
Parallel Tensor Network Contraction for Efficient Quantum Circuit
Simulation on Multicore CPUs and GPUs
Alfred M. Pastor
1 a
, Maribel Castillo
2 b
and Jose M. Badia
2 c
1
Dpt. of Computer Science, Universitat de Val
`
encia, Avinguda de la Universitat, s/n, 46100 Burjassot, Spain
2
Dpt. of Computer Science and Engineering, Universitat Jaume I, Av. Vicent Sos Baynat, s/n, 12071 Castell
´
on de la Plana,
Spain
Keywords:
Quantum Circuit Simulation, Tensor Network Contraction, Parallel Computing, Multicore CPUs, GPUs.
Abstract:
Quantum computing has the potential to transform fields such as cryptography, optimisation and materials
science. However, the limited scalability and high error rates of current and near-term quantum hardware
require efficient classical simulation of quantum circuits for validation and benchmarking. One of the most
effective approaches to this problem is to represent quantum circuits as tensor networks, where simulation is
equivalent to contracting the network. Given the computational cost of tensor network contraction, exploiting
parallelism on modern high performance computing architectures is key to accelerating these simulations. In
this work, we evaluate the performance of first-level parallelism in contracting individual tensor pairs during
tensor network contraction on both multi-core CPUs and many-core GPUs. We compare the efficiency of three
Julia packages, two optimised for CPU-based execution and the other for GPU acceleration. Our experiments,
conducted with two parallel contraction strategies on highly entangled quantum circuits such as Quantum
Fourier Transform (QFT) and Random Quantum Circuits (RQC), demonstrate the benefits of exploiting this
level of parallelism on large circuits, in particular the superior performance gains achieved on GPUs.
1 INTRODUCTION
Quantum computing has the potential to solve
problems that are infeasible for classical comput-
ers (Nielsen and Chuang, 2010). However, cur-
rent quantum hardware remains limited by low qubit
counts and high error rates, leading to considerable in-
terest in simulating quantum circuits on classical sys-
tems. Such simulations provide critical insight into
algorithm performance and offer a practical means of
testing and benchmarking quantum algorithms.
This article explores advanced methods for sim-
ulating quantum circuits, with an emphasis on ten-
sor networks and parallelism to improve scalability
and efficiency. Tensor networks represent quantum
states and operations as interconnected tensors, al-
lowing significant compression of the state space and
reducing the computational overhead of simulations.
By exploiting the structural properties of quantum cir-
cuits, tensor networks can simulate larger and more
a
https://orcid.org/0000-0002-7740-6354
b
https://orcid.org/0000-0002-2826-3086
c
https://orcid.org/0000-0002-5927-0449
complex systems (Markov and Shi, 2008).
Recent advances in tensor network simulations
include optimisation techniques for GPUs, such
as transforming Einstein summation operations into
GEMM operations and using mixed precision to bal-
ance speed and accuracy. Improved algorithms for
determining optimal tensor contraction paths have
further reduced computational times, demonstrating
significant gains in performance and accuracy (Gray
and Kourtis, 2021). Parallelism complements these
advances by distributing computational workloads
across multiple processors, enabling the simulation
of larger circuits than would be feasible on a single
processor. By integrating tensor networks and paral-
lelism, classical simulations can approach the practi-
cal limits of quantum circuit emulation.
Parallel simulation algorithms can be classified by
the levels of parallelism they exploit and the types of
parallel architectures they target. At a fine-grained
level, parallelism is applied to pairwise tensor con-
tractions, often reformulated as matrix multiplications
for compatibility with highly optimised linear alge-
bra libraries. A higher level of parallelism involves
the simultaneous contraction of groups of tensors, de-
120
Pastor, A. M., Castillo, M., Badia and J. M.
Parallel Tensor Network Contraction for Efficient Quantum Circuit Simulation on Multicore CPUs and GPUs.
DOI: 10.5220/0013551400004525
In Proceedings of the 1st International Conference on Quantum Software (IQSOFT 2025), pages 120-127
ISBN: 978-989-758-761-0
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

termined by techniques such as community detection
in tensor network graphs or hypergraph partitioning.
Slicing, which splits indices to create subcircuits, fur-
ther increases parallelism by dividing the original ten-
sor network into smaller, independently contractible
components (Huang et al., 2021). Finally, multi-
ple output state amplitudes can be computed in par-
allel by contracting the same tensor network multi-
ple times while keeping both the input and output
indices closed. This is particularly useful for tasks
such as random circuit sampling, which was used by
Google in 2019 in an attempt to demonstrate quantum
supremacy (Arute et al., 2019).
The choice of parallel architecture also plays a
key role in simulation performance. Distributed mem-
ory systems are ideal for large-scale simulations due
to their large memory capacity, enabling the simula-
tion of high-qubit circuits where tensor sizes grow ex-
ponentially. Multicore processors, commonly found
in modern servers, facilitate shared memory commu-
nication and support multiple levels of parallelism.
