
Knapsack and Shortest Path Problems Generalizations from a
Quantum-Inspired Tensor Network Perspective
Sergio Mu
˜
niz Subi
˜
nas
1 a
, Jorge Mart
´
ınez Mart
´
ın
1 b
, Alejandro Mata Ali
1 c
, Javier Sedano
1 d
and
´
Angel Miguel Garc
´
ıa-Vico
2 e
1
Instituto Tecnol
´
ogico de Castilla y Le
´
on, Burgos, Spain
2
Andalusian Research Institute in Data Science and Computational Intelligence (DaSCI), University of Ja
´
en,
23071 Ja
´
en, Spain
Keywords:
Quantum Computing, Tensor Networks, Combinatorial Optimization, Quantum-Inspired.
Abstract:
In this paper, we present two tensor network quantum-inspired algorithms to solve the knapsack and the short-
est path problems, and enables to solve some of its variations. These methods provide an exact equation which
returns the optimal solution of the problems. As in other tensor network algorithms for combinatorial opti-
mization problems, the method is based on imaginary time evolution and the implementation of restrictions
in the tensor network. In addition, we introduce the use of symmetries and the reutilization of intermediate
calculations, reducing the computational complexity for both problems. To show the efficiency of our imple-
mentations, we carry out some performance experiments and compare the results with those obtained by other
classical algorithms.
1 INTRODUCTION
Combinatorial optimization has become a wide field
of study due to the large number of industrial and
academic applications in different disciplines, for
instance, engineering or logistics. Some of the
most prominent and extensively studied problems are
route optimization (traveling salesman problem (La-
porte, 1992; Korte and Vygen, 2008) or the short-
est path (Dijkstra, 1959; Hart et al., 1968)), task
scheduling (job-shop scheduling problem (Lenstra,
1992; Dauz
`
ere-P
´
er
`
es et al., 2024)) and constrained
optimization (knapsack (Mathews, 1896; Bateni et al.,
2018) or bin packing (Korte and Vygen, 2000; Egor
et al., 2022)). The fact that most of these problems
are NP-hard makes exact resolution methods compu-
tationally unaffordable. With the objective of solv-
ing these problems, it is common to draw upon ap-
proximations, generally obtaining a suboptimal re-
sult. However, in many industrial cases, the focus
is on finding a solution that works well enough in a
a
https://orcid.org/0009-0008-7590-0149
b
https://orcid.org/0009-0004-9336-3165
c
https://orcid.org/0009-0006-7289-8827
d
https://orcid.org/0000-0002-4191-8438
e
https://orcid.org/0000-0003-1583-2128
reasonable time, rather than looking for the best pos-
sible outcome. Some of the most used classical ap-
proximation techniques are greedy approaches (Gutin
and Yeo, 2007), reinforcement learning (Wang and
Dong, 2024), genetic algorithms (Pilcher, 2023) or
simulated annealing (Katangur et al., 2002).
Meanwhile, due to the development of quantum
technologies, new ways of approaching combinatorial
optimization problems have been proposed. Among
other applications, it is possible to address the solu-
tion for quadratic unconstrained binary optimization
(QUBO) (Glover et al., 2019) problems with quan-
tum algorithms such as the quantum approximate op-
timization algorithm (QAOA) (Farhi et al., 2014) or
the variational quantum eigensolver (VQE) (Peruzzo
et al., 2014). Likewise, Constrained Quadratic Mod-
els (CQM) and Binary Quadratic Models (BQM) can
be solved with quantum annealers (Benson et al.,
2023). With the current status of quantum com-
puters hardware, where qubits are noisy and unreli-
able, no improvement in the state-of-the-art has been
achieved. Nevertheless, due to the strong theoret-
ical basis of these algorithms, researchers have de-
veloped quantum-inspired strategies, with tensor net-
works (TN) emerging as one of the most populars (Bi-
amonte and Bergholm, 2017; Biamonte, 2020). This
discipline consists in taking advantage of some prop-
Subiñas, S. M., Martín, J. M., Ali, A. M., Sedano, J., García-Vico and Á. M.
Knapsack and Shortest Path Problems Generalizations from a Quantum-Inspired Tensor Network Perspective.
DOI: 10.5220/0013489000004525
In Proceedings of the 1st International Conference on Quantum Software (IQSOFT 2025), pages 81-88
ISBN: 978-989-758-761-0
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
81

erties of tensor algebra to compress information or
perform calculations in a more efficient way. More-
over, by applying tensor decomposition operations
such as singular value decomposition (SVD) (Golub
and Kahan, 1965) in a truncated way, it is possible to
make approximations losing the least relevant infor-
mation. Numerous studies show the computational
advantages of tensor networks in a wide variety of
applications, for instance, in the simulation of quan-
tum systems (Biamonte, 2020), compression of neu-
ronal networks (Qing et al., 2024), anomaly detec-
tion (Wang et al., 2020; Ali et al., 2024a) or com-
binatorial optimization problems (Hao et al., 2022),
which are the object of study of this paper.
In this paper, we present two tensor network algo-
rithms to solve the knapsack and shortest path prob-
lems. Our method is based on previous works applied
to traveling salesman problem (Ali et al., 2024b),
QUBO problems (Ali et al., 2024d) and task schedul-
ing (Ali et al., 2024c). The objective of this study is
to present an analytical methodology for solving com-
binatorial optimization problems, rather than a com-
putational advantage in such problems. Following
the results in (Ali, 2025), it provides an exact equa-
tion that returns the optimal solution to these prob-
lems. We compare the results of our implementations
against some classical algorithms.
