
Behavior Detection of Quadruped Companion Robots Using CNN:
Towards Closer Human-Robot Cooperation
Piotr Artiemjew
1 a
, Karolina Krzykowska-Piotrowska
2 b
and Marek Piotrowski
3 c
1
Faculty of Mathematics and Computer Science, University of Warmia and Mazury in Olsztyn, Poland
2
Faculty of Transport, Warsaw University of Technology, Poland
3
Faculty of Economic Sciences, University of Warmia and Mazury in Olsztyn, Poland
Keywords:
Mobile Robotics, Behaviour Tracking, Convolutional Neural Networks (CNN), Spot Boston Dynamics,
Unitree Go2 Pro, Human–Robot Interaction.
Abstract:
In a world where mobile robotics is increasingly entering various areas of people’s lives, creating systems
that track the behavior of mobile robots is a natural step toward ensuring their proper functioning. This is
particularly important in cases where improper use or unpredictable behavior may pose a threat to the envi-
ronment and, above all, to humans. It should be emphasized that this is especially relevant in the context of
using robotic solutions to improve the quality of life for people with special needs, as well as in human–robot
interaction. Our primary aim was to verify the experimental effectiveness of classification based on convo-
lutional neural networks for detecting behaviours of four-legged robots. The study focused on evaluating the
performance in recognising typical robot poses. The research was conducted in our robotics laboratory, using
Spot and Unitree Go2 Pro quadruped robots as experimental platforms. We addressed the challenging task of
pose recognition without relying on motion tracking — a difficulty particularly pronounced when dealing with
rotations.
1 INTRODUCTION
With increasing automation and the growing imple-
mentation of robots in our daily lives, it is becoming
crucial to develop effective systems to recognise
their behaviour, especially in the context of walking
robots that are designed to act as human companions.
The coexistence of human and machine poses new
challenges, and one of the most important is to under-
stand and predict the actions of robots to ensure the
safety and comfort of their human companions. The
research problem related to human-robot cooperation
has been one of the important research threads un-
dertaken in various fields of science for years. There
is no shortage of research initiatives regarding the
cooperation of specific social groups with robots, for
example older people and people with reduced mobil-
ity (Hersh(2015); Harmo(2005); Kawamura(1994);
Jackson(1993); Martinez-Martin(2020)).
a
https://orcid.org/0000-0001-5508-9856
b
https://orcid.org/0000-0002-1253-3125
c
https://orcid.org/0000-0002-1977-5995
It is worth emphasizing that there is a notice-
able need for interdisciplinary research on this issue
and the need to implement deep learning technology
to improve human-robot cooperation. In this context,
creating advanced systems to recognise the behaviour
of walking robots is essential to build trust and
harmonious coexistence between humans and their
mechanical companions. These systems enable the
identification and interpretation of a range of robot
actions, which is key to ensuring their effective and
safe interaction with humans and the environment
(Krzykowska(2021)). By understanding the inten-
tions and capabilities of robots, it becomes possible
not only to avoid potential misunderstandings and
conflicts, but also to better exploit their potential to
help humans. Furthermore, the development of such
systems is not only of practical importance, but also
ethical. As robots become more autonomous and
capable of making decisions, it becomes important
that their actions are transparent and understandable
to humans. This, in turn, raises the issue of account-
ability and control of machines, which is essential
to maintain public trust in the face of the growing
presence of robots in our lives. Consequently, the
Artiemjew, P., Krzykowska-Piotrowska, K., Piotrowski and M.
Behavior Detection of Quadruped Companion Robots Using CNN: Towards Closer Human-Robot Cooperation.
DOI: 10.5220/0013548200003964
In Proceedings of the 20th International Conference on Software Technologies (ICSOFT 2025), pages 281-287
ISBN: 978-989-758-757-3; ISSN: 2184-2833
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
281

development of effective systems for recognising the
behaviour of walking robots is not only a technolog-
ical challenge, but also a social imperative to ensure
that advances in robotics serve the good of humanity
by promoting supportive and positive relationships
between humans and their robotic companions. The
use of deep machine learning methods in the context
of potentially improving the effectiveness of human-
robot cooperation is a popular research thread. This
applies, for example, to learning emotion expressions
to a human companion robot (Churamani(2017)),
deep learning of emotion and sentiment recognition
(Fung(2016)) or a gesture recognition approach for
facilitating interaction between humans and robots
(Yahaya(2019)). Our main objective was to design
a classifier that gives the ability to distinguish the
position of a companion robot. To this end, we cre-
ated a collection of samples in the robotics laboratory
representing the different classes. As a reference
classifier, we used convolutional neural networks,
a classical LeNet type (Lecun(1998); Goodfel-
low(2016); Almakky(2019)) and a quaternion neural
network (Niemczynowicz(2023)).