GPUs excel at tensor contraction tasks due to their
massive data parallelism capabilities, although their
limited memory can limit the size of tensors they can
handle. Hybrid approaches that combine these archi-
tectures, such as using GPUs for matrix multiplica-
tion within a distributed memory framework, can mit-
igate individual limitations and improve overall per-
formance.
In this study, we evaluate the first level of paral-
lelism using multicore processors and GPUs within
two different algorithms: one that applies this par-
allelism throughout the contraction process, and an-
other that combines both levels of parallelism in a
multi-stage algorithm, applying the first level in the fi-
nal stage. We have evaluated and compared the paral-
lel performance of three Julia packages, two that per-
form pairwise tensor contractions on multicore CPUs,
and one that performs them on the GPU. We used two
types of complex and highly entangled circuits as test
beds: Quantum Fourier Transform (QFT) and Ran-
dom Quantum Circuits (RQC). This work is carried
out in the QXTools environment, a Julia-based frame-
work for simulating quantum circuits via tensor net-
works (Brennan et al., 2022).
The main contributions of this work can be sum-
marised as follows:
• We evaluate the impact of first-level parallelism
in tensor network contraction for quantum circuit
simulation on high-performance architectures.
• We compare the efficiency of two CPU-based and
one GPU-based Julia packages and analyse their
performance on different quantum circuit types.
• We evaluate the influence of circuit struc-
ture and contraction strategy on parallel perfor-
mance, distinguishing between full-network and
community-based tensor contraction.
• Our experimental results provide a quantitative
analysis of the scalability of multicore CPUs and
GPUs to contracts tensor networks in parallel.
The paper is structured as follows: Section 2 re-
views related work, while Section 3 provides back-
ground on tensor networks. Section 4 outlines tensor
contraction strategies, and Section 5 details the eval-
uation methodology. Section 6 presents experimental
results, followed by conclusions in Section 7.
2 RELATED WORK
A variety of libraries, frameworks and simulators
have been developed for tensor network contraction
to address the high computational and memory cost
of this process (Quantiki, 2023). Many of these tools
implement different levels of parallelism to improve
the efficiency of contraction and to enable the simula-
tion of larger quantum circuits.
One of the most notable frameworks for tensor
network-based quantum circuit simulation on CPU
is qFlex (Villalonga et al., 2019). This framework,
as many simulators, uses slicing techniques to parti-
tion tensor networks across nodes in a cluster, while
using a multithreaded BLAS library to perform pair-
wise tensor contractions on each node’s CPU. TAL-SH
was designed for GPU-based simulations and later
evolved into the qExaTN simulator (Lyakh et al.,
2022), which integrates the first and second levels of
parallelism.
Other approaches optimise tensor network con-
traction using task-based execution models. The
Jet simulator combines slicing techniques and asyn-
chronous tasks to minimise redundant computation
and improve execution time on shared memory mul-
tiprocessors and GPUs (Vincent et al., 2022). The
AC-QDP simulator
1
has been applied to RQC circuits,
employing tensor network contraction optimisations
that have also been incorporated into the widely used
CoTenGra library
2
. Some of the latest implemen-
tations exploit GPU-based parallelism by optimising
tensor index reordering, adjusting data precision, and
using the cuTensor library to improve contraction ef-
ficiency (Pan et al., 2024).
NVIDIA’s cuQuantum SDK provides tools
for exact and approximate tensor contraction on
GPUs (Bayraktar et al., 2023). The framework
1
https://github.com/alibaba/acqdp
2
https://github.com/jcmgray/cotengra
Parallel Tensor Network Contraction for Efficient Quantum Circuit Simulation on Multicore CPUs and GPUs
121

provides the cuTensorNet library, which computes
contraction plans on the CPU and implements pair-
wise tensor contractions using single or multi-GPU
configurations. These methods combine the first and
second levels of parallelism using both intra-node
and inter-node optimisations.
3 BACKGROUND
Tensors naturally generalise the concepts of vectors
and matrices to higher dimensions. A rank-r tensor
is an element of the space C
d
1
×···×d
r
, where d
1
, . . . , d
r
denote its dimensions. For example, a vector with d
complex components belongs to the space C
d
and is
classified as a rank-1 tensor (v ∈ C
d
), while a matrix
with dimensions n × m resides in the space C
n×m
and
is classified as a rank-2 tensor (M ∈ C
n×m
).
Quantum circuits can naturally be represented as
tensor networks, where the gates are represented as
tensors and the indices correspond to the qubits con-
necting these gates. In this representation, all indices
have a dimension of 2, reflecting the two possible base
states of a qubit, |0⟩ and |1⟩, which form the compu-
tational basis. The basic operation used with tensor
matrices is contraction, which corresponds to a tensor
product of two tensors followed by a trace over the
indices they share.
The use of tensor networks for the simulation of
quantum circuits was introduced in (Markov and Shi,
2008). The approach involves contracting tensors in
pairs until only a single tensor remains. However,
finding the optimal tensor contraction order, which
significantly affects the time and space cost, is NP-
hard, leading to the development of various heuris-
tics (Gray and Kourtis, 2021).
