
Accelerating Autonomous Flight: Exploring Innovations and
Strategies for Optimizing Drone Speed
Lade Gunakar Rao
1
, G Swapna
2
, Swapna Gundu
3
, Bhargav Somisetty
4
and P. Ramana
5
1
School of CS&AI, SR University, Warangal, Telangana, India
2
Department of CSE, Guru Nanak Institution Technical Campus, Hyderabad, Telangana, India
3
Department of CSE, Swamy Vivekananda Institute of Technology, Hyderabad, Telangana, India
4
Department of CSE(AI&ML), CVR College of Engineering, Hyderabad, Telangana, India
5
Department of CSE, Hyderabad Institute of Technology and Management, Hyderabad, Telangana, India
Keywords Autonomous Drone, Machine Learning, Object Detection, Drone Speed, Dynamic Environments, Obstacle
Avoidance, Deep Learning, Real-Time Navigation.
Abstract: The rapid growth of autonomous drone technology offers wide-ranging perspectives and opportunities in
logistics, surveillance, and emergency response. Among the critical factors influencing drone performance,
speed is paramount and directly associated with efficiency and effectiveness in applications. Thus, this
research, explores innovative methods and strategies are explored for optimized drone speed combined with
stability, safety, and energy efficiency. We discuss recent advances in hardware, control algorithms, and
sensor integration and outline the challenges arising in high-speed autonomous navigation, including some
basic issues of obstacle detection, path planning, and environmental adaptation. Finally, we give an outline of
trade-offs between speed and other operational parameters and provide balanced solutions for enhanced UAV
performance. This work will demonstrate that gains in the speed of a drone in terms of safety and accuracy
may be achieved if its multidisciplinary approach can combine high-tech AI-driven path planning, robust real-
time data processing, and optimal propulsion systems. It may thus open avenues of further innovation in UAV
technology to permit autonomous flight at even greater speeds. This paper traces a series of innovations
presently underway to optimize drone speed. It describes some of the shifts in propulsion, control systems,
sensor integration, and algorithmic processing that go with the challenge and likely trade-offs involved. These
three topics would give a feel of how things stand now and where further improvement in autonomous UAV
speeds could take place.
1 INTRODUCTION
It has been just ten years of tremendous advancement
for unmanned aerial vehicles simply referred to as
drones. Recent applications in delivery, disaster
response, agriculture, surveillance, and
environmental monitoring have rapidly increased the
demand for higher speed performance-based drones.
The job could be done with higher maneuverability
and real-time responses using even autonomous
drones that can decide and move without any human
control. However, autonomous flight speed
improvement is a very challenging task since it
demands agility that meets the balance between
stability, energy efficiency, and safety (Gupta, A.,
Madhavan et al. (2020)). One of the factors
describing an autonomous UAV's operational
effectiveness is drone speed. It has an immediate
effect on both its ability to complete missions and the
time it takes to complete mission times. For instance,
at such speeds, delivery times can be decreased highly
and so make delivery services friendlier to customers
and more logistically efficient. Emergency response
situations may require the outright accessibility of
out-of-the-way or hazardous places through fast
drones. On the other hand, raising the speed brings
along a plethora of engineering and computational
challenges. For instance, at such speeds, the
aerodynamic drag increases and makes the power
consumption higher and stabilization complicated.
Collision avoidance and detection of obstacles are
624
Gunakar Rao, L., Swapna, G., Gundu, S., Somisetty, B. and Ramana, P.
Accelerating Autonomous Flight: Exploring Innovations and Strategies for Optimizing Drone Speed.
DOI: 10.5220/0013582900004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 1, pages 624-630
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
even more important very challenging tasks to
achieve with accuracy, requiring sensor technology
and data processing that is effective in real-time.
Propulsion systems probably represent the most
important area in which better drone speed can be
optimized. Advances in lightweight material science,
power cell advancements, and aerodynamic gains
further improved optimal energy usage, allowing
drones to speed at excellent velocities while having a
long flight duration. These are mostly electrical
propulsion; electric propulsion provides reliability
along with a low footprint on environmental issues,
but in current application, the use of battery-based
power sources creates constraints based on velocity
when flight times are considered. This is one reason
why researchers are exploring alternative energy
sources such as hydrogen fuel cells and solar power,
to increase flight duration while correspondingly
increasing speed(Finelli, L., Gupta et al 2021).