Figure 1: Graphical abstract.
The structure of the paper is as follows: Section
2 and Section 3 present potential applications and re-
lated work. Section 4 describes the model settings.
Section 5 introduces the experimental setup and sum-
marizes the results. Finally, Section 6 provides the
conclusions. Let’s move on to discuss the research
methodology.
2 POTENTIAL APPLICATIONS
Although the primary objective of this study was
to experimentally evaluate the effectiveness of robot
pose classification using convolutional and quaternion
neural networks, the developed approach holds sig-
nificant potential for broader application in various
domains. Below, we outline several promising areas
where such methods could be further explored and
adapted for real-world use.
2.1 Assistive Technologies and Elderly
Care
Behaviour recognition systems can be implemented
in robotic assistants used by elderly or mobility-
impaired individuals. These systems may help detect
abnormal robot behaviours, such as falls or movement
errors, improving user safety and enabling timely in-
tervention by caregivers or autonomous correction
mechanisms.
2.2 Industrial Automation and Logistics
In warehouses and production lines, legged or mo-
bile robots are becoming more common. Recognising
robot posture in such settings can support task moni-
toring, reduce collision risks, and improve system di-
agnostics by detecting mechanical anomalies through
motion patterns.
2.3 Search and Rescue Operations
In disaster response scenarios—such as building col-
lapses or hazardous environments—legged robots are
deployed for terrain exploration. The ability to recog-
nise and interpret the robot’s posture could inform op-
erators about potential failures or obstacles, aiding in
faster and safer decision-making during search and
rescue missions.
2.4 Forestry and Agroforestry
This area represents an underresearched but promis-
ing domain for mobile robotics. Robots equipped
with pose recognition can assist in tasks such as mon-
itoring forest conditions, navigating uneven terrain, or
performing semi-autonomous actions. The approach
may support enhanced motion control, safety, and en-
vironmental awareness (Schraick(2024)).
2.5 Educational Robotics and Social
Interaction
In educational or public engagement settings, robots
are used to interact with children or general audi-
ences. Recognising robot positions may improve
the naturalness and responsiveness of these interac-
tions—for example, by allowing the robot to sit, ob-
ICSOFT 2025 - 20th International Conference on Software Technologies
282
serve, or mimic human gestures in a socially appro-
priate manner.
2.6 Competitive Robotic Sports
In robotic competitions such as RoboCup, posture
recognition may contribute to real-time game analy-
sis, rule enforcement, and performance diagnostics.
Detecting intentional or faulty movement patterns
could aid in improving training algorithms and tac-
tical planning.
2.7 Public Space Patrol and
Surveillance
Mobile robots used in campus security, parks, or pub-
lic infrastructure could benefit from autonomous be-
haviour monitoring. Posture recognition could assist
in detecting anomalies—such as falling, obstruction,
or route deviation—and trigger alerts for human su-
pervision or corrective actions.
2.8 Rehabilitation and Physical
Therapy
Robots used in therapeutic exercises may require the
ability to adapt to patient movements. Recognising
their own posture in relation to patients can enhance
interactive protocols and allow for more dynamic and
personalised rehabilitation sessions.
3 RELATED WORKS
Traditional approaches based on handcrafted fea-
tures and rule-based logic are still commonly used
in robotic systems but show limited adaptability in
complex scenarios. As discussed by Fabisch et al.
(Fabisch(2019)), the application of machine learning
to behavior learning in robotics, especially for legged
or sensor-rich robots, remains an evolving field with
significant potential and outstanding challenges. In
contrast, deep learning methods, particularly convo-
lutional neural networks (CNNs), offer significant ad-
vantages in terms of feature extraction and scalability
(Ruiz(2018); Cebollada(2022)). These methods have
been successfully applied in activity recognition do-
mains, such as human behaviour classification, and
are gaining relevance in robotic applications involv-
ing visual input. Moreover, in the context of social
robotics, understanding robot posture plays an impor-
tant role in building trust and engagement during hu-
man–robot interaction.
