
Experimental Study of Algorithms for Transforming Decision Rule
Systems into Decision Trees
Kerven Durdymyradov
a
and Mikhail Moshkov
b
Computer, Electrical and Mathematical Sciences & Engineering Division,
King Abdullah University of Science and Technology (KAUST),
Thuwal 23955-6900, Saudi Arabia
Keywords:
Algorithms, Decision Trees, Decision Rule Systems.
Abstract:
The examination of the relationships between decision trees and systems of decision rules represents a signif-
icant area of research within computer science. While methods for converting decision trees into systems of
decision rules are well-established and straightforward, the inverse transformation problem presents consider-
able challenges. Our previous work has demonstrated that the complexity of constructing complete decision
trees can be superpolynomial in many cases. In our book, we proposed three polynomial time algorithms that
do not construct the entire decision tree but instead outline the computation path within this tree for a specified
input. Additionally, we introduced a dynamic programming algorithm that calculates the minimum depth of a
decision tree corresponding to a given decision rule system. In the present paper, we describe these algorithms
and the theoretical results obtained in the book. The primary objective of this paper is to experimentally com-
pare the performance of the three algorithms and evaluate their outcomes against the optimal results generated
by the dynamic programming algorithm.
1 INTRODUCTION
Decision trees (AbouEisha et al., 2019; Breiman
et al., 1984; Moshkov, 2005; Quinlan, 1993; Rokach
and Maimon, 2007) and decision rule systems (Boros
et al., 1997; Chikalov et al., 2013; F
¨
urnkranz et al.,
2012; Moshkov and Zielosko, 2011; Pawlak, 1991;
Pawlak and Skowron, 2007) are extensively utilized
for knowledge representation, served as classifiers
that predict outcomes for new objects and as algo-
rithms for addressing various problems in fault diag-
nosis, combinatorial optimization, and more. Both
decision trees and rules rank among the most inter-
pretable models for classification and knowledge rep-
resentation (Molnar, 2022).
The investigation of the relationships between de-
cision trees and decision rule systems is a significant
area of study within computer science. While the
methods for converting decision trees into systems
of decision rules are well-established and straightfor-
ward (Quinlan, 1987; Quinlan, 1993; Quinlan, 1999),
this paper focuses on the complexities associated with
the inverse transformation problem, which is far from
a
https://orcid.org/0009-0009-7445-3807
b
https://orcid.org/0000-0003-0085-9483
trivial.
This paper advances the syntactic approach to the
investigation of the problem, as proposed in the works
of (Moshkov, 1998; Moshkov, 2001). This approach
operates under the assumption that, rather than having
access to input data, we possess only a system of deci-
sion rules that needs to be transformed into a decision
tree.
Consider a system S of decision rules of the form
(a
i
1
= δ
1
) ∧ ··· ∧ (a
i
m
= δ
m
) → σ,
where a
i
1
, . . . , a
i
m
are attributes, δ
1
, . . . , δ
m
are their
corresponding values, and σ represents a decision.
We examine the algorithmic problem known as
Extended All Rules (denoted as EAR(S)), which in-
volves determining, for a given input (a tuple of val-
ues for all attributes included in S), all rules that can
be satisfied by this input (i.e., those with a true left-
hand side) or establishing that no such rules exist. The
term “Extended” signifies that in this context, any at-
tribute can assume any value, not just those found
within the system S.
Our objective is to minimize the number of
queries required to retrieve attribute values. To
achieve this, we investigate decision trees as potential
algorithms for addressing the stated problem.
Durdymyradov, K. and Moshkov, M.
Experimental Study of Algorithms for Transforming Decision Rule Systems into Decision Trees.
DOI: 10.5220/0013533300004000
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 17th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2025) - Volume 1: KDIR, pages 173-180
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
173

In our work (Durdymyradov and Moshkov, 2024),
we demonstrated that there exist systems of decision
rules for which the minimum depth of the decision
trees required to solve the problem is significantly less
than the total number of attributes in the rule system.
For these specific systems of decision rules, utilizing
decision trees is a reasonable approach.
Our other work (Durdymyradov and Moshkov,
2023) demonstrated that the complexity of construct-
ing complete decision trees can be superpolynomial
in many cases. Therefore in our book (Durdymyradov
et al., 2024), we considered also a different approach:
rather than constructing the entire decision tree, we
focus on polynomial time algorithms that describe the
functioning of the decision tree for a given tuple of at-
tribute values.
In (Durdymyradov et al., 2024), we explored three
such algorithms. Two of these algorithms are based
on node covers for the hypergraph associated with
the decision rule system, where the nodes represent
attributes from the rule system and the edges corre-
spond to the rules. The third algorithm is inherently
greedy in its approach. Additionally, we examined a
dynamic programming algorithm that, given a deci-
sion rule system, returns the minimum depth of deci-
sion trees for that system. In (Durdymyradov et al.,
2024), we did not study the considered algorithms ex-
perimentally.