2 KNAPSACK PROBLEM
Given a set of n different item classes, where the i-
th class can be selected up to c
i
times, each with
an associated weight w
i
∈ N and value v
i
∈ R
+
, the
knapsack problem consists in finding the configura-
tion ⃗x = (x
0
,..,x
n−1
) that maximizes
V (⃗x) =
n−1
∑
i=0
x
i
v
i
subject to W (⃗x) =
n−1
∑
i=0
x
i
w
i
≤ Q,
x
i
∈ [0,c
i
] ∀i ∈ [0,n − 1],
(1)
being x
i
the number of times the i-th class has been
selected, V (⃗x) the total value of the items, W (⃗x) the
total weight of the items in the knapsack and Q the
maximum weight capacity. There are different vari-
ants of this problem, the most popular being the 0-1
knapsack, where each class can be selected only once,
x
i
∈ {0,1}. These instances variants can be solved
exactly with a time complexity of O(nQ) and space
complexity O(nQ).
2.1 Tensor Network Algorithm
The idea of our algorithm is to take advantage of the
imaginary time evolution to generate a state whose
basis state with the greatest amplitude represents the
optimal configuration. Due to the high number of
possible combinations, we cannot know the ampli-
tude of all combinations at once, and hence determine
the highest probability state. Therefore, we employ
a method that consists in determining each variable
separately, by projecting the state into each subspace
associated with the respective variable.
2.1.1 Quantum-Inspired Tensor Network
Our knapsack problem algorithm is based on ten-
sor algebra and some properties of quantum comput-
ing such as superposition or projected measurements.
Thus, we have developed a quantum-inspired tensor
network that incorporates the theoretical advantages
of quantum computing without being limited by its
constraints. The tensor network (see Fig. 2 a) can be
interpreted as a ‘quantum circuit’ that can be simu-
lated in four steps, each one corresponding to one of
the layers in the figure.
The system starts in a uniform superposition of n
variables, each one encoded in the basis states of a
qudit of dimension c
i
+ 1. This first step corresponds
to the first layer of tensors ‘+’ in Fig. 2 a, and the
mathematical representation of the resulting state is
|ψ
0
⟩ =
∑
⃗x
|⃗x⟩ =
n−1
O
i=0
c
i
∑
x
i
=0
|x
i
⟩. (2)
The next step consists of applying an imaginary time
evolution layer to the superposition that amplifies the
basis states with a higher value. We implement this
with an operator S , which assigns to each state |⃗x⟩ an
exponential amplitude corresponding to its associated
value V (⃗x). The parameter τ scales the costs so that
the amplitudes differ exponentially from each other.
The state after applying this layer is
|ψ
1
⟩ =S|ψ
0
⟩ =
∑
⃗x
e
τV (⃗x)
|⃗x⟩. (3)
In order to eliminate incompatible configurations, we
apply a third layer that imposes the maximum capac-
ity constraint,
|ψ
2
⟩ = R (Q)|ψ
1
⟩ =
∑
⃗x
e
τV (⃗x)
R (Q)|⃗x⟩
R (Q)|⃗x⟩ = |⃗x⟩ if W (⃗x) ≤ Q,
(4)
where R (Q) is the operator that projects the state into
the subspace that fulfills the maximum weight capac-
ity Q. This is implemented by a layer of R
i
tensors,
IQSOFT 2025 - 1st International Conference on Quantum Software
82
where the up index keeps track of the current weight
loaded at the knapsack until that qudit, while the down
index outputs the resultant weight after adding the
new qudit state. If this weight exceeds Q, the am-
plitude of the state is multiplied by zero.
Once obtained a system that has performed the
minimization and constraint, we need a method to ex-
tract the position of the largest element of the super-
position without checking all the possible combina-
tions. To do this, we have to take into account that,
for a sufficiently large τ, there will be a very high am-
plitude peak in the state of the optimal solution. In
order to achieve this, we apply a partial trace layer
to the tensor network except for the first qudit. This
leads to the state
|ψ
0
3
⟩ =
∑
⃗z
⟨z
1
,...,z
n−1
|ψ
2
⟩ =
∑
⃗x|W (⃗x)≤Q
e
τV (⃗x)
|x
0
⟩.
(5)
It can be interpreted as the resulting state from pro-
jecting |ψ
2
⟩ into the Hilbert space H
c
0
+1
of the first
qudit and it is equivalent as the quantum process of
measuring the first qubit. The associated vector rep-
resentation is:
|ψ
0
3
⟩ =
⟨0 + · · · + |ψ
2
⟩
⟨1 + · · · + |ψ
2
⟩
.
.
.
⟨c
0
+ ··· + |ψ
2
⟩
, (6)
where each amplitude allows to determine the prob-
ability of |ψ
0
3
⟩ of being in their corresponding basis
states |x
0
⟩.
To determine the first variable x
0
, we contract the
tensor network (see Fig. 2 a) to obtain |ψ
0
3
⟩, whose
highest amplitude value position corresponds to the
optimum value of the variable x
0
. To compute the
remaining variables, we use the same tensor network
but, instead of leaving free the index associated to the
first variable, we free the index we want to obtain and
follow the same contraction process as in the previous
step. With this, we obtain the |ψ
m
3
⟩ state, from which
we determine the m-th variable. In each step, at the
end of the line of the variables that we have already
determined, we put a vector where all its elements are
zero, except the element corresponding to the chosen
value of the variable. This process is shown in Fig. 1.
