
Lens Aberrations Detection and Digital Camera Identification with
Convolutional Autoencoders
Jarosław Bernacki
1 a
and Rafał Scherer
2 b
1
Department of Artificial Intelligence, Cze¸stochowa University of Technology,
al. Armii Krajowej 36, 42-200 Cze¸stochowa, Poland
2
Faculty of Computer Science, AGH University of Krakow, Poland
Keywords:
Privacy, Security, Convolutional Neural Networks, Convolutional Autoencoders, Digital Forensics, Digital
Camera Identification, Hardwaremetry.
Abstract:
Digital camera forensics relies on the ability to identify digital cameras based on their unique characteristics.
While many methods exist for camera fingerprinting, they often struggle with efficiency and scalability due to
the large image sizes produced by modern devices. In this paper, we propose a novel approach that utilizes
convolutional and variational autoencoders to detect optical aberrations, such as vignetting and distortion.
Our model, trained in an aberration-independent manner, enables automatic detection of these distortions
without needing reference patterns. Furthermore, we demonstrate that the same methodology can be applied
to digital camera identification based on image analysis. Extensive experiments conducted on multiple cameras
and images confirm the effectiveness of our approach in both aberration detection and device fingerprinting,
highlighting its potential applications in forensic investigations.
1 INTRODUCTION
Digital forensics is a field that has garnered signif-
icant attention in recent years. One of the most
prominent topics in digital forensics is the identifi-
cation of imaging sensors in digital cameras. Dig-
ital cameras have become widely accessible and af-
fordable, contributing to their popularity. Even more
prevalent are smartphones and mobile devices, com-
monly equipped with built-in digital cameras. This
widespread availability encourages people to take
photos and share them on social media networks.
However, the capability to determine whether an im-
age was taken by a specific camera can pose a seri-
ous threat to user privacy. Consequently, a substan-
tial body of research in recent years has focused on
studying imaging device artifacts that can be used for
digital camera identification.
Digital camera identification can be approached in
two primary ways: individual source camera identi-
fication (ISCI) and source model camera identifica-
tion (SCMI). ISCI can distinguish a specific camera
among cameras of the same model and different mod-
els. In contrast, SCMI can only differentiate between
a
https://orcid.org/0000-0002-4488-3488
b
https://orcid.org/0000-0001-9592-262X
different camera models but not between individual
cameras of the same model. For example, given cam-
eras such as Canon EOS R (0), Canon EOS R (1), ...,
Canon EOS R (n), Nikon D780 (0), Nikon D780 (1),
Sony A1 (0), and Sony A1 (1), ISCI would differenti-
ate each camera, while SCMI would only identify the
general models (Canon EOS R, Nikon D780, Sony
A1). This limitation of SCMI motivates the develop-
ment of methods and algorithms focused on the ISCI
aspect.
The most common methods for digital camera
identification are based on Photo-Response Non-
Uniformity (PRNU). These methods compare the
noise patterns of a given image with the known noise
pattern of a camera. PRNU arises from imperfections
in the image sensor, creating a unique pattern for each
camera. This pattern can be estimated from multiple
images captured by a camera and used as a reference
for identification. If the PRNU patterns match, the
image was likely captured by that camera. PRNU-
based methods are widely used due to their robustness
against post-capture processing and compression.
A state-of-the-art algorithm for ISCI was pro-
posed by Luk’as et al. (Luk
´
as et al., 2006), utilizing
PRNU for camera identification. The PRNU K may
be calculated in the following manner: K = I − F(I),
84
Bernacki, J., Scherer and R.
Lens Aberrations Detection and Digital Camera Identification with Convolutional Autoencoders.
DOI: 10.5220/0013485900003979
In Proceedings of the 22nd International Conference on Security and Cryptography (SECRYPT 2025), pages 84-95
ISBN: 978-989-758-760-3; ISSN: 2184-7711
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

where I is the input image and F is a denoising filter.
This PRNU acts as a unique fingerprint for the cam-
era. Many studies have confirmed the high efficacy
of this method. However, a significant drawback is
that the camera’s fingerprint is represented as a ma-
trix with the original image dimensions, posing stor-
age challenges for large numbers of PRNUs in foren-
sic centers. This issue drives the need for methods to
minimize this storage problem.
Another approach involves feature-based meth-
ods, which extract features such as metadata, color
balance, geometric distortion, lens artifacts, etc.,
and match them with known camera features. The
most recent family of methods utilizes deep learning,
typically employing convolutional neural networks
(CNNs) to extract features from images and compare
them with features from known cameras (Bondi et al.,
2017; Ding et al., 2019; Kirchner and Johnson, 2020;
Li et al., 2018; Luk
´
as et al., 2006; Mandelli et al.,
2020; Yao et al., 2018). Additionally, various hybrid
methods combine multiple algorithms to enhance the
accuracy of camera identification.
Lens aberration identification is a critical aspect
of digital forensics. Despite technological advance-
ments, both digital single-lens reflex (DSLR) and
mirrorless cameras continue to suffer from various
optical issues. Common deviations include chro-
matic aberrations, dispersion, vignetting, distortion,
and coma. Vignetting, which can result from opti-
cal defects or sensor imperfections (Lopez-Fuentes
et al., 2015; Ray, 2002), is a reduction of the im-
age brightness near the edges, leading to darker cor-
ners. This flaw is especially prevalent in compact and
DSLR cameras. Types of vignetting are thoroughly
detailed in (Lopez-Fuentes et al., 2015), and the prob-
lem has garnered significant research attention, with
numerous algorithms (De Silva et al., 2016; Kordecki
et al., 2017) and patents (Lee et al., 2017) proposed
for its correction. Another related issue is lens dis-
tortion, which occurs as a deviation from rectilinear
projection (Park and Hong, 2001; Claus and Fitzgib-
bon, 2005). This distortion causes straight lines to ap-
pear curved in images and is characterized by changes
in magnification relative to the image’s distance from
the optical axis (Goljan and Fridrich, 2014).