The primary objective of the present paper is to
experimentally compare the performance of the three
algorithms and to evaluate their outcomes against the
optimal results produced by the dynamic program-
ming algorithm.
In our experiments, we measured execution time,
the average path length, and the depth of deci-
sion trees generated by each algorithm. The results
showed that the third algorithm which uses the greedy
approach, consistently produced shorter paths and re-
quired less time than the other two algorithms. More-
over, the trees constructed by that greedy algorithm
had depths closely approximating the optimal values
achieved by the dynamic programming algorithm. Al-
though others achieved nontrivial theoretical bounds
on the accuracy, no theoretical bound was obtained
for the greedy one. These experimental results reveal
an interesting contrast between theoretical expecta-
tions and practical outcomes.
This paper consists of seven sections. Section 2
presents the main definitions and notation for this pa-
per extracted from the book (Durdymyradov et al.,
2024). Sections 3 and 4 discuss the results obtained in
(Durdymyradov et al., 2024) for three algorithms that
construct not the entire decision tree, but the compu-
tation path within the tree for a given input. Section
5 considers a dynamic programming algorithm from
(Durdymyradov et al., 2024) that determines the min-
imum depth of a decision tree for a given decision
rule system. Section 6 presents the experimental re-
sults, comparing the performance of the three algo-
rithms and evaluating their efficiency against the dy-
namic programming approach. Finally, Sect. 7 sum-
marizes the findings.
2 MAIN DEFINITIONS AND
NOTATION
In this section, we consider main definitions and no-
tation for this paper extracted from the book (Dur-
dymyradov et al., 2024).
2.1 Decision Rule Systems
Let ω = {0, 1, 2, . . .} and A = {a
i
: i ∈ ω}. Elements
of the set A will be called attributes.
A decision rule is an expression of the form
(a
i
1
= δ
1
) ∧ ··· ∧ (a
i
m
= δ
m
) → σ,
where m ∈ ω, a
i
1
, . . . , a
i
m
are pairwise different at-
tributes from A and δ
1
, . . . , δ
m
, σ ∈ ω.
We denote this decision rule by r. The expres-
sion (a
i
1
= δ
1
) ∧ ··· ∧ (a
i
m
= δ
m
) will be called the
left-hand side, and the number σ will be called the
right-hand side of the rule r. The number m will be
called the length of the decision rule r. Denote A(r) =
{a
i
1
, . . . , a
i
m
} and K(r) = {a
i
1
= δ
1
, . . . , a
i
m
= δ
m
}. If
m = 0, then A(r) = K(r) =
/
0. We assume that each
decision rule has an identifier and identifiers are ele-
ments of a linearly ordered set.
Two decision rules r
1
and r
2
are equal if K(r
1
) =
K(r
2
) and the right-hand sides of the rules r
1
and r
2
are equal. Two decision rules are identical if they are
equal and have equal identifiers.
A system of decision rules S is a finite nonempty
set of decision rules with pairwise differen identifiers.
The system S can have equal rules with different iden-
tifiers. Two decision rule systems S
1
and S
2
are equal
if there is a one-to-one correspondence µ : S
1
→ S
2
such that, for any rule r ∈ S
1
, the rules r and µ(r) are
identical.
Denote A(S) =
S
r∈S
A(r), n(S) =
|
A(S)
|
, and d(S)
the maximum length of a decision rule from S. Let
n(S) > 0. For a
i
∈ A(S), let V
S
(a
i
) = {δ : a
i
= δ ∈
S
r∈S
K(r)} and EV
S
(a
i
) = V
S
(a
i
) ∪ {∗}, where the
symbol ∗ is interpreted as a number that does not be-
long to the set V
S
(a
i
). Denote k(S) = max{
|
V
S
(a
i
)
|
:
a
i
∈ A(S)}. If n(S) = 0, then k(S) = 0. We denote by
Σ the set of systems of decision rules.
KDIR 2025 - 17th International Conference on Knowledge Discovery and Information Retrieval
174

Let S ∈ Σ, n(S) > 0, and A(S) = {a
j
1
, . . . , a
j
n
},
where j
1
< · · · < j
n
. Denote EV (S) = EV
S
(a
j
1
) ×
··· × EV
S
(a
j
n
). For
¯
δ = (δ
1
, . . . , δ
n
) ∈ EV (S), denote
K(S,
¯
δ) = {a
j
1
= δ
1
, . . . , a
j
n
= δ
n
}.
We will say that a decision rule r from S is re-
alizable for a tuple
¯
δ ∈ EV (S) if K(r) ⊆ K(S,
¯
δ). It
is clear that any rule with an empty left-hand side is
realizable for the tuple
¯
δ.