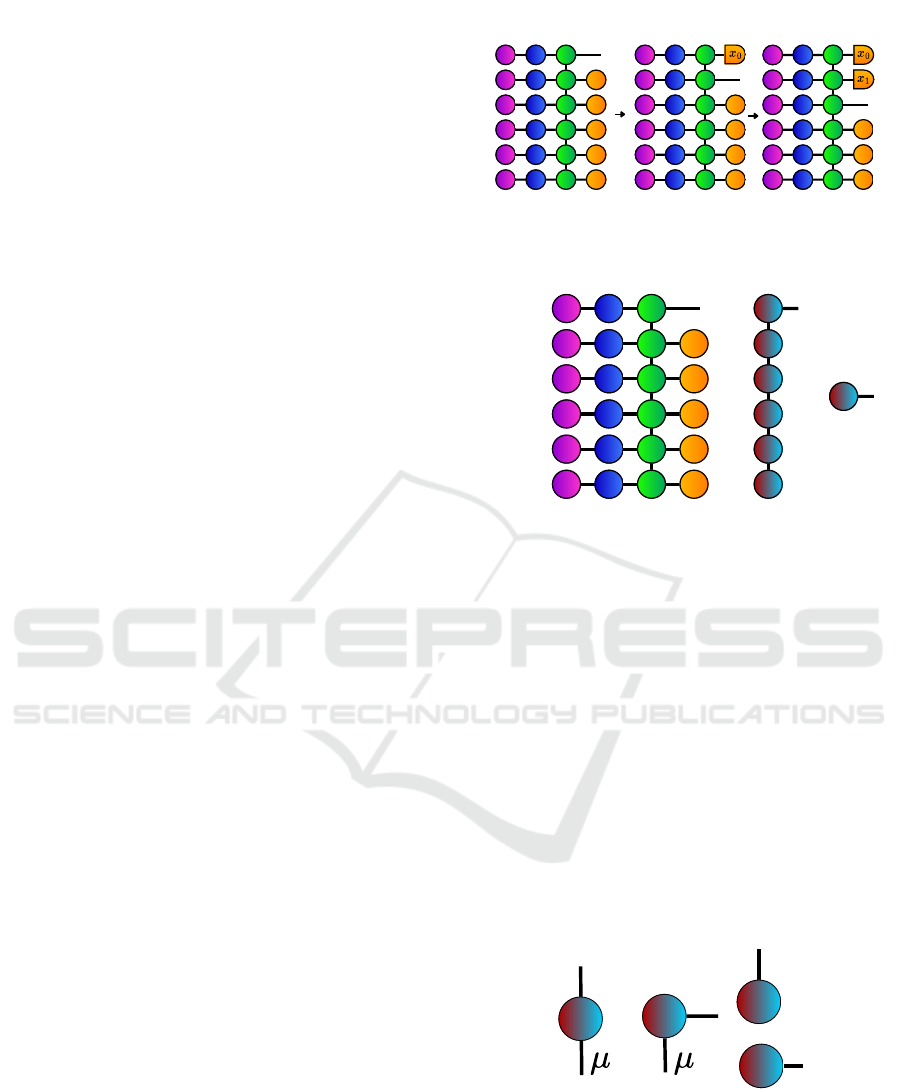
2.1.2 Tensor Network Layout
Since it is possible to compress the information of the
four layers into a single layer in a convenient way, we
propose a direct implementation of the tensor network
in a chain structure (see Fig. 2). We define the tensors
following the index convention of Fig. 3.
a) b) c)
+
+
+
+
+
+
S⁰
S¹
S²
S³
S⁴
S⁵
R¹
R²
R³
R⁴
R⁵
+
+
+
+
+
+
+
+
+
+
+
S⁰
S¹
S²
S³
S⁴
S⁵
R⁰
R¹
R²
R³
R⁴
R⁵
+
+
+
+
+
+
+
+
+
+
S⁰
S¹
S²
S³
S⁴
S⁵
R⁰
R¹
R²
R³
R⁴
R⁵
+
+
+
Figure 1: Graphic representation of the iterative method of
the tensor network to obtain each variable.
+
+
+
+
+
+
S⁰
S¹
S²
S³
S⁴
S⁵
R⁰
R¹
R²
R³
R⁴
R⁵
+
+
+
+
+
M⁰
K¹
K²
K³
K⁴
K⁵
=
x₀
x₁
x₂
x₃
x₄
x₅
=
P⁰
a) b)
c)
Figure 2: Tensor network solving the knapsack problem. a)
Tensor network solving the knapsack problem composed of
four column layers. From left to right: superposition (‘+’),
evolution (S), constraint (R) and tracing (‘+’). b) Com-
pressed version into a linear TN that implements all four
layers simultaneously. c) Contracted tensor.
From the figure, we can see that there are three
different types of tensors. The tensor M
0
, with ele-
ments M
0
iµ
, is associated with the first qudit we want
to measure. This tensor is the result of the contrac-
tion between the superposition node ‘+’, the evolu-
tion node S
0
and the projector node R
0
. It outputs in-
formation about the state of the qudit throughout the
index i, and outputs the weight of the knapsack after
adding the new items throughout the index µ. There-
fore, the dimensions of the indexes i and µ are c
′
0
and
Q
′
respectively, being Q
′
= Q + 1 and c
′
i
= c
i
+ 1 to
streamline the notation. The non-zero elements of the
i
i
i
i
a)
b) c)
d)
Figure 3: Nomenclature of the indexes of each tensor from
the tensor chain, where i corresponds to a variable index and
µ to a dependent index. a) A tensor from the middle of the
tensor chain. b) The top tensor of the tensor chain. c) The
bottom tensor of the tensor chain. d) The resulting tensor
from the contraction of the tensor chain.