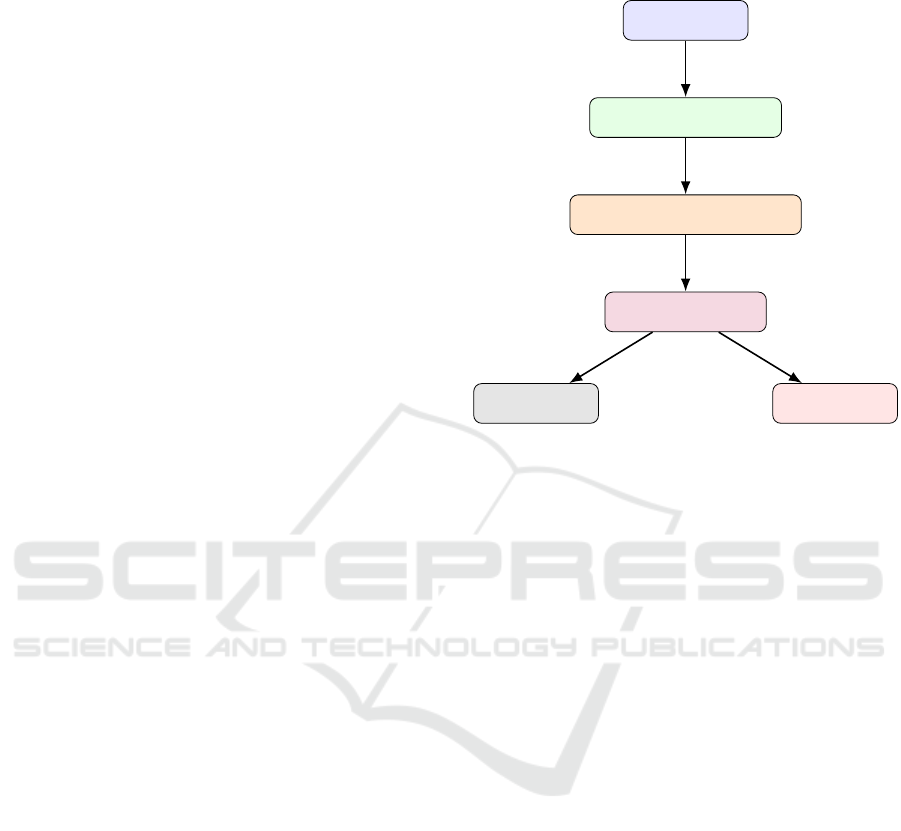
4 METHODOLOGY
Camera / Sensor
Image Capture & Preprocessing
Behavior Recognition (Trained Model)
Detected Behavior & Pose
User Interface
Safety Center
Figure 2: System architecture for quadruped robot behavior
recognition.
Our primary aim was to verify the experimental effec-
tiveness of classification based on convolutional neu-
ral networks on four-legged robots behaviour detec-
tion - using Spot and Unitree Go2 pro. LeNet (Le-
cun(1998); Goodfellow(2016); Almakky(2019)) type
ConvNet (Goodfellow(2016); Lou(2020)) - see the
Fig. 3. And we tested the effectiveness of a quater-
nion neural network (Niemczynowicz(2023)), whose
architecture you can see in Fig. 4.
model_real = kr.Sequential([
layers.Conv2D(8, kernel_size=(3, 3), activation="relu",
input_shape=Xtr.shape[1:]),
layers.MaxPooling2D(pool_size=(2, 2)),
layers.Conv2D(16, kernel_size=(3, 3), activation="relu"),
layers.MaxPooling2D(pool_size=(2, 2)),
layers.Conv2D(16, kernel_size=(3, 3), activation="relu"),
layers.MaxPooling2D(pool_size=(2, 2)),
layers.Conv2D(32, kernel_size=(3, 3), activation="relu"),
layers.MaxPooling2D(pool_size=(2, 2)),
layers.Flatten(),
layers.Dropout(0.5),
layers.Dense(1, activation=None)
])
model_real.compile(optimizer=’adam’,
loss=kr.losses.BinaryCrossentropy(from_logits=True),
metrics=[kr.metrics.BinaryAccuracy(threshold=0.0)])
Figure 3: Applied architecture in ConvNet.