We now define the problem Extended All Rules re-
lated to the rule system S: for a given tuple
¯
δ ∈ EV (S),
it is required to find the set of rules from S that are
realizable for the tuple
¯
δ. We denote this problem
EAR(S).
In the special case, when n(S) = 0, all rules from S
have an empty left-hand side. In this case, it is natural
to consider the set S as the solution to the problem
EAR(S).
2.2 Decision Trees
A finite directed tree with root is a finite directed tree
in which only one node has no entering edges. This
node is called the root. The nodes without leaving
edges are called terminal nodes. The nodes that are
not terminal will be called working nodes. A complete
path in a finite directed tree with root is a sequence
ξ = v
1
, d
1
, . . . , v
m
, d
m
, v
m+1
of nodes and edges of this
tree in which v
1
is the root, v
m+1
is a terminal node
and, for i = 1, . . . , m, the edge d
i
leaves the node v
i
and enters the node v
i+1
.
A decision tree over a decision rule system S is a
labeled finite directed tree with root Γ satisfying the
following conditions:
• Each working node of the tree Γ is labeled with an
attribute from the set A(S).
• Let a working node v of the tree Γ be labeled with
an attribute a
i
. Then exactly
|
EV
S
(a
i
)
|
edges leave
the node v and these edges are labeled with pair-
wise different elements from the set EV
S
(a
i
).
• Each terminal node of the tree Γ is labeled with a
subset of the set S.
Let Γ be a decision tree over the decision rule system
S. We denote by CP(Γ) the set of complete paths in
the tree Γ. Let ξ = v
1
, d
1
, . . . , v
m
, d
m
, v
m+1
be a com-
plete path in Γ. We correspond to this path a set of
attributes A(ξ) and an equation system K(ξ). If m = 0
and ξ = v
1
, then A(ξ) =
/
0 and K(ξ) =
/
0. Let m > 0
and, for j = 1, . . . , m, the node v
j
be labeled with the
attribute a
i
j
and the edge d
j
be labeled with the el-
ement δ
j
∈ ω ∪ {∗}. Then A(ξ) = {a
i
1
, . . . , a
i
m
} and
K(ξ) = {a
i
1
= δ
1
, . . . , a
i
m
= δ
m
}. We denote by τ(ξ)
the set of decision rules attached to the node v
m+1
.
A system of equations {a
i
1
= δ
1
, . . . , a
i
m
= δ
m
},
where a
i
1
, . . . , a
i
m
∈ A and δ
1
, . . . , δ
m
∈ ω ∪ {∗}, will
be called inconsistent if there exist l, k ∈ {1, . . . , m}
such that l ̸= k, i
l
= i
k
, and δ
l
̸= δ
k
. If the system
of equations is not inconsistent, then it will be called
consistent.
Let S be a decision rule system and Γ be a decision
tree over S. We will say that Γ solves the problem
EAR(S) if any path ξ ∈ CP(Γ) with consistent system
of equations K(ξ) satisfies the following conditions:
• For any decision rule r ∈ τ(ξ), the relation K(r) ⊆
K(ξ) holds.
• For any decision rule r ∈ S \ τ(ξ), the system of
equations K(r) ∪ K(ξ) is inconsistent.
For any complete path ξ ∈ CP(Γ), we denote by
h(ξ) the number of working nodes in ξ. The value
h(Γ) = max{h(ξ) : ξ ∈ CP(Γ)} is called the depth of
the decision tree Γ.
Let S be a decision rule system. We denote by h(S)
the minimum depth of a decision tree over S, which
solves the problem EAR(S).
Let n(S) = 0. Then there is only one decision tree
solving the problem EAR(S). This tree consists of
one node labeled with the set of rules S. Therefore if
n(S) = 0, then h(S) = 0.
2.3 Additional Definitions
In this section, we consider definitions that will be
used in the description of algorithms.
Let S be a decision rule system and α = {a
i
1
=
δ
1
, . . . , a
i
m
= δ
m
} be a consistent equation system
such that a
i
1
, . . . , a
i
m
∈ A and δ
1
, . . . , δ
m
∈ ω∪{∗}. We
now define a decision rule system S
α
. Let r be a de-
cision rule for which the equation system K(r) ∪ α
is consistent. We denote by r
α
the decision rule ob-
tained from r by the removal from the left-hand side
of r all equations that belong to α. The rules r and r
α
have the same identifiers. We will say that the rule r
α
corresponds to the rule r. Then S
α
is the set of deci-
sion rules r
α
such that r ∈ S and the equation system
K(r) ∪ α is consistent.