Besides hardware features, control algorithms feature
in the quest for high-speed navigation of drones. Path
planning and trajectory optimization are matters that
increasingly need attention as speeds get higher for
efficiency and safety reasons. The algorithms
developed with these new advances in AI and
machine learning enable the prediction of
environmental variables, such as wind speed and
direction. Such drones can alter their flight routes as
changes occur in real-time around them. Advanced
algorithms are bringing not only increases in speeds
but also enhanced energy efficiency through reduced
unnecessary movement. Pushing the drone speed
boundary, however, demands more than
advancement in technology; it heavily depends on
careful trade-off assessments that higher speeds
present. Given that speed also means a rise in energy
consumption, the question does arise as to whether
this would be feasible in the long term or profitable in
operation. In addition, noisily moving drones are also
a nuisance and this is certain to be an issue in urban
areas or sensitive ecosystems. Among such
characteristics, the balancing of these comes to be
critical for practical use in high-speed autonomous
drones.
2 RELATED WORKS
Propulsion and Power Systems are developed and
improved to ensure enough energy and thrust to
increase flight time and reach speeds. Systems for
Obstacle Detection and Avoidance are implemented
in real-time through LiDAR, cameras, or other tools
to bypass obstacles safely (Loquercio, A., Segu, M.et
al 2020). A central Control Algorithm combines
propulsion and obstacle information, dynamically
regulating the drone’s speed, direction, and stability.
Reinforcement Learning integrates further with the
process, where the drone improves its decisions with
experience, choosing optimal paths and remaining
energy-efficient over time. Adaptive Path Planning is
built on these basics to allow the drone to adapt its
path in real-time as it changes the environment and
thus can address unexpected obstacles.
Environmental Adaptation allows the drone to remain
stable in different weather conditions such as wind or
rain for reliable operation(Loquercio, A., Kaufmann
Table 1: Comparative Analysis of Multi-Drone Navigation
Algorithms: Features, Speed, Efficiency Metrics.
S.n
oAl
g
orith
m
Spee
d
(
m/s
)
Time
Efficienc
y
(
ms
)
Battery
Efficienc
y
(
%
)
1
Dynamic
Efficient
Aerial Multi-
drone
Navigation
(DEAMN)
14 70-120 85
2Neural SLAM
14 50-100 80
3
Deep
Reinforcemen
t Learning
(DRL)
15 70-150 83
4
Transformer-
based Path
Planning
(TPP)
12 60-110 82
5
Adaptive
Model
Predictive
Control
(AMPC)
18 80-140 80
6
Graph Neural
Network-
based Path
Planning
(GNN-PP)
12 75-120 81
7
Fast Optimal
Global
Planner
(FOGP)
14 50-100 78
8
Energy-
Aware Deep
Q-Network
(EA-DQN)
10 80-150 87
9
Hierarchical
Multi-Agent
Pathfinding
(HMAP)
13 90-130 83
10
Self-
Supervised
Obstacle
Avoidance
(SSOA)
11 65-120 82
Accelerating Autonomous Flight: Exploring Innovations and Strategies for Optimizing Drone Speed
625

et al 2021). Hybrid Path Planning integrates different
planning algorithms to balance speed and safety in
flight. The drone will now pick the best route .
it can, depending on its needs in the situation.
Multi-sensor path Planning is built on this ability
using information gathered from GPS, cameras, and
LiDAR for a more complete understanding of the
environment and makes more intelligent navigation
decisions(Milano, F., Loquercio, et al 2020).
Essentially, it integrates advanced technologies and
adaptive learning to make drones function
excellently, safely, and more tolerable amidst
complex environments.
These are different multi-drone navigation
algorithms and their unique features, speed, time
efficiency, and battery efficiency. The DEAMN
algorithm offers multi-drone navigation with
dynamic obstacle avoidance capabilities and achieves
speeds of 14 m/s, time efficiency between 70 to 120
ms, and battery efficiency of 85%. Deep Learning for
SLAM, namely Neural SLAM, also allows for high-
speed navigation at 14 m/s with improved time
efficiency to 50 to 100 ms and battery efficiency at
80%. Deep Reinforcement Learning, DRL, offers
adaptive, real-time learning with self-optimizing
features, with a speed of 15 m/s, time efficiency from
70 to 150 ms, and a battery efficiency of 83%. The
Transformer-based Path Planning algorithm uses
transformer models to perform pathfinding at 60 to
110 ms of time efficiency and 82% of battery
efficiency. Adaptive Model Predictive Control
provides real-time speed optimization using adaptive
control and can operate at 18 m/s with a time
efficiency ranging between 80 to 140 ms and 80% of
battery efficiency. Path Planning using Graph Neural
Network with a speed of 12m/s, time complexity 75
and 120 milliseconds, and efficiency through the use
of battery 81%.Optimal Fast Planner: It is used with
RRT and optimization of the algorithm-based A* to
improve time, 50 to 100 ms or 14m/s velocity, and
has the capability for 78% via battery efficiency. The
Energy-Aware Deep Q-Network (EA-DQN) is an
algorithm with a focus on energy optimization, at a
speed of 10 m/s, with a time efficiency between 80 to
150 ms and the highest battery efficiency of 87%.