Knapsack and Shortest Path Problems Generalizations from a Quantum-Inspired Tensor Network Perspective
83

matrix M
0
c
′
0
×Q
′
are defined as
µ = iw
0
, M
0
iµ
= e
τiv
0
. (7)
The following n − 2 tensors K
k
belong to the same
type, they have elements K
k
iµ
and are associated with
the k-th qudit. Each of these tensors receives infor-
mation about the weight of the knapsack until the
previous qudit throughout the index i, and passes the
weight of the knapsack, including the weight added
by this qudit, throughout the index µ. Therefore, the
dimensions of the indexes i and µ are both Q
′
. The
non-zero elements of K
k
Q
′
×Q
′
are defined as
y
k
∈ [0,c
k
], µ = i + y
k
w
k
, K
k
iµ
= e
τy
k
v
k
,
(8)
where y
k
is the number of times we introduce the k-th
element into the knapsack. This considers all possible
additions of elements of that class that do not exceed
the maximum weight.
Finally, the last tensor K
n−1
, with elements K
n−1
i
,
is associated with the last qudit and receives from i
the information of the knapsack of all the other qudits.
The non-zero elements of K
n−1
Q
′
are
y
i
= min
Q − i
w
n−1
,c
n−1
, K
n−1
i
= e
τy
i
v
n−1
, (9)
being y
i
the maximum amount of elements of the class
n − 1 that could be added without exceeding the max-
imum weight capacity Q. Since in the event that one
can have up to y
i
positive value elements, the most
optimal is always to have the maximum number.
It is important to note that by cutting the chain as
the values of the variables are being set, the upper ten-
sor of the chain will be different in each iteration, as
it must include the information from the results ob-
tained in the previous steps. Thus, during the itera-
tion where the variable x
m
is determined, our tensor
network consists of the same n − m − 1 last tensors
and a new upper tensor M
m
c
′
m
×Q
′
µ = iw
m
+
m−1
∑
k=0
x
k
w
k
, M
m
iµ
= e
τiv
m
.
(10)
2.2 Contraction Scheme
In order to optimize the use of computational re-
sources, we develop a contraction scheme that takes
advantage of intermediate calculations. The idea is to
store the resulting vectors from each step of the con-
traction process, while contracting the tensor chain
bottom-up. This way, for each iteration of the algo-
rithm, we only need to contract the new initial tensor
with the corresponding stored intermediate tensor.
M⁰
K¹
K²
K³
K⁴
K⁵
M⁰
K¹
K²
K³
B⁴
M⁰
K¹
K²
B³
M⁰
K¹
B²
M⁰
B¹
Mᵐ
Bᵐ⁺¹
= =
= =
P⁰
=
Pᵐ
=
a)
b)
Figure 4: Contraction scheme with storage of intermediate
tensors for later calculations.
The implementation of this recursive method can
be seen in Fig. 4. In this process, the last node of
the chain is contracted with the node directly above,
resulting in a new node B
k
, which will be stored in
memory for later operations. We have to repeat this
process until we have a single node P
0
which repre-
sents the |ψ
0
3
⟩ state. Once all the tensors are stored,
we only need to contract the M
m
matrices with their
corresponding B
m+1
tensor to obtain |ψ
m
3
⟩, contract-
ing the whole tensor network of each iteration in one
step.
2.3 Optimizations and Computational
Complexity
As we have mentioned earlier, the tensor network al-
gorithm that we implement needs to store about n
Q × Q matrices. Therefore, to carry out the proposed
contraction scheme, we need to store the result of n
matrix-vector operations, in addition to performing
each contraction between M
m
and B
m+1
.
Since each vector-matrix contraction has com-
plexity O(Q
2
), the computational cost of the first step
is O(nQ
2
), which is not optimal considering the struc-
ture of the matrices. It is possible to verify that the
tensors K
k
present sparsity; in particular, the number
of nonzero elements in these matrices depends on c
k
.
All elements of K
k
are zero except for c
k
+ 1 diago-
nals, each one starts in column c
i
k
w
k
where c
i
k
∈ [0,c
k
]
and all its elements are equal to e
c
i
k
τv
k
. Therefore, the
number of non-zero elements is O(Qc
k
).
Keeping this in mind and knowing that the com-
putational complexity of multiplying a dense vector
with a sparse matrix is O(n
z
), where n
z
is the number
of non-zero elements, the computational complexity
of this step is O(nQc), with c being the average c
k
.
As the second step also involves the multiplication of
a sparse matrix and a dense vector, the computational
complexity is likewise of the order O(nQc). Thus,
the total time complexity of the algorithm is O(nQc),
which is O(nQ) in the 0-1 case.
IQSOFT 2025 - 1st International Conference on Quantum Software
84

For space complexity we have to take into account
that each intermediate vector stored has O(Q) ele-
ments. The matrices can be generated dynamically
while contracting, so they require only O(c) elements
each, which is negligible compared to O(Q). The to-
tal space complexity is O(nQ).
In the case where intermediate calculations are
not used, the contraction process must be carried out
each time a variable is to be determined. This ap-
proach does not have the problem of storing n vec-
tors of dimension Q, being the space complexity
O(Q). However, the computational complexity be-
comes O(n
2
Qc).