We correspond to a decision rule system S a hy-
pergraph G(S) with the set of nodes A(S) and the set
of edges {A(r) : r ∈ S}. A node cover of the hyper-
graph G(S) is a subset B of the set of nodes A(S) such
that A(r) ∩ B ̸=
/
0 for any rule r ∈ S with A(r) ̸=
/
0. If
A(S) =
/
0, then the empty set is the only node cover of
the hypergraph G(S). Denote by β(S) the minimum
cardinality of a node cover of the hypergraph G(S).
Let S be a decision rule system with n(S) > 0. We
denote by S
+
the subsystem of S containing only rules
of the length d(S).
Experimental Study of Algorithms for Transforming Decision Rule Systems into Decision Trees
175

Two decision rules r
1
and r
2
from S
+
are called
equivalent if K(r
1
) = K(r
2
). This equivalence rela-
tion provides a partition of the set S
+
into equiva-
lence classes. We denote by S
max
the set of rules that
contains exactly one representative from each equiva-
lence class and does not contain any other rules. It is
clear that a set of attributes is a node cover for the hy-
pergraph G(S
+
) if and only if this set is a node cover
for the hypergraph G(S
max
).
3 ALGORITHMS BASED ON
NODE COVERS
In this section, we consider two polynomial time al-
gorithms from the book (Durdymyradov et al., 2024)
that, for a given tuple of attribute values, describe the
work on this tuple of a decision tree, which solves the
problem EAR(S). These algorithms are based on node
covers for hypergraphs corresponding to decision rule
systems.
3.1 Algorithms for Construction of
Node Covers
In this section, we consider two algorithms for the
construction of node covers.
3.1.1 Algorithm N
c
Let S be a decision rule system with n(S) > 0. We now
describe a polynomial time algorithm N
c
for the con-
struction of a node cover B for the hypergraph G(S
+
)
such that
|
B
|
≤ β(S
+
)d(S).
Algorithm N
c
.
Set B =
/
0. We find in S
+
the rule r
1
with the minimum
identifier and add all attributes from A(r
1
) to B. We
remove from S
+
all rules r such that A(r
1
)∩A(r) ̸=
/
0.
Denote the obtained system by S
+
1
. If S
+
1
=
/
0, then
B is a node cover of G(S
+
). If S
+
1
̸=
/
0, then we find
in S
+
1
the rule r
2
with the minimum identifier and add
all attributes from A(r
2
) to B. We remove from S
+
1
all rules r such that A(r
2
) ∩ A(r) ̸=
/
0. Denote the ob-
tained system by S
+
2
. If S
+
2
=
/
0, then B is a node cover
of G(S
+
). If S
+
2
̸=
/
0, then we find in S
+
2
the rule r
3
with the minimum identifier, and so on.
3.1.2 Algorithm N
g
Let S be a decision rule system with n(S) > 0. We now
describe a polynomial time algorithm N
g
for the con-
struction of a node cover B for the hypergraph G(S
+
)
such that
|
B
|
≤ β(S
+
)ln|S
max
| + 1. We will say that
an attribute a
i
covers a rule r ∈ S
max
if a
i
∈ A(r).
Algorithm N
g
.
Set B =
/
0. During each step, the algorithm chooses
an attribute a
i
∈ A(S
max
) with the minimum index
i, which covers the maximum number of rules from
S
max
uncovered during previous steps, and add it to
the set B. The algorithm will finish the work when all
rules from S
max
are covered.
3.2 Algorithm A
N
, N ∈ {N
c
, N
g
}
Let S be a decision rule system with n(S) > 0 and
N ∈ {N
c
, N
g
}. We now describe a polynomial time
algorithm A
N
that, for a given tuple of attribute val-
ues
¯
δ from the set EV (S), describes the work on this
tuple of a decision tree Γ, which solves the problem
EAR(S).
Algorithm A
N
.
Set Q := S.
Step 1. If Q =
/
0 or all rules from Q have an empty
left-hand side, then the tree Γ finishes its work. The
result of this work is the set of decision rules from S
that correspond to the rules with an empty left-hand
side from the set Q. Otherwise, we move on to Step
2.
Step 2. Using the algorithm N , we construct a node
cover B of the hypergraph G(Q
+
). The decision tree
Γ sequentially computes values of the attributes from
the set B ordered by ascending attribute indices. As
a result, we obtain a system α consisting of
|
B
|
equa-
tions of the form a
i
j
= δ
j
, where a
i
j
∈ B and δ
j
is the
computed value of the attribute a
i
j
(value of this at-
tribute from the tuple
¯
δ). Set Q := Q
α
and move on to
Step 1.
We now consider bounds on accuracy obtained in
(Durdymyradov et al., 2024) for the algorithm A
N
,
N ∈ {N
c
, N
g
}.
Theorem 1. Let S be a decision rule system with
n(S) > 0. Then the algorithm A
N
c
describes the work
of a decision tree Γ, which solves the problem EAR(S)
and for which h(Γ) ≤ h(S)
3
.