Partitioning the tensor network into smaller sub-
networks is a widely used strategy to reduce the com-
plexity of the contraction process and enable paral-
lel execution. A particularly promising approach to
achieve this is community detection, a method from
graph theory that identifies highly connected regions
within a network. In our previous work, we proposed
a multi-stage parallel algorithm that uses community
detection to partition tensor networks (Pastor et al.,
2025). We employed the Girvan-Newman (GN) al-
gorithm that uses edge betweenness centrality to iter-
atively remove high-centrality edges, isolating com-
munities within the network (Girvan and Newman,
2002). In tensor network contraction, it minimizes
inter-community connections, reducing tensor ranks
in later stages.
4 STRATEGIES FOR TENSOR
CONTRACTION
Due to its high computational and memory require-
ments, several strategies have been developed to opti-
mise the execution of tensor contractions on modern
hardware, especially on multicore CPUs and GPUs.
The three main approaches to tensor contraction are:
(1) direct execution as matrix multiplication, know as
GEMM (GEneral Matrix-Matrix), (2) explicit mem-
ory reordering to enable GEMM execution, known
as TTGT (Transpose-Transpose-GEMM-Transpose),
and (3) memory access optimisations that avoid ex-
plicit transpositions. This section discusses these
strategies, highlighting their advantages, limitations,
and implementations in widely used libraries.
The first approach to tensor contraction is direct
matrix multiplication using optimized GEMM rou-
tines like multithreaded BLAS (CPUs) or cuBLAS
(GPUs) (NVIDIA, 2023). This method maximizes ef-
ficiency but is only feasible when tensor indices can
be grouped without transposition, which is uncom-
mon in general tensor network contractions for quan-
tum circuits.
When a tensor contraction does not map directly
to a matrix multiplication, a common alternative is
to explicitly reorder the tensor indices in memory to
transform the contraction into a GEMM operation.
This strategy is known as the TTGT approach, and is
widely used in GPU-based tensor contraction libraries
such as cuTensor (NVIDIA, 2024), which performs
optimised transpositions using CUDA kernels before
performing the GEMM operation.
Other advanced techniques have been developed
to optimise tensor contractions while avoiding data
reordering in memory. These include the GEMM-like
Tensor-Tensor Contraction (GETT) strategy or the
Block-Scatter-Matrix Tensor Contraction (BSMTC).
The GETT approach improves memory access effi-
ciency by using cache-aware partitioning and hierar-
chical tensor contraction loops, reducing the need for
explicit reordering (Springer and Bientinesi, 2018).
BSMTC uses block-scatter vector layouts to dynam-
ically compute memory addresses, allowing data to
be accessed in its natural order without transposition.
It was introduced in the TBLIS library (Matthews,
2018).
The first level of parallelism can be applied in the
three strategies just described. Optimised versions
of BLAS such as Intel MKL or OpenBLAS can be
used in multi-core CPUs and cuBLAS in GPUs to
perform parallel matrix multiplications. Data trans-
positions can be performed in parallel using spe-
cialised libraries. Finally, optimised multithreading
IQSOFT 2025 - 1st International Conference on Quantum Software
122

can also be applied in the BSMTC method by paral-
lelizing multiple loops around a microkernel, optimis-
ing memory access and minimising synchronisation
overhead (Matthews, 2018).
5 TENSOR NETWORK
CONTRACTION
5.1 QXTools Tensor Network
Contraction Framework
Our work involves the development and evaluation
of parallel algorithms within the QXTools simulation
framework (Brennan et al., 2021), a core component
of the QuantEx project. Implemented in Julia, QX-
Tools uses several external packages to manage ten-
sor operations, optimise contraction sequences, deter-
mine efficient slicing strategies, and run large-scale
simulations on GPUs or high performance computing
clusters
3
. The framework supports all three levels of
parallelism described earlier.
For the first level of parallelism, the framework
relies on QXContext, which relies on CUDA.jl to per-
form contractions on GPU, while CPU-based con-
tractions are performed using the OMEinsum and
ITensors packages
4
.
With respect to the second level of parallelism,
QXTools enables slicing to divide the tensor network
into multiple smaller subtensor networks, facilitating
the contraction of larger networks. In addition, QX-
Tools supports the use of MPI processes to perform
parallel contractions of the subtensor networks gener-
ated by slicing, both in shared memory multiproces-
sor servers and in distributed memory clusters.
Regarding the third level of parallelism, QXTools
allows the distribution of the output state amplitude
sampling across multiple MPI processes running in
parallel.
We used QXTools to implement and evaluate a
novel multi-stage parallel algorithm for tensor net-
work contraction and compared it with other paral-
lelization strategies (Pastor et al., 2025). This al-
gorithm integrates the first two levels of parallelism.
Specifically, it uses the Girvan-Newman community
detection algorithm to partition the tensor network.
Then, multiple threads are used to contract the tensor
network associated with each detected community in
parallel. Finally, the first level of parallelism is used
to contract each pair of tensors in the resulting net-
work on a GPU.
