precision rate for the R-NSGA-III has achieved
90.02% and 92.98% respectively. The results in case
of AGE-MOEA are also competitive enough with an
accuracy of 88.37% and a precision rate of 92.69%.
In order to hinder wormhole and black hole at-
tacks in VANET environments, Boya Liu et al.(Liu
et al., 2023) presented federated learning that incor-
porates a reward mechanism with trust values. Apart
from this, the approach utilizes homomorphic en-
cryption for defense against privacy breaches and at-
tacks. The research work has allocated lossless tree
enhancement technique that achieves its goal via fed-
erated learning, which has put emphasis on methods
to select nodes and model gradients aggregation.
Gurtej Kaur et al. (Kaur et al., 2022) presents
another work on the analysis of the AODV routing
protocol to show the performance of Gray hole at-
tacks in VANETs by considering some metrics such
as throughput, PDR, NRL, and delay. The algorithm
developed is for Nack with Smart Neighbourhood-
Hole Recovery (NSN-H) with respect to the ensured
message transmission with efficient reliable commu-
nication while considering the minimal possible de-
lay.
Thuvva Anjali et al. (Anjali et al., 2024) pro-
posed a two-tier strategy that mitigates DoS attacks
in VANET by targeting two types of threats: external
and internal threats. This strategy enhances security
by allowing the verification of identities of communi-
cation entities through the creation of signatures de-
rived from private and public keys.
M Poongodi et al. (Poongodi et al., 2019) pro-
posed a trust-based framework to mitigate the issues
confronted in VANETs due to DDoS attacks, wherein
it clusters the nodes with trust scores and a genetic al-
gorithm can be put in place to adaptively structure in
a hierarchical fashion to better improve routing effi-
ciency in the light of identifying malicious nodes. It
has significant network performance improvements.
The KDD Cup 99, NSL-KDD, CICIDS2017, and
UNSW-NB15 benchmark datasets have been used in
many studies for developing and evaluating models
for intrusion detection, anomaly detection, and mis-
behaviour detection in VANET communications with
the purpose of mitigating network-related threats. Be-
cause of the heavy use of a huge dataset, these
datasets contain exhaustive ranges of attack scenarios
and normal traffic patterns.
The work by Alsarhan et al. (Alsarhan et al.,
2021) presents an SVM-based intrusion detection sys-
tem for VANETs optimized using Genetic Algorithm
(GA), Particle Swarm Optimization (PSO), and Ant
Colony Optimization (ACO). It ensures the experi-
mental results over the KDD99 dataset with the ac-
curacy of 98% and the detection rate of 99%. Such
optimizations enhance the accuracy of the SVM clas-
sifier. KDD99 dataset is the widely used benchmark
to assess intrusion detection systems. It includes both
regular activities and different types of attacks such
as DoS, probing, User to Root (U2R), and Remote to
Local (R2L) attacks in synthetic data of the network
traffic.
An anomaly-based system for VANETs by using
K-means clustering and fuzzy set theory was pre-
sented in a study by Rafsanjani et al. (Kuchaki Raf-
sanjani et al., 2021). It includes a 0.97 detection rate
for DoS attacks, with 0.99 precision and an F-measure
value of 0.98. The integration of the two modules of
clustering and fuzzy logic supports effective anomaly
identification.
In research study by AlMahadin et al. (Aoudni
et al., 2024) talks about anomaly detection in VANET
network traffic using a GRU-based deep learning
model in evaluating the SEMI-GRU with the NSL-
KDD dataset. The outcome of the experiment reveals
that the 5-layer and 8-layer models are performing
the best, with the highest accuracy being provided by
the 5-layer model as 83.79%. SMOTE oversampling
technique has been utilized for tackling class imbal-
INCOFT 2025 - International Conference on Futuristic Technology
648
ance within the dataset. However, the method pre-
sented in this work is computationally intensive.
In Gyawali et al. (Gyawali et al., 2020), a method
that used a fusion of Random Forest and Dempster-
Shafer theory for misbehaviour detection in vehicu-
lar networks is proposed. The labelled datasets were
obtained by simulating the Veins framework in OM-
NET++. It achieved a precision of 0.99, recall of 0.96,
and an F1-score of 0.97, particularly in constant po-
sition attacks. On the other hand, the conclusion of
the study is that although the cryptographic method
seems quite effective, due to the susceptibility of ve-
hicular networks to internal attacks, even the legiti-
mate network nodes can become a threat to the overall
network. The detection also seems pretty dependent
upon feedback received from the vehicles.
Bangui et al. (Bangui et al., 2021) proposes a
hybrid data-driven model for intrusion detection in
VANETs. It combines two important parts: firstly,
making use of a classification algorithm, identifies
known attacks, and secondly, utilises an anomaly de-
tection approach based on the coresets technique to
filter dishonest nodes from being considered within
cluster-based filtering. This two-phased strategy re-
flected an excellent accuracy of 96.93% and F1-score
of 94.41%, marking a tremendous progress for the
real-time IDS of VANETs. However, it was not
that comprehensive to include all kinds of attacks in
VANETs and therefore would require greater refine-
ments to fight more complex attack scenarios.