Theorem 2. Let S be a decision rule system with
n(S) > 0. Then the algorithm A
N
g
describes the work
of a decision tree Γ, which solves the problem EAR(S)
and for which h(Γ) ≤ h(S)
3
ln(k(S) + 1) + h(S).
KDIR 2025 - 17th International Conference on Knowledge Discovery and Information Retrieval
176

4 COMPLETELY GREEDY
ALGORITHM
Let S be a decision rule system with n(S) > 0. We
now consider a polynomial time algorithm A
G
from
the book (Durdymyradov et al., 2024) that, for a given
tuple of attribute values
¯
δ from the set EV (S), de-
scribes the work on this tuple of a decision tree Γ,
which solves the problem EAR(S). This algorithm is
a completely greedy algorithm by nature.
Algorithm A
G
.
Set Q := S.
Step 1. Set P := Q. If P =
/
0 or all rules from P have
an empty left-hand side, then the tree Γ finishes its
work. The result of this work is the set of decision
rules from S that correspond to the rules with an
empty left-hand side from the set P. Otherwise, we
move on to Step 2.
Step 2. We choose an attribute a
i
∈ A(P) with the
minimum index i, which covers the maximum number
of rules from P. The decision tree Γ computes the
value of this attribute. As a result, we obtain a system
of equations {a
i
= δ}, where δ is the computed value
of the attribute a
i
(value of this attribute from the tuple
¯
δ). Set Q := P
{a
i
=δ}
and move on to Step 1.
One can show that the decision tree Γ described
by the algorithm A
G
solves the problem EAR(S). We
have no bounds on the accuracy of the algorithm A
G
.
5 DYNAMIC PROGRAMMING
ALGORITHM
In this section, we consider a dynamic programming
algorithm from the book (Durdymyradov et al., 2024)
that, for a decision rule system S with n(S) > 0, com-
putes the minimum depth of a decision tree solving
the problem EAR(S). This algorithm uses a directed
acyclic graph (DAG), which nodes are systems of de-
cision rules.
5.1 Construction of DAG ∆(S)
Let S be a decision rule system with n(S) > 0. We now
describe an algorithm A
DAG
that constructs a DAG
∆(S).
Algorithm A
DAG
.
Step 1. Construct a DAG ∆ containing only one node
S that is not marked as processed and move on to Step
2.
Step 2. If all nodes in ∆ are marked as processed, then
return this DAG as ∆(S). The work of the algorithm
is finished.
Otherwise, choose a node Q that is not marked as
processed. If the set of rules Q is empty or contains
only rules with an empty left-hand side, then mark the
node Q as processed and move on to Step 2.
Otherwise, for each attribute a
i
∈ A(Q) and each
number δ ∈ EV
S
(a
i
), add to ∆ an edge that leaves the
node Q, enters the node Q
{a
i
=δ}
, and is labeled with
the equation a
i
= δ. If the node Q
{a
i
=δ}
does not be-
long to ∆, then add it to ∆ and do not mark it as pro-
cessed. Mark the node Q as processed and move on
to Step 2.
A node Q of the DAG ∆(S) will be called terminal
if this node has no leaving edges.
5.2 Dynamic Programming Algorithm
A
DP
Let S be a decision rule system with n(S) > 0. We
now describe a dynamic programming algorithm A
DP
,
which returns the minimum depth h(S) of a decision
tree that solves the problem EAR(S). This algorithm
is used the DAG ∆(S). During each step, the algo-
rithm labels a node Q of the DAG ∆(S) with a number
H(Q).
Algorithm A
DP
.
Step 1. If the node S of the DAG ∆(S) is labeled with
a number H(S), then return this number as h(S). The
algorithm finishes its work. Otherwise, move on to
Step 2.
Step 2. Choose a node Q in ∆(S) that is not labeled
with a number and such that either Q is a terminal
node or all children of Q are labeled with numbers.
Let node Q be a terminal node. Then label this
node with the number H(Q) = 0 and move on to Step
1.
Let all children of the node Q be labeled with
numbers. For each a
i
∈ A(Q), compute the number
H(Q, a
i
) = 1 + max{H(Q
{a
i
=δ}
) : δ ∈ EV
S
(a
i
)}, label
the node Q with the number H(Q) = min{H(Q, a
i
) :
a
i
∈ A(Q)} and move on to Step 1.
The correctness of this algorithm was proved in
(Durdymyradov et al., 2024).
Theorem 3. Let S be a decision rule system with
n(S) > 0. Then the number H(S) returned by the al-
gorithm A
DP
is equal to the minimum depth h(S) of a
decision tree solving the problem EAR(S).
