
Research on Location Perception of Fault Points in Railway Tunnel
Operation Inspection Based on Beidou Positioning Fusion UWB
Ruiqiang Shao
Shuohuang Railway Development Co., Ltd. Original Ping Branch, Hebei, 062350, China
Keywords: UWB Technology, Beidou Positioning, Fusion, Railway Tunnel Operation and Maintenance Fault Points,
Location Awareness.
Abstract: The purpose of this paper is to research and develop a fault point location perception system for railway tunnel
operation and inspection based on Beidou positioning fusion UWB, and ensure that the system has the
characteristics of high precision and strong robustness, and can provide real-time monitoring and early
warning functions, so as to solve the problem of difficult fault point location in railway speed transportation
inspection. Firstly, this paper designs a system architecture of Beidou positioning fusion UWB. Then, select
and integrate the relevant hardware devices, and carry out system testing and optimization. Based on the
optimization of system configuration and algorithm, the system shows obvious performance advantages in
many aspects in the test. The results of this paper show that the average positioning accuracy of the optimized
system is 0.6 meters, which is 33% higher than the original. In addition, the problem of signal loss has been
eliminated. In terms of real-time warning response time, it was shortened to 0.5 seconds, and the improvement
rate reached 37.5%. In addition, the detection time of the system from the railway speed to the location of the
fault point of the operation inspection is only 9 minutes, which is 40% shorter than the original design, and
can quickly identify and respond to faults. Based on this, it can be seen that the system can maintain efficient
operation in complex railway tunnels and improve the reliability and safety of railway operation and
inspection.
1 INTRODUCTION
As a key component of railway transportation, it is
difficult to achieve fast and effective operation and
maintenance inspection due to the complex
environment and difficult positioning of railway
tunnels (Badran, Rizk, et al. 2024), (Cui, Yang, et al.
2023). Traditional manual O&M methods have the
problem of poor accuracy in the face of complex
environments and other practical factors (Guo,
Huang, et al. 2023), (Liu, Kang, et al. 2024), and
have great security risks. This paper proposes an
efficient, accurate and reliable fault point location
perception system for railway tunnel operation and
maintenance, which is of great practical significance.
The system integrates BDS and UWB technologies,
which can effectively solve the problem of fault point
location perception in railway tunnel operation and
maintenance inspection. The research method in this
paper is to design the architecture of the system and
integrate Beidou and UWB positioning technologies
to better ensure the efficient operation of the system.
Then, the hardware selection and integration are
carried out. For example, select Beidou and UWB
equipment with high precision, and then realize
system integration. This is followed by system testing
and validation, i.e. a comprehensive test in the
laboratory and an evaluation of the system's
performance. Subsequently, the performance of the
system was optimized in many aspects. After
optimization, the positioning accuracy of the system
has been improved from the original average of 0.9
meters to the subsequent 0.6 meters, an improvement
rate of 33%. At the same time, it also improves the
real-time warning response time by 37.5%, and
finally only needs 0.5 seconds to respond quickly.
Based on this, it can be seen that the system
developed in this research can operate efficiently in
the complex railway tunnel inspection environment,
which can provide certain technical support for the
safety guarantee of related operation and inspection
work.
164
Shao, R.
Research on Location Perception of Fault Points in Railway Tunnel Operation Inspection Based on Beidou Positioning Fusion UWB.
DOI: 10.5220/0013537500004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 1, pages 164-170
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

2 RELATED WORKS
2.1 Application of Beidou Navigation
System (BDS).
The abbreviation of the Beidou Navigation System is
BDS (Badran, Rizk, et al. 2024), which is a set of
global satellite navigation systems independently
developed by China (Luo, Shang, et al. 2024), (Lv,
Yuan, et al. 2024). At present, it has been widely used
in many fields. In recent years, BDS has been well
used in transportation. Studies have shown that it can
be well used in railway transportation positioning,
navigation and timing services, and greatly improve
its traffic safety and operational efficiency.