3
https://juliaqx.github.io/QXTools.jl
4
https://github.com/under-Peter/OMEinsum.jl
5.2 Parallel Tensor Network
Contraction Algorithms
In this paper we compare the performance of three Ju-
lia packages that exploit the first level of parallelism
described in the introduction to contract tensor net-
works. Two of them run on multi-core CPUs, while
the third runs on GPUs. The tools used are OMEinsum
(OME): a Julia package used in QXTools to perform
pairwise tensor contractions within the network on a
CPU; BliContractor (BLI): a Julia package that
implements a wrapper for the TBLIS library to con-
tract tensor pairs on a CPU
5
; and CUDA.jl: a Julia
package used by QXTools to perform pairwise tensor
contractions on NVIDIA GPUs.
Our experiments analyse the performance of
these three packages using two different algorithms:
single-stage to carry out the contractions of all the
tensor pairs during the execution of a tensor network
contraction plan, and multi-stage to contract the
tensor pairs in the final stage of the parallel multi-
stage method introduced in (Pastor et al., 2025).
The first level of parallelism behaves differently
in the two algorithms. The first contracts hundreds or
thousands of tensors with varying ranks, from small
single-qubit tensors to high-rank ones, involving sin-
gle or multiple indices. The second contracts fewer
but high-rank tensors, often sharing many qubits.
When both input and output are closed, the final con-
traction reduces to a scalar.
OMEinsum.jl performs tensor contractions using
Einstein summation notation, providing an efficient
and flexible approach to tensor operations. If a tensor
contraction can be reformulated as a matrix multipli-
cation, OMEinsum.jl internally calls BLAS routines
(such as BLAS.gemm!), allowing multi-threaded exe-
cution and optimised performance.
The Julia package BliContractor.jl is based in
the TBLIS library, which optimizes tensor contrac-
tions using the BSMTC technique and parallelized its
execution on multi-core arquitectures.
To test the performance of BliContractor we
modified the method executed by QXTools to per-
form pairwise tensor contractions. Specifically, we
replaced the call to EinCode from OMEInsum with a
call to contract from BliContractor.
Finally, QXTools uses QXContexts for tensor
contraction on distributed machines, including GPUs.
QXContexts relies on CUDA.jl, which provides a
high-level interface to NVIDIA’s CUDA ecosystem,
enabling seamless execution of GPU kernels in Julia.
5
https://github.com/xrq-phys/BliContractor.jl
Parallel Tensor Network Contraction for Efficient Quantum Circuit Simulation on Multicore CPUs and GPUs
123
6 EXPERIMENTAL RESULTS
AND DISCUSSION
6.1 Experimental Environment
The experiments were conducted on a high perfor-
mance computing server equipped with two AMD
EPYC 7282 processors, each with 16 cores and run-
ning at a base frequency of 2.8GHz. The system is
configured with a total of 256 GiB of DDR4 RAM
and benefits from 64 MiB of L3 cache. For GPU ac-
celeration, the server is equipped with an NVIDIA
RTX A6000 graphics card based on the Ampere ar-
chitecture (Compute Capability 8.6). This GPU has
10,752 CUDA cores and 336 Tensor cores and is man-
ufactured using 8nm process technology. It also in-
cludes 48 GiB of GDDR6 memory.
6.2 Pairwise Tensor Contraction
This section presents a comparative analysis of two
Julia packages, OMEinsum and BliContractor, for
sequential and parallel contraction of a pair of tensors
using a multi-core CPU. The experiments were per-
formed by contracting two tensors of different ranks
(10 and 22) that share a subset of their indices.
First, we evaluate the sequential performance of
both packages when the two tensors share only the
contracted index. We then analyse the impact on per-
formance of varying this index.
0
5
10
15
20
25
1 2 3 4 5 6 7 8 9 10
Package
OME
BLI
Time (s)
Contracted index
Figure 1: Comparison of the sequential contraction time of
OMEinsum and BliContractor to contract one index. Ten-
sors with ranks 10 and 22.
Figure 1 shows that OMEinsum consistently out-
performs BliContractor in sequential execution,
achieving approximately four times the speedup
across all indices tested.
Next, we examine the parallel performance of
both packages when contracting tensors over a single
index.