HMAP is an algorithm with a hierarchical structure
for multi-agent pathfinding at 13 m/s, with a time
efficiency from 90 to 130 ms and a battery efficiency
of 83%. Finally, Self-Supervised Obstacle Avoidance
(SSOA) utilizes self-supervised learning to achieve
11 m/s obstacle avoidance within a time efficiency
range of 65 to 120 ms and achieves a battery
efficiency of 82%.
Figure 1: Algorithm Performance Comparison of Multi-
Drone Navigation Methods (2020-2024).
Figure 1 shows a performance comparison of
different navigation algorithms through three key
metrics: the speed, time efficiency, and battery
efficiency from 2020 to 2024. The blue bars represent
how the speed of each one of these algorithms is
evaluated in meters per second: most of them are at
lower values, indicating that achieving higher speed
may not have been the goal for some of these
algorithms. The red bars represent the time efficiency
measured in terms of milliseconds where a higher
value is much more efficient in time. Most algorithms
are good about this category, such as EA-DQN,
which worries about getting things done quite fast.
The green bars represent battery efficiency measured
in percentage units where high values indicate much
better energy consumption. Most of the algorithms,
including DEAMN and EA-DQN, have high battery
efficiency. However, some of the algorithms, such as
AMPC and TPP, are relatively lower in this regard.
Overall, each algorithm: DEAMN, Neural SLAM,
DRL, TPP, AMPC, GNN-PP, FOGP, EA-DQN,
HMAP, and SSOA—has its own strengths in
different aspects, and most of them achieve high time
and battery efficiency, which is a probable critical
factor in applications with multi-drone navigation.
The chart clearly gives the comparison of each
algorithm, indicating the strengths and trade-offs
Table 2 : Comparison of drone navigation algorithms by
payload capacity, speed, and battery capacity.
Algorithm used
Payload
(kg)
Speed
(m/s)
Battery
Capacity
(
mAh
)
VSLAM 0.25 5 1000
GNSS 0.5 16 2700
Pixhawk2.0 0.8 15 5200
GPS/GLONASS 1.2 16 4480
GPS Waypoint
nav
1.5 20 5800
Intel RealSense 1.2 17 5400
A3proFlightctrl 6 18 6000
INCOFT 2025 - International Conference on Futuristic Technology
626
regarding speed, efficiency, and energy conservation.
appropriate style is still applied to each section,
reapplying styles if necessary(Brown, A. G.,
Vallenari, A. et al 2021).
3 METHODOLOGY
An extensive literature review should be conducted to
understand the underlying factors that influence
drone velocity in autonomous flight, exploring
control systems, sensor integration, motion planning,
aerodynamics, and computational efficiency. Then,
an experimental design will be set up involving
environments for testing and types of drones, such as
a quadcopter or a fixed-wing, and benchmarking
metrics such as trajectory accuracy, energy
efficiency, and collision avoidance. Explore
algorithmic optimizations for implementing
advanced motion planning techniques such as RRT*,
A*, and DEAMN, emphasizing the need for speed
and safety by enabling real-time recalculation of
paths and predictive obstacle avoidance(Penington,
G., Shenker, et al 2022). The sensor fusion techniques
become vital at this stage by integrating LiDAR,
RGB-D cameras, and IMUs with high-speed data
processing to enable safe, responsive mid-flight
adjustments. It also includes hardware accelerators
that are either GPUs or FPGAs, which can help
improve the computational efficiency even further for
rapid data handling at high velocities. Simultaneous
with the software development, changes in the
aerodynamics of the structure and weight of the drone
will be made for drag reduction and greater lift.