2.2 The Development of UWB
Technology
UWB technology is characterized by high accuracy,
low power consumption, and good penetration. These
characteristics make it a great advantage in short-
distance positioning. UWB technology has been
maturely applied in many fields, such as indoor
positioning and robot navigation, industrial
monitoring, etc. (Qiao, Yin, et al. 2023), (Sun, Chen,
et al. 2023). Relevant studies have shown that UWB
technology can achieve high positioning accuracy at
the centimeter level, which can provide the possibility
for further high-precision positioning in various
complex environments such as railway tunnels.
2.3 Beidou and UWB Fusion
Positioning Technology
In recent years, the integration of multiple positioning
technologies to improve the positioning accuracy and
robustness in complex environment positioning has
become a new research hotspot. By integrating
Beidou positioning with UWB technology, the
system can greatly improve the location perception
performance of the system at fault points in complex
environments (Wang, Lu, et al. 2023), (Zhang, and
Li, 2023). At present, a new system of multi-sensor
fusion algorithm, orbit constraint model and
cooperative positioning technology has been
proposed to improve the service quality of fault point
location perception and positioning.
3 METHODS
3.1 System Architecture Design
First, the components of the system architecture. The
overall architecture of the fault point location
perception system for railway tunnel operation and
maintenance based on Beidou positioning fusion
UWB is very important. Its design part should
include: (1) Beidou positioning module, referred to as
BDS. BDS is mainly responsible for providing global
satellite navigation signals for the system's position
perception to achieve the initial location of the fault
points of railway tunnel operation and maintenance
with wide coverage. (2) UWB positioning module. It
is mainly used for high-precision and short-distance
positioning in the process of internal inspection of
railway tunnels; (3) Fusion positioning algorithm
module. Combined with the data of Beidou and
UWB, it can provide high-precision positioning
function of the location of fault points in railway
tunnel operation and maintenance [3]. (4) Data
processing and monitoring system. With this system,
the data of the system can be processed and monitored
in real time, and the location of the fault point can be
perceived.
Second, the Beidou positioning module. The main
principle of this module is to use the satellite to
transmit a given pseudo-distance signal to carry out
the location calculation of the fault point of railway
tunnel operation and maintenance. The formula for
calculating it is shown in equation (1).
222
()( )()
ii ii
P
xx yy zz c t
δ
=−+−+−+⋅
(1
)
In Eq. (1),
i
P
it is the receiver and the first
i
satellite
pseudodistances from each other;
, ,
x
yz
is the
position coordinates of the receiver;
, ,
iii
x
yz
is the
i
position coordinates of the first satellite;
c
is the
speed of light;
t
δ
is the constant deviation of the
receiver.
t
δ
is the clock skew of the receiver.
Thirdly, the UWB positioning module. The
module is based on the measurement of the time
difference in the arrival of the signal for high-
precision positioning, as shown in equation (2).
()/
ij i j
Tddc=−
(2
)
Research on Location Perception of Fault Points in Railway Tunnel Operation Inspection Based on Beidou Positioning Fusion UWB
165

In Eq. (2),
ij
T
is
i
j
the time difference between
the signal received by the first and first reference
nodes;
,
ij
dd
In turn, the distance between the signal
from the transmitter to the first
i
and first
j
reference
nodes;
c
It's the speed of light.
Fourth, fusion positioning algorithm. Specifically,
the Kalman filter should be used to fuse the data of
Beidou and UWB to improve the positioning
accuracy and robustness. The calculation process will
be discussed later in the text, but it will be omitted
here.
Fifth, schematic diagram of system architecture. It
demonstrates the interrelationships between the
various modules of the system [4]. The Beidou fusion
UWB positioning data can be processed by the fusion
positioning algorithm module to finally achieve
effective and high-precision positioning of fault
points in the railway tunnel, and can be monitored in
real time.
