
Efficiency and Development Effort of OpenCL Interoperability in Vulkan
and OpenGL Environments: A Comparative Case Study
Piotr Pleba
´
nski
a
, Anna Kelm
b
and Marcin Hajder
c
Institute of Computer Science, Cardinal Stefan Wyszynski University, Warsaw, Poland
Keywords:
GPGPU, API, OpenCL, OpenGL, Vulkan, Interoperability.
Abstract:
The increasing demand for high-performance computing has led to the exploration of utilizing General-
Purpose Graphics Processing Units (GPGPUs) for non-graphical tasks. In this paper, we present a comparative
case study of OpenCL interoperability when paired with two widely used graphics APIs: OpenGL and Vulkan.
By implementing an ocean wave simulation benchmark – where OpenCL handles compute-intensive tasks and
the graphics API manages real-time visualization – we analyze the impact of API selection on both execution
performance and development effort. Our results indicate that Vulkan’s low-level control and multi-threaded
design deliver marginal performance improvements under minimal rendering loads; however, its increased
code verbosity and complex synchronization mechanisms lead to a substantially higher development effort.
In contrast, OpenGL, with its more straightforward integration and broad compatibility, provides a practical
alternative for compute-first applications. The insights from this case study offer guidance for developers nav-
igating the trade-offs between raw performance and maintainability in GPU-accelerated environments.
1 INTRODUCTION
Since the advent of programmable graphics process-
ing units (GPUs, also known as graphic cards), there
has always been interest in utilizing them for non-
graphical computational tasks (Harris et al., 2002).
Initially, this had to be done by hacking graphics
application programming interfaces (APIs), for exam-
ple, pretending to render to a texture while in fact
using the fragment shader to perform fluid calcula-
tions (Harris and Gems, 2004).
This has been addressed by the release
of the Compute Unified Device Architecture,
CUDA (NVIDIA Corporation, 2025b), a dedicated
compute API, which allowed programmers to view
their general-purpose GPUs (GPGPUs) as massively
parallel processors rather than means for rendering
graphics.
Open Computing Language, OpenCL (Khronos
Group, 2023a) soon followed as a free and open alter-
native to CUDA, and is now supported by all major
GPGPU vendors.
While direct use of either graphics or compute
a
https://orcid.org/0009-0000-5973-5720
b
https://orcid.org/0000-0002-4975-1994
c
https://orcid.org/0009-0008-2092-8013
APIs is considered low-level today, due to the wide
availability of rendering engines and software for
performing GPU-accelerated calculations (e.g.: Py-
Torch, RAPIDS, MATLAB), a bespoke solution may
still be preferable for performance-sensitive applica-
tions.
One of the common use cases is a combination
of GPGPU-powered simulation with a real-time vi-
sualization of the generated data, e.g., for fluid dy-
namics (Gunadi and Yugopuspito, 2018; Harris and
Gems, 2004). We investigate the case where a com-
pute API is utilized for generating the data, combined
with a graphics API for rendering the results in 3D.
Specifically, we chose OpenCL as the compute API,
and decided to compare the application performance
when combining it with either Vulkan or OpenGL as
graphics API.
Although modern graphics APIs such as Di-
rectX, Metal, or Vulkan support compute pipelines,
their compute shaders are not compatible with each
other (Galvan, 2022), so choosing the visualization
API to implement the simulation would effectively
limit the project to that one solution, and by exten-
sion, to the platforms that support it. Separating the
compute and graphics API grants the application bet-
ter portability, as well as flexibility in the choice of
visualization. Finally, we assume that the application
Pleba
´
nski, P., Kelm, A., Hajder and M.
Efficiency and Development Effort of OpenCL Interoperability in Vulkan and OpenGL Environments: A Comparative Case Study.
DOI: 10.5220/0013529000003964
In Proceedings of the 20th International Conference on Software Technologies (ICSOFT 2025), pages 111-119
ISBN: 978-989-758-757-3; ISSN: 2184-2833
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
111

would be primarily focused on generating simulation
results, so a compute API is the superior choice for
structuring the program around its primary purpose.
We chose OpenCL instead of CUDA (NVIDIA
specific) or HIP (AMD specific) because of the wide
support of the API across hardware vendors (Khronos
Group, 2023a; Acosta et al., 2018). Similarly,
we only investigate the interoperability with Vulkan
and OpenGL due to their wide support across plat-
forms (Khronos Group, 2025a). The APIs we focus
on are all open standards maintained by The Khronos
Group.
When considering which Graphics API to choose
for an application, performance is assumed to be of
high importance - otherwise, the application would
likely be based on a rendering engine or a ready-made
software that fits the task.
For games and graphically-intensive applications,
using the Vulkan API is known to consistently lead to
better performance than other graphics APIs (Dy
´
ndo,
2017, and references therein). The complexity cost
has been widely proven to be worth it in those appli-
cations.
We investigate whether this holds true for appli-
cations where the compute component of the work-
load is significant and is performed independently of
the graphics API. Obviously, the less time the ap-
plication spends rendering graphics with respect to
the time spent on other calculations, the less poten-
tial gains can be expected from the use of a ”faster”
graphics API. However, even at this point our prelim-
inary explorations revealed several nuances, such as
Vulkan’s capacity for yielding very high frames per
second (FPS) numbers at very light workloads, which
may be significant for some low-latency applications.
We examine various aspects of graphics APIs interop-
erability with OpenCL and discuss the performance
implications that follow.
2 GRAPHICS APIs: OpenGL AND
VULKAN COMPARED
2.1 OpenGL
OpenGL is a well established graphics API, with ma-
ture drivers across many platforms, and is well sup-
ported by all GPU vendors. It provides a high level of
abstraction, leading to concise and clearly structured
programs (Peddie, 2022).
OpenGL traces its origins to Silicon Graphics, In-
corporated (SGI) IRIS GL API from the 1980s and
adopted its modern name with its public release in
1992. Since then it has been maintained as an open
standard by The Khronos Group, and in 2004 with
version 2.0 received a major upgrade to better suit the
needs of modern GPUs.