Experimental Study of Algorithms for Transforming Decision Rule Systems into Decision Trees
177

6 EXPERIMENTAL RESULTS
This section presents the experimental outcomes of
the algorithms utilized in this study. The decision rule
systems used in the experiments were generated by
the algorithm similar to described in (Moshkov and
Zielosko, 2011), which constructs decision rule sys-
tems from decision tables (datasets). The datasets
employed for these experiments were obtained from
the UCI Machine Learning Repository (Kelly et al.,
2024). In some datasets, there are missing values.
Each such value was replaced with the most com-
mon value of the corresponding attribute. In some
datasets, there are equal rows with, possibly, different
decisions. In this case, each group of identical rows
is replaced with a single row from the group with the
most common decision for this group. A summary
of the decision rule systems, along with their relevant
characteristics, is provided in Table 1. Names of deci-
sion rule systems coincide with the names of the ini-
tial datasets.
6.1 First Group of Experiments
In the first group of experiments, we considered five
decision rule systems: Balance Scale (BS), Breast
Cancer (BC), Car Evaluation (CE), Congressional
Voting Records (CVR), and Tic-Tac-Toe Endgame
(TTT). Three algorithms were applied to these sys-
tems: A
N
c
, A
N
g
, and A
G
. The performance of each
algorithm was measured in terms of the maximum
length of complete paths across all possible input tu-
ples (the depth of decision trees generated), the aver-
age length of complete paths across all possible input
tuples, and the average computation time per input tu-
ple in milliseconds. These results are summarized in
Table 2.
6.2 Second Group of Experiments
In the second group of experiments, we considered
four larger decision rule systems: Chess (Ch), Molec-
ular Biology (MB), Mushroom (M), and Soybean (S).
Instead of considering all possible input tuples, we
randomly selected 1000 input tuples. The same three
algorithms were applied, and the results are shown in
Table 3, using the same performance metrics as in the
first group of experiments.
6.3 Third Group of Experiments
In the third group of experiments, subsystems were
created by randomly selecting 10 sample rules from
the decision rule systems: Balance Scale (BS), Breast
Cancer (BC), Car Evaluation (CE), Congressional
Voting Records (CVR), and Tic-Tac-Toe Endgame
(TTT). The depth, average path length, and runtime
were calculated for each subsystem across four algo-
rithms: A
DP
, A
N
c
, A
N
g
, and A
G
. This process was re-
peated 100 times to obtain the average values of these
metrics, as shown in Table 4. The runtime is reported
as the average time for processing one subsystem, in
seconds.
In our experiments, we evaluated the performance
of three algorithms, A
N
c
, A
N
g
, and A
G
, by measur-
ing their efficiency in constructing complete paths in
the decision trees for the given tuples of attribute val-
ues. Our results indicate that, in most cases, the max-
imum and average lengths of paths produced by A
G
are smaller than those generated by the other two al-
gorithms. A similar trend was observed in terms of
computational time.
Additionally, we compared the depth of the de-
cision trees constructed by the three algorithms with
the minimum depth obtained by the algorithm A
DP
.
Among the tested methods, A
G
produced results clos-
est to the optimal ones. Following this, A
N
g
achieved
the next best performance, with A
N
c
ranking third.
Interestingly, the theoretical analysis revealed that
A
N
c
offers the strongest theoretical bounds on accu-
racy, followed by A
N
g
. However, we were unable to
derive any theoretical bounds for the performance of
A
G
.
7 CONCLUSIONS
In this paper, we examined three polynomial time al-
gorithms presented in the book (Durdymyradov et al.,
2024) that focus on outlining the computation path
within decision trees for a specified input, rather than
constructing the entire tree. We performed an experi-
mental comparison of the performance of these algo-
rithms and evaluated their results against the optimal
outcomes produced by the dynamic programming al-
gorithm.
Our experiments revealed that A
G
consistently
outperformed the other algorithms in terms of both
path length and execution time, indicating its effi-
ciency. Moreover, A
G
constructed decision trees with
depths closest to the optimal values achieved by the
dynamic programming benchmark. While A
N
c
pro-
vided the best theoretical bound on the accuracy, fol-
lowed by A
N
g
, no theoretical bounds were derived for
A
G
. These experimental results reveal an interesting
contrast between theoretical expectations and practi-
cal outcomes.
KDIR 2025 - 17th International Conference on Knowledge Discovery and Information Retrieval
178

ACKNOWLEDGEMENTS
Research reported in this publication was supported
by King Abdullah University of Science and Technol-
ogy (KAUST).
REFERENCES
AbouEisha, H., Amin, T., Chikalov, I., Hussain, S., and
Moshkov, M. (2019). Extensions of Dynamic Pro-
gramming for Combinatorial Optimization and Data
Mining, volume 146 of Intelligent Systems Reference
Library. Springer.
Boros, E., Hammer, P. L., Ibaraki, T., and Kogan, A. (1997).