Let’s move on to discuss the experimental part and
the results of the study.
Behavior Detection of Quadruped Companion Robots Using CNN: Towards Closer Human-Robot Cooperation
283

model_hyper = kr.Sequential(
[
layers.Input(shape=Xtr.shape[1:]),
HyperConv2D(2, kernel_size=(3, 3), activation="relu", algebra = quat),
layers.MaxPooling2D(pool_size=(2, 2)),
HyperConv2D(4, kernel_size=(3, 3), activation="relu", algebra = quat),
layers.MaxPooling2D(pool_size=(2, 2)),
HyperConv2D(4, kernel_size=(3, 3), activation="relu", algebra = quat),
layers.MaxPooling2D(pool_size=(2, 2)),
HyperConv2D(8, kernel_size=(3, 3), activation="relu", algebra = quat),
layers.MaxPooling2D(pool_size=(2, 2)),
layers.Flatten(),
layers.Dropout(0.5),
layers.Dense(1, activation=None),
]
)
quat = np.array([[-1,+1,-1],[-1,-1,1],[1,-1,-1]])
Figure 4: Applied architecture of Qwaternion network. quat
= Quaterions.
5 EXPERIMENTAL PART AND
RESULTS
In the deep neural network classification experiments,
we divided the image sets into a training subset and
the validation test set with an 60/40 split. To es-
timate the quality of the classification, we used the
Monte Carlo Cross Validation (Xu(2001); Goodfel-
low(2016)) technique (MCCV5, i.e., five times train
and test), presenting average results. In the exper-
iments, the test (validation) system is applied in a
given iteration to the model to check the final effi-
ciency and observe the overlearning level. By eval-
uating in each iteration of learning an independent
validation set (not affecting the network’s learning
process), we can determine the degree of generaliza-
tion of the model. In evaluating experiments, accu-
racy in a balanced version is often recommended, i.e.,
the average accuracy of all classes classified (Broder-
sen(2010)). In our experiments, we use the Coss En-
tropy Loss version, which can exceed a value of 1, to
clearly indicate where the model is malfunctioning.
We scaled images to 100 × 100 pixels to ensure the
same size of the input for the network. We fed the ar-
tificial neural network with data after four alternating
convolutional and max-pooling steps. We used max-
pooling because it is the most effective technique for
reducing the sizes of images, which works well with
neural network models. Such an approach turned out
to be better in practice than average pooling (Brown-
lee(2019)). The convolutional layers extract features
from images before they are fed into the network. The
activation function of hidden layers was ReLU, and
the output layer had raw values. The loss function
took the form of categorical cross-entropy. Thus, it
could be higher than one. To train the neural network,
we used RGB color channels and applied the Adam
optimizer (Kingma(2015)). For quaternion networks,
we used the HSV color model. We carried out the
training over 50 epochs (for Spot), and 100 epochs
(for Unitree). The batch size was 16. We fitted the
above parameters experimentally.
In the experimental session we learned to distin-
guish spot behaviour (and for the most challengig
poses also Unitree Go2 pro poses), we have a full list
of experimental variations in Tab 1. We can see sam-
ples of each class in Fig 5.
Figure 5: Examples of Spot poses: Top left = Rotation on
the shorter side, Top right = Sitting, Middle left = Standing,
Middle right = Turning left, Bottom left = Turning right,
Bottom right = Rotation on the longer side.
Table 1: Experimental variants.
Pose
1
Pose
2
Result
Spot case
Standing Sitting robot Fig. 6
Standing Rotation on the longer side Fig. 7
Standing Rotation on the shorter side Fig. 8
Turning left Turning right Fig. 9
Standing Turning right Fig. 10
Unitree case
Turning left Turning right Fig. 12
We performed all the experiments in a similar
way. Thus, our results show how the MCCV5 method
works in each learning epoch and present the results
of five internal tests and the average result.
Various poses of the robot were analyzed, includ-
ing standing vs. sitting, standing vs. turning on the
long side, standing vs. turning on the shorter side,
turning left vs. turning right, and standing vs. turning
ICSOFT 2025 - 20th International Conference on Software Technologies
284
right, which are described in detail and shown in Fig-
ures 6, 7, 8, 9, 10 and 12 and listed in Table 1. Exper-
imental results showed that the quaternion network,
thanks to the use of faster and more compact convo-
lution, learns faster than the classical convolutional
network, but the final results of the two networks are
similar.