Up to 2023, the OpenGL standard has been regu-
larly updated to support feature extensions that allow
its users to leverage some of the latest advances in
GPGPU technology, such as mesh shading (Kubisch
et al., 2019).
Support of some modern GPU features is missing,
perhaps most notably, there is no ray tracing support
planned for OpenGL (Piers, 2019).
2.2 Vulkan
Vulkan is a relatively new graphics API initially un-
veiled in 2015. Its main focus was enabling better
performance through its three main features:
• low-level, detailed API calls, allowing for
an unprecedented amount of control over the
GPU (Khronos Group, 2025d),
• modern architecture, allowing for multi-threaded
operation and diverse GPU-CPU synchronization
methods (Khronos Group, 2025b), and
• low driver overhead, allowing for efficient com-
munication with the GPU (Kapoulkine, 2025).
While these features allow the programmer to highly
optimize the rendering process, the added benefit is
enabling GPU drivers to better tailor the low-level
execution details to the intended program’s purpose,
thanks to the added detail in every API call and its
context (Khronos Group, 2025c).
2.2.1 Vulkan vs OpenGL
Vulkan’s advantages come at a cost of significantly
higher program complexity with respect to OpenGL.
For most tasks, that can be divided into four areas of
increasing difficulty:
• code size, the sheer amount of code that has to be
understood,
• code complexity, in terms of more variables, de-
pendencies, parameters, and size of manipulated
objects,
• execution complexity, stemming from the com-
plex synchronization mechanisms governing par-
allel program flow, and
• program state complexity, in terms of more API
objects that have to be tracked during program
lifetime.
Comparatively, OpenGL offers a fairly linear execu-
tion model, while in Vulkan running the rendering on
ICSOFT 2025 - 20th International Conference on Software Technologies
112

the GPU in parallel with the code on the CPU is effec-
tively mandatory. Linear program flow can be forced
in Vulkan by explicitly waiting for the GPU to be-
come ”idle” - the vkDeviceWaitIdle function – but
is considered a bad practice and leads to very poor
performance.
3 OpenCL INTEROPERABILITY
WITH GRAPHICS APIs
OpenCL is an API for performing calculations in het-
erogeneous environments. It can be run directly on
the CPU as well as on the GPGPU. It is an open
standard maintained by The Khronos Group (Khronos
Group, 2023a).
The typical workflow for running OpenCL is first
assigning memory buffers for input and output data,
then running an OpenCL kernel that reads the inputs,
performs calculations in a super-parallel manner, and
writes the results to the output buffer. In a real-life
application this would likely involve multiple kernels
and in/out buffers, with execution staged and synchro-
nized using events to optimize performance, but the
end result remains the same. Once the calculations
finish, the result is available to be read from the out-
put buffer by the application running on the CPU.
Graphics APIs operate in a similar way, with as-
sets like 3D geometry and textures being loaded into
GPU memory by the CPU-side program and then uti-
lized by shaders running on the GPU to efficiently
generate images.
Data transfer between CPU and GPU memory is a
relatively slow process, limited by the performance of
the PCI Express (PCIe) bus, and subject to latency in-
curred from memory management operations, as well
as the overhead incurred from performing bus trans-
fers rather than accessing memory directly. Submit-
ting the data to PCIe also consumes CPU execution
time.
Below are the theoretical throughputs at which
each component operates:
• PCIe v5 16x connector has a theoretical band-
width of 64 GB/s,
• CPU-side DDR4 Memory running in quad-
channel configuration at 2000 MHz goes up to
128 GB/s (4 * 64-bit memory bus),
• CPU-side DDR5 Memory running in dual-
channel configuration at 4600 MHz goes up to
147.2 GB/s (2 * 64-bit memory bus),
• GPU-side GDDR6X on a NVIDIA RTX 3090
goes up to 936 GB/s (384-bit memory bus) (Mi-
cron Technology, Inc., 2022), and
• on a NVIDIA RTX 5090, its GDDR7 mem-
ory goes up to 1792 GB/s (512-bit memory
bus) (NVIDIA Corporation, 2025a).
The above numbers demonstrate that copying data
from system memory to the GPU is slow relative
to GPU’s internal transfer speeds. This is where
OpenCL’s interoperability extensions become impor-
tant – both OpenGL and Vulkan support extensions
that allow OpenCL kernels and graphics API shaders
to share GPU memory, which is depicted in Figure 1.
Figure 1: Interoperability relationship between OpenCL
Memory Model and Video Memory shared with rendering
interfaces, see (Raja et al., 2012; Khronos Group, 2023b).
For OpenGL-OpenCL interoperability, the
cl_khr_gl_sharing extension provides the func-
tionality. When the extension is available, it allows
OpenCL to efficiently share OpenGL resources such
as textures and buffer objects without the overhead
of transporting GPU data back and forth to the host
memory. This setup enables real-time data sharing,
where computational results can be rendered almost
directly from the shared memory. If the extension is
not available, OpenCL calculation results must make
the round trip back to the host system and be copied
into a dedicated OpenGL buffer.
For Vulkan-OpenCL interoperability the
cl_khr_external_memory is available. How-
ever, it should be used in concert with the
cl_khr_external_semaphore extension to op-
timize data sharing between the two APIs.
The cl_khr_external_memory extension en-
ables memory sharing between Vulkan and OpenCL
Efficiency and Development Effort of OpenCL Interoperability in Vulkan and OpenGL Environments: A Comparative Case Study
113

by directly accessing Vulkan’s memory objects and
allows direct access to the memory associated with
OpenCL objects to Vulkan shaders.