Baharlouei et al. (Baharlouei et al., 2024) de-
signed a real-time anomaly and attack detection sys-
tem in the VANET using XGBoost and federated
learning. Each vehicle trains an XGBoost model lo-
cally, enabling efficient detection of malicious behav-
ior and attacker identification. It provided a detec-
tion rate of 99.66% along with a false negative rate
of 0.72%. Simulations were performed for several
cities with attacker densities ranging from 5% to 30%
in each; the simulations ran for 3600 seconds, which
is equivalent to 24 hours. Although this method has
promising results, applying it to real-world applica-
tions is quite complex due to the variety of vehicular
environments.
Kumar et al. (Kumar and Chilamkurti, 2014) in-
troduced T-CLAIDS, a Trust-based Collaborative In-
telligent Intrusion Detection System for detecting ma-
licious activities in VANETs. The system uses a Col-
laborative Trust Index (CTI) to enhance its classifier’s
effectiveness across various attack scenarios. It com-
bines Learning Automata (LA) for vehicle state mon-
itoring and a Markov Chain Model (MCM) to model
state transitions, achieving a high detection rate of
99% and a packet delivery ratio of 98%. While ef-
fective in dynamic vehicular environments, its per-
formance may degrade in highly variable or sparse
network conditions and against sophisticated attack
types.
Garg et al. (Garg et al., 2019) designed Sec-IoV, a
multi-stage anomaly detection scheme in the Internet
of Vehicles (IoV). The authors have employed a hy-
brid optimization of an SVM classifier’s parameters
to boost the accuracy of the classifier with an oper-
ator derived from the mutation of the Artificial Bee
Colony optimization, namely, Cauchy-based muta-
tion operator (C-ABC). Simulations were performed
over OMNET++ and SUMO environments with re-
spectively high detection rates and accuracy. How-
ever, Sec-IoV faces scalability challenges and has
been validated only in limited real-world scenarios,
raising concerns about its effectiveness against di-
verse attack types.
Table 1: Overview of Intrusion Detection Systems in
VANETs
Work Method Results Strengths Weaknesses
[3] Semi-supervised
VAEs for intrusion
detection
99.46%
Accuracy
Robust to at-
tack strategies
Struggles with
novel attacks
[4] SVM optimized
with GA, PSO,
ACO
98% Ac-
curacy
Enhanced pre-
cision
Limited appli-
cability to real-
world data
[5] GRU with SMOTE
for class imbalance
83.79%
Accuracy
Effective for
sequential data
High computa-
tional demand
[6] Random Forest with
Dempster-Shafer
theory
0.99 Pre-
cision
Effective for
specific attack
detection
Reliance on
feedback data
[9] Federated learning
with XGBoost
99.66%
Accuracy
Data privacy,
distributed
detection
Complexity
in diverse
environments
[15] Hybrid data-driven
model
96.93%
Accuracy
Reduces false
positives
May not cover
all attack types
[23] Statistical analysis
for jamming detec-
tion
Efficient
in jam-
ming
detection
Robust to ran-
dom jitter
Limited to
simple attack
scenarios
[25] Spatiotemporal
modeling with CNN
90% Ac-
curacy
Integrates
reinforcement
learning
Lacks dataset
details
[27] CIDS evaluated on
KDD99
98.38%
Accuracy
Effective for
distributed
detection
Degrades in
complex sce-
narios
[29] Proof of Work and
Location for Sybil
attacks
Reduced
FNR by
50%
Effective
against RSU
compromises
Requires reli-
able RSU net-
work
[36] NovelADS for
fuzzy attacks detec-
tion
Precision
0.9995
Near-perfect
detection rates
Needs adapta-
tion for real-
world use
A Comprehensive Survey on Anomaly Detection Techniques in VANETs: Challenges and Opportunities
649

4.2 Position anomalies Related work
Yang et al.(Yang et al., 2023) discusses Connected
and Autonomous Vehicles GPS spoofing detection by
using Learning from Demonstration (LfD) framework
along with Maximum Entropy Inverse Reinforcement
Learning (ME-IRL) to model normal driving behav-
ior with decision tree classifier based on objective ra-
tio and trajectory displacement as feature for identi-
fying anomalous behavior. The approach is tested on
both KAIST and Michigan datasets where strong per-
formance is seen in terms of detection with low false
positive and false negative rates and prove to be ro-
bust against stealthy attacks. However, it can detect
known attacks and relies on labeled attack data for
training and focuses on detection but does not have
any mitigation strategies.
Secil Ercan et al. (Ercan et al., 2022) present
a distributed intrusion detection system for position
falsification attacks in VANETs, such as Constant,
Constant Offset, Random, Random Offset, and Even-
tual Stop attacks. The features presented in the sys-
tem are AoA, RSSI-based estimated distance, and de-
clared vs. estimated distances, which advance the
system with much better detection of events. Using
the VeReMi dataset the improved accuracy, F1-score,
and computation time across different types of attacks
and traffic densities. The machine learning techniques
kNN and Random Forest in a Stacking ensemble yield
an accuracy of 83.6% in low, 91.5% in medium, and
92.2% in high traffic density conditions.