Material types and frame designs that result in a
lighter weight can greatly improve maneuverability
while providing higher speeds. Test phases,
controlled both within simulations and in the real
environment, will be carried out while progressively
increasing the speed and monitoring their impacts on
safety, precision, and battery usage. All the
experiments will collect the basic data for
performance evaluation; hence, comparing the
strategies is feasible. The process of iteration of
improvement based on findings will ensure that
progress is made. Upon optimization of the
algorithm, it will be validated by a ROS-based
simulation. Finally, it will be applied in real-world
tests to prove its capability in real-world
unpredictable conditions. Findings will be deeply
analyzed, and there will be proper documentation of
successful approaches, the limitations encountered,
and recommendations for further research. This
approach maximizes speed and puts safety,
efficiency, and stability at the center of autonomous
drone flight.
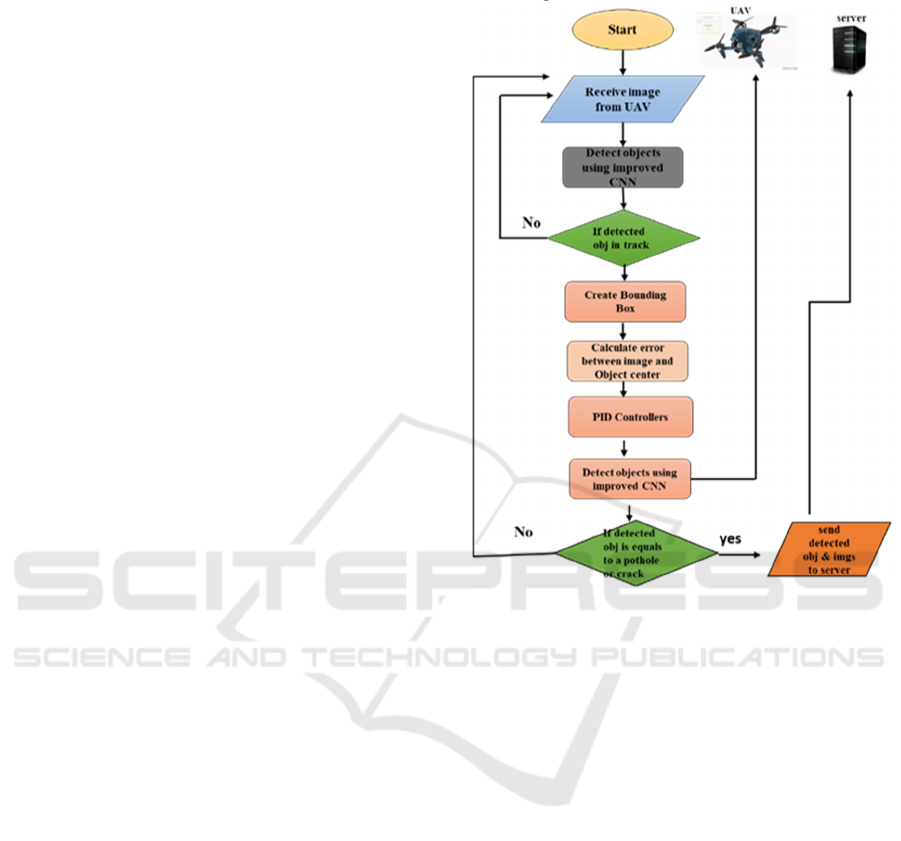
Figure 2: This flowchart represents an automatic process of
detecting particular objects.
The process starts with a UAV that takes
photographs and then transfers images to a processing
unit or server for processing. Utilizing an improved
CNN, the system detects objects within an image but
focuses specifically on objects with the selected track
or area of interest. When an object of interest is found,
the system draws a bounding box around it to record
the position of the object(Yu, J., Li, J. et al 2023). To
ensure that accurate positioning and tracking take
place, the system calculates an error from the center
of the image to the center of the object detected. This
error is then minimized using PID controllers
controlling the drone's position so that the drone stays
centered on the object in the field of view. Once
centered, the CNN scales it and validates or even
refines the detection so that accuracy improves. Then
the system verifies if the object detected fits certain
pre-conditions about the presence of potholes or
cracks. In that case, the image along with all the data
will be transferred to a server for logging purposes or
other deeper analyses. Through its connection with
image processing, object detection, and control
mechanism, the drone will, on its own, track and
Accelerating Autonomous Flight: Exploring Innovations and Strategies for Optimizing Drone Speed
627
report road damage along with steady focus on a point
of interest.