3 SHORTEST PATH PROBLEM
Given a graph G with V ∈ N vertices and a set E
of edges, the shortest path problem, also called the
single-pair shortest path problem, consist in finding a
n-step path between two vertices
⃗v = (v
0
,v
1
,...,v
n−1
), v
t
∈ [0,V],
(11)
such us the cost of the route is minimized, where v
t
is
the vertex associated to the t-th step. The cost of the
route is given by
C(⃗v) =
n−2
∑
t=0
E
v
t
,v
t+1
,
(12)
where E
i j
∈ R
+
corresponds to the cost between the
i-th vertex and j-th vertex. If two vertices are not con-
nected, the cost between them is E
i j
= ∞, and the cost
between a node and itself is E
ii
= 0.
The single-pair directional shortest path can be
solved with a time complexity of O((E + V )log(V ))
and a space complexity O(V ) (Fredman and Tarjan,
1987).
3.1 Tensor Network Algorithm
The algorithm we propose in this paper is based on
the tensor network in Fig. 5 a, relaying on the same
principles explained in Ssec. 2.1.
3.1.1 Quantum-Inspired Tensor Network
The tensor network starts with a superposition layer
equivalent to the state in Eq. 2. In this superposi-
tion, we apply an imaginary time evolution layer that
damps the basis states with higher-cost routes. The
state after applying this layer is
|ψ
1
⟩ =
∑
⃗v
e
−τC(⃗v)
|⃗v⟩ =
n−2
O
t=0
V −1
∑
v
t
=0
e
−τEv
t
,v
t+1
|v
t
⟩. (13)
O
L¹
K²
K³
K⁴
D
=
P¹
a)
b) c)
S⁰
S¹
S²
S³
S⁴
S⁵
v₀
v₁
v₂
v₃
v₄
v₅
+
+
+
+
+
+
+
+
+
=
M¹
K²
K³
N⁴
=
d)
Figure 5: Tensor network solving the shortest path problem.
a) Tensor network solving the shortest path problem com-
posed of three column layers. From left to right: superpo-
sition (‘+’), evolution (S) and tracing (‘+’). b) Compressed
version into a linear TN that implements all three layers si-
multaneously. c) Compressed version with the fixed nodes
removed. d) Contracted tensor.
The last layer consists of a partial trace layer in
each qudit except the second. For the first and last
nodes, it is necessary to connect them to a node that
represents the origin and destination nodes respec-
tively, instead of the superposition node. This leads
to the state
|ψ
1
2
⟩ =
∑
⃗z
⟨v
o
,z
2
,...,v
d
|ψ
1
⟩ =
∑
⃗v
e
−τC(⃗v)
|v
1
⟩, (14)
where v
o
corresponds to the origin node and v
d
to the
destiny node.
3.1.2 Tensor Network Layout
As in the case of the knapsack, we propose a com-
pressed formulation of the tensor network in a chain
structure (see Fig. 5).
From the figure, we can see that there are three dif-
ferent types of tensors. The tensor L
1
, with elements
L
1
i jk
, is associated with the qudit we want to measure.
Given that the origin node is fixed, we remove it by
manually adding the information to the next node re-
sulting in the node M
1
i j
. This tensor is the result of the
contraction between the superposition node ‘+’, the
evolution node S
1
and the trace node. It outputs in-
formation about the state of the qudit throughout the
index i, and outputs the selected node throughout the
index j. Therefore, the dimensions of the indexes i
and j are both V . The matrix M
1
V ×V
is defined as
M
1
i j
= e
−τ(E
oi
+E
i j
)
. (15)
The following n − 3 tensors belong to the same
type, the tensor K
k
V ×V
which has elements K
k
i j
is as-
sociated with the k-th qudit. It receives information
about the previous visited node throughout the index
i, and passes the new visited node throughout the in-
dex j. Therefore, the dimension of the indexes i and
Knapsack and Shortest Path Problems Generalizations from a Quantum-Inspired Tensor Network Perspective
85
j is V for both of them. K
k
V ×V
is defined as
K
k
i j
= e
−τE
i j
. (16)
Finally, the last non-fixed tensor K
n−2
i j
is associ-
ated with the second, since the last node corresponds
to the destiny node. It receives from i the information
of the previous node and, by fixing the last node to the
destiny, we add the cost of the edge between the sec-
ond last and the last node removing the index j . This
result in the node N
n−2
V
with the non-zero elements
being
N
n−2
i
=
V −1
∑
j=0
e
−τ(E
i j
+E
jd
)
. (17)
It is important to note that by cutting the chain as
the values of the variables are being set, the upper ten-
sor of the chain will be different in each iteration as
it must include the information from the results ob-
tained in the previous steps. Thus, during the itera-
tion where the variable v
m
is determined, our tensor
network consists of the same n − m − 1 last tensors
and a new upper tensor M
m
i j
M
m
i j
= e
−τ(E
pi
+E
i j
)
,
(18)
where p corresponds to the previous visited node.
This tensor network follows the same contraction
scheme as explained in Ssec. 2.2.
3.2 Optimizations and Computational
Complexity
As mentioned before, the tensor network algorithm
that we implement needs to store about n V ×V matri-
ces. Therefore, to carry out the proposed contraction
scheme, we need to store the result of n matrix-vector
operations, in addition to performing the contractions
between M
m
and B
m+1
. As each vector-matrix con-
traction has complexity O(E), the computational cost
of the first step is O(nE). Each following step has a
complexity of O(E), so that the total complexity is
O(nE).