The cl_khr_external_semaphore extension
manages synchronization, ensuring that compute and
graphics tasks are well-coordinated, preventing con-
flicts during read/write operations on shared re-
sources. This highlights the difference between the
approaches taken by OpenGL and Vulkan, where the
former takes care of the synchronization, while the
latter allows the programmer to specify exactly at
what point during execution should the resources be
available to the other API’s programs.
It should be noted that using APIs, even low-level
ones such as Vulkan, it is merely communicated to
the device and its driver what the expected data flow
should be. It is up to the GPGPU to orchestrate the
shader execution and data transfers as per the API
contract. The programmer shall not make any as-
sumptions pertaining to execution details not guaran-
teed by the Vulkan specification.
4 IMPLEMENTATION AND
METHODOLOGY
In order to measure the impact of graphics API choice
on application performance and complexity, we im-
plemented two conceptually equivalent benchmarks,
one using OpenGL for visualization, the other based
on the Vulkan API.
Our benchmark concept, inspired by (Fl
¨
ugge,
2017), utilizes simulation outputs to drive the ver-
tex shader as a height map (Dempski, 2002). The
simulation is based on the Cooley-Tukey fast Fourier
transform (FFT) algorithm, which optimizes discrete
Fourier transform (DFT) computations. This algo-
rithm decomposes complex wave equations into sim-
pler components, transforming them into a grid for-
mat to enhance computational efficiency. The inno-
vation in (Fl
¨
ugge, 2017) lies in adapting the DFT
technique to GPU architecture, significantly reducing
the computation time required for ocean wave simu-
lations.
4.1 Simulation Details
At a high level both OpenGL and Vulkan implemen-
tations of our benchmark operate in the same man-
ner. Both the OpenCL kernels and the code driving
the computation have intentionally been kept as simi-
lar as possible in both variants.
During the initialization phase, the contexts for
both the compute and graphics APIs are created. Con-
text creation involves enumerating available devices,
verifying they meet minimum requirements, and en-
suring necessary interoperability extensions are sup-
ported.
Once the APIs contexts are ready, OpenCL prepa-
ration is nearly the same for both benchmark vari-
ants. The compute kernels are compiled and setup
for operation, memory buffers are allocated, config-
ured for interoperability and seeded with initial data.
The first round of kernel execution further processes
this startup data to produce optimized wave textures
for running the simulation.
The two notable differences are the extensions
used for interoperability between OpenCL and the
graphics API, and the kernel file format. For
OpenGL-OpenCL interoperability, the shaders are
supplied as GLSL (OpenGL Shading Language) pro-
grams which are compiled during program runtime.
When working with Vulkan, the shaders must be
supplied as SPIR-V (Standard Portable Intermediate
Representation) binaries, which have to be manually
prebuilt – from similar GLSL files – before starting
the program. The GLSL source remains mostly the
same for both versions.
Preparing the graphics context for rendering is
somewhat different between the two benchmarks.
However, similarities can still be outlined at a high
level. For both graphics APIs we start by setting up
various presentation details, such as creating a win-
dow for displaying the results, and allocating image
buffers for storing rendering output. We then pre-
pare vertex buffers for storing the mesh that will be