1.1 Contribution
The contribution of this paper is twofold. Firstly, we
propose a method that utilizes a convolutional (CAE)
and variational (VAE) autoencoder to identify images
that show different types of lens aberrations, includ-
ing lens vignetting and distortion. We experimentally
show that our methods are capable of detecting lens
vignetting based on several models of lenses, as well
as detecting lens distortion with a reliable probabil-
ity. Secondly, we show that the proposed autoen-
coders may be used to identify digital cameras in the
ISCI aspect based on images. We demonstrate that
this approach requires less time for training, which
may speed up the image processing workflow. Our
experiments, conducted on a large set of modern dig-
ital cameras, confirm that the accuracy of our method
is comparable to state-of-the-art methods. Addition-
ally, we perform a statistical analysis of the obtained
results, which further confirms their reliability.
1.2 Organization of the Paper
The paper is organized as follows. The next section
discusses previous and related works. In Section 3
the problem formulation and the proposed method are
described. Section 4 presents the results of classifica-
tion compared with the state-of-the-art methods. In
Section 5 there are described the results of statistical
analysis. The final section concludes this work.
2 PREVIOUS AND RELATED
WORK
In (Baar et al., 2012), the authors proposed utilizing
the k-means algorithm to manage photo response non-
uniformity (PRNU) patterns. These patterns are com-
pared using correlation and then grouped by the k-
means algorithm. As a result, patterns grouped within
the same cluster are considered to belong to the same
camera. Experiments conducted on a database of 500
images showed that images within a cluster had a
true positive rate (TPR) of 98% for belonging to a
particular camera. In (Julliand et al., 2016), the au-
thors demonstrate that different types of noise signifi-
cantly affect raw images. They show that JPEG lossy
compression generates noise that impacts groups of
pixels. A specific example highlighted how an im-
age’s histogram changes before and after saving it as
a JPEG, indicating that JPEG compression introduces
distinct artifacts that can be used for identification
purposes. In (Taspinar et al., 2016), the feasibility
of sensor recognition for image blocks smaller than
50 × 50 pixels is explored. The study uses the peak-
to-correlation energy (PCE) ratio for verification, and
results indicate that analyzing such small blocks with
low PCE values is inefficient. The objective of (Jiang
et al., 2016) is to determine if images across several
social network accounts were taken by the same user.
The authors employ the formula from (Luk
´
as et al.,
2006) to find the camera fingerprint and cluster im-
Lens Aberrations Detection and Digital Camera Identification with Convolutional Autoencoders
85

ages based on correlation. Experiments with 1576 im-
ages evaluated performance using precision and recall
measures, achieving a clustering precision of 85% and
a recall of 42%.
The analysis of how image features affect PRNU
is discussed in (Tiwari and Gupta, 2018). Intensity-
based features and high-frequency details, such as
edges and textures, impact the final quality of the
camera’s fingerprint. To enhance this quality, a
weighting function (WF) is proposed. Initially, re-
gions of the image that provide reliable and unre-
liable PRNU are estimated. Then, the WF assigns
higher weights to regions yielding reliable PRNU and
lower weights to those producing less reliable PRNU.
In (Marra et al., 2018), the vulnerability of deep learn-
ing approaches to adversarial attacks in digital cam-
era identification is examined. The goal is to demon-
strate how to deceive a CNN-based classifier to pro-
duce incorrect camera identification. The study de-
scribes several scenarios where the image undergoes
lossless or lossy compression. Attacks on the clas-
sifier are performed using methods such as the Fast
Gradient Sign Method (FGSM)(Goodfellow et al.,
2015), DeepFool(Moosavi-Dezfooli et al., 2016), and
the Jacobian-based Saliency Map Attack (JSMA) (Pa-
pernot et al., 2016). FGSM involves adding additive
noise to the image, which can sometimes visibly af-
fect image quality. To mitigate this, DeepFool uses lo-
cal linearization of the classifier under attack. JSMA,
on the other hand, is a greedy iterative procedure that
computes a saliency map at each iteration, identifying
the pixels that most influence correct classification.
Experiments demonstrated that these attack methods
can effectively deceive CNN-based classifiers.
3 PROPOSED AUTOENCODERS
3.1 Preliminaries and Problem
Formulation
Camera’s Fingerprint. Let M be the number of
images from camera A
(i)
. In order to learn the speci-
ficity of the camera (but not the content of the input
image), we denoise the cameras’ images. We use
the well-known formula presented as eq. 1, utilized
in (Luk
´
as et al., 2006; Tuama et al., 2016) to calculate
the residuum K
j
for the j-th image of camera A
(i)
:
K
j
= I
j
− F(I
j
) (1)
where I
j
is the j-th image of camera A
(i)
, and F stands
for a denoising filter. To obtain the fingerprint K
(i)
of
the camera A
(i)
we calculate:
K
(i)
=
1
M
M
∑
k=1
K
(i)
k
(2)
According to (Luk
´
as et al., 2006), the procedure de-
scribed as eq. 2 is representative, if M > 45.
Camera Identification. Let us define the camera
identification task as the statistical approach.
Definition 1. (Camera identification task) Let N be
the number of cameras. For the image I define, from
which camera A
(i)
(where i ∈ {1, 2, . . ., N}) this image
comes from. We define the following hypotheses:
• The null hypothesis (H
0
): The image I comes
from the camera A
(i)
;
• The alternative hypothesis (H
1
): The image I does
not come from the camera A
(i)
.