In the paper ”Anomaly Detection for Internet of
Vehicles: A Trust Management Scheme with Affin-
ity Propagation”, Shu Yang et.al(Yang et al., 2016)
proposed an anomaly detection scheme in IoV. The
two types of anomalies that are targeted by the study
are, on one hand, malicious vehicles the intent of
which is harmful and on the other incapable vehicles
whose action causes disorder without their intent. The
Cluster-Based Anomaly Detection introduces cluster-
based and central reputation components for manag-
ing trust dynamically and in the long run. The CAD
approach generally involves cluster building, abnor-
mal behavior detection within clusters, and election
of cluster heads for managing trust management. It
uses affinity propagation as the foundation for clus-
tering along with trust evaluation. Simulation proved
that this system had a very low failure rate in detecting
abnormal vehicles with less than 1%.
Alladi et al. (Alladi et al., 2021) presented a deep
learning-based framework, DeepADV for anomaly
detection in VANETs. The CNN-LSTM configura-
tion was found to be highly accurate with 98.4% ac-
curacy in faults, 98.7% in attacks, and 98% in com-
bined anomalies. DeepADV uses sequence recon-
struction via a thresholding algorithm along with fea-
tures like position coordinates and speed. The frame-
work successfully detects subtle anomalies such as
Constant Position Offset faults, Delayed Messages,
and Eventual Stop attacks. This performance was val-
idated through extensive experimentation over differ-
ent types of anomalies, signifying the adaptability to
unknown anomalies without the need for retraining.
Furthermore, the deployment on Nvidia Jetson Nano
hardware further illustrates its real-time applicability
in VANET environments.
Steven So et al. (So et al., 2018) presents a frame-
work in which plausibility checks are incorporated
as a feature vector for the machine learning models,
SVM and KNN, to enhance the accuracy of misbe-
havior detection by as much as more than 20% within
a recall of within 5%. They introduced new features
like average distance and average velocity, which are
derived from the distance reported by the GPS loca-
tion and reported velocities by the sender.
What Pranav Kumar Singh et al.(Singh et al.,
2019) added to the features were the difference be-
tween the sender and receiver positions/speed in de-
tecting certain types of attacks. The authors found out
that position was important for differentiating attack-
ers from legitimate vehicles, since all types of attacks
were based on position falsification, which caused
different trends in the values of position
The Hybrid Position Forger Attack Detection al-
gorithm by Shahid (Shahid and Jaekel, 2023) intro-
duces a novel hybrid approach to detecting position
forgery attacks in Connected Vehicles, making use of
the Veremi dataset. By combining the techniques of
machine learning with plausibility checks, the HP-
FAD approach increases the accuracy of detection