rendered, and populate them with a flat grid that will
later be transformed in the vertex shader, based on the
OpenCL simulation output.
The presentation part of the program remains sim-
ilar for both variants. After the contexts have been ini-
tialized, the program enters the main rendering loop.
First – marked in Figure 2 with green blocks – the
OpenCL simulation is run to generate values for the
next frame, then the results are made available to the
graphics API context, and used in submitting com-
mands for rendering the next frame. API-specific op-
erations follow, in both cases resulting in rendering
the scene, shown in Figure 2 with a red block.
During rendering, the vertex shader is responsible
for transforming the contents of the vertex buffer in
two ways.
First, it takes the flat grid we created during init
and transforms it into the ocean surface shape based
on the output of the last OpenCL calculation. Each
pixel in the resulting ocean texture corresponds to an
elevation above the flat plane the grid starts at. For
each vertex in the grid, the vertex shader collects the
ICSOFT 2025 - 20th International Conference on Software Technologies
114
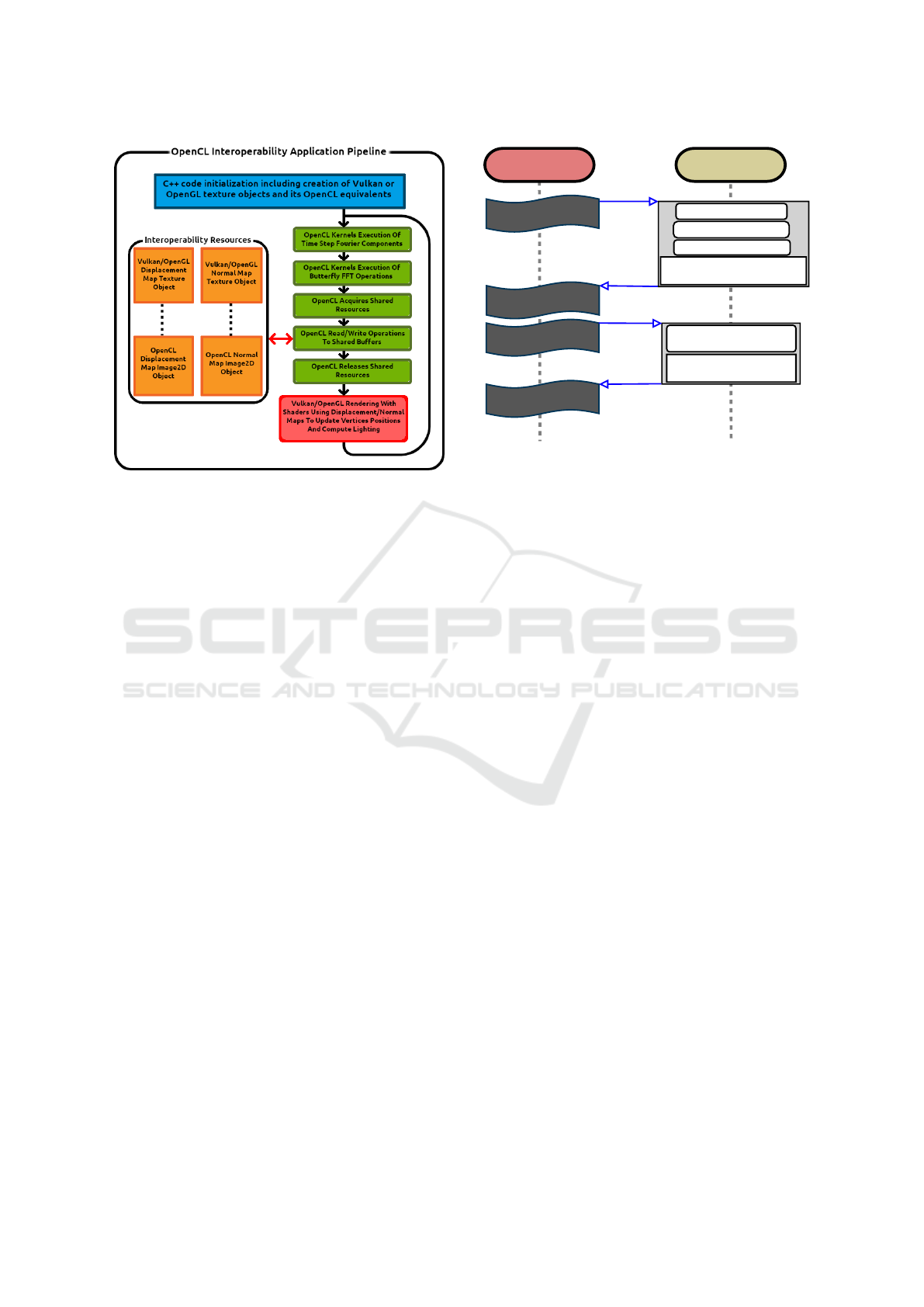
Figure 2: The illustrated diagram depicts the processing
pipeline for the OpenCL interoperability applications be-
ing compared. In both Vulkan and OpenGL implementation
cases, the primary loop of the application can be approxi-
mated using identical steps.
corresponding texture value, and displaces the ver-
tices ”up” or ”down” by the adequate amount.
Next, the vertex shader performs the model-view-
projection (MVP) matrix transformations in order to
align the rendered mesh with the current camera po-
sition and adjust perspective.
Then the fragment shader calculates the lighting
and Fresnel factor for each pixel where the ocean sur-
face is visible. The latter calculation uses a normal
map, which is also generated by the OpenCL kernels.
Other than this we intentionally keep the lighting cal-
culations simple, as visual fidelity is not the focus of
this work.
4.2 Benchmarks
We implemented both benchmarks in C++, utilizing
the CMake build system available in the OpenCL-
SDK repository (Group, 2023).
The OpenGL benchmark is modeled after the
OpenCL interoperability sample available in the
OpenCL-SDK repository. Its base class extends
the cl::sdk::InteropWindow class, which provides
the basic scaffolding for initializing OpenGL and
OpenCL contexts alongside each other. This bench-
mark has a mostly linear flow, with some OpenCL
calculations being performed in parallel to program
execution on the host, but the execution reconverges
as the program waits for the simulation results to be-
come available. The data is then made available to
the OpenGL context and commands for rendering the
OpenCL Kernels
OpenGL Rendering
glFinish
CPU Pipeline GPU Pipeline
clFinish
cl_khr_gl_sharing
UpdateTimeSpectrum
IFFT
InitialSpectrum
Ocean Shaders
Draw Calls
Figure 3: OpenGL benchmark render loop outline. Blue
lines with arrows indicate the host blocking execution until
OpenCL results are available.
next frame are submitted. Figure 3 shows the render
loop execution flow is linear, with various steps exe-
cuted without overlap.
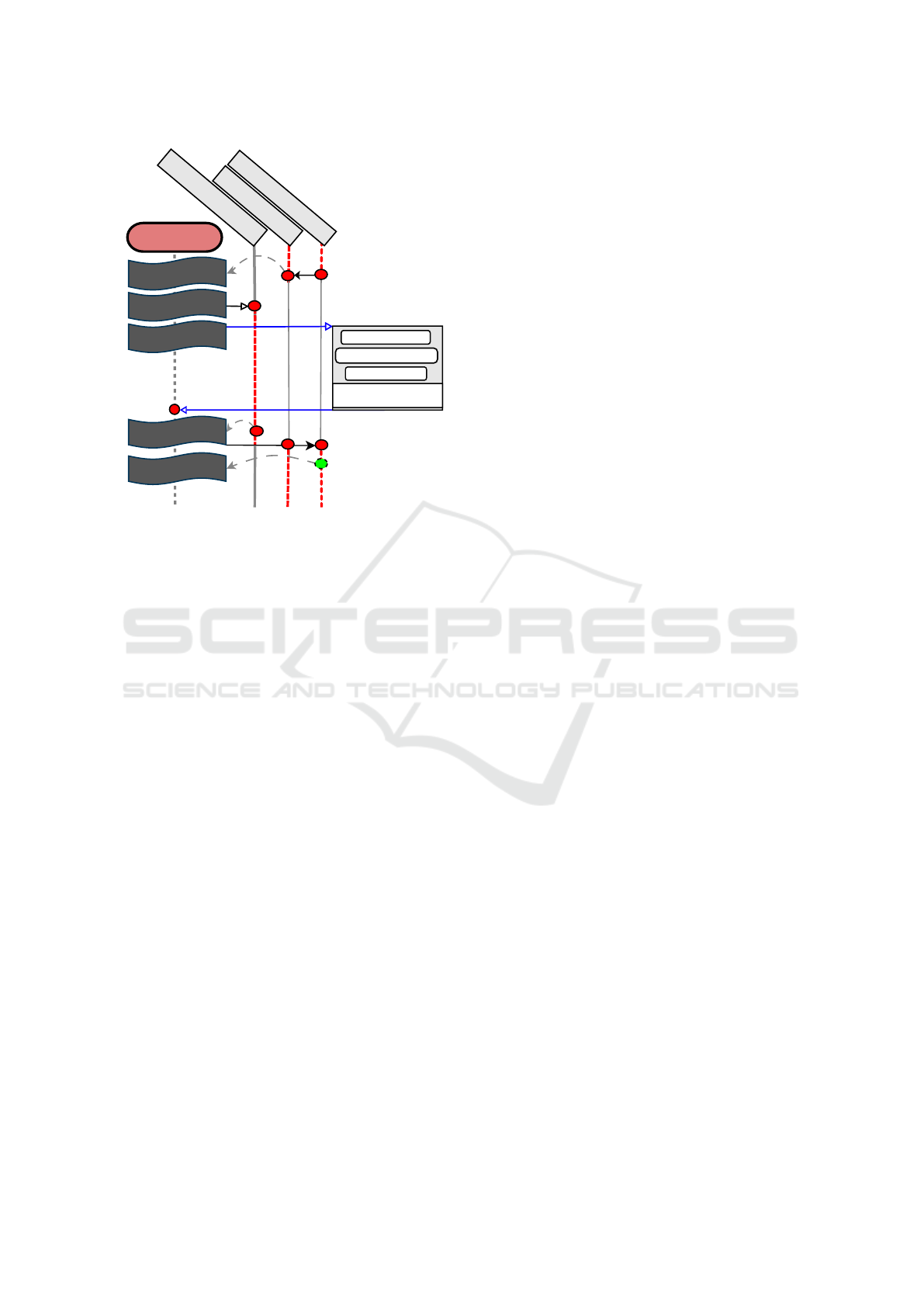
The Vulkan benchmark is based on the code pre-
sented at the end of the Vulkan Tutorial (Overvoorde,
2023). Functionally, it differs in two significant ways
from the OpenGL version:
• In addition to using cl_khr_external_memory,
the Vulkan equivalent of the OpenGL-OpenCL in-
teroperability extension, the benchmark also re-
lies on the cl_khr_external_semaphore exten-