Given that the n tensors are equal except for the
last, we only need to store one copy of the connec-
tivity matrix to perform all operations. Although we
need to store the result of the vector-matrix contrac-
tions, it can be stored with a complexity of O(V
2
) or,
considering that each non zero element corresponds
to an edge, it can also be defined as O(E).
With the reuse of intermediate steps we only need
to store n vectors of dimension V , so the total space
complexity is O(nV + E).
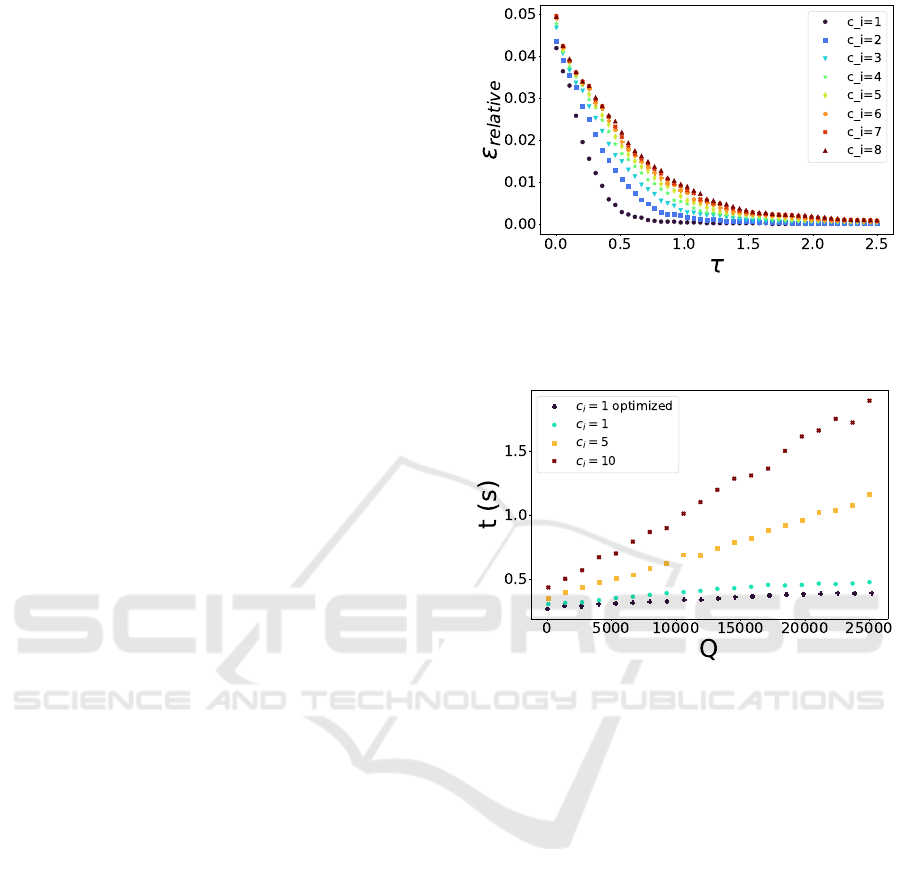
Figure 6: Knapsack problem: Relative error ε
relative
= 1 −
V (⃗x
tn
)/V (⃗x
gr
) depending on τ and c
i
. Each problem has
1000 classes and a capacity of 0.8
∑
n−1
i=0
c
i
w
i
.
Figure 7: Knapsack problem: Dependency between the ca-
pacity of the knapsack Q and the execution time for dif-
ferent problem instances. Use of intermediate calculations,
number of classes n = 5000, τ = 1.
4 RESULTS AND
COMPARATIVES
After explaining the theoretical framework of the al-
gorithms, we present a series of experiments to com-
pare our approaches with other classical algorithms.
We evaluate both, the quality of the solutions versus τ
and the execution time versus the size of the problem.
4.1 Knapsack Results
The original idea was to compare our algorithm with
the Google Or-tools solver. However, due to its lim-
itation of requiring v
i
to be integer and its signifi-
cantly lower maximum weight capacity Q, we have
excluded this option. Therefore, the algorithm used
for the comparisons is a greedy approach, which is
capable of finding a good approximate solution in al-
most no time for every problem instance. Basically,
IQSOFT 2025 - 1st International Conference on Quantum Software
86
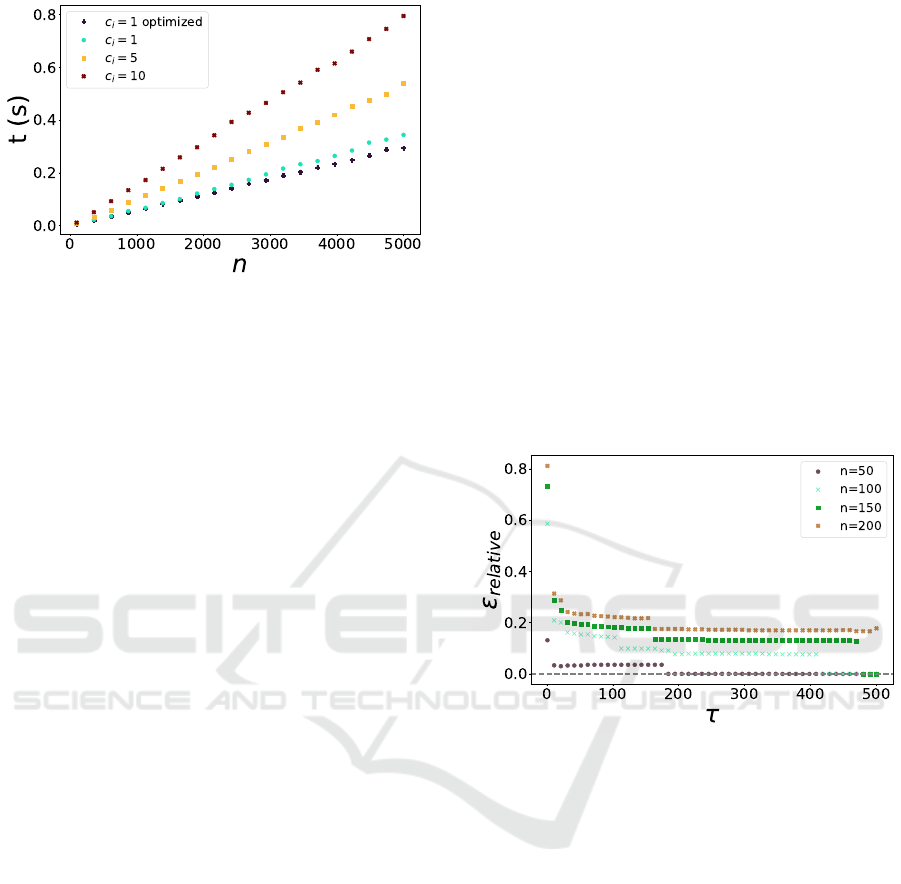
Figure 8: Knapsack problem: Dependency between the
number of classes n and the execution time for different
problem instances. Use of intermediate calculations, maxi-
mum weight capacity Q = 7000, τ = 1.