compared to earlier existing approaches and yields a
considerably high F1-score of 99.40%. This approach
precisely targets attacks that come in the form of po-
sition forgery attacks in BSMs; thus, it is an effective
solution to targeted anomaly detection.
Other authors (Behravan et al., 2022) used stack-
ing ensemble learning to improve misbehaviour de-
tection in VANETs by using the Veremi dataset. In
this research, five kinds of position falsification at-
tacks: constant, constant offset, random, random off-
set, and eventual stop attacks-have been addressed,
which ultimately gives a holistic view of the threat.
In fact, the authors come up with two stacking-based
detection systems: one is based on traditional clas-
sifiers (Logistic Regression, K-NN, Decision Trees,
Naive Bayes) and the other on neural networks. Each
of the above is designed to classify misbehaving vehi-
cles with higher accuracy by considering the fact that
INCOFT 2025 - International Conference on Futuristic Technology
650
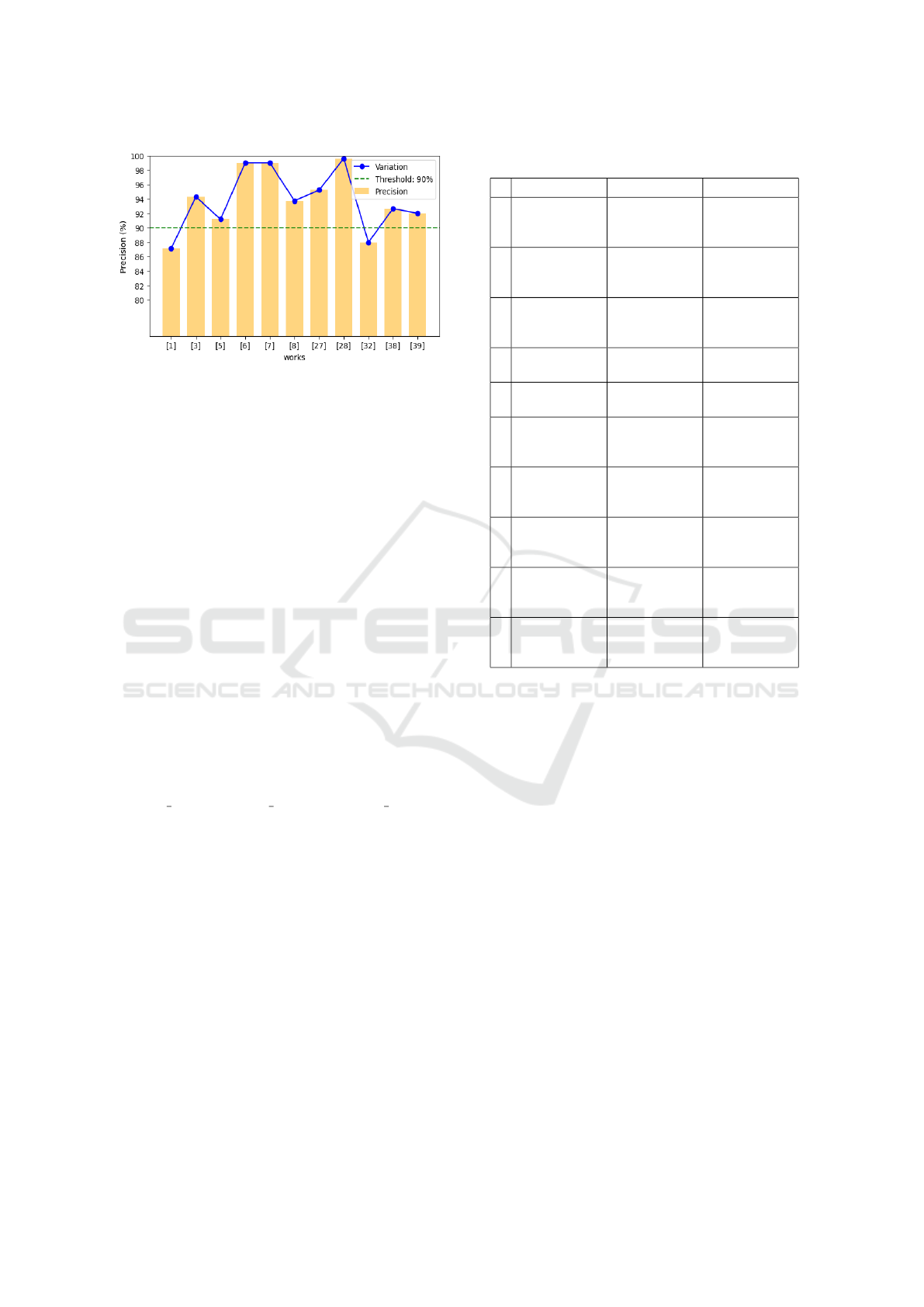
Figure 3: Precision values achieved in various works.
each attack is different.
In this study, Liu (Liu, 2022) has investigated the
application of LSTM networks toward detecting mis-
behaviour in VANETs. The study utilizes the Veremi
dataset and would focus on developing classification
models to identify different types of communication
anomalies using deep learning models. This is quite a
different approach from traditional machine learning
as proposed thus far to identify and characterize dif-
ferent types of improper communication behaviors in
vehicular networks.
A new approach of classification called the One
vs. All Binary Tree (OVA-BT) was presented by
Slama (Slama et al., 2023) to deal with imbalanced
datasets in detecting misbehaviour in VANETs with
accuracy metrics across the Veremi dataset. In this
method, the approach uses a binary classifier to any
class type of misbehaviour and during the classifica-
tion phase, ensures both classes are dealing with equal
importance, majority and minority classes. The study
has indicated remarkable improvements in accuracy
in most classifiers by using the OVA-BT approach,
as KNN OVA-BT, SVM OVA-BT, and RF OVA-BT
have improved precision values up to 10%, 20%,
and 4%, respectively, compared with traditional ap-
proaches.
Bayan’s (Bayan et al., 2024) work talks about a
decentralized Deep Learning-based Intrusion Detec-
tion System (DL-IDS). This system utilizes a Multi-
Layer Perceptron MLP for detecting the position fal-
sification attacks occurring in inter-vehicle networks,
using the dataset of Veremi. The proposed system
successfully detects multiple position falsification at-
tacks and achieves F1 scores of 93, 94, and 92 for
different attack scenarios. The innovative features at
its core are the aggregation of RSSI from first-hop
neighbors and TDoA, which are found to be essen-
tial in improving false position detection accuracy and
strengthening the security of VANETs.