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
2 4 8 12 16 20 24 28 32
Package
OME−i1
OME−i5
BLI−i1
BLI−i5
BLIvsOME−i1
BLIvsOME−i5
Speedup
Number of threads
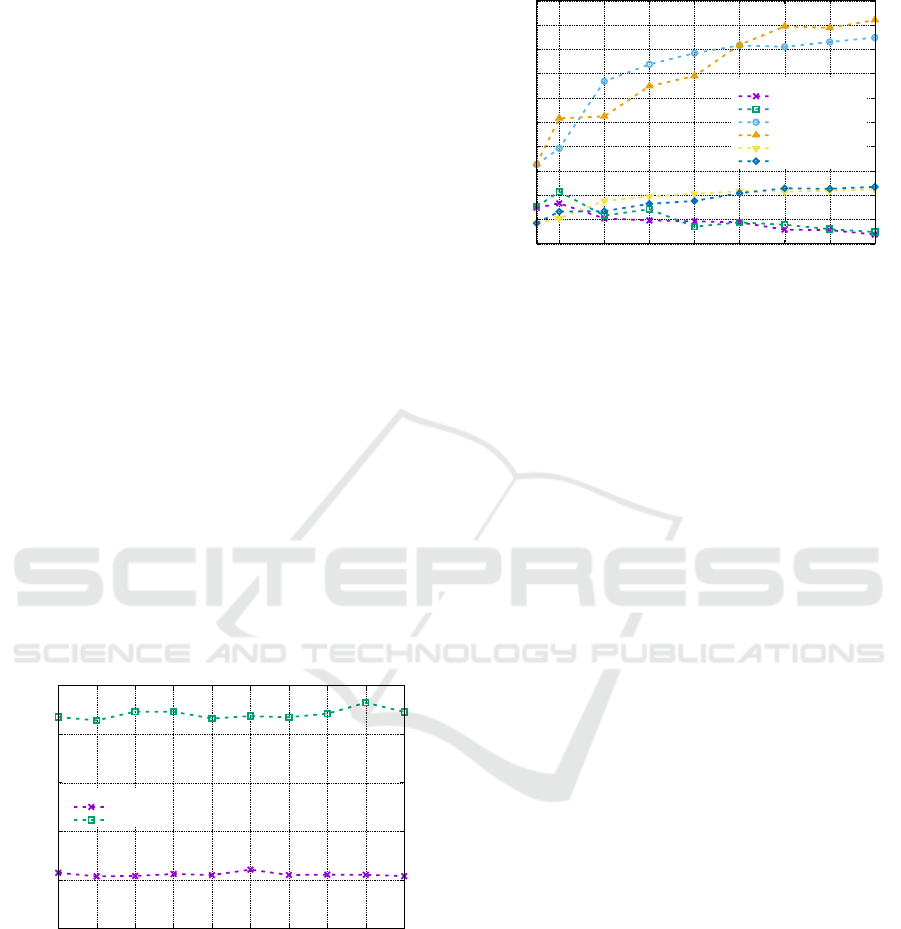
Figure 2: Comparison of the speedups of OMEinsum and
BliContractor to contract indices 1 and 5. BLIvsOME
lines show the speedup of BLIContractor with respect
to the fastest sequential version (OMEinsum). Tensors with
ranks 10 and 22.
Figure 2 highlights a fundamental difference be-
tween the two packages: BliContractor allows
parallel contraction over a single index (1 and 5),
whereas OMEinsum does not. The conclusion from
these experiments is that OMEinsum was not de-
signed to take advantage of the parallelism offered
by modern multi-core processors, but rather to ef-
ficiently perform sequential pairwise tensor contrac-
tions. OMEinsum only uses multithreaded implemen-
tations of matrix multiplication in very few cases.
Conversely, BliContractor uses the C-based TBLIS
package, which is designed not only to minimise data
movement in memory, but also to efficiently perform
parallel pairwise tensor contractions.
Despite BliContractor’s ability to exploit par-
allelism, its sequential performance remains signifi-
cantly lower than OMEinsum. As a result, when we
calculate the speedups of BliContractor with re-
spect to the fastest sequential algorithm, OMEinsum,
we only get small speedups when using more than 20
threads.
Finally, we compare the parallel performance of
both packages when the tensors share several indices
and are contracted over all of them. The speedup evo-
lution is analysed when contracting between 1 and the
10 indices of the lower-rank tensor. To eliminate po-
tential bias due to index selection, the indices were
chosen randomly and the reported results are the av-
erage of five different index sets.
The figures 3a and 3b show different behaviour
of both packages. OMEinsum only achieves speedup
when the 10 indices of the lower-rank tensor are
contracted, and even then the acceleration is mod-
est (below 4). Furthermore, using more than eight
IQSOFT 2025 - 1st International Conference on Quantum Software
124

0
2
4
6
8
10
1 2 3 4 5 6 7 8 9 10
#Threads
2
4
8
16
32
Speedup
Number of indexes
(a) OMEinsum
0
1
2
3
4
5
6
7
8
9
10
1 2 3 4 5 6 7 8 9 10
#Threads
2
4
8
16
32
Speedup
Number of indexes
(b) BliContractor
Figure 3: Comparison of the speedups of OMEinsum and BliContractor to contract between 1 and 10 indices. Tensors with
ranks 10 and 22.
threads reduces the observed speedup. In contrast,
BliContractor shows a more regular speedup pat-
tern. For two threads, it achieves a near-optimal
speedup for any number of contracted indices. For
4 and 8 threads, the speedup increases progressively
for up to 6 indices and then decreases. Using more
than 8 threads reinforces this trend, with a rapid in-
crease up to 4 contracted indices, followed by an even
steeper decline beyond that point.
Additional experiments confirm that the highest
parallel efficiency in both packages occurs when con-
tracting all indices of two tensors of equal rank,
and this efficiency tends to increase with rank. For
example, contracting all indices of two tensors of
rank 30 gives a speedup of 18.3 using 28 threads
with BliContractor and 6.9 using 20 threads with
OMEinsum. Both speedups are with respect to the se-
quential time using the same package.