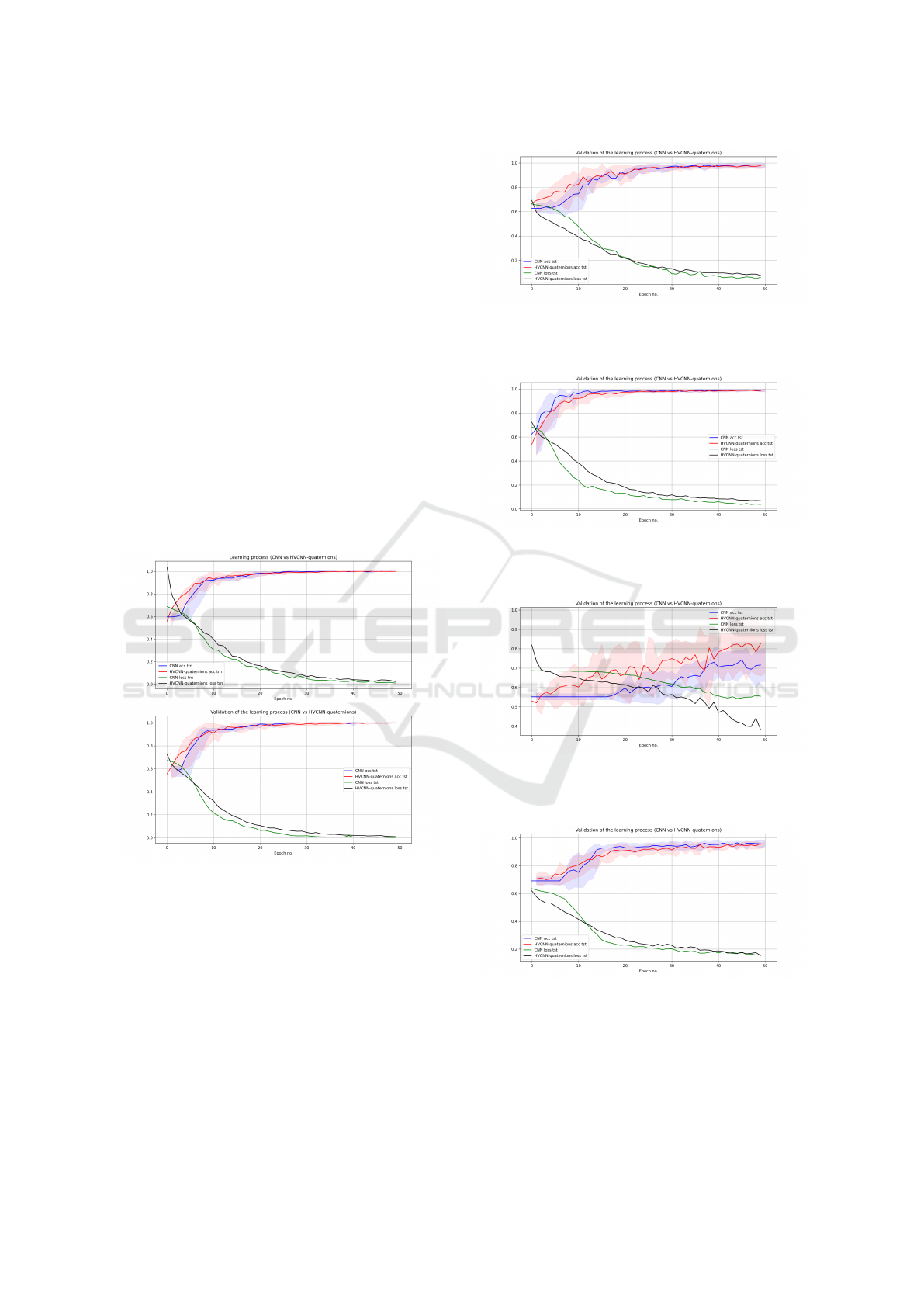
The following results were achieved in the differ-
ent variants of the robot’s posture recognition:
In the standing vs sitting variant, results close to
100% were achieved for the validation data, allowing
the learning to stop after only about 30 iterations. In
the variant of standing vs rotating on the longer and
shorter side, the results exceeded 95% for the valida-
tion data, also after about 30 iterations. Recognizing
the direction of rotation (left vs. right) proved to be
the most difficult, with results exceeding 80% after
about 50 iterations. In this case, the quaternion net-
work showed better performance. In the variant of
standing vs. turning right, the results exceeded 90%,
with a slight advantage for ConvNet in the more diffi-
cult variant.