Table 2: Research Highlights on Detection Techniques for
Position Falsification Attacks
WorkMethod Strengths Weaknesses
[34] Distributed intrusion
detection for position
falsification attacks
Novel features im-
prove detection capa-
bility
Limited to specific
attack types
[28] Cluster-Based
Anomaly Detection
in IoV
Dynamic trust man-
agement
Complexity in real-
world scenarios
[28] DeepADV frame-
work with DNN
architectures
High adaptability for
various anomalies
Some anomalies are
subtle and may go
undetected
[1] SVM and KNN with
plausibility checks
Effective feature en-
hancement
Limited to specific
vehicle scenarios
[2] Position/speed differ-
ence as a feature
Improved detection
capability
Potential for false
positives
[42] Hybrid Position
Forger Attack Detec-
tion (HPFAD)
Robust against posi-
tion forgery attacks
Targeted approach
limits generalizabil-
ity
[43] Stacking ensemble
learning for misbe-
havior detection
Comprehensive so-
lution for security
threats
Complexity in classi-
fier selection
[44] LSTM networks for
misbehavior detec-
tion
Advanced catego-
rization of behaviors
Requires substantial
data for training
[46] One vs. All Bi-
nary Tree (OVA-BT)
method
Effective for imbal-
anced datasets
Performance vari-
ability across classi-
fiers
[47] Deep Learning-based
Intrusion Detection
System (DL-IDS)
Effective use of inno-
vative features
May struggle with
new attack vectors
4.3 Hybrid
Zaidi et al. proposed in (Zaidi et al., 2016) a host-
based IDS specifically for detecting nodes that pro-
duce false information attacks in VANETs. This sys-
tem processes the received data based on statistical
methods instead of trust or reputation metrics. Simu-
lations are conducted using OMNET++, SUMO, and
VACaMobil, with various traffic and rogue node con-
figurations. Key parameters of vehicle such as speed
and density are analyzed. The IDS utilizes hypoth-
esis testing, utilizing the t-test to compare the re-
ceived parameters against expected values based upon
Greenshield’s traffic flow model. Thus, data collec-
tion can be cooperative among vehicles, and a dis-
tributed IDS architecture can be realized. Simulation
results demonstrate this technique’s effectiveness, in-
cluding a high true positive rate in the presence of up
to 30% rogue nodes and a false positive rate that re-
mains low at up to 20% of rogue nodes, surpassing
existing techniques.
Omessaad Slama et al. (Slama et al., 2022) in their
study discussed feature selection methods, such as
Recursive Feature Elimination, F-test Anova to avoid
A Comprehensive Survey on Anomaly Detection Techniques in VANETs: Challenges and Opportunities
651

overfitting and improve the model’s generalisability.
The authors proposed a Guided Learning Approach
for Multi-class Classification (G-LAMC) for address-
ing class imbalance issues. The author pointed that
the Random Forest algorithm obtained better results
than any of the models used in the study.
Chen-Khong Tham et al. (Tham et al., 2023)
performs a research towards the application of fed-
erated learning techniques, FedAvg-SGD, FedAvg-
Adam and FedProx toward anomaly detection in
vehicular networks utilizing the VeReMi Extension
dataset. The research shows efficacy with federated
learning, achieving accuracy of up to 92.18%, while
FedAvg-Adam showed precision at 93.74%, recall at
92.43%, and an F1-score of 93.08%. IID and non-IID
distributions on federated learning models: To under-
stand this, the authors simulate different data distribu-
tions - some randomly and others based on quadrants.
However, the study is somewhat limited in that it only
considers a binary classification scenario and distin-
guishes between normal and anomaly classes.
Devika S et al. (S et al., 2024) has proposed a new
unsupervised anomaly detection framework known as
VADGAN. It works in collaboration with combined
GANs and LSTM to facilitate effective anomaly de-
tection in CAVs. Using the Veremi extension dataset,
it achieved recall at 81.838%, thus establishing one
among many other attack types in this kind of sce-
nario. The study compares different architectures,
such as LSTM, RNN, and GRU, and it has been ob-
served that the outcome of LSTM was excellent in
order to detect complex anomalies. This approach is
very timely as it represents an enhanced development
with the use of GAN-based models for the improve-
ment of CAVs’ security.
5 SURVEY WORK
Figure 2 illustrates the accuracy percentages achieved
by the different models during anomaly detection; in
other words, the comparison of how each of these
models may be used to determine the effectiveness of
anomalies. Figure 3 represents the precision percent-
ages obtained by the models, which denotes the true
positive instances of anomalies that are detected by
them. Precision is crucial, as it is a measure of how
reliable the models are, the ratio of relevant instances
retrieved.
Table 3: Summary of Recent Advances in Misbehaviour
and Malfunction Detection Works
WorkMethod Strengths Weaknesses
[30]Host-based IDS
for rogue node
detection in
VANETs
Higher true pos-
itive rate; effec-
tive anomaly de-
tection
Limited to
specific rogue
node scenarios
[3] Guided Learning
Approach for
Multi-class Clas-
sification
Improved model
generalizability
Potential over-
fitting with
small datasets
[8] Federated learn-
ing techniques
for anomaly
detection
High accuracy
and precision;
insights into data
distributions
Limited to bi-
nary classifica-
tion scenarios
[10]VADGAN:
GANs with
LSTM for
anomaly detec-
tion
Effective in iden-
tifying various
attack types
Limited to
specific ar-
chitectures in
performance
comparison
6 SUMMARY OF REVIEW
FINDINGS
Response to RQ1. Current machine learning-based
methodologies demonstrate considerable effective-
ness in detecting misbehavior within VANETs.
Techniques such as Support Vector Machines
(SVMs), deep learning frameworks (e.g., Long
Short-Term Memory networks), and ensemble
learning approaches have shown promising results.