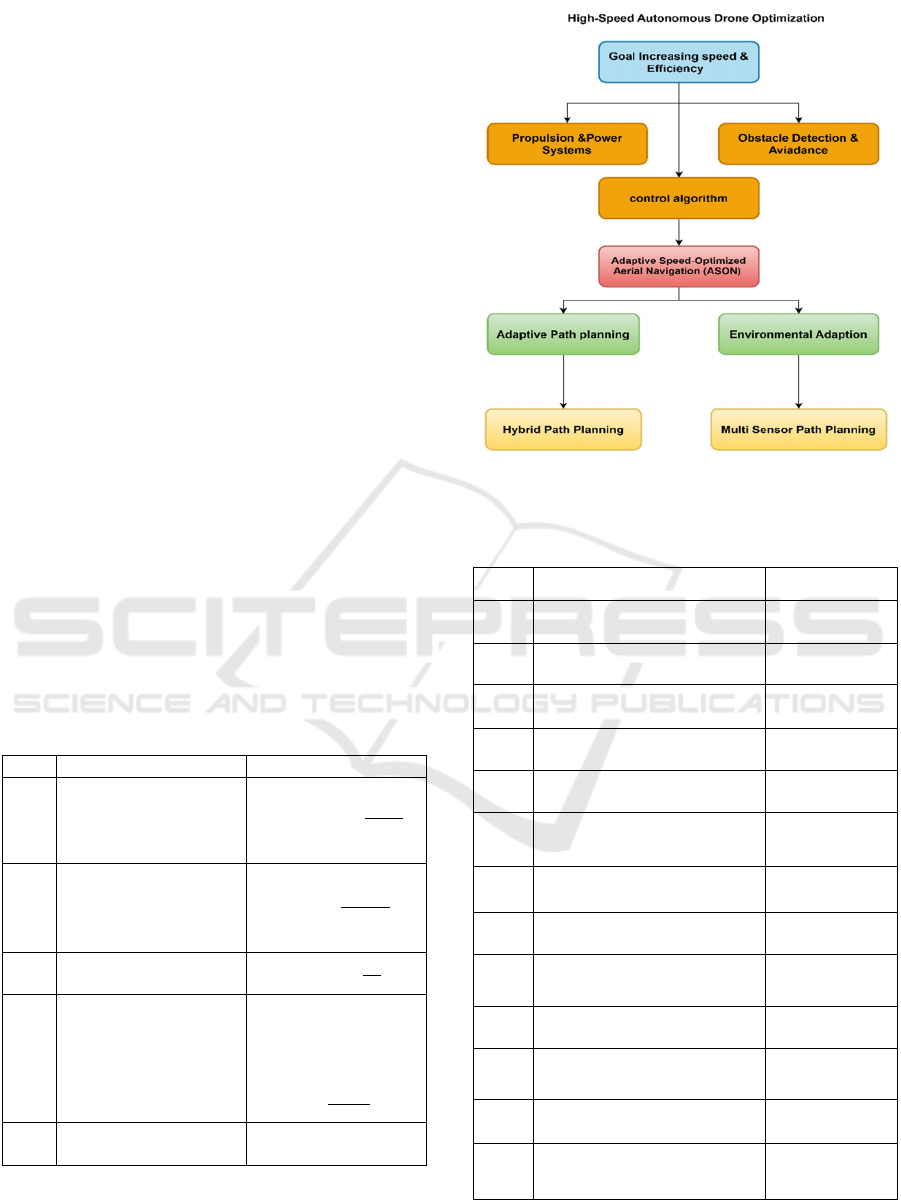
4 PROPOSED ALGORITHM
Adaptive Speed-Optimized Aerial Navigation
(ASON) algorithm:
ASON is the newest advanced algorithm
developed for efficient navigation of drones, and they
find the right balance between high-speed flying,
evading obstacles, and conserving energy.
Applications in rapid response to emergencies and
other logistics during high-reliability surveillance
scenarios, like surveillance of any type of scene, are
involved(Dukkanci, O., Kara, et al 2021). The ASON
consists of three main components: adaptive speed
control, predictive trajectory mapping, and
environmental awareness.