Logical analysis of numerical data. Math. Program.,
79:163–190.
Breiman, L., Friedman, J. H., Olshen, R. A., and Stone,
C. J. (1984). Classification and Regression Trees.
Wadsworth and Brooks.
Chikalov, I., Lozin, V. V., Lozina, I., Moshkov, M., Nguyen,
H. S., Skowron, A., and Zielosko, B. (2013). Three
Approaches to Data Analysis - Test Theory, Rough
Sets and Logical Analysis of Data, volume 41 of In-
telligent Systems Reference Library. Springer.
Durdymyradov, K. and Moshkov, M. (2023). Construction
of decision trees and acyclic decision graphs from de-
cision rule systems. CoRR, arXiv:2305.01721.
Durdymyradov, K. and Moshkov, M. (2024). Bounds on
depth of decision trees derived from decision rule sys-
tems with discrete attributes. Ann. Math. Artif. Intell.,
92(3):703–732.
Durdymyradov, K., Moshkov, M., and Ostonov, A. (2024).
Decision Trees Versus Systems of Decision Rules. A
Rough Set Approach, volume 160 of Studies in Big
Data. Springer. (to appear).
F
¨
urnkranz, J., Gamberger, D., and Lavrac, N. (2012). Foun-
dations of Rule Learning. Cognitive Technologies.
Springer.
Kelly, M., Longjohn, R., and Nottingham, K. (2024). The
UCI Machine Learning Repository.
Molnar, C. (2022). Interpretable Machine Learning. A
Guide for Making Black Box Models Explainable. 2
edition.
Moshkov, M. (1998). Some relationships between deci-
sion trees and decision rule systems. In Polkowski,
L. and Skowron, A., editors, Rough Sets and Current
Trends in Computing, First International Conference,
RSCTC’98, Warsaw, Poland, June 22-26, 1998, Pro-
ceedings, volume 1424 of Lecture Notes in Computer
Science, pages 499–505. Springer.
Moshkov, M. (2001). On transformation of decision rule
systems into decision trees. In Proceedings of the
Seventh International Workshop Discrete Mathemat-
ics and its Applications, Moscow, Russia, January 29
– February 2, 2001, Part 1, pages 21–26. Center for
Applied Investigations of Faculty of Mathematics and
Mechanics, Moscow State University. (in Russian).
Moshkov, M. (2005). Time complexity of decision trees. In
Peters, J. F. and Skowron, A., editors, Trans. Rough
Sets III, volume 3400 of Lecture Notes in Computer
Science, pages 244–459. Springer.
Moshkov, M. and Zielosko, B. (2011). Combinatorial Ma-
chine Learning - A Rough Set Approach, volume 360
of Studies in Computational Intelligence. Springer.
Pawlak, Z. (1991). Rough Sets - Theoretical Aspects of Rea-
soning about Data, volume 9 of Theory and Decision
Library: Series D. Kluwer.
Pawlak, Z. and Skowron, A. (2007). Rudiments of rough
sets. Inf. Sci., 177(1):3–27.
Quinlan, J. R. (1987). Generating production rules from de-
cision trees. In McDermott, J. P., editor, Proceedings
of the 10th International Joint Conference on Artificial
Intelligence. Milan, Italy, August 23-28, 1987, pages
304–307. Morgan Kaufmann.
Quinlan, J. R. (1993). C4.5: Programs for Machine Learn-
ing. Morgan Kaufmann.
Quinlan, J. R. (1999). Simplifying decision trees. Int. J.
Hum. Comput. Stud., 51(2):497–510.
Rokach, L. and Maimon, O. (2007). Data Mining with De-
cision Trees - Theory and Applications, volume 69
of Series in Machine Perception and Artificial Intel-
ligence. World Scientific.