However, key limitations exist, primarily due to
reliance on inadequate datasets that are far away
from the real-world scenarios, leading to restricted
model adaptability. Furthermore, challenges such as
computational complexity, dependence on predefined
attack databases, and the generalizability of results
across various datasets considerably impede overall
performance.
Response to RQ2. To rectify class imbalances
in data and ensure more accurate detection of vehicu-
lar misbehavior, several strategic interventions can be
implemented:
• Resampling Techniques: Utilizing SMOTE
(Synthetic Minority Over-sampling Technique),
DSSTE and ADASYN (Adaptive Synthetic Sam-
pling) for oversampling minority classes, while
employing random and cluster-based under-
sampling.
• Advanced Algorithms: Implementing One-vs-
All Binary Tree classifiers (OVA-BT) and utiliz-
ing ensemble learning techniques can enhance de-
tection performance across imbalanced datasets.
INCOFT 2025 - International Conference on Futuristic Technology
652

• Cost-Sensitive Learning: Modifying algorithms
to include penalties for misclassifications in mi-
nority classes as well as weighted loss functions
that emphasize minority class errors can help bal-
ance detection capabilities.
Response to RQ3. The failure of physical sensors
in vehicles significantly contributes to the generation
of false data in the VANETs. Malfunctions due
to wear, environmental factors, or electrical issues
lead to erroneous readings, thus compromising the
integrity of transmitted data. These sensors are
responsible for monitoring and transmitting vital
information such as position, speed. When a sensor
fails, the data it produces can become inaccurate or
completely erroneous. For instance, a malfunctioning
GPS sensor might produce incorrect longitude and
latitude coordinates, leading to position malfunctions.
Similarly, speed malfunctions can occur. Overall,
the failure of physical sensors in vehicles introduces
significant vulnerabilities in VANETs, as the integrity
of the data these networks rely on is compromised.
So, it is very important to detect these vulnerabilities
in the network.
Response to RQ4. Position falsification hap-
pens to be a primary focus for researchers, in
detection of misbehaviour in VANETS, due to
its potential adverse effects on safety and system
trust. Accurate positioning is obviously crucial for
navigation and collision avoidance, when an attacker
manipulates positional data, the integrity of these
safety features are compromised. The implications
of effectively detecting position falsification extend
globally, influencing enhancements in vehicular
safety, integration with intelligent/smart city infras-
tructures, and compliance with SAE regulations.
Improved detection methods foster public confidence
in vehicular communications and increase the usage
of autonomous vehicles.
Response to RQ5. Key features or data points
that contribute most significantly to accurate anomaly
detection in VANETs include:
1. Position and Movement Data:GPS coordi-
nates,Vehicle speed, Acceleration ,Direction of
travel ,Difference between sender and receiver po-
sitions/speed.
2. Temporal Features:Timestamp of messages,
Frequency of message transmission, Time inter-
vals between consecutive messages.
3. Network-related Features:Signal strength,
Packet delivery ratio, Network traffic patterns,
Communication range.
Response to RQ6. The utilization of collabora-
tive learning approaches, especially federated learn-
ing, offers substantial benefits for enhancing anomaly
detection across multiple vehicles within VANETs.
By enabling decentralized training, federated learn-
ing allows vehicles to share knowledge while keep-
ing sensitive data localized, thus preserving privacy.
This method enhances anomaly detection by leverag-
ing the diversity of data collected across various vehi-
cles. The scalability of federated learning means that
as more vehicles participate, the model’s adaptabil-
ity to various driving conditions improves. However,
challenges such as data heterogeneity and communi-
cation overhead must be managed to realize its full
potential in detecting anomalies.
7 CONCLUSION
This paper gives a detailed analysis of anomaly de-
tection in VANETs; that is, the techniques used to de-
tect anomalies in VANETs. Thus, their importance
in ensuring secure and reliable communication within
ITS can be emphasized. Different machine learn-
ing, deep learning, and hybrid methods analyzed their
strengths and weaknesses in identifying misbehav-
ior and anomalies in VANETs. Including benchmark
datasets, such as KDD99, NSL-KDD, and VeReMi,
showed considerable improvement over the develop-
ment of accurate detection models, yet the aforemen-
tioned drawbacks remain.
Emerging trends are also seen in the applica-
tion of federated learning and privacy-preserving
frameworks, which lead to potential improvement in
anomaly detection capabilities and align with data pri-
vacy concerns. Class imbalances can be addressed
by advanced resampling techniques, while federated
learning is part of collaborative learning approaches
that further strengthen detection frameworks.
Future directions should include increasing real-
time usability, scalable systems in a wide variety of
vehicular scenarios, and enriching detection mecha-
nisms for sophisticated attack types. By embracing
these new possibilities, VANETs can achieve robust
and secure measures for safer and more efficient ve-
hicular networks in increasingly complicated environ-
ments.