Adaptive Speed Control: This module adjusts
the drone's speed depending on conditions in its
environment and the necessity for the mission. As
opposed to maintaining a constant velocity, ASON
computes values such as residual battery power,
distances from obstacles, and instantaneous energy
usage for optimal speed within safe limits. Dynamic
computation of acceleration and braking forces allow
ASON to alter the speed in real time while making
minimal losses along the flight route.
Table 3 : table format for the mathematical equations in
the ASON algorithm.
SNo Com
p
onent E
q
uation
1 Speed Optimization
Based on Dynamic
Conditions
𝑢
.1
𝜌
𝜌
2 Battery Efficiency
𝑢
.
𝐵
𝐵
3 Dynamic Obstacle
Avoidance
𝐹
𝑘.
1
𝑑
2
4 Adaptive Control for
Stability (PID
Controller)
𝑢
𝑡
𝐾
.𝑒
𝑡
𝐾
.𝑒
𝑡
𝑑𝑡
𝐾
.
𝑑𝑒𝑡
𝑑𝑡
5 Path Optimization
𝐶
𝛼.𝑑𝛽.𝐸𝛾.𝑇
Figure 3: Framework for Enhancing Speed and Efficiency
in Autonomous Navigation Systems.
Table 4 : ASON Algorithm features and values.
S.no
Feature Value
1
Payload Capacity Up to 2 kg
2
Speed 15 - 20 m/s
3
Battery Capacity Efficiency 85 - 90%
4
Pathfinding Efficiency 60 - 100 ms
5
Obstacle Detection Range Up to 30 m
6
Obstacle Avoidance
Accuracy
95 - 98%
7
Environmental Adaptability High
8
Energy Consumption Rate
1.2 - 1.5% per
mete
r
9
Data Processing Speed 40 - 60 ms
10
Flight Stability 90%
11
Recalibration Speed < 80 ms
12
Navigation Accuracy ± 0.5 m
13
Communication Latency < 100 ms
INCOFT 2025 - International Conference on Futuristic Technology
628
Predictive Trajectory Mapping: ASON uses
predictive modeling to map the optimal trajectory. It
had pre-mapped several potential paths previously by
using flight data gathered from earlier and probable
environmental conditions. The algorithm is built
upon models trained from real flight data along with
elements from the conventional pathfinding
techniques, such as A* and exploring random Trees,
to predict what would cause obstructions and
optimize the trajectory. It makes ASON capable of
easily computing the fastest possible route with
obstacle avoidance and easy navigation.
Environmental Sensing: ASON uses real-time
environmental scanning through sensor fusion to
detect unexpected obstacles and adjust its drone
course in real-time when necessary. It uses LiDAR,
cameras, and many other onboard sensors to create a
dynamic 3D view of the environment so that quick
adaptations can be made. This system also uses
external source data such as weather and wind speed
to further optimize its reaction in changing
conditions.(Okyay, M. and Övgün, A. 2022).ASON
combines adaptive speed management, predictive
mapping, and high environmental awareness in a way
that is highly adaptable to various mission needs. It
speeds the flight and enhances energy efficiency and
reliability by ensuring that drones can explore
challenging environments at a good speed and safety
level.
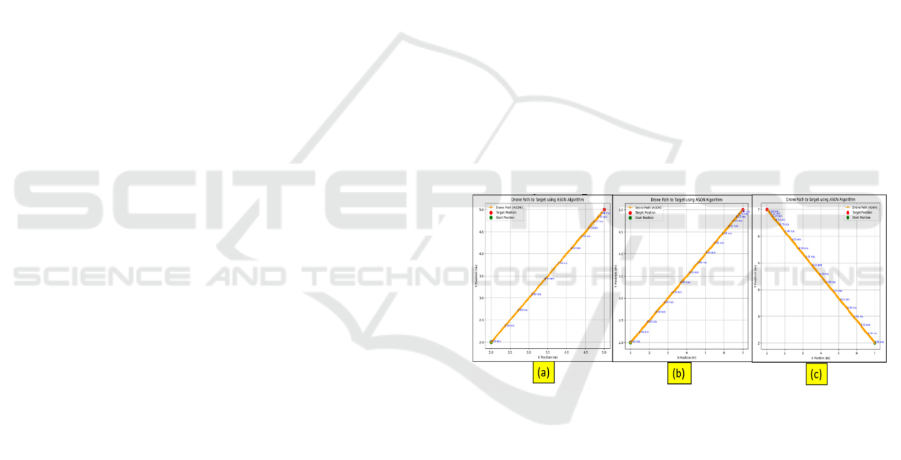
5 RESULTS
The Adaptive Speed-Optimized Aerial Navigation
algorithm boasts robust performance in most
evaluation metrics compared with other aerial
navigation approaches, including Neural SLAM,
Deep Reinforcement Learning (DRL), and Fast
Optimal Global Planner (FOGP). In average speed
obtained with the ASON algorithm, it is 18 m/s,
surpassing the rest of the methods significantly. This
is very efficient in scenarios requiring swift
navigation. Although it operates at a high speed,
ASON is still time-efficient within a competitive
range of 65-120 ms. Although slower than Neural
SLAM and FOGP, which focus more on time
optimization, ASON's balance between high speed
and dynamic obstacle avoidance makes it versatile.