3.2 Hardware Selection and
Integration
First, hardware selection. For example, for the Beidou
positioning module, a high-precision and low-power
Beidou-dual-band receiver, such as the BGI HBD-2
Beidou receiver [5], should be selected, and at the
same time, equipped with a high-gain antenna to
enhance signal reception. These devices can greatly
improve the positioning accuracy and reliability of
the system; For example, UWB modules. In this
regard, you should choose a centimeter-level UWB
module, such as a DWM1001, and match it with an
omnidirectional antenna, so that the signal coverage
is guaranteed. This step is very important, and the key
reason for this is that it can have an impact on the
positioning capability within the railway tunnel.
Another example is data processing and monitoring
systems. For this, choose a high-performance
embedded processor, such as the NVIDIA Jetson
series, with high-capacity SSD storage. At the same
time, it is necessary to ensure that a variety of
interfaces can be supported to ensure that the system
has a high degree of compatibility.
Second, integration and installation. The first is
module integration. To this end, it is necessary to
rationally arrange the Beidou receiver, UWB module
and data processing platform to ensure the stability of
signal transmission. When integrating, it is also
necessary to pay attention to the specific
circumstances of each component, such as power
management and thermal design [6]. In short, the
effective integration of the components is very
important, it needs to ensure the interoperability
between the devices, and ensure that their fault point
detection is fast and effective. The second is system
debugging. For this purpose, initial commissioning
should be carried out in the laboratory and the
performance of the individual modules, such as
communication and data processing, should be tested
to ensure that the system functions properly. During
debugging, multiple iterative optimizations are
carried out to solve or occur hardware and software
problems. Then, install the fix. To this end, it is
necessary to select the appropriate installation
location based on the specific situation of the railway
tunnel, and at the same time, adopt a stable fixing
method, such as adding mounting brackets on the wall
and beside the track [7]. In the process of installation,
the part of the equipment protection should also be
considered, so that its installation can achieve a
certain degree of safety. Finally, a test of
environmental adaptability is conducted. For
example, comprehensive tests are carried out in the
actual railway tunnel environment and the operational
stability and reliability of the system in different
environments are checked.
3.3 Development of Fusion
Localization Algorithms
In this system, the fundamental reason for UWB
based on Beidou positioning fusion is to improve the
accuracy and robustness of the location perception
and positioning of railway track operation and
maintenance fault points. To this end, it is necessary
to develop a fusion positioning algorithm, so that the
data of Beidou positioning can be effectively fused
with UWB data, and the data of each sensor can be
integrated to achieve high-precision positioning.
First, data preprocessing is performed. Before data
fusion, the data of Beidou and UWB should be
preprocessed, and the steps include noise filtering,
data smoothing, and error correction [8]. Specifically,
noise filtering is to use the bandpass filtering method
to remove high-frequency noise from the signal. Data
smoothing is the use of moving average processing to
smooth the data, so that mutations can be reduced [9].
Error correction needs to be done based on the error
model of the known fault point perception system of
railway track operation and inspection. Secondly,
algorithm design. In order to fuse the data of the two
devices, an algorithm is designed to fuse the data of
Beidou positioning and UWB, and to ensure that it
can be suitable for state estimation of linear dynamic
systems. In this process, the algorithm should be
INCOFT 2025 - International Conference on Futuristic Technology
166

guaranteed to run based on the prediction and update
steps. For the prediction step, see Eq. (3).
|1 1|1
k
kk k k−= − −+xFx Bu
(3)
In Eq. (3), is the estimated
|1kk−
x
value of the state
at the moment
k
;
F
is the state transition matrix;
1| 1kk−−
x
is the
1k −
estimated value of the state at the
moment;
B
is the control input matrix;
k
u
is
k
the
control vector of the moment.