it consists of arranging the items in the knapsack in
ascending order according to the value/weight ratio,
and then inserting objects until the knapsack is filled
to the maximum. Fig. 6 displays how the algorithm
performs as a function of τ and the number of ele-
ments in all classes (in this case, all classes have the
same number of elements). Our indicator is the rel-
ative error ε
relative
= 1 −V (⃗x
tn
)/V (⃗x
gr
), being V(⃗x
tn
)
the value of the tensor network solution and V (⃗x
gr
)
the value of the greedy solution. As expected, as τ
increases, the relative error ε
relative
decreases, causing
the solution to approximate the greedy approach.
It should be noted that when τ reaches a certain
value, the product of the exponential may result in an
overflow, causing the algorithm to produce subopti-
mal solutions. This implies that, although this algo-
rithm is theoretically an exact method, in practice it is
not possible to solve arbitrarily large problems. When
exponential saturation is reached, the algorithm be-
gins to perform worse and, for this reason, it is crucial
to select a value τ that is large enough to distinguish
the optimal solution while remaining small enough to
prevent saturation.
Additionally, as mentioned in the theoretical sec-
tion, it is possible to verify in Figs. 7 and 8 that
by taking advantage of intermediate calculations, the
computational complexity in time of the algorithm de-
pends linearly with the maximum weight capacity Q
and the number of classes n. To avoid overflow, it
is possible to achieve better results using the Deci-
mal library. In fact, for problems with up to 1000
classes, our algorithm is able to find better solutions
than greedy in several problem instances.
4.2 Shortest Path Problem
In order to compare how our algorithm performs
against Dijkstra’s (Dijkstra, 1959), we propose an
experiment where both algorithms have to go from
the same origin node to the same destiny node within
the same graph. This graph corresponds to Valladolid
city (Spain). Given that our algorithm needs to have
a fixed number of steps in order to work, we compare
how the results evolve according to τ and the number
of steps. As can be seen in Fig. 9, both the number
of steps and the value of τ influence the result. The
higher the number of total steps, the greater τ needs to
be in order to reach the optimal solution. Our indica-
tor is the relative error ε
relative
= C(⃗x
tn
)/C(⃗x
exact
)− 1,
being C(⃗x
tn
) the value given by the tensor network
and C(⃗x
exact
) the number given by Dijkstra’s algo-
rithm. The relative error ε
relative
decreases as τ in-
creases, bringing the solution closer to the optimal.
Figure 9: Shortest path problem: Relative error ε
relative
=
C(⃗x
tn
)/C(⃗x
exact
) − 1 depending on τ and n. Each problem
has V = 12408.
5 CONCLUSIONS
This work introduces a quantum-inspired tensor net-
work approach to solving the knapsack and the short-
est path problems. The methodology is based on some
quantum computing properties, such as superposition,
entanglement, or quantum measurements. Theoreti-
cally, the proposed algorithms allow to determine the
solutions of the problems exactly. However, due to
the overflow caused by the implementation, the effi-
ciency of the algorithm is limited by the parameter τ
value. Even taking this into account, we have shown
that our algorithms are able to find optimal solutions
for several problem instances (Figs. 7 and 8).
Future research will focus on analyzing the impact
of the parameter τ more systematically and develop-
ing alternative implementations that avoid numerical
Knapsack and Shortest Path Problems Generalizations from a Quantum-Inspired Tensor Network Perspective
87

overflows before reaching the optimal solution. Addi-
tionally, we aim to extend this approach to other com-
binatorial optimization problems, broadening the ap-
plicability of quantum-inspired tensor network meth-
ods in this domain, and study its possible implementa-
tion in quantum hardware to improve its performance.
ACKNOWLEDGMENT
The research has been funded by the Ministry of
Science and Innovation and CDTI under ECOSIS-
TEMAS DE INNOVACI
´
ON project ECO-20241017
(EIFEDE) and ICECyL (Junta de Castilla y Le
´
on) un-
der project CCTT5/23/BU/0002 (QUANTUMCRIP).