REFERENCES
Agrawal, K., Alladi, T., Agrawal, A., Chamola, V., and
Benslimane, A. (2022). Novelads: A novel anomaly
A Comprehensive Survey on Anomaly Detection Techniques in VANETs: Challenges and Opportunities
653

detection system for intra-vehicular networks. IEEE
Transactions on Intelligent Transportation Systems,
23(11):22596–22606.
Ajjaj, S., el Houssaini, S., Mustapha, H., and Houssaini, M.-
A. (2022). A new multivariate approach for real time
detection of routing security attacks in vanets. Infor-
mation, 13:282.
Alladi, T., Gera, B., Agrawal, A., Chamola, V., and Yu, F. R.
(2021). Deepadv: A deep neural network framework
for anomaly detection in vanets. IEEE Transactions
on Vehicular Technology, 70(11):12013–12023.
Alsarhan, A., Alauthman, M., Alshdaifat, E., Al-Ghuwairi,
A.-R., and Al-Dubai, A. (2021). Machine learning-
driven optimization for svm-based intrusion detection
system in vehicular ad hoc networks. Journal of Am-
bient Intelligence and Humanized Computing, 14.
Anjali, T., Goyal, R., and G.N, B. (2024). Prevention of at-
tacks in vehicular adhoc networks. In 2024 IEEE In-
ternational Students’ Conference on Electrical, Elec-
tronics and Computer Science (SCEECS), pages 1–8.
Aoudni, Y., Shabaz, D. M., Agrawal, A., Yasmin, G.,
Alomari, E. S., Al-Khafaji, H. M. R., Dansana, D.,
and Maaliw III, R. (2024). Vanet network traf-
fic anomaly detection using gru-based deep learning
model. IEEE Transactions on Consumer Electronics,
70:4548–4555.
Baharlouei, H., Makanju, A., and Zincir-Heywood, N.
(2024). Advent: Attack/anomaly detection in vanets.
Bangui, H., Ge, M., and Buhnova, B. (2021). A hybrid data-
driven model for intrusion detection in vanet. Proce-
dia Computer Science, 184:516–523. The 12th Inter-
national Conference on Ambient Systems, Networks
and Technologies (ANT) / The 4th International Con-
ference on Emerging Data and Industry 4.0 (EDI40) /
Affiliated Workshops.
Bayan, S., Mohammad, U., and Al Mohammad, A. (2024).
Position falsification attack detection in inter-vehicle
networks using deep learning. pages 621–626.
Baza, M., Nabil, M., Mahmoud, M. M. E. A., Bewermeier,
N., Fidan, K., Alasmary, W., and Abdallah, M. (2022).
Detecting sybil attacks using proofs of work and loca-
tion in vanets. IEEE Transactions on Dependable and
Secure Computing, 19(1):39–53.
Behravan, M., Zhang, N., Jaekel, A., and Kneppers, M.
(2022). Intrusion detection systems based on stack-
ing ensemble learning in vanet. In 2022 5th Inter-
national Conference on Communications, Signal Pro-
cessing, and their Applications (ICCSPA), pages 1–7.
Ercan, S., Ayaida, M., and Messai, N. (2022). Misbehav-
ior detection for position falsification attacks in vanets
using machine learning. IEEE Access, 10:1893–1904.
Garg, S., Kaur, K., Kaddoum, G., Gagnon, F., Kumar, N.,
and Han, Z. (2019). Sec-iov: A multi-stage anomaly
detection scheme for internet of vehicles. pages 37–
42.
Goncalves, F., Macedo, J., and Santos, A. (2021). An intel-
ligent hierarchical security framework for vanets. In-
formation, 12:455.
Guerrero-Ib
´
a
˜
nez, J. A., Flores-Cort
´
es, C., and Zeadally, S.
(2013). Vehicular Ad-hoc Networks (VANETs): Ar-
chitecture, Protocols and Applications, pages 49–70.
Springer London, London.
Gyawali, S., Qian, Y., and Hu, R. Q. (2020). Machine learn-
ing and reputation based misbehavior detection in ve-
hicular communication networks. IEEE Transactions
on Vehicular Technology, 69(8):8871–8885.
He, A. (2024). Understanding on-board units (obu) in vehi-
cle telematics. Medium.
Kaur, G., Khurana, M., and Kaur, A. (2022). Gray hole
attack detection and prevention system in vehicular
adhoc network (vanet). In 2022 3rd International
Conference on Computing, Analytics and Networks
(ICAN), pages 1–6.
Kuchaki Rafsanjani, M., Fatemidokht, H., Balas, V. E., and
Batth, R. S. (2021). An anomaly detection system
based on clustering and fuzzy set theory in vanets.
In Balas, V. E., Jain, L. C., Balas, M. M., and Shah-
bazova, S. N., editors, Soft Computing Applications,
pages 399–407, Cham. Springer International Pub-
lishing.
Kumar, N. and Chilamkurti, N. (2014). Collaborative trust
aware intelligent intrusion detection in vanets. Com-
puters & Electrical Engineering, 40.
Liu, B., Liu, X., Gao, S., Yu, B., and Zuo, P. (2023). Fed-
erated learning for vanet based on homomorphic en-
cryption. In 2023 Cross Strait Radio Science and
Wireless Technology Conference (CSRSWTC), pages
1–3. IEEE.