The general conclusion from the experiments pre-
sented in this section is that OMEinsum is significantly
more efficient for sequential pairwise tensor contrac-
tions. However, BliContractor takes much better
advantage of the multi-core architecture of modern
processors, which can speed up contractions for both
single and multiple indices.
6.3 Parallel Tensor Network
Contraction
This section evaluates the performance of the three
packages introduced in section 5.2 for exploiting first-
level parallelism in tensor network contraction on
both multicore CPUs and manycore GPUs. To quan-
tify the efficiency of the parallel algorithms, we use
two well-established types of quantum circuits: RQCs
and QFT. In both cases, contraction is performed by
summing over all input and output indices of the cir-
cuit, effectively computing the probability amplitude
of a given quantum state.
We first analyse the scalability of BliContractor
in parallel execution as the contracted circuit size in-
creases. To this end, we evaluate QFT circuits of
different qubit sizes using the single-stage contrac-
tion algorithm, where BliContractor is used to con-
tract all tensor pairs defined by a contraction plan de-
rived from the Girvan-Newman algorithm. Figure 4
illustrates the speedup achieved by the single-stage
method when using 2 to 32 threads for QFT circuits
of various sizes. The speedup is calculated relative to
the sequential execution time obtained with the same
package.
The results in Figure 4 show that the benefits of
parallelism become more pronounced as the circuit
size increases, especially as the number of qubits in-
creases. This trend occurs because the computational
cost and tensor dimensions scale significantly with the
number of qubits, resulting in a higher workload that
allows more efficient thread utilisation in the contrac-
tion process.
For the smallest circuit (QFT25), parallel execu-
tion on multiple CPU threads does not speed up the
contraction; instead, it slightly increases the execu-
tion time compared to the sequential approach. For
the QFT29 circuit, only modest speedups (< 1.5) are
observed, with little improvement as more threads
are added. However, for the QFT33 circuit and be-
yond, speedups become significant, peaking at 15×
for the QFT35 circuit. It is expected that even greater
speedups can be achieved for larger circuits, provided
that sufficient memory is available.
As discussed in the previous section, the efficiency
of parallel execution in these contractions depends
heavily on the tensor ranks and the indices involved.
Higher-ranked tensors and a greater number of con-
Parallel Tensor Network Contraction for Efficient Quantum Circuit Simulation on Multicore CPUs and GPUs
125
tracted indices allow better exploitation of first-level
parallelism in BliContractor. This explains the in-
creasing benefits of parallelism with increasing circuit
size.
0
2
4
6
8
10
12
14
16
2 4 8 16 32
#Qubits
25
29
33
35
Speedup
Number of threads
Figure 4: Speedup evolution of the parallel algorithm us-
ing BliContractor for QFT circuits of different sizes
(#Qubits).
Next, we compare the performance of the three
Julia packages when contracting QFT-type circuits of
different sizes using the single-stage algorithm. To do
this, we compute the speedup achieved by OMEinsum,
BliContractor and CUDA (for GPU-accelerated con-
traction) relative to the sequential execution time of
the fastest method provided by OMEinsum. Figure 5
shows the speedup evolution for the three packages
as the circuit size increases. The results for the CPU-
based packages correspond to the fastest execution us-
ing 32 threads.
Results show that GPU-based contraction with
CUDA consistently outperforms CPU-based methods,
while the two CPU-based packages achieve similar
performance regardless of circuit size. In particu-
lar, for the smallest circuits (25 and 29 qubits), all
three packages yield modest speedups. In fact, par-
allel BliContractor shows longer execution times
than the sequential version of OMEinsum. As the
circuit size increases, all three methods improve,
although CPU-based packages show only marginal
gains, while the GPU-based package exploits its
many-core architecture to achieve significant and
growing speedups, reaching up to 4.75× for the
QFT35 circuit. These results suggest that even greater
improvements can be achieved for larger circuits, pro-
vided sufficient memory is available.