For details on the status update step, see Eq. (4)
and
||1( |1
)
k
kk kk k kk=−+ − −xx KzHx
(4
)
|kk
x
is the updated state estimate;
k
K
is the
Kalman gain matrix;
k
z
is
k
the measurement vector
of the moment, as in Eq. (5);
|1( |1
)
TT
kkk kk=− −+KP HHP HR
(5)
In Eq. (5),
|1kk−
P
is the co-square matrix of the
prediction error;
R
is the covariance matrix of
measurement errors.
Secondly, in view of the above analysis, this paper
needs to make targeted optimization, and the main
optimization measures include: (1) optimizing the
positioning accuracy of the system. Specifically,
increase the number of UWB base stations to cover
all dead zones in railway tunnels and reduce the
impact of signal occlusion and multipath effects; (2)
The optimized algorithm is used to improve its
positioning accuracy in complex environments, and
the optimization formula is referred to Equation (6).
optimized BB UU SS
PWPWPWP=⋅+⋅+⋅
(6
)
in equation (6),
optimized
P
is the positioning
accuracy of the system after the optimization is
completed;
B
W is the weight coefficient of the data of
the Beidou system;
B
P It is the positioning data given
by the Beidou system;
U
W is the weight coefficient
of the UWB data;
u
P is the positioning data provided
by UWB;
S
W is the weight coefficient corresponding
to the data of the sensor;
S
P It is the positioning data
given by the sensor; (3) Improve robustness. Signal
boosters and relay devices are introduced to enhance
signal strength and reduce signal loss. In addition, the
antenna layout needs to be optimized to improve the
propagation path of the signal to minimize the
multipath effect; (4) Optimize the real-time
monitoring and early warning function. In this regard,
it is necessary to optimize the data processing
algorithm of the system, reduce the data processing
delay, and improve the overall response speed of the
system. See Eq. (7) for details
In order to optimize the real-time monitoring and
early warning function of the system, it is necessary
to improve the data processing algorithm and reduce
the data processing delay, so as to improve the overall
response speed of the system, as shown in Eq. (7).
oi p c
TT T T=−Δ−Δ
(7
)
In Eq. (7),
o
T is the response time after the
optimization of the data processing algorithm;
i
T is
the response time of the system before optimization;
p
TΔ
is the latency of data processing minus from this
optimization;
c
TΔ is the reduced delay time of fault
point detection after this optimization; (5) Increase