To verify the hypotheses we have to define the sta-
tistical test T (I), which measures the compatibility of
the fingerprint K
(i)
from the camera A
(i)
with a new
residuum K
x
(eq. 3):
T (I) = D(K
(i)
, K
x
) (3)
where D may be a distance function or correlation co-
efficient. We reject the null hypothesis H
0
, whether:
T (I) > τ (4)
where τ is a rejection threshold (the critical value) on
the significance level α.
The image I is considered as made with the cam-
era A
(i)
, if the test statistic meets the criterion:
T (I) ≤ τ (5)
If for all cameras T (I) > τ, then the image I was not
made by any of the considered cameras.
Aberrations. In this paper, we consider the follow-
ing lens aberrations: vignetting and distortion. Lens
vignetting is a defect that manifests itself as a de-
crease in the brightness of an image, usually in all its
corners relative to the center (Lanh et al., 2007; Ko-
rdecki et al., 2015). Formally, lens vignetting can be
modeled as presented in Def. 2.
Definition 2. (Lens vignetting) Let I
0
(x
0
, y
0
) denote
the brightness in the middle of the image I. The vi-
gnetting may be defined as the following:
I(r
(v)
) = I
0
·
1 − k ·
r
(v)
r
max
(v)
2
(6)
where:
• I(r
(v)
) – brightness in a selected pixel with r
(v)
distance from the middle of the image I;
SECRYPT 2025 - 22nd International Conference on Security and Cryptography
86

• I
0
(x
0
, y
0
) – brightness in the middle of the image
I;
• k – vignetting coefficient;
• r
max
(v)
– maximum distance from the middle of the
image I.
The r
(v)
may be calculated using the Euclidean
distance r
(v)
=
p
(x − x
0
)
2
+ (y −y
0
)
2
for any pixel
(x, y).
Lens distortion is an optical defect that is visible in
photos as a distortion of shapes due to deviation from
a rectilinear projection (e.g. the edge of a building
in a distorted photo appears to be deviated from the
vertical, etc.). The most common types of distortion
are barrel distortion and pincushion distortion. In bar-
rel distortion, the center of the frame is emphasized,
while in pincushion distortion, the center of the frame
looks “sunken” (Goljan and Fridrich, 2014). Simpli-
fying a bit, distortion occurs when lines created by
pixels, which in the real world should be vertical or
horizontal, are not parallel to its edges or are curved in
the photo. Formally, lens distortion can be described
as in Def. 3.
Definition 3. (Lens distortion) For an image without
distortion, the pixel coordinates (x, y) are mapped to
the coordinates (x
′
, y
′
) in the distorted image accord-
ing to the equation:
r
′
(d)
= r
(d)
· (1 +k
1
r
2
(d)
+ k
2
r
4
(d)
) (7)
where:
• r
(d)
is the distance of the pixel from the center of
the image;
• k
1
, k
2
– distortion coefficients;
• r
′
(d)
– the distance of the distorted pixel from the
center.
Let us define the task of aberration detection,
which is considered as lens vignetting and lens distor-
tion detection, using the convolutional autoencoder.
Definition 4. (Aberration detection) Let D =
{I
j
, Y
j
}
M
j=1
denote the training set. The I
j
is an in-
put image, and Y
j
denotes the mask corresponding to
the image I
j
, where each value y
jk
∈ {0, 1} represents
every pixel of I
j
if it shows the aberration (1) or not
(0). The I
j
has dimensions H ×W × C, where H is
the image height, W stands for the image width and
C is the number of color channels (typically for RGB
images C = 3).
Let f
θ
be the convolutional autoencoder with pa-
rameters θ. The autoencoder f
0
transforms the im-
age I
j
into the matrix of predictions
ˆ
Y
j
, where
ˆ
Y
j
=
f
θ
(I
j
). The dimensions of
ˆ
Y
j
are H × W , where
ˆy
jk
∈ [0, 1] is the probability that the k-th pixel shows
the aberration.
Definition 5. (Loss function) For the image I
j
the bi-
nary cross-entropy function is defined as:
Λ(I
j
, Y
j
,
ˆ
Y
j
) = −
1
HW
H×W
∑
k=1
[y
jk
log( ˆy
jk
)+
(1 − y
jk
)log(1 − ˆy
jk
)]
(8)
where:
• y
jk
is the label for the pixel k;
• ˆy
jk
is the probability for the pixel k;
• H and W are dimensions of the image I
j
.
Definition 6. (Minimizing the loss function) During
the training the parameters θ are optimized, minimiz-
ing the loss function:
min
θ
1
M
M
∑
j=1
Λ(I
j
, Y
j
,
ˆ
Y
j
) (9)
As the optimization algorithm, Adam (Kingma
and Ba, 2015) is used.
Definition 7. (Aberration prediction) The autoen-
coder f
θ
generates for the new image I
x
the matrix
of predictions
ˆ
Y
x
= f
θ
(I
x
). To receive the final de-
cision on aberration, the thresholding is used in the
following manner:
ˆy
x,k
=
(
1 if ˆy
x,k
≥ γ
0 if ˆy
x,k
< γ
where γ is a threshold, for instance γ = 0.5 decides if
the pixel k is marked as aberrated (1) or not (0).
3.2 The Proposed Autoencoders
Convolutional Autoencoder. The convolutional
autoencoder (CAE) is a classic autoencoder approach
that consists of two main parts: the encoder (encod-
ing part), and the decoder (the decoding part). The
encoder reduces the input resolution gradually as the
number of channels increases. The decoder, con-
versely, restores the original resolution. We propose
the following structure of the CAE:
The encoding part:
(1) A first convolutional layer of 32 filters of size 3 ×
3 (stride 2), with ReLU as an activation function,
followed by a Max-Pooling layer + padding 1;
(2) A second convolutional layer of 64 filters of
size 3 × 3 (stride 2), with ReLU as an activa-
tion function, followed by a Max-Pooling layer +
padding 1;
(3) A third convolutional layer of 128 filters of size
3 × 3 (stride 2), with ReLU as an activation
function, followed by a Max-Pooling layer +
padding 1;
Lens Aberrations Detection and Digital Camera Identification with Convolutional Autoencoders
87

(4) A fourth convolutional layer of 256 filters of
size 3 × 3 (stride 2), with ReLU as an activa-
tion function, followed by a Max-Pooling layer +
padding 1.