Figure 6: Spot case study: Classification using CNNs and
QCNNs. Standing vs sitting robot. The top image shows
the learning process, the bottom validation.
Seeing the results of the study, we decided to test
the most difficult variant, the recognition between
turning right and left on another four-legged robot
Unitree Go2 pro - see samples of classes 11. We can
conclude that the quaternion network learns faster and
achieves more stable results although comparable to
the CNN. When recognising poses on which we see
a left or right turn, our models achieved an average
accuracy efficiency of around 0.75. That is, slightly
worse results than detection when observing Spot.
Figure 7: Spot case study: Classification using CNNs and
QCNNs. Standing vs Rotation on the longer side. Valida-
tion of the learning process.
Figure 8: Spot case study: Classification using CNNs and
QCNNs. Standing vs Rotation on the shorter side. Valida-
tion of the learning process.
Figure 9: Spot case study: Classification using CNNs and
QCNNs. Turning right vs left. Validation of the learning
process.
Figure 10: Spot case study: classification using CNNs and
QCNNs. Standing vs Turning right. Validation of the learn-
ing process.
Behavior Detection of Quadruped Companion Robots Using CNN: Towards Closer Human-Robot Cooperation
285
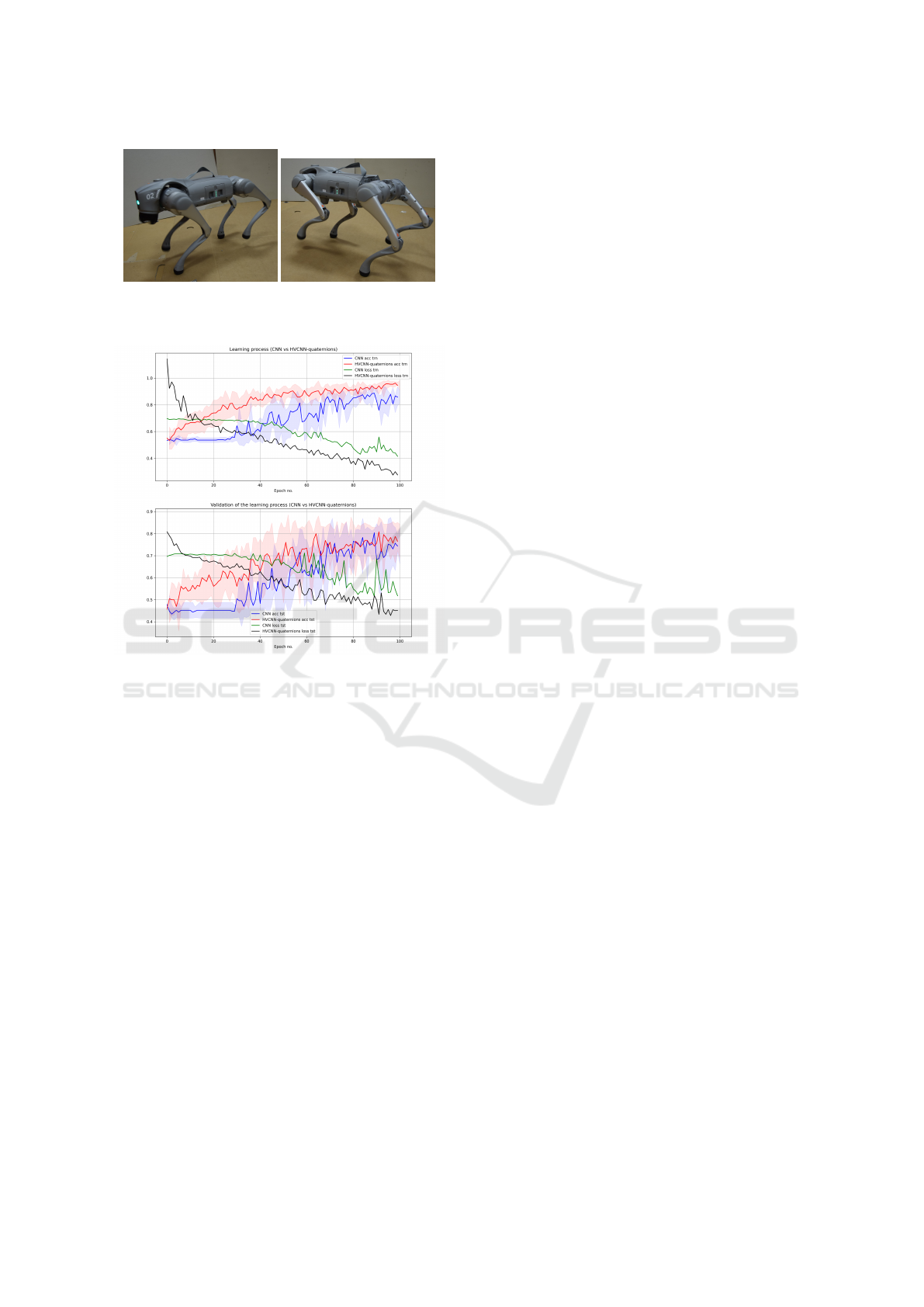
Figure 11: Examples of Unitree Go2 pro robot poses: Top
= Turning left, Bottom = Turning right.