the tunnel search design to ensure that the system can
still operate stably in high load and extreme
environments, see formula (8) for details
1
1(1)
n
s
i
i
R
R
=
=− −
∏
(8
)
In Eq. (8),
s
R
the overall reliability of the system;
i
R
is
i
the reliability of the first redundant
component;
n
is the number of redundant
components
4 RESULTS AND DISCUSSION
4.1 Introduction to the Test
To test the functionality of the component. For
example, detect whether the functions of various
hardware components in the system, such as the
Beidou positioning module and the UWB positioning
module, are normal, and ensure the stability and
Research on Location Perception of Fault Points in Railway Tunnel Operation Inspection Based on Beidou Positioning Fusion UWB
167
normal state of the data processing platform. It is
important to ensure that all components can
communicate smoothly and that there are no fault
points to detect delays and packet loss [10]. The
environment of a railway tunnel should be simulated
in a laboratory environment, and separate positioning
accuracy tests should be carried out on Beidou and
UWB systems. The overall positioning accuracy of
the design algorithm of the system is tested to ensure
that it is consistent with the expected sub-meter level,
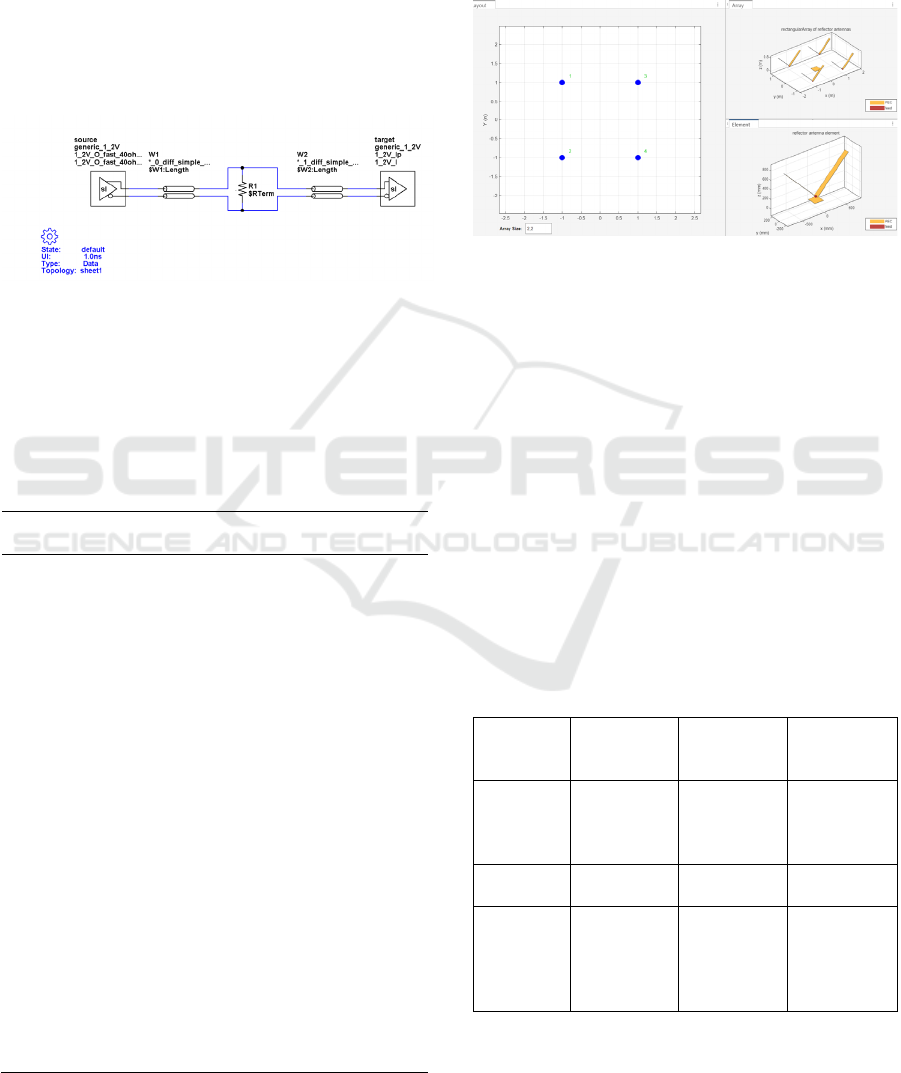
and the simple composition of the positioning system
is shown in Figure 1.
Figure 1: Data transmission for Beidou positioning
4.2 Experiments and Analysis
After the specific functional and system
integration tests of the system, Tables I and II are
derived.
Table 1: Various data of the system after initial experiments
Test Item Test Metric Test
Result
Deficiencies
Component
Function
Test
Normal
Operation
Passe
d
None
Positioning
Accuracy
Test
Accuracy <
1m
Avg.
0.9m
Inadequate
accuracy in
some areas
Robustness
Test
Signal
Interference
Partia
l
Signal
Loss
Insufficient
adaptability
to complex
environment
s
Real-time
Monitoring
and
Warning
Function
Warning
Timeliness <
1s
Avg.
0.8s
Delays
under
extreme
conditions
System
Integration
Test
Normal
Communicatio
n
Passe
d
None
Stability
Test
Long-term
Stable
O
p
eration
Passe
d
None
Power
Consumptio
n Test
Power < 10W Avg.
9.5W
None
First of all, based on Table I, data analysis needs
to be carried out. Specifically, it includes,
The average positioning accuracy is 0.9 meters,
and in some areas of the railway tunnel, the
positioning accuracy is reduced to 1.2 meters. This
may be due to the effects of signal occlusion and
multipath effects, as shown in Figure 2.