The decoding part:
(1) A first transposed convolutional layer of 128 fil-
ters of size 3 × 3 (stride 2), with ReLU as an acti-
vation function, followed by a Max-Pooling layer
+ padding 1;
(2) A second transposed convolutional layer of 64 fil-
ters of size 3 × 3 (stride 2), with ReLU as an acti-
vation function, followed by a Max-Pooling layer
+ padding 1;
(3) A third transposed convolutional layer of 32 fil-
ters of size 3 × 3 (stride 2), with ReLU as an acti-
vation function, followed by a Max-Pooling layer
+ padding 1;
(4) A fourth transposed convolutional layer with a fil-
ter of size 3× 3 (stride 2), with sigmoid as an acti-
vation function, followed by a Max-Pooling layer
+ padding 1.
The encoder consists of four convolutional layers,
which gradually reduce the image resolution and in-
crease the number of channels. Each convolutional
layer acts as a filter, capturing increasingly abstract
features – from edges and textures to more complex
structures. As we go through the layers, information
about details is lost, but important features are pre-
served, representing the image in a compressed way.
After the last layer, we get a low-dimensional repre-
sentation (so-called latent vector).
The decoder reverses the encoder’s operation – it
uses transposed convolutional layers (deconvolution)
to restore the original image size. Each step gradually
increases the resolution, reconstructing missing de-
tails. The final layer returns an image in the range of
values [0,1], usually using a sigmoid activation func-
tion. The model learns to minimize the difference be-
tween the input and the output, so it can effectively
eliminate noise or detect anomalies when the recon-
struction does not match the input (e.g. distortion or
vignetting).
Variational Autoencoder. The structure of the vari-
ational autoencoder (VAE) is generally similar to the
structure of CAE, but additionally, the VAE uses lin-
ear layers (fully connected) to encode an image into
the latent vector. Let us discuss the proposed VAE
with the following structure:
The encoding part:
(1) A first convolutional layer of 32 filters of size 3 ×
3 (stride 2), with ReLU as an activation function,
followed by a Max-Pooling layer + padding 1;
(2) A second convolutional layer of 64 filters of
size 3 × 3 (stride 2), with ReLU as an activa-
tion function, followed by a Max-Pooling layer +
padding 1;
(3) A third convolutional layer of 128 filters of size
3 × 3 (stride 2), with ReLU as an activation
function, followed by a Max-Pooling layer +
padding 1;
(4) A fourth convolutional layer of 256 filters of
size 3 × 3 (stride 2), with ReLU as an activa-
tion function, followed by a Max-Pooling layer +
padding 1;
(5) Fully connected layers which generate the µ
(mean) and logvar (log variance) parameters to
model the latent vector.
The decoding part:
(1) A first transposed convolutional layer of 128 fil-
ters of size 3 × 3 (stride 2), with ReLU as an acti-
vation function, followed by a Max-Pooling layer
+ padding 1;
(2) A second transposed convolutional layer of 64 fil-
ters of size 3 × 3 (stride 2), with ReLU as an acti-
vation function, followed by a Max-Pooling layer
+ padding 1;
(3) A third transposed convolutional layer of 32 fil-
ters of size 3 × 3 (stride 2), with ReLU as an acti-
vation function, followed by a Max-Pooling layer
+ padding 1;
(4) A fourth transposed convolutional layer with a fil-
ter of size 3× 3 (stride 2), with sigmoid as an acti-
vation function, followed by a Max-Pooling layer
+ padding 1.
Similar to a classic autoencoder, the encoder con-
sists of convolutional layers that reduce the image res-
olution and extract key features. However, instead of
returning a latent vector, the model generates two vec-
tors – µ (mean) and logvar (log variance), which de-
fine a normal distribution in the latent vector. Instead
of direct encoding, the model samples values from
this distribution (using reparameterization), which in-
troduces an element of randomness and allows the
generation of new images.
The decoder works similarly to CAE, but instead
of reconstructing the image from a latent vector, it
does so from a sample taken from a Gaussian distri-
bution. This allows the model to generate diverse im-
ages, even if the input image is the same. The decoder
gradually increases the resolution through transposed
convolutional layers and ends with a layer with sig-
moid activation, returning the image reconstruction.
SECRYPT 2025 - 22nd International Conference on Security and Cryptography
88

The Discriminator. In order to classify images, the
discriminator may be used. The idea of the discrimi-
nator is based on the Generative Adversarial Network
(GAN) (Goodfellow et al., 2014). The use of the
discriminator is essential to classify the images pro-
duced by autoencoder decoders. We propose to use
as the discriminator a convolutional neural network,
however, well-known machine learning algorithms,
such as Support Vector Machine (SVM) might also
be used.
The structure of the sample discriminator is described
below:
(1) A first convolutional layer of 32 filters of size 3 ×
3 with ReLU as an activation function, stride 2,
followed by a max-pooling layer;
(2) A second convolutional layer of 64 filters of size
3 × 3 with ReLU as an activation function, stride
2, followed by a max-pooling layer;
(3) A third convolutional layer of 128 filters of size
3 × 3 with ReLU as an activation function, stride
2, followed by a max-pooling layer;
(4) Fully connected 512 + dropout 0.5 + ReLU;
(5) Fully connected 128 + dropout 0.5.