sion to fully synchronize resource sharing.
• While the program is still bound by waiting for
OpenCL calculation results, the rendering work
submitted via the Vulkan API runs in parallel to
the code executed on the host system. This ef-
fectively allows the program to save time by run-
ning OpenCL and Rendering jobs in parallel, as
the rendering of the previous frame usually com-
pletes while we wait for the next frame’s simula-
tion results.
Vulkan API variant of our benchmark is signif-
icantly more verbose, its code size over six times
larger than the OpenGL implementation. As shown in
Figure 4, the program flow is also more complex, with
multiple points where synchronization is necessary to
ensure resources are free before continuing operation.
Both variants have been instrumented with multi-
ple timestamps being recorded during execution.
We use the standard C++ chrono library (cp-
preference.com, 2025) for calculating time, with the
std::chrono::steady_clock clock variant being
used to record high-precision measurements.
Efficiency and Development Effort of OpenCL Interoperability in Vulkan and OpenGL Environments: A Comparative Case Study
115
vkAquireNextImage
vkSubmitQueue
vkQueuePresent
imageAvailableSemaphore
renderFinishedFence
vkWaitForFences
renderFinishedSemaphore
CPU Pipeline
OpenCL Kernels
cl_khr_external_memory
UpdateTimeSpectrum
IFFT
InitialSpectrum
Figure 4: Vulkan benchmark render loop outline. Red
circles and dashed lines indicate synchronization. Blue
lines with arrows indicate the host blocking execution un-
til OpenCL results are available. Gray dashed lines point to
the function waiting for synchronization.
We measured the performance of both benchmark
variants on three NVIDIA GPUs and two operating
systems (Windows and Linux), and repeated the mea-
surements at three levels of rendering workload. In
order to increase the amount of rendering work, we
increased the number of rendered ocean meshes, ren-
dering the same mesh once, 64 times, and 256 times.
The GPUs, computers and drivers they operated
on are:
• NVIDIA Geforce RTX3090 (24 GB VRAM),
AMD Ryzen Threadripper 3970X 32-Core Pro-
cessor, 128 GB DDR4@4000 RAM, Gigabyte
TRX40 AORUS XTREME motherboard, drivers:
v550.144.03 (Linux), v560.94 (Windows),
• NVIDIA Geforce RTX2070 Super (8 GB
VRAM), AMD Ryzen 9 3900 12-Core Proces-
sor, 64 GB DDR4@3600 RAM, MSI X570-A
PRO motherboard, drivers: v545.23.08 (Linux),
v560.94 (Windows), and
• NVIDIA RTX 4070 (12 GB VRAM), AMD
Ryzen 7 5700x 8-Core Processor, 32 GB
DDR4@3200 RAM, Asus Prime B550-Plus
motherboard, drivers: v565.77 (Linux), v566.36
(Windows).
Using different computers for each card prevented
direct comparisons of each card efficiencies, but this
is unlikely to significantly affect the comparison of
the two GPGPU APIs, the study’s primary focus.
AMD Vulkan drivers do not support the
cl_khr_external_memory extension, thus making
interoperability performance the main bottleneck in
the application. For this reason we omitted AMD
cards from our benchmarks.
Before running each benchmark, we set GPUs
fans to run at their maximum speed to increase ther-
mal stability, and ensured no other processes were ac-
tive that might skew the results. The programs were
configured to capture 10,000 frames, generated as fast
as the system was capable, without limiting FPS to
the display capability. The scene was rendered at
1600x800 resolution.
For analysis, execution times for frame numbers
3,000 to 8,000 were taken, which eliminated measure-
ment instability of the initial fast temperature increase
of the GPUs. The frame times in the results were
recorded with 100 ns precision.