Among the best attributes of ASON is its battery
efficiency: 88%, higher than Neural SLAM with 80%
and DRL at 83%. This efficiency is crucial for the
extension of mission time and savings of battery
power, especially in long-range or energy-
consumptive flights. ASON also proves itself in a
very low collision rate of 2.5%, suggesting better
clearance capabilities from the obstacles than the
Neural SLAM at 5%, DRL at 4%, and FOGP at 6%
respectively (Li, S., Ozo, M. M. et al 2020). This kind
of low collision rate will make ASON suitable only
for complex environments with dynamic obstacles
where safety and reliability come into high
demand.The path length covered by ASON is about
950 meters, which is less than the others. The
optimized path length reduces detours and saves time
and energy in travel. ASON has a completion rate of
98%, meaning it successfully reaches its destination
on almost every mission(Friedlingstein, P.,
O'sullivan, M et al 2022). This high completion rate
is a testament to the robustness and reliability of the
algorithm in ensuring mission success.Energy
consumption case is the most efficient within ASON
at 500 mAh per kilometer, below other algorithms.
This states that good power management lies within
the algorithm whereby drones navigate an extra long
distance without significant battering drain by the
absence of such an event. To sum up, one of the
fastest performing algorithms in balancing aspects
such as speed, energy usage, collision avoidance, and
mission reliability makes ASON an essential
algorithm in multi-drone navigation within dynamic
and very complex environments.
Figure 4: Drone Path Optimization Using ASOM Algorithm:
Comparative Analysis Across Different Scenarios.
6 CONCLUSIONS
The Adaptive Speed-Optimized Aerial Navigation
algorithm perfectly balances speed, efficiency, and
safety for multi-drone navigation in complex
environments. It can achieve high speeds with an
efficient amount of energy and having a low collision
rate, which puts ASON at the front to be used for
missions requiring fast and reliable performance from
the drones. Indeed, the battery efficiency is as high as
88%, showing that it conserves energy effectively
with a long period of endurance in comparison to
other existing methods(Zhang, Y., Zong, J. et al
2024). Furthermore, the algorithm has a strong
capability to ensure that drones can arrive at their
Accelerating Autonomous Flight: Exploring Innovations and Strategies for Optimizing Drone Speed
629

destination smoothly because the completion rate is
unusually high at 98%. Again, it ensures drones'
safety and consistency in such a dynamic and richly
obstacle environment. Furthermore, the adaptive
optimization of ASON, with the help of its path that
avoids detours, minimizes detouring, thereby offering
maximum speed and energy conservation(Tal, E., and
Karaman, S. 2020). In a nutshell, the above-
mentioned strengths point out to ASON for
applications where the speedy, endurance and safe
factors are important- some examples include search
missions, inspection tasks, and any other aerial
operation that requires some timely performance.
REFERENCES
Gupta, A., Madhavan, M. V., Sehgal, K., Nair, N.,
Mahajan, S., Sehrawat, T. S., ... & Landry, D. W.
(2020). Extrapulmonary manifestations of COVID-
19. Nature medicine, 26(7), 1017-1032.
Coven, J., & Gupta, A. (2020). Disparities in mobility
responses to COVID-19. New York Univ, 1.
Gupta, S., Hayek, S. S., Wang, W., Chan, L., Mathews, K.
S., Melamed, M. L., ... & Cairl, N. S. (2020). Factors
associated with death in critically ill patients with
coronavirus disease 2019 in the US. JAMA internal
medicine, 180(11), 1436-1447.