The activation function is softmax.
All meta-parameters both for the proposed autoen-
coders, as well the discriminator were determined ex-
perimentally.
4 EXPERIMENTAL EVALUATION
We conduct two experiments. The first experiment
presents the results of lens aberrations detection, in-
cluding vignetting and distortion identification with
the proposed autoencoders. The second experiment
shows the standard identification procedure for both
of the proposed CAE and VAE, as well as considered
state-of-the-art methods.
4.1 Experimental Setup
Datasets. For both experiments, we use images
coming from the IMAGINE dataset (Bernacki. and
Scherer., 2023).
For experiment I, we use both images from
the IMAGINE dataset but also blank images that
may make learning the lens vignetting and lens
distortion. Firstly, the autoencoders are trained with
aberration-free images. To determine whether the
images have distorted pixels, we have used the Hugin
Photo Stitcher software (hug, enet). For each case
(no vignetting; not distorted) at least 30 images were
used (per lens). Sample images used for training are
shown as Fig. 1 and 2. The following cameras and
lenses were used for the Experiment I:
Nikon D3100:
1. Nikon Nikkor AF-S DX 18-105 mm f/3.5-5.6 VR
ED
2. Nikon Nikkor AF-S DX 35 mm f/1.8G
Nikon D7200:
1. Nikon Nikkor AF-P DX 10-20 mm f/4.5-5.6G VR
2. Nikon Nikkor AF-S DX 18-55 mm f/3.5-5.6G VR
ED
3. Nikon Nikkor AF-S DX Micro 40 mm f/2.8G
Nikon D750:
1. Nikon Nikkor AF-S 20 mm f/1.8G ED
2. Nikon Nikkor AF 50 mm f/1.8D
Panasonic GX80:
1. Panasonic G VARIO 14-42 mm f/3.5-5.6 MEGA
O.I.S
2. Olympus M.Zuiko Digital ED 30 mm f/3.5 Macro
For experiment II, we use a set of 17 modern cam-
eras that include Canon EOS 1D X Mark II (C1),
Canon EOS 5D Mark IV (C2), Canon EOS M5 (C3),
Canon EOS M50 (C4), Canon EOS R (C5), Canon
EOS R6 (C6), Canon EOS RP (C7), Fujifilm X-T200
(F1), Nikon D5 (N1), Nikon D6 (N2), Nikon D500
(N3), Nikon D780 (N4), Nikon D850 (N5), Nikon
Z6 II (N6), Nikon Z7 II (N7), Sony A1 (S1), Sony
A9 (S2). At least 30 images per camera are used for
learning.
Evaluation Measures. As evaluation, we use stan-
dard accuracy (ACC), defined as:
ACC =
TP + TN
TP + TN + FP + FN
where TP/TN denotes “true positive/true negative”;
FP/FN stands for “false positive/false negative”. TP
denotes the number of cases correctly classified to a
specific class; TN refers to instances that are correctly
rejected. FP denotes cases incorrectly classified to the
specific class; FN is cases incorrectly rejected.
Implementation. Experiments are held on a Gi-
gabyte Aero notebook equipped with an Intel Core
i7-13700H CPU with 32 gigabytes of RAM and a
Nvidia GeForce RTX 4070 GPU with 8 gigabytes of
video memory. Scripts for CNNs are implemented
in Python under the PyTorch framework (with Nvidia
CUDA support).
Lens Aberrations Detection and Digital Camera Identification with Convolutional Autoencoders
89

(a) (b) (c)
Figure 1: Sample images for lens vignetting identification: (a) – blank vignetted image; (b) and (c) – blank and natural
(respectively) non-vignetted images (Nikon D750 + Nikon Nikkor AF-S 20 mm f/1.8G ED).
(a) (b)
Figure 2: Sample images for lens distortion identification:
(a) – distorted image; (b) – non-distorted image (Nikon
D3100 + Nikon Nikkor AF-S DX 18-105 mm f/3.5-5.6 VR
ED).
4.2 State-of-the-Art Methods – Recall
Let us recall some methods for a digital camera iden-
tification.
Mandelli et al.’s CNN. Let us briefly recall the
structure of Mandelli et al.’s (Mandelli et al., 2020)
convolutional neural network (CNN):
(1) A first convolutional layer of kernel 3 × 3 produc-
ing feature maps of size 16×16 pixels with Leaky
ReLU as an activation method and max-pooling;
(2) A second convolutional layer of kernel 5 × 5 pro-
ducing feature maps of size 64 × 64 pixels with
Leaky ReLU as an activation method and max-
pooling;
(3) A third convolutional layer of kernel 5×5 produc-
ing feature maps of size 64×64 pixels with Leaky
ReLU as an activation method and max-pooling;
(4) A pairwise correlation pooling layer;
(5) Fully connected layers (FC).
For more details related to the structure of the net-
work, we refer to the authors’ paper.
Kirchner & Johnson’s CNN. Kirchner and John-
son (Kirchner and Johnson, 2020) proposed a follow-
ing network:
1. 17 layers implementing 64 convolutional filters
with 3 × 3 kernels;
2. ReLU as an activation method after each layer;
3. Fully connected layers (FC).
All aforementioned convolutional neural networks
are trained by noise residuals calculated with the de-
noising formula (Eq. 10).
Luk
´
as et al.’s Algorithm. The non-convolutional
Luk
´
as et al.’s algorithm (Luk
´
as et al., 2006) is based
on the calculation of the noise residual K as shown in
Equation 10.
K = I − F(I), (10)
where F is a denoising (usually wavelet-based) filter,
the K stands for a single noise residual of one image I.