Liu, X. (2022). Misbehavior detection based on deep learn-
ing for vanets. In 2022 International Conference on
Networks, Communications and Information Technol-
ogy (CNCIT), pages 122–128.
Lyamin, N., Kleyko, D., Delooz, Q., and Vinel, A.
(2018). Ai-based malicious network traffic detection
in vanets. IEEE Network, 32(6):15–21.
Nie, L., Wu, Y., Wang, H., and li, y. (2019). Anomaly de-
tection based on spatio-temporal and sparse features
of network traffic in vanets. IEEE Access, 7:177954–
177964.
Nissar, N., Naja, N., and Jamali, A. (2024). Securing
vanets: Multi-objective intrusion detection with varia-
tional autoencoders. IEEE Transactions on Consumer
Electronics, 70(1):3867–3874.
Poongodi, M., Hamdi, M., Sharma, A., Ma, M., and Singh,
P. K. (2019). Ddos detection mechanism using trust-
based evaluation system in vanet. IEEE Access,
7:183532–183544.
S, D., Shrivastava, R. R., Narang, P., Alladi, T., and Yu,
F. R. (2024). Vadgan: An unsupervised gan frame-
work for enhanced anomaly detection in connected
and autonomous vehicles. IEEE Transactions on Ve-
hicular Technology, 73(9):12458–12467.
Shahid, M. A. and Jaekel, A. (2023). Hybrid approach to
detect position forgery attacks in connected vehicles.
In 2023 14th International Conference on Network of
the Future (NoF), pages 47–51.
Shakir, A., Islam, M., Mandeep, J., Islam, M., Abdul-
lah, N., Taher, Y., Abdullahi, O., and Soliman, M.
(2024). Systematic review of data exchange for road
side unit in a vehicular ad hoc network: coherent
INCOFT 2025 - International Conference on Futuristic Technology
654

taxonomy, prominent features, datasets, metrics, per-
formance measures, motivation, opportunities, chal-
lenges and methodological aspects. Discover Applied
Sciences, 6.
Shams, E. and Ulusoy, A. (2020). Performance analy-
sis and comparison of anomaly-based intrusion detec-
tion in vehicular ad hoc networks. Radioengineering,
29:664–671.
Shu, J., Zhou, L., Zhang, W., Du, X., and Guizani, M.
(2021). Collaborative intrusion detection for vanets:
A deep learning-based distributed sdn approach. IEEE
Transactions on Intelligent Transportation Systems,
22(7):4519–4530.
Singh, P. K., Gupta, S., Vashistha, R., Nandi, S. K., and
Nandi, S. (2019). Machine learning based approach to
detect position falsification attack in vanets. In Nandi,
S., Jinwala, D., Singh, V., Laxmi, V., Gaur, M. S., and
Faruki, P., editors, Security and Privacy, pages 166–
178, Singapore. Springer Singapore.
Slama, O., Alaya, B., and Zidi, S. (2022). Towards mis-
behavior intelligent detection using guided machine
learning in vehicular ad-hoc networks (vanet). In-
teligencia Artificial, 25:138–154.
Slama, O., Tarhouni, M., Zidi, S., and Alaya, B. (2023).
One versus all binary tree method to classify misbe-
haviors in imbalanced veremi dataset. IEEE Access,
11:135944–135958.
So, S., Sharma, P., and Petit, J. (2018). Integrating plau-
sibility checks and machine learning for misbehavior
detection in vanet. In 2018 17th IEEE International
Conference on Machine Learning and Applications
(ICMLA), pages 564–571.
Tan, H., Gui, Z., and Chung, I. (2018). A secure and effi-
cient certificateless authentication scheme with unsu-
pervised anomaly detection in vanets. IEEE Access,
6:74260–74276.
Tham, C.-K., Yang, L., Khanna, A., and Gera, B. (2023).
Federated learning for anomaly detection in vehicular
networks. In 2023 IEEE 97th Vehicular Technology
Conference (VTC2023-Spring), pages 1–6.
Yang, S., Liu, Z., Li, J., Wang, S., and Yang, F. (2016).
Anomaly detection for internet of vehicles: A trust
management scheme with affinity propagation. Mo-
bile Information Systems, 2016:1–10.
Yang, Z., Ying, J., Shen, J., Feng, Y., Chen, Q. A., Mao,
Z. M., and Liu, H. X. (2023). Anomaly detection
against gps spoofing attacks on connected and au-
tonomous vehicles using learning from demonstra-
tion. IEEE Transactions on Intelligent Transportation
Systems, 24(9):9462–9475.
Zaidi, K., Milojevic, M. B., Rakocevic, V., Nallanathan, A.,
and Rajarajan, M. (2016). Host-based intrusion detec-
tion for vanets: A statistical approach to rogue node
detection. IEEE Transactions on Vehicular Technol-
ogy, 65(8):6703–6714.
A Comprehensive Survey on Anomaly Detection Techniques in VANETs: Challenges and Opportunities
655