5 RESULTS AND DISCUSSION
Our analysis consists of two major directions. First,
we assess the development cost of both graphics APIs,
then we focus on performance measurements to eval-
uate possible benefits related to each of implementa-
tions.
5.1 Development Cost
Both applications, utilizing either Vulkan or OpenGL,
follow identical functional flow paths. This similarity
limits the number of software complexity measures
that can provide a meaningful comparison. For in-
stance, it excludes McCabe’s cyclomatic complexity
(McCabe, 1976) from consideration. Metrics that fo-
cus on the properties of the source code alone appear
to be more suitable for this specific scenario.
The simplest available metric, NLOC (number of
lines of code), quickly reveals the difference between
the two approaches. After isolating only the code per-
tinent to the use of a particular graphics API, OpenGL
code fits in just 261 lines of code, while the distilled
Vulkan API implementation spans 1,711 lines, over
6.5 times more.
Analyzing the program flow also reveals a signifi-
cantly increased complexity for Vulkan. At a glance,
Figures 3 and 4 demonstrate that the Vulkan API is
substantially more complex, featuring multiple syn-
chronization points.
Taken together, these factors make it significantly
more challenging – and thus more costly – to work
on programs implemented using the Vulkan API. Not
only are they harder to reason about, but the software
ICSOFT 2025 - 20th International Conference on Software Technologies
116
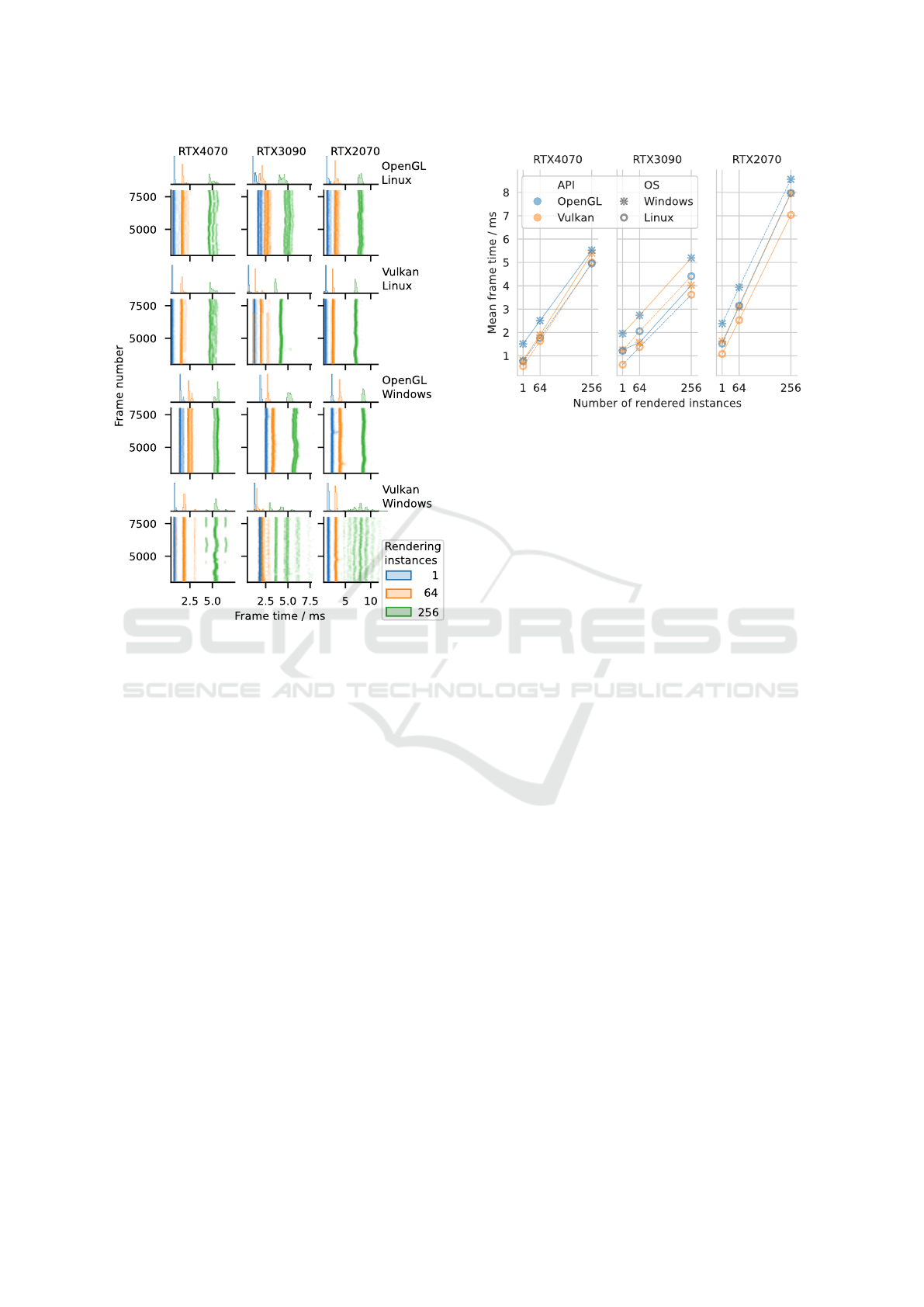
Figure 5: Time traces and histograms for all tested combi-
nations of hardware, OS, and rendering workload.
developer must also gain an understanding of a sub-
stantially larger code base.
5.2 Performance Analysis
We performed our measurements on three GPUs, on
Windows and Linux, for each combination running
the benchmark with three increasingly larger render-
ing workloads. Figure 5 shows time traces and his-
tograms of the measured frame times.
In most of the time traces, there is a visible spread
of the measured values into roughly discrete intervals.
Undoubtedly, the strongest spread can be observed
for the Vulkan Windows frame times, clearly differ-
ing from the Vulkan Linux, which suggest it might be
associated with the differences in Windows and Linux
driver implementation for NVIDIA GPUs.