To obtain a representative noise residual of the cam-
era, this procedure should be repeated for at least 45
images. The camera’s noise residual is finally calcu-
lated as an average of a particular number of single
noise residuals. It is recommended to process images
in their original resolution.
4.3 Experiment I – Detecting Lens
Aberrations
In this experiment, we tested our proposed autoen-
coders to see if they were capable of detecting images
with lens aberrations that were considered vignetting
and distortion. The CAE and VAE were trained both
the non-vignetted and undistorted images I
u
. After
training, the new test images representing aberrations
I
a
were passed to the autoencoders in order to recon-
struct a new image I
a
r
. We have analyzed the mean
squared error (MSE, eq. 11) between the reconstruc-
tion of aberrated I
a
and I
a
r
images.
MSE =
1
MN
M
∑
i=1
N
∑
j=1
I
a
(i, j)− I
a
r
(i, j)
2
(11)
According to our experiments, if MSE > 10, we
interpreted that CAE/VAE detected the aberration.
Otherwise, the aberration was not detected. The M
and N stand for images dimensions (in pixels).
SECRYPT 2025 - 22nd International Conference on Security and Cryptography
90
Lens Vignetting Detection. The results of the vi-
gnetting detection for the CAE and VAE autoencoders
are presented in Tab. 1 and 2.
Table 1: CAE: Results of classifying the images that repre-
sent vignetting for all used cameras and lenses [%].
vignetted non-vignetted
vignetted 83.0 17.0
non-vignetted 10.0 90.0
Table 2: VAE: Results of classifying the images that repre-
sent vignetting for all used cameras and lenses [%].
vignetted non-vignetted
vignetted 89.0 11.0
non-vignetted 6.0 94.0
The average accuracy of the proposed autoen-
coders for classifying both vignetting and non-
vignetting images is 89.0%. In the case of CAE,
vignetted images are correctly identified in 83.0%,
meaning that some images (17.0%) are not detected.
The VAE performs even better, achieving 89.0% in
recognizing vignetted images. Both models per-
form slightly better in recognizing non-vignetting im-
ages, correctly classifying 90.0% (CAE) and 94.0%
(VAE) of them. However, there are still false posi-
tives, meaning that some non-vignetting images are
incorrectly labeled as vignetting. Overall, both mod-
els show satisfactory performance but may require
further improvements to better distinguish between
difficult-to-classify cases.
Lens Distortion Detection. The results of the dis-
tortion detection for both autoencoders are presented
in Tab. 3 and 4.
Table 3: CAE: Results of classifying the images that repre-
sent distortion for all used cameras and lenses [%].
distorted non-distorted
distorted 87.0 13.0
non-distorted 11.0 89.0
Table 4: VAE: Results of classifying the images that repre-
sent distortion for all used cameras and lenses [%].
distorted non-distorted
distorted 92.0 8.0
non-distorted 7.0 93.0
In the case of distortion recognition, the average
accuracy of the proposed autoencoders is also equal
to 90.25%. These results indicate that the proposed
models offer reliable results of lens distortion detec-
tion. The test images representing the distortion were
correctly identified in 87.0% and 92.0% of instances
for CAE and VAE, respectively. However, 13.0% and
8.0% were incorrectly identified as non-distorted. On
the other hand, 89.0% of non-distorted test images
were correctly detected (CAE); 93.0% is the result
of the VAE. Similarly, as in the case of vignetting,
some images were incorrectly classified as distorted
images.
4.4 Experiment II – Results of Digital
Camera Identification
We have also tested, if the proposed autoencoders
may realize the task of camera identification based on
images. However contrary to Experiment I, the us-
age of CAE and VAE were changed. We have used
only the encoder part of both autoencoders in order
to generate the latent vectors. Then, the discriminator
(introduced in subsec. 3.2) was trained with the latent
vectors and made the final classification. In this ex-
periment, all the tested methods were trained with the
noise residuals calculated in the manner as shown in
Eq. 10. Due to paper limitations, we skip presenting
confusion matrices of cameras’ classification results.
The shortened results of classification are presented
in Tab. 5.
Table 5: Results of classification.
Method ACC [%]
CAE 91.0
VAE 89.0
Mandelli 92.0
Kirchner 92.0
Luk
´
as 92.0
The results clearly indicate that all methods en-
sure very high identification accuracy. The proposed
CAE achieves 91.0% identification accuracy, and the
VAE 89.0%. In the other cases, the overall iden-
tification accuracy obtains at least 92.0%; the par-
ticular TPs are not lower than 90.0% for each cam-
era. The Luk
´
as et al.’s algorithm achieves almost the
same results compared to CNN-based methods. This
clearly confirms that all methods ensure reliable in-
dividual source camera identification. In the case of
the discussed CNNs, the results are very similar to
each other both in terms of identification accuracy and
speed of learning.
All the methods require a similar number of train-
ing epochs to obtain the desired level of identification
accuracy, which in this case was set to 2000. The
learning rate was equal to 0.01, the Adam optimizer
was used.