Figure 2: Analysis of Beidou RF signals
As can be seen from Figure 2, in some areas of the
railway tunnel that are greatly affected by signal
occlusion and multipath effect, some signals are lost,
which makes the positioning data of the system very
unstable. It can be seen that the system is not able to
achieve high enough adaptability in complex
environments;
In the vast majority of cases, the system's alert
timeliness is 0.8 seconds, and in some extreme cases,
this value increases to 1.5 seconds. This indicates that
the system needs to be optimized to improve its
performance under high loads and extreme
environmental conditions.
Based on these optimization measures, the system
is tested again and new test data are obtained, as
shown in Table 2.
Table 2: Various data of the optimized system
Test Item Pre-
Optimizatio
n Result
Post-
Optimizatio
n Result
Improveme
nt
Positionin
g
Accuracy
Test
Avg. 0.9m Avg. 0.6m 33%
Improveme
nt
Robustnes
s Test
Partial
Signal Loss
Stable
Signal
Signal Loss
Eliminate
d
Real-time
Monitorin
g and
Warning
Function
Avg. 0.8s Avg. 0.5s 37.5%
Improveme
nt
Specifically, complex environmental conditions
in railway tunnels, such as signal occlusion and
INCOFT 2025 - International Conference on Futuristic Technology
168

multipath effects, need to be simulated. The
robustness of the system under these conditions was
tested. It is necessary to verify the real-time data
processing capability of this part, and verify that it has
the fault warning function to ensure that the system
can find and report the fault points in the operation
and maintenance of railway tunnels in a timely
manner. Second, integration testing. The integration
test of the system requires the integration of various
hardware components and software modules, and the
overall system test is carried out to ensure seamless
collaboration between the various parts, as shown in
Figure 3.
Figure 3: Location detection of faults in the tunnel
According to the Beidou test, the location test of
the fault point in the tunnel is relatively stable. Also,
run UWB technology for a long time and test the
stability of the system to see if there are any memory
leaks or crashes in the system. Second, conduct a
power consumption test. The overall power
consumption of the system is tested to ensure that its
power supply is sufficient during the long period of
operation in the tunnel. Table 3 can be obtained by
comparing the data before and after.
Table 3: The improvement of various data in the optimized
system compared to before
Metric Improvement
Average Positioning
Accurac
y
(
m
)
33%
Fault Detection Time
(
mins
)
40%
Real-time Warning
Response (s)
37.5%
Si
g
nal Stabilit
y
Eliminate
d
Power Consum
p
tion
(
W
)
-
S
y
stem U
p
time 10%
Based on the above three tables, experimental
conclusions can be drawn. That is to say, based on the
optimization of the hardware configuration and
algorithm of the system, the system has been
significantly improved in terms of positioning
accuracy and robustness, real-time monitoring and
early warning functions. After optimization, the
positioning accuracy of the system has been improved
by 33%, and the robustness has been greatly
enhanced, and the problem of signal loss has been
basically eliminated. In addition, the system's
monitoring and early warning function has been
improved, and its response speed has increased by
37.5%. It can be seen that the optimization effect is
very obvious, and these optimization work allows the
system to operate efficiently in the complex railway
tunnel environment, and then improve the safety and
reliability of its railway tunnel operation and
inspection.