Figure 12: Unitree Go2 pro case study: classification using
CNNs and QCNNs. Turning right vs left. The top image
shows the learning process, the bottom validation.
6 CONCLUSIONS
The research showed that the use of a Quaternion
Neural Network and a classical Convolutional Net-
work (ConvNet) type of LeNet is an effective method
for learning and recognizing the behavior of a walk-
ing companion robot, such as the Spot robot from
Boston Dynamics and Unitree Go2 pro. Experimental
results confirmed the high performance of both types
of networks in different variants of the robot’s behav-
ior recognition, with slight differences in performance
depending on the task’s complexity. The imperfection
of the technological solutions and the dependence of
the level of effectiveness of their operation on many
external factors may pose some kind of threat to their
users and the environment. In this context, the devel-
opment of systems monitoring the behavior of walk-
ing robots used to cooperate with humans seems to
be a necessity. The results of our study have impor-
tant implications for the development of robot behav-
ior detection and recognition systems, which can help
improve robot-human interaction and increase the ef-
ficiency of robots in a variety of environments. We
believe that this may be extremely important, espe-
cially in the context of cooperation between walking
robots and people with special needs, including the
elderly and disabled people. In future research, we
plan to add an additional motion tracking module to
support robot behaviour detection.
ACKNOWLEDGEMENTS
We would like to thank Aleksandra Szpakowska for
preparing the data for the experiments. The article
has been supported by the Polish National Agency
for Academic Exchange Strategic Partnership Pro-
gramme under Grant No. BPI/PST/2021/1/00031.
Research was funded by the Warsaw University of
Technology within the Excellence Initiative: Re-
search University (IDUB) programme Young PW.
HELPER – High Expert Level optimization of the
Process of Exploitation of a companion Robot dedi-
cated for elderly No.1820/103/Z01/2023. This work
has been supported by a grant from the Ministry of
Science and Higher Education of the Republic of
Poland under project number 23.610.007-110.
REFERENCES
LeNail, A. NN-SVG: Publication-Ready Neural Network
Architecture Schematics. J. Open Source Softw. 2019,
4, 747.
Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-
based learning applied to document recognition. Pro-
ceedings of the IEEE 1998, 86(11), 2278–2324.
Lou, G.; Shi, H. Face image recognition based on convolu-
tional neural network. China Communications 2020,
17(2), 117–124.
Hunter, J. D. Matplotlib: A 2D Graphics Environment.
Computing in Science Engineering 2007, 9(3), 90–95.
Brownlee, J. A Gentle Introduction to Deep Learning for
Face Recognition. Deep Learning for Computer Vi-
sion 2019.
Kingma, D. P.; Ba, J. Adam: A Method for Stochastic Op-
timization. CoRR 2015, abs/1412.6980.
Qing-Song Xu and Yi-Zeng Liang, Monte Carlo cross
validation, Chemometrics and Intelligent Laboratory
Systems, vol. 56, no. 1, pp. 1–11, 2001. DOI:
10.1016/S0169-7439(00)00122-2.