Lens Aberrations Detection and Digital Camera Identification with Convolutional Autoencoders
91
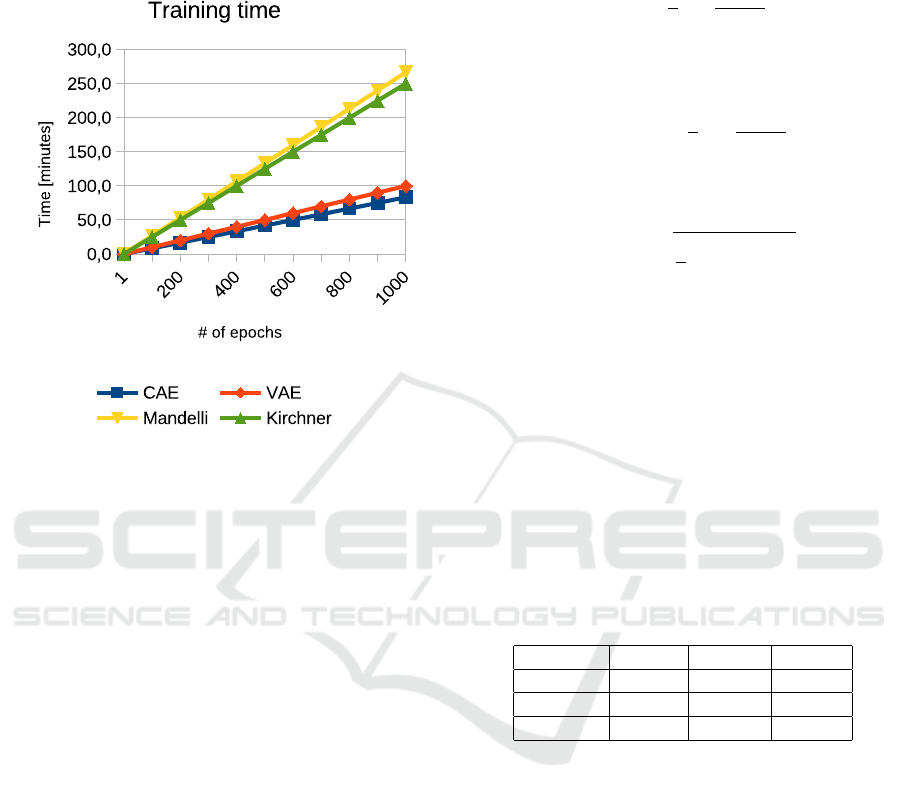
Speed of Learning. We have compared the time
needed for training the proposed autoencoders and
CNN-based methods. Results may be seen in Fig. 3.
Figure 3: Comparison of time needed for learning 1000
epochs.
Results indicate that training the CAE and VAE
requires less time per epoch than using state-of-the-art
CNNs. One epoch using the proposed AEs is passed
over 0.1 of a minute while using CNN turns to about
0.3 of a minute. Therefore, the overall time for pass-
ing 1000 epochs requires about 100 minutes for the
proposed AEs and at least 250 minutes (more than 4
hours) for CNNs. Thus, it confirms the advantages
over the literature methods.
5 STATISTICAL VERIFICATION
– EXPERIMENT II
In this section, we analyze the TP values between
the proposed autoencoders, Mandelli, Kirchner, and
Luk
´
as et al.’s algorithms. We determine whether there
exist significant differences in this data. For this pur-
pose, we analyze the MAE, MAPE, and RMSE error
values, as well as the statistical verification of the de-
fined hypotheses. The statistical verification concerns
the results presented in Experiment II.
5.1 Error Analysis
We compare the TPs obtained by the proposed
method and state-of-the-art methods by calculat-
ing estimators including mean absolute error (MAE,
eq. 12), mean absolute percentage error (MAPE,
eq. 13) and root mean square error (RMSE, eq. 14).
MAE =
1
n
n
∑
t=1
y
t
− x
t
n
(12)
where x
t
is the actual value, y
t
is a predicted value and
n is the number of observations.
MAPE = 100
1
n
n
∑
t=1
x
t
− y
t
x
t
(13)
where x
t
is the actual value, y
t
is a predicted value and
n is the number of observations.
RMSE =
s
1
n
n
∑
t=1
x
t
− y
t
2
(14)
where x
t
is the actual value, y
t
is a predicted value and
n is the number of observations.
The results confirm that the classification using
the proposed autoencoders achieves similar results as
state-of-the-art algorithms. The MAE values obtain
1.05-1.12; the RMSE receives from 1.23 to 1.47, and
the MAPE measure reaches from 1.15 to 1.20. Such
small values mean that TP results obtained by the pro-
posed autoencoders compared with other methods do
not differ more than 1.20%. Also, none of the mea-
sures exceed 1.47, which we find satisfactory. The
results of the analysis are shown in Tab. 6.
Table 6: The values of MAE, MAPE, and RMSE measures
of the proposed CAE/VAE against state-of-the-art methods.
MAE MAPE RMSE
Mandelli 1.0588 1.1483 1.3284
Kirchner 1.0588 1.1510 1.2367
Luk
´
as 1.1176 1.2034 1.4753
5.2 Hypotheses Verification
We have checked if there exists a statistical differ-
ence between the results of classification by the CAE,
VAE, and methods by Mandelli, Kirchner, and Luk
´
as.
All tests were performed at the significance level α =
0.05. The first step is the normality test. The hypothe-
ses are defined as follows:
• H
0
: Data represent the normal distribution;
• H
1
: Data does not represent the normal distribu-
tion.
We use the single-sample Shapiro-Wilk (SW) test.
Results are presented in Tab. 7.