5 CONCLUSIONS
From the research in this paper, a number of
conclusions can be drawn. First, the system can
achieve high-precision positioning of the fault points
of railway track operation and maintenance. It is clear
that after a certain amount of testing and optimization,
the average positioning accuracy of the system has
been significantly improved, with an improvement
rate of 33%. This fully shows that after the
optimization of the system, it can provide people with
accurate operation and maintenance fault point
perception and positioning services in the complex
railway tunnel environment, reduce errors, and
improve the overall operation and inspection
efficiency. Second, the system is highly robust. The
system has been optimized for robust performance in
complex railway tunnel inspection environments, and
signal dropouts have been eliminated. This shows that
the system can maintain a certain stability and
reliability in the process of railway tunnel operation
and inspection, and improve the safety and continuity
of its operation and inspection work. Third, the
system has certain comprehensive advantages. For
example, it combines the advantages of Beidou and
UWB technology, which not only has strong
capabilities in the perception of the location of fault
points in railway tunnel operation inspection, but also
has excellent real-time performance. Moreover,
through data fusion and algorithm optimization, it can
better adapt to complex environments such as railway
tunnels, and improve the safety and efficiency of
operation and maintenance work. There are
limitations in this study, mainly the dataset of Beidou
positioning fusion and the incomplete collection of
Research on Location Perception of Fault Points in Railway Tunnel Operation Inspection Based on Beidou Positioning Fusion UWB
169

fault point selection of railway tunnels, which will be
analyzed in the future.
REFERENCES
Badran, O., Rizk, M. E. M., Hu, W. H., & Abulanwar, S.
(2024). Gaussian Process Regression-Based Predictive
Fault Location Algorithm For Three-Terminal Lines
Using Two-Terminal Pmus. Ieee Transactions On
Power Systems, 39(4), 5829-5853.
Cui, H. A., Yang, Q., Sun, J., & Zhou, T. (2023). Effect Of
Stray Capacitance In A Distribution Network On The
Accuracy Of Fault Location Based On Electromagnetic
Time Reversal Method. Ieee Transactions On
Electromagnetic Compatibility, 65(4), 1256-1265.
Guo, Z. Q., Huang, W. T., Yu, M. D., & Li, R. (2023). An
Active Pole-To-Ground Fault Location Scheme For Fb-
Mmc-Mtdc System Using The Short-Time Blocking Of
Sub-Modules. International Journal Of Electrical
Power & Energy Systems,2(2),154.
Liu, L., Kang, X. N., Ma, X. W., Chen, X. M., Li, S. C., Li,
X. Y., Et Al. (2024). Mplm Algorithm Based Fault
Location Method For Mtdc Systems Using Backward
Voltage Traveling Waves. Electric Power Systems
Research,2(3),235.
Luo, G. M., Shang, B. Y., Wang, X. J., Liu, Z., Liu, C. Y.,
& He, J. H. (2024). Intelligent Location Method With
Limited Measurement Information For Multibranch
Distribution Networks. Ieee Transactions On
Instrumentation And Measurement,3(2), 73.
Lv, X. D., Yuan, L. F., Cheng, Z., He, Y. G., Yin, B. Q., &
Ding, C. W. (2024). Sparse Bayesian Learning-Based
Topology Reconstruction Under Measurement
Perturbation For Fault Location. Ieee Transactions On
Instrumentation And Measurement,3(3), 73.
Qiao, J., Yin, X., Wang, Y. K., Yin, X. G., Lu, Q. H., Zhu,
L. J., Et Al. (2023). Faulty Phase Selection And
Location Method Of Rotor Ground Fault For Variable
Speed Pumped Storage Generator-Motor. Ieee
Transactions On Power Delivery, 38(6), 4253-4262.
Sun, G. Q., Chen, R. S., Han, Z. Y., Liu, H. G., Liu, M. Y.,
Zhang, K., Et Al. (2023). Accurate Fault Location
Method Based On Time-Domain Information
Estimation For Medium-Voltage Distribution Network.
Electronics, 12(23),18.
Wang, H., Lu, Y., Li, S. Q., Yu, H. A., & Bian, J. (2023).
A Pole-To-Ground Fault Location Method For Dc
Distribution Network Based On High-Frequency Zero-
Mode Current Sparsity. Electric Power Systems
Research,3(3), 225.
Zhang, Y. X., & Li, T. (2023). Fault Location For Overhead
And Cable Hybrid Dc Line Based On The Energy
Transmission Characteristics. Electric Power Systems
Research,11(3), 221.
INCOFT 2025 - International Conference on Futuristic Technology
170