Experimental Study of Algorithms for Transforming Decision Rule Systems into Decision Trees
179
APPENDIX
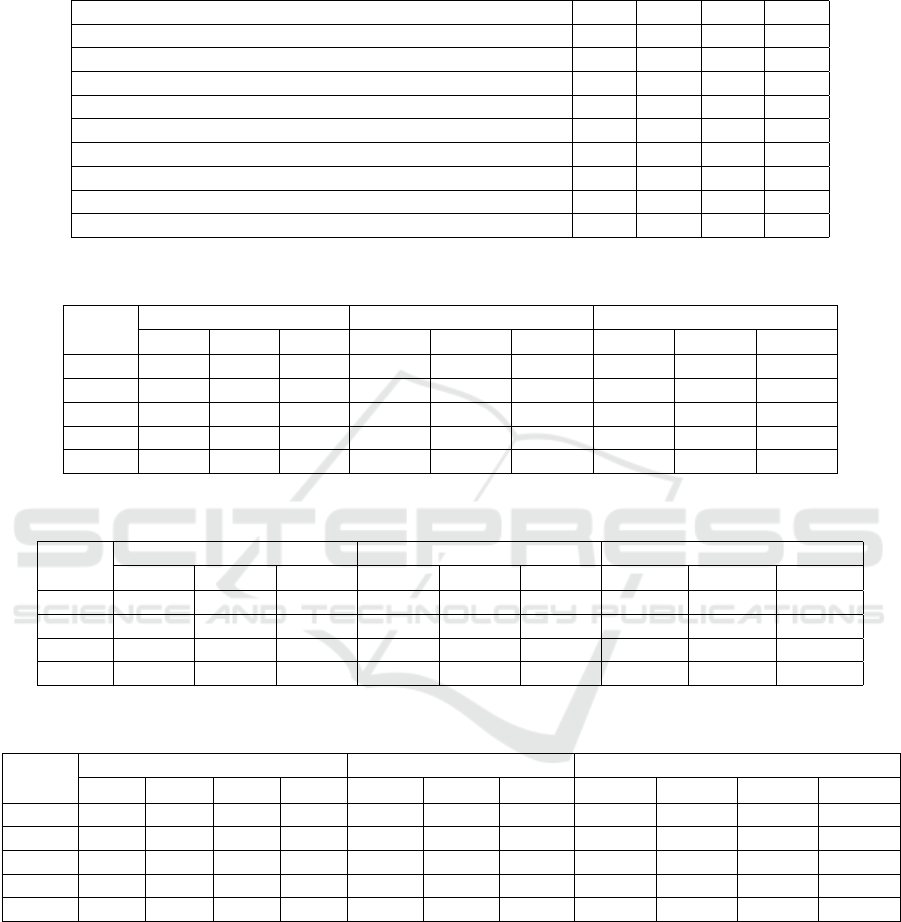
Table 1: Details of the decision rule systems used in the experiments.
Name of decision rule system S
S
S n
n
n(
(
(S
S
S)
)
) d
d
d(
(
(S
S
S)
)
) k
k
k(
(
(S
S
S)
)
) |
|
|S
S
S|
|
|
Balance Scale (BS) 4 4 5 625
Breast Cancer (BC) 9 6 11 266
Car Evaluation (CE) 6 6 4 1728
Congressional Voting Records (CVR) 16 4 2 279
Tic-Tac-Toe Endgame (TTT) 9 5 3 958
Chess (King-Rook vs. King-Pawn) (Ch) 35 11 3 3133
Molecular Biology (Splice-junction Gene Sequences) (MB) 60 5 5 3005
Mushroom (M) 19 2 10 8124
Soybean (Large) (S) 32 5 7 303
Table 2: Performance comparison of three algorithms for the first group of experiments.
Depth Avg. path length Avg. time
A
N
c
A
N
g
A
G
A
N
c
A
N
g
A
G
A
N
c
A
N
g
A
G
BS 4 4 4 4.00 3.84 3.84 7.17 4.37 1.96
BC 9 9 9 7.42 6.46 6.20 3.27 8.43 2.93
CE 6 6 6 6.00 6.00 5.86 1.44 9.46 3.86
CVR 16 16 16 12.75 11.79 11.04 9.28 19.76 5.38
TTT 9 9 9 9.00 8.90 8.79 7.48 11.15 4.99
Table 3: Performance comparison for larger decision rule systems using random samples of 1000 input tuples.
Max. path length Avg. path length Avg. time
A
N
c
A
N
g
A
G
A
N
c
A
N
g
A
G
A
N
c
A
N
g
A
G
Ch 35 35 35 34.33 34.62 33.73 56.96 124.49 30.75
MB 56 48 48 55.12 47.12 46.33 144.05 493.92 136.84
M 18 18 18 17.01 15.54 16.01 394.69 47.80 35.61
S 32 28 27 29.79 25.47 24.47 47.27 62.72 13.90
Table 4: Results for subsystems created from 10 randomly selected sample rules, averaged over 100 iterations.
Depth Avg. path length Avg. time
A
DP
A
N
c
A
N
g
A
G
A
N
c
A
N
g
A
G
A
DP
A
N
c
A
N
g
A
G
BS 4.0 4.0 4.0 4.0 3.93 2.59 2.35 0.75 1.27 3.58 1.58
BC 6.15 6.86 6.2 6.15 5.35 3.72 3.38 62.03 32.61 68.85 24.32
CE 5.62 5.81 5.67 5.64 5.26 4.30 3.68 3.99 3.89 7.91 3.18
CVR 6.38 6.92 6.49 6.38 5.48 4.07 3.73 70.43 2.28 4.05 1.44
TTT 8.09 8.58 8.17 8.12 6.79 4.91 4.48 799.39 104.26 241.78 81.82
KDIR 2025 - 17th International Conference on Knowledge Discovery and Information Retrieval
180