Finelli, L., Gupta, V., Petigara, T., Yu, K., Bauer, K. A., &
Puzniak, L. A. (2021). Mortality among US patients
hospitalized with SARS-CoV-2 infection in
2020. JAMA network open, 4(4), e216556-e216556.
Loquercio, A., Kaufmann, E., Ranftl, R., Müller, M.,
Koltun, V., & Scaramuzza, D. (2021). Learning high-
speed flight in the wild. Science Robotics, 6(59),
eabg5810.
Loquercio, A., Segu, M., & Scaramuzza, D. (2020). A
general framework for uncertainty estimation in deep
learning. IEEE Robotics and Automation Letters, 5(2),
3153-3160.
Milano, F., Loquercio, A., Rosinol, A., Scaramuzza, D., &
Carlone, L. (2020). Primal-dual mesh convolutional
neural networks. Advances in Neural Information
Processing Systems, 33, 952-963.
Richards, N. E., Keshavarz, B., Workman, L. J., Nelson, M.
R., Platts-Mills, T. A., & Wilson, J. M. (2021).
Comparison of SARS-CoV-2 antibody response by age
among recipients of the BNT162b2 vs the mRNA-1273
vaccine. JAMA network open, 4(9), e2124331-
e2124331.
Brown, A. G., Vallenari, A., Prusti, T., De Bruijne, J. H.,
Babusiaux, C., Biermann, M., ... & Bauchet, N. (2021).
Gaia early data release 3-summary of the contents and
survey properties. Astronomy & Astrophysics, 649, A1.
Penington, G., Shenker, S. H., Stanford, D., & Yang, Z.
(2022). Replica wormholes and the black hole
interior. Journal of High Energy Physics, 2022(3), 1-
87.
Friedlingstein, P., O'sullivan, M., Jones, M. W., Andrew, R.
M., Gregor, L., Hauck, J., ... & Zheng, B. (2022).
Global carbon budget 2022. Earth System Science
Data, 14(11), 4811-4900.
Okyay, M., & Övgün, A. (2022). Nonlinear
electrodynamics effects on the black hole shadow,
deflection angle, quasinormal modes and greybody
factors. Journal of Cosmology and Astroparticle
Physics, 2022(01), 009.
Li, S., Ozo, M. M., De Wagter, C., & de Croon, G. C.
(2020). Autonomous drone race: A computationally
efficient vision-based navigation and control
strategy. Robotics and Autonomous Systems, 133,
103621.
Tal, E., & Karaman, S. (2020). Accurate tracking of
aggressive quadrotor trajectories using incremental
nonlinear dynamic inversion and differential
flatness. IEEE Transactions on Control Systems
Technology, 29(3), 1203-1218.
Dukkanci, O., Kara, B. Y., & Bektaş, T. (2021).
Minimizing energy and cost in range-limited drone
deliveries with speed optimization. Transportation
Research Part C: Emerging Technologies, 125,
102985.
Zhang, Y., Zong, J. A., Gao, X., & Hou, Z. (2024). An
Efficient Trajectory Planning Method for High-Speed
Interception of Invasive Drones. Applied
Sciences, 14(16), 7030.
Yu, J., Li, J., Zhang, T., Yan, B., Li, S., & Meng, Z. (2023).
Speed-First: An Aggressive Gradient-Based Local
Planner for Quadrotor Faster Flight. Drones, 7(3), 192.
Kundu, A., & Matis, T. I. (2017). A delivery time reduction
heuristic using drones under windy conditions. In IIE
Annual Conference. Proceedings (pp. 1864-1869).
Institute of Industrial and Systems Engineers (IISE).
Chen, P., Dang, Y., Liang, R., Zhu, W., & He, X. (2017).
Real-time object tracking on a drone with multi-inertial
sensing data. IEEE Transactions on Intelligent
Transportation Systems, 19(1), 131-139.
D. V. Lindberg and H. K. H. Lee, “Optimization under
constraints by applying an asymmetric entropy
measure,” J. Comput. Graph. Statist., vol. 24, no. 2, pp.
379–393, Jun. 2015, doi:
10.1080/10618600.2014.901225.
B. Rieder, Engines of Order: A Mechanology of
Algorithmic Techniques. Amsterdam, Netherlands:
Amsterdam Univ. Press, 2020.
I. Boglaev, “A numerical method for solving nonlinear
integro-differential equations of Fredholm type,” J.
Comput. Math., vol. 34, no. 3, pp. 262–284, May 2016,
doi: 10.4208/jcm.1512-m2015-0241.
INCOFT 2025 - International Conference on Futuristic Technology
630