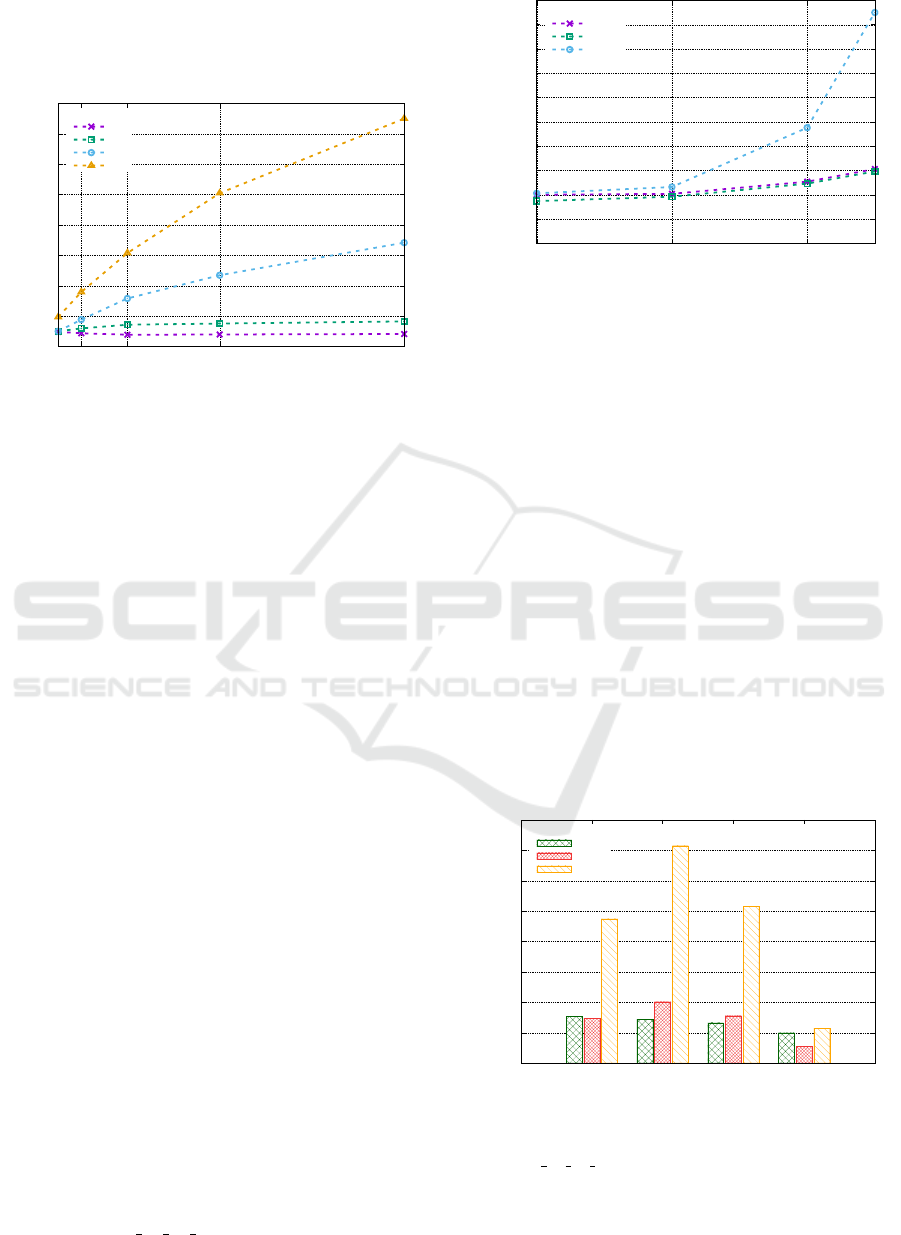
Finally, we compare the performance of the three
packages for two contraction algorithms: single-stage
and multi-stage. Figure 6 presents the speedups
achieved by the three packages relative to the best se-
quential algorithm for two circuit types: a QFT35 cir-
cuit and an RQC 12 12 14 circuit. The latter consists
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
25 29 33 35
Package
OME
BLI
CUDA
Speedup
Number of qubits
Figure 5: Speedup evolution using different packages for
QFT circuits of varying sizes for single-state algorithm.
of a 12 × 12 qubit array with 14 layers. The reported
speedups reflect only the portions of contraction that
leverage first-level parallelism. Specifically, for the
single-stage method, speedups account for total con-
traction time, while for the multi-stage method, they
correspond to speedups achieved in the third stage.
These results confirm that GPU execution con-
sistently delivers superior performance, while the
two CPU-based packages show similar behaviour.
In addition, the performance of all three packages
is comparable for both circuit types in the single-
stage approach. However, the multi-stage algorithm
achieves significantly better performance for QFT cir-
cuits compared to RQC circuits. These results high-
light the impact of circuit structure on parallelism
benefits. In particular, there is a distinction between
contracting all tensor pairs (single-stage) and con-
tracting only a much smaller set of tensors with high
ranks and numerous indices (multi-stage).
0
1
2
3
4
5
6
7
8
QFT-single QFT-multi RQC-single RQC-multi
Package
OME
BLI
CUDA
Speedup
Circuit-Method
Figure 6: Parallel performance of the three Julia packages
for the single- and multi-stage methods. Results for QFT35
and RQC 12 12 14 circuits.
IQSOFT 2025 - 1st International Conference on Quantum Software
126

7 CONCLUSIONS
In this work, we have evaluated the benefits of par-
allelizing pairwise tensor contractions on both multi-
core CPUs and GPUs. Our experimental results, ob-
tained using three Julia packages, show that exploit-
ing this level of parallelism can significantly accel-
erate the tensor network contraction process. In par-
ticular, we observed that the massive data parallelism
provided by GPUs significantly outperforms the per-
formance of multicore CPUs.
For our experiments we used the QXTools pack-
age, which relies on OMEinsum for pairwise tensor
contraction on the CPU. Our results indicate that
OMEinsum gets limited speedups from parallel exe-
cution in most cases. In contrast, BliContractor
achieves a more effective use of first-level paral-
lelism. However, since BliContractor is consid-
erably slower in sequential contraction, its overall
performance only slightly exceeds that of OMEinsum
when using parallel execution.