Brodersen, K. H., Ong, C. S., Stephan, K. E., and Buh-
mann, J. M.: The Balanced Accuracy and Its Posterior
Distribution, in Proceedings of the 2010 20th Interna-
tional Conference on Pattern Recognition (ICPR ’10),
IEEE Computer Society, USA, 2010, pp. 3121–3124,
https://doi.org/10.1109/ICPR.2010.764
ICSOFT 2025 - 20th International Conference on Software Technologies
286

Almakky, I.; Palade, V.; Ruiz-Garcia, A. Deep Convolu-
tional Neural Networks for Text Localisation in Fig-
ures From Biomedical Literature. In Proceedings of
the 2019 International Joint Conference on Neural
Networks (IJCNN); 2019; pp. 1–5.
Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learn-
ing. MIT Press, 2016. Available online: http://www.
deeplearningbook.org (accessed on 4 March 2023).
Niemczynowicz, A., Kycia, R. A., Jaworski, M.,
Siemaszko, A., Calabuig, J. M., Garcia-Raffi, L.
M., Schneider, B., Berseghyan, D., Perfiljeva, I.,
Nov
´
ak, V., Artiemjew, P.: Selected aspects of com-
plex, hypercomplex and fuzzy neural networks. CoRR
abs/2301.00007 (2023)
Hersh, M. Overcoming barriers and increasing indepen-
dence–service robots for elderly and disabled people.
International Journal of Advanced Robotic Systems,
2015, 12.8: 114.
Harmo, P., et al. Needs and solutions-home automation
and service robots for the elderly and disabled. In:
2005 IEEE/RSJ international conference on intelli-
gent robots and systems. IEEE, 2005. p. 3201-3206.
Kawamura, K.; Iskarous, M. Trends in service robots for the
disabled and the elderly. In: Proceedings of IEEE/RSJ
International Conference on Intelligent Robots and
Systems (IROS’94). IEEE, 1994. p. 1647-1654.
Jackson, R. D. Robotics and its role in helping disabled peo-
ple. Engineering Science & Education Journal, 1993,
2.6: 267-272.
Martinez-Martin, E.; Escalona, F.; Cazorla, M. Socially as-
sistive robots for older adults and people with autism:
An overview. Electronics, 2020, 9.2: 367.
Churamani, N., et al. Teaching emotion expressions to a hu-
man companion robot using deep neural architectures.
In: 2017 international joint conference on neural net-
works (IJCNN). IEEE, 2017. p. 627-634.
Fung, P., et al. Towards empathetic human-robot interac-
tions. In: Computational Linguistics and Intelligent
Text Processing: 17th International Conference, CI-
CLing 2016, Konya, Turkey, April 3–9, 2016, Re-
vised Selected Papers, Part II 17. Springer Interna-
tional Publishing, 2018. p. 173-193.
Yahaya, S. W., et al. Gesture recognition intermediary
robot for abnormality detection in human activities.
In: 2019 IEEE Symposium Series on Computational
Intelligence (SSCI). IEEE, 2019. p. 1415-1421.
Krzykowska-Piotrowska, K.; Dudek, E.; Siergiejczyk, M.;
Rosi
´
nski, A.; Wawrzy
´
nski, W. Is Secure Communica-
tion in the R2I (Robot-to-Infrastructure) Model Pos-
sible? Identification of Threats. Energies 2021, 14,
4702. https://doi.org/10.3390/en14154702
Schraick, L.-M. (2024). Usability in Human-Robot Collab-
orative Workspaces. Universal Access in the Informa-
tion Society (UAIS), https://doi.org/10.1007/s10209-
024-01163-6
Ruiz-del-Solar, J., Loncomilla, P. and Soto, N.: A Survey
on Deep Learning Methods for Robot Vision, arXiv
preprint arXiv:1803.10862, 2018.
Fabisch, A., Petzoldt, C., Otto, M., and Kirchner, F.: A Sur-
vey of Behavior Learning Applications in Robotics
– State of the Art and Perspectives, arXiv preprint
arXiv:1906.01868, 2019.
Cebollada, S. Pay
´
a, L., Jiang, X. and Reinoso, O.: Devel-
opment and use of a convolutional neural network for
hierarchical appearance-based localization,” Artificial
Intelligence Review, vol. 55, no. 4, pp. 2847–2874,
2022. 10.1007/s10462-021-10076-2.
Behavior Detection of Quadruped Companion Robots Using CNN: Towards Closer Human-Robot Cooperation
287