This proyect has been funded by the Spanish Min-
istry of Science, Innovation and Universities under
the project PID2023-149511OB-I00.
REFERENCES
Ali, A. M. (2025). Explicit solution equation for every com-
binatorial problem via tensor networks: Melocoton.
Ali, A. M., de Leceta, A. M. F., and Rubio, J. L. (2024a).
Anomaly detection from a tensor train perspective.
Ali, A. M., Delgado, I. P., and de Leceta, A. M. F. (2024b).
Traveling salesman problem from a tensor networks
perspective.
Ali, A. M., Delgado, I. P., Markaida, B. G., and de Leceta,
A. M. F. (2024c). Task scheduling optimization from
a tensor network perspective.
Ali, A. M., Delgado, I. P., Roura, M. R., and de Leceta, A.
M. F. (2024d). Polynomial-time solver of tridiagonal
qubo and qudo problems with tensor networks.
Bateni, M., Hajiaghayi, M., Seddighin, S., and Stein, C.
(2018). Fast algorithms for knapsack via convolution
and prediction. In Proceedings of the 50th Annual
ACM SIGACT Symposium on Theory of Computing,
STOC 2018, page 1269–1282, New York, NY, USA.
Association for Computing Machinery.
Benson, B. M., Ingman, V. M., Agarwal, A., and Keinan, S.
(2023). A cqm-based approach to solving a combina-
torial problem with applications in drug design.
Biamonte, J. (2020). Lectures on quantum tensor networks.
Biamonte, J. and Bergholm, V. (2017). Tensor networks in
a nutshell.
Dauz
`
ere-P
´
er
`
es, S., Ding, J., Shen, L., and Tamssaouet, K.
(2024). The flexible job shop scheduling problem: A
review. European Journal of Operational Research,
314(2):409–432.
Dijkstra, E. W. (1959). A note on two problems in connex-
ion with graphs. Numerische Mathematik, 1(1):269–
271.
Egor, B., Egor, G., and Daria, L. (2022). Two heuristics for
one of bin-packing problems. IFAC-PapersOnLine,
55(10):2575–2580. 10th IFAC Conference on Man-
ufacturing Modelling, Management and Control MIM
2022.
Farhi, E., Goldstone, J., and Gutmann, S. (2014). A quan-
tum approximate optimization algorithm.
Fredman, M. L. and Tarjan, R. E. (1987). Fibonacci heaps
and their uses in improved network optimization algo-
rithms. J. ACM, 34(3):596–615.
Glover, F., Kochenberger, G., and Du, Y. (2019). A tutorial
on formulating and using qubo models.
Golub, G. and Kahan, W. (1965). Calculating the singular
values and pseudo-inverse of a matrix. Journal of the
Society for Industrial and Applied Mathematics Series
B Numerical Analysis, 2(2):205–224.
Gutin, G. and Yeo, A. (2007). The greedy algorithm for
the symmetric tsp. Algorithmic Operations Research,
2(1).
Hao, T., Huang, X., Jia, C., and Peng, C. (2022). A
quantum-inspired tensor network algorithm for con-
strained combinatorial optimization problems. Fron-
tiers in Physics, 10.
Hart, P. E., Nilsson, N. J., and Raphael, B. (1968). A for-
mal basis for the heuristic determination of minimum
cost paths. IEEE Transactions on Systems Science and
Cybernetics, 4(2):100–107.
Katangur, A., Pan, Y., and Fraser, M. (2002). Message rout-
ing and scheduling in optical multistage networks us-
ing simulated annealing. In Proceedings 16th Inter-
national Parallel and Distributed Processing Sympo-
sium, pages 8 pp–.
Korte, B. and Vygen, J. (2000). Bin-Packing, pages 407–
422. Springer Berlin Heidelberg, Berlin, Heidelberg.
Korte, B. and Vygen, J. (2008). The Traveling Salesman
Problem, pages 527–562. Springer Berlin Heidelberg,
Berlin, Heidelberg.
Laporte, G. (1992). The traveling salesman problem: An
overview of exact and approximate algorithms. Eu-
ropean Journal of Operational Research, 59(2):231–
247.
Lenstra, J. K. (1992). Job shop scheduling. In Akg
¨
ul, M.,
Hamacher, H. W., and T
¨
ufekc¸i, S., editors, Combina-
torial Optimization, pages 199–207, Berlin, Heidel-
berg. Springer Berlin Heidelberg.
Mathews, G. B. (1896). On the partition of numbers.
Proceedings of the London Mathematical Society, s1-
28(1):486–490.
Peruzzo, A., McClean, J., Shadbolt, P., Yung, M.-H., Zhou,
X.-Q., Love, P. J., Aspuru-Guzik, A., and O’Brien,
J. L. (2014). A variational eigenvalue solver on a pho-
tonic quantum processor. Nature Communications,
5(1):4213.
Pilcher, T. (2023). A self-adaptive genetic algorithm for the
flying sidekick travelling salesman problem.
Qing, Y., Li, K., Zhou, P.-F., and Ran, S.-J. (2024). Com-
pressing neural network by tensor network with expo-
nentially fewer variational parameters.
Wang, B. and Dong, H. (2024). Bin packing optimization
via deep reinforcement learning.
Wang, J., Roberts, C., Vidal, G., and Leichenauer, S.
(2020). Anomaly detection with tensor networks.
CoRR, abs/2006.02516.
IQSOFT 2025 - 1st International Conference on Quantum Software
88