The effects of GPU temperature fluctuations that
present as continuous small deviations in the traces,
visible especially for 256 rendering instances work-
load, had negligible effect on the calculated mean
frame times as the temperature remained stable dur-
ing the measurement except for the few hundreds ini-
tial warm-up frames not shown in the plot.
The graph shows no obvious increase of the per-
Figure 6: Mean performance of Vulkan vs OpenGL as ren-
dering workload increases.
formance of Vulkan over OpenGL. The Vulkan Win-
dows frame times are spread into roughly discrete in-
tervals. However, both the histograms on top of the
plots, and averaging the samples (Figure 6) reveal the
performance to be similar to that seen on other graphs.
The observed Vulkan execution times are consis-
tently lower across all combinations of hardware, OS
and workloads. The difference appears to be a fixed
amount which we attribute to the overall gain com-
ing from lower API overhead and rendering in parallel
with program execution.
The total rendering time increases linearly with in-
creased rendering workload with frame times being
consistently better on Linux than on Windows, espe-
cially for the Vulkan API.
For small rendering workloads (1 instance)
Vulkan can yield significantly more FPS than
OpenGL, starting at much lower frame times. For
larger workloads, the performance benefit of using
Vulkan becomes relatively smaller, not increasing
significantly from the observed fixed amount, while
frame times increase.
5.3 Vulkan vs OpenGL Performance
The observed performance benefits from using
Vulkan API over OpenGL in a compute-first appli-
cation fail to provide us with any clear answers, con-
firming only that rendering API choice is not obvious.
Even though it may seem that for performance-
sensitive applications Vulkan should be the first
choice, the observed speedups were barely significant
when the rendering workload was increased. Counter-
intuitively, it seems that Vulkan might be a good fit
for relatively simple visualizations, where it allows
the rendering part of the application to keep up with
Efficiency and Development Effort of OpenCL Interoperability in Vulkan and OpenGL Environments: A Comparative Case Study
117

the compute part running in OpenCL, keeping visual-
ization latency very low.
As the rendering workload increased, the rela-
tive speed gain from using Vulkan over OpenGL de-
creased rapidly, making the extra effort required for
using the complex API a questionable choice.
It is worth noting that the case we investi-
gated is not indicative of all potential use-cases for
OpenCL+visualization applications. For example, an
application with a highly complex visualization ren-
dering pipeline might exhibit higher gains from a
Vulkan implementation. On the other hand, such
highly complex cases might benefit from using a 3D
rendering engine instead of interacting with a graph-
ics API directly.
An important consideration is driver support
for needed extensions. We found it surpris-
ing that AMD Vulkan drivers do not support the
cl_khr_external_memory extension.
If very high FPS (over 2,000) is not required and
the application does not need ray tracing or other
unsupported functionalities, OpenGL is definitely a
safer choice, and is likely to work on a wide variety of
hardware and operating systems in the foreseeable fu-
ture. While implementing the visualization in Vulkan
might bring marginal performance gains, those would
likely not be worth the extra development and main-
tenance effort that choice would incur.
5.4 Comparison with Previous Studies
Comparing our results and findings to (Gunadi and
Yugopuspito, 2018) and (Lujan et al., 2019), we see
they fall somewhere between them. (Lujan et al.,
2019) also finds that Vulkan is capable of much higher
FPS at very low loads, far exceeding results observed
in our benchmarks. We attribute this to our use of
OpenCL, which added a small delay to each gener-
ated frame, which became the dominant component
of each cycle as rendering times went down. In (Gu-
nadi and Yugopuspito, 2018) OpenGL is noticeably
faster for some simulation parameters, which is some-
thing we did not observe in our experiments. While
we noted some marginal cases where OpenGL frame
times were faster than those on Vulkan, they were not
significant in our benchmark results. Apart from that,
the results from (Gunadi and Yugopuspito, 2018) are
in agreement with ours, in that Vulkan can be consis-
tently faster than OpenGL, but the difference, while
noticeable, is not very large.
6 CONCLUSIONS
The rise of general-purpose GPU computing has
transformed scientific computing and real-time visu-
alization applications, making the choice of program-
ming interfaces increasingly critical for developers.
While modern GPUs can efficiently handle both com-
putational tasks and graphics rendering, the diver-
sity of available APIs – from vendor-specific to open
standards – presents complex trade-offs in terms of
performance, portability, and development complex-
ity. The growing demand for applications that com-
bine intensive computations with real-time visualiza-
tion has made it particularly important to understand
how different compute and graphics APIs interact and
perform together.
This research investigated the performance impli-
cations of combining OpenCL (a compute API) with
different graphics APIs (Vulkan and OpenGL) in ap-
plications that require both intensive computational
tasks and real-time visualization. The analysis re-
veals that using Vulkan significantly increases devel-
opment complexity and cost, with Vulkan implemen-
tations requiring over six times the lines of code com-
pared to OpenGL and involving more intricate syn-
chronization. Performance measurements show that
Vulkan offers marginal frame time improvements pri-
marily at low rendering workloads, but these benefits
diminish as the workload increases, making the com-
plexity unjustifiable for larger tasks. Furthermore,
Vulkan’s advantages are inconsistent across different
operating systems and hardware, partly due to lim-
ited driver support for certain extensions and gen-
eral immaturity of still developing drivers. Conse-
quently, for most applications where extremely high
frame rates or advanced rendering features are not es-
sential, OpenGL emerges as the more practical and
cost-effective choice.
While our study provides insights into selected ef-
ficiency characteristics and development effort com-
parisons between OpenGL and Vulkan, a comprehen-
sive comparison of these two APIs requires further
research.
We did not investigate the possible extent of op-
timization that is available for Vulkan and OpenGL
applications. We study a fairly straightforward appli-
cation and it may be worth investigating whether our
findings hold true for more optimized programs, both
in terms of potential performance gains, and the effort
required to achieve them.