Finally, we observed that parallel performance is
strongly influenced by the structure of the circuit and
by whether first-level parallelism is applied to the
contraction of all tensor pairs or is restricted to the
contraction of the reduced network formed by the
communities detected in the initial tensor network.
These results highlight the importance of choosing an
appropriate contraction strategy based on the circuit
properties to maximise computational efficiency.
ACKNOWLEDGEMENTS
This research was funded by the project
PID2023-146569NB-C22 supported by MI-
CIU/AEI/10.13039/501100011033 and ERDF/UE.
REFERENCES
Arute, F., Arya, K., Babbush, R., et al. (2019). Quan-
tum supremacy using a programmable superconduct-
ing processor. Nature, 574(7779):505–510.
Bayraktar, H., Charara, A., Clark, D., Cohen, S., Costa,
T., Fang, Y.-L. L., Gao, Y., Guan, J., Gunnels, J.,
Haidar, A., et al. (2023). cuQuantum SDK: A high-
performance library for accelerating quantum science.
In 2023 IEEE International Conference on Quantum
Computing and Engineering (QCE), volume 1, pages
1050–1061. IEEE.
Brennan, J., Allalen, M., Brayford, D., Hanley, K.,
Iapichino, L., O’Riordan, L. J., Doyle, M., and Moran,
N. (2021). Tensor network circuit simulation at exas-
cale. In 2021 IEEE/ACM Second International Work-
shop on Quantum Computing Software (QCS), pages
20–26. IEEE.
Brennan, J., O’Riordan, L., Hanley, K., Doyle, M., Allalen,
M., Brayford, D., Iapichino, L., and Moran, N. (2022).
Qxtools: A julia framework for distributed quantum
circuit simulation. Journal of Open Source Software,
7(70):3711.
Girvan, M. and Newman, M. E. (2002). Community struc-
ture in social and biological networks. Proceedings of
the national academy of sciences, 99(12):7821–7826.
Gray, J. and Kourtis, S. (2021). Hyper-optimized tensor
network contraction. Quantum, 5:410.
Huang, C., Zhang, F., Newman, M., Ni, X., Ding, D., Cai,
J., Gao, X., Wang, T., Wu, F., Zhang, G., et al. (2021).
Efficient parallelization of tensor network contraction
for simulating quantum computation. Nature Compu-
tational Science, 1(9):578–587.
Lyakh, D. I., Nguyen, T., Claudino, D., Dumitrescu, E.,
and McCaskey, A. J. (2022). ExaTN: Scalable GPU-
accelerated high-performance processing of general
tensor networks at exascale. Frontiers in Applied
Mathematics and Statistics, 8:838601.
Markov, I. L. and Shi, Y. (2008). Simulating quantum com-
putation by contracting tensor networks. SIAM Jour-
nal on Computing, 38(3):963–981.
Matthews, D. A. (2018). High-performance tensor contrac-
tion without transposition. SIAM Journal on Scientific
Computing, 40(1):C1–C24.
Nielsen, M. A. and Chuang, I. L. (2010). Quantum compu-
tation and quantum information. Cambridge univer-
sity press, New York.
NVIDIA (2023). cuBLAS Library User Guide.
https://docs.nvidia.com/cuda/cublas/index.html.
NVIDIA (2024). cuTENSOR: A High-Performance CUDA
Library For Tensor Primitives. https://docs.nvidia.
com/cuda/cutensor.
Pan, F., Gu, H., Kuang, L., Liu, B., and Zhang, P. (2024).
Efficient quantum circuit simulation by tensor net-
work methods on modern gpus. ACM Transactions
on Quantum Computing, 5(4):1–26.
Pastor, A. M., Badia, J. M., and Castillo, M. (2025). A com-
munity detection-based parallel algorithm for quan-
tum circuit simulation using tensor networks. The
Journal of Supercomputing, 81. Art. no. 450.
Quantiki (2023). List of QC simulators. https://quantiki.
org/wiki/list-qc-simulators.
Springer, P. and Bientinesi, P. (2018). Design of a high-
performance GEMM-like tensor–tensor multiplica-
tion. ACM Transactions on Mathematical Software
(TOMS), 44(3):1–29.
Villalonga, B., Boixo, S., Nelson, B., Henze, C., Rieffel, E.,
Biswas, R., and Mandr
`
a, S. (2019). A flexible high-
performance simulator for verifying and benchmark-
ing quantum circuits implemented on real hardware.
npj Quantum Information, 5(1):86.
Vincent, T., O’Riordan, L. J., Andrenkov, M., Brown, J.,
Killoran, N., Qi, H., and Dhand, I. (2022). Jet: Fast
quantum circuit simulations with parallel task-based
tensor-network contraction. Quantum, 6:709.
Parallel Tensor Network Contraction for Efficient Quantum Circuit Simulation on Multicore CPUs and GPUs
127