We also used a fairly straightforward visualization
in our benchmarks. A more complex example may
provide more opportunities for optimization, as well
as present interesting performance bottlenecks related
ICSOFT 2025 - 20th International Conference on Software Technologies
118

to OpenCL-graphics API interoperation.
Finally, the case we presented does not involve
significant data throughputs in the application, an area
where Vulkan’s multi-threaded nature, flexible mem-
ory management options, and elaborate synchroniza-
tion mechanisms might allow it to display significant
performance gains, or rapidly raise code complexity.
This case would also present an interesting opportu-
nity to compare Vulkan’s API-provided mechanisms
to more conventional means which might be neces-
sary to achieve similar results in OpenGL.
ACKNOWLEDGEMENTS
This research was funded by the Institute of Computer
Science of Cardinal Stefan Wyszy
´
nski University in
Warsaw, Poland. We want to express our sincere grat-
itude to the University that has supported our research
efforts.
We sincerely thank Robert Kłopotek, PhD, Eng.
for valuable remarks on the manuscript.
REFERENCES
Acosta, A., Merino, C., and Totz, J. (2018). Analysis of
opencl support for mobile gpus on android. In Pro-
ceedings of the international workshop on openCL,
pages 1–6.
cppreference.com (2025). Date and time utilities. [Aac-
cessed: 2025-02-07].
Dempski, K. (2002). Real-Time Rendering Tricks and Tech-
niques in DirectX. The Premier Press game develop-
ment series. Premier Press, 1 edition.
Dy
´
ndo, D. (2017). Vulkan i opengl – por
´
ownanie wyda-
jno
´
sci na przykładach. Master’s thesis, Uniwersytet
Wrocławski, Wydział Matematyki i Informatyki, In-
stytut Informatyki, Wrocław.
Fl
¨
ugge, F.-J. (2017). Realtime GPGPU FFT ocean wa-
ter simulation. Master’s thesis, Hamburg University
of Technology, Institute of Embedded Systems, Ham-
burg, Germany. Research Project Thesis.
Galvan, A. (2022). A review of shader languages. https:
//alain.xyz/blog/a-review-of-shader-languages. Ac-
cessed: 2025-02-06.
Group, K. (2023). Opencl-sdk. https://github.com/
KhronosGroup/OpenCL-SDK. Accessed: 2025-02-
07.
Gunadi, S. I. and Yugopuspito, P. (2018). Real-time gpu-
based sph fluid simulation using vulkan and opengl
compute shaders. In 2018 4th International Confer-
ence on Science and Technology (ICST), pages 1–6.
IEEE.
Harris, M. J., Coombe, G., Scheuermann, T., and Lastra, A.
(2002). Physically-based visual simulation on graph-
ics hardware. In Graphics Hardware, volume 2002,
pages 1–10.
Harris, M. J. and Gems, G. (2004). Chapter 38: Fast fluid
dynamics simulation on the gpu.
Kapoulkine, A. (2025). Reducing vulkan api
call overhead. https://gpuopen.com/learn/
reducing-vulkan-api-call-overhead/. Accessed:
2025-02-05.
Khronos Group (2023a). Opencl. Accessed: 2025-02-05.
Khronos Group (2023b). Opencl programming model.
GitHub repository. Chapter in OpenCL Guide,
https://github.com/KhronosGroup/OpenCL-Guide/
blob/main/chapters/opencl
programming model.md,
accessed on 2025-02-06.
Khronos Group (2025a). Conformant products.
https://www.khronos.org/conformance/adopters/
conformant-products#opengl. Accessed: 2025-02-06.
Khronos Group (2025b). Multithreading render
passes sample - vulkan samples. https://docs.
vulkan.org/samples/latest/samples/performance/
multithreading render passes/README.html. Ac-
cessed: 2025-02-05.
Khronos Group (2025c). Vulkan essentials - vulkan sam-
ples. https://docs.vulkan.org/samples/latest/samples/
vulkan basics.html. Accessed: 2025-02-05.
Khronos Group (2025d). Vulkan specification: Introduction
chapter. https://docs.vulkan.org/spec/latest/chapters/
introduction.html. Accessed: 2025-02-05.
Kubisch, C., Brown, P., Uralsky, Y., Smith, T., and
Knowles, P. (2019). GL NV mesh shader. NVIDIA.
Lujan, M., Baum, M., Chen, D., and Zong, Z. (2019).
Evaluating the performance and energy efficiency of
opengl and vulkan on a graphics rendering server. In
2019 International Conference on Computing, Net-
working and Communications (ICNC), pages 777–
781. IEEE.
McCabe, T. J. (1976). A complexity measure. IEEE Trans-
actions on software Engineering, (4):308–320.
Micron Technology, Inc. (2022). GDDR6X Infographic.
https://www.micron.com/content/dam/micron/global/
public/infographics/gddr6x-infographic.pdf. Ac-
cessed: 2025-02-05.
NVIDIA Corporation (2025a). Geforce rtx 5090 graphics
card. Accessed: 2025-02-05.
NVIDIA Corporation (2025b). Nvidia cuda zone. https:
//developer.nvidia.com/cuda-zone. Accessed: 2025-
02-05.
Overvoorde, A. (2023). Vulkan tutorial. https://
vulkan-tutorial.com/. Accessed: 2025-02-07.
Peddie, J. (2022). The History of the GPU-Eras and Envi-
ronment. Springer.
Piers, D. (2019). Opengl / opengl es update. https://youtu.
be/1fU4w2ZGxH4?si=c6CnJdIwFO8V5tcE&t=8930.
Presentation at SIGGRAPH 2019. Accessed: 2025-
02-05.
Raja, C., Balasubramanian, S., and Raghavendra, P. (2012).
Heterogeneous highly parallel implementation of ma-
trix exponentiation using gpu. International Journal
of Distributed and Parallel systems, 3.
Efficiency and Development Effort of OpenCL Interoperability in Vulkan and OpenGL Environments: A Comparative Case Study
119