SECRYPT 2025 - 22nd International Conference on Security and Cryptography
92
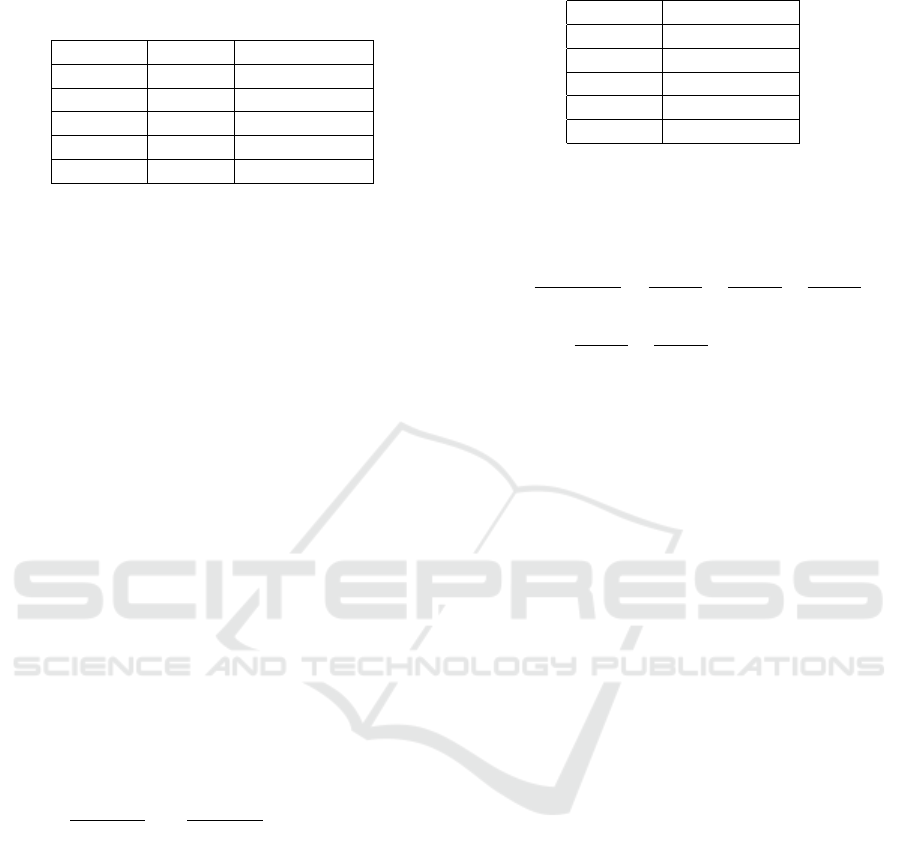
Table 7: Normality test results. The p-value less than the
significance level leads to the rejection of the null hypothe-
sis.
Data p-value test statistic S
CAE 0.001 0.771
VAE 0.002 0.792
Mandelli 0.004 0.817
Kirchner 0.004 0.817
Luk
´
as 0.004 0.817
The critical values for a population consisting of
17 samples is S
c
= 0.892. To assume compliance with
a normal distribution test, the test statistic S should be
greater than S
c
. However, since S < S
c
for all consid-
ered data, we reject the null hypothesis about the nor-
mality of analyzed data. It is also confirmed by the
p-values, which are much smaller than the considered
significance level. Therefore, for further analysis,
we use the Kruskal–Wallis ANOVA non-parametric
test. The Kruskal-Wallis ANOVA test (also called
the Kruskal-Wallis one-way analysis of variance for
ranks) is an extension of the U Mann-Whitney test to
more than two populations. This test is used to verify
the hypothesis about the insignificance of differences
between the medians of the studied variable in sev-
eral (k > 2) populations (Kruskal and Wallis, 1952;
Kruskal, 1952). Its hypotheses are defined as follows:
• H
0
: Medians θ
1
= θ
2
= . . . = θ
n
of the data are
equal;
• H
1
: Not all medians θ
n
(for n = 1, 2, . . .) of the
data are equal;
The test statistic is calculated as shown in Eq. 15.
H =
12
N(N + 1)
k
∑
i=1
n
j
∑
i=1
R
i j
2
n
j
− 3(N + 1) (15)
where:
• N =
∑
k
j=1
n
j
;
• n
j
– population cardinality (for j = 1, 2, . . . , k),
corresponding to the TP values of the CAE, VAE,
Mandelli, Kirchner, and Luk
´
as;
• R
i j
– ranks assigned to the variable value (i =
1, 2, . . . , n
j
, j = 1, 2, . . . , k).
The statistic has a χ
2
distribution with k − 1 de-
grees of freedom. First of all, let us calculate the
sum of ranks. For N =
∑
k
j=1
n
j
, we have k = 5;
n
1
= n
2
= n
3
= n
4
− n
5
= 17, therefore we obtain:
N = 5 · 17 = 85. The sum of ranks is presented in
Tab. 8.
Table 8: Sum of ranks for the Kruskal–Wallis ANOVA.
Data Sum of rangs
CAE 611.5
VAE 685.0
Mandelli 892.0
Kirchner 782.0
Luk
´
as 684.5
Next, let us calculate the test statistic for the TP
values obtained by the CAE, VAE, Mandelli, Kirch-
ner, and Luk
´
as:
H =
12
85(85 + 1)
·
611.5
2
17
+
685.0
2
17
+
892.0
2
17
+
782.0
2
17
+
684.5
2
17
− 3(85 + 1) = 1.58
Thus, the statistical test value of ANOVA analysis
for the CAE, VAE, Mandelli, Kirchner, and Luk
´
as is
equal to H = 1.58. The critical value of χ
2
distribu-
tion for 4 degrees of freedom is equal to F
c
= 9.49.
Because
F < F
c
,
there is no reason to reject the null hypothesis about
the equality of analyzed medians. Therefore, there
is no statistical difference between the proposed
CAE/VAE, Mandelli, Kirchner, and Luk
´
as. This may
be interpreted that all considered methods follow the
same high identification accuracy.
Summary. The verification of the obtained results
using both MAE, MAPE, and RMSE measures, and
hypotheses verification confirmed that the proposed
CAE and VAE make it possible to identify cameras
based on images with similar accuracy to state-of-the-
art methods. The MAE, MAPE, and RMSE mea-
sures represent small values, thus it may be inter-
preted that differences between each data are negligi-
ble. Also, the hypotheses verification, using Kruskal-
Wallis ANOVA revealed that there is no statistical dif-
ference between the results of the classification of the
proposed method and the literature’s methods, so one
may assume that the classification is at the same level.
6 CONCLUSION
In this paper, we have proposed a method both for
lens aberrations detection, as well individual source
camera identification based on images. The solu-
tion was based on convolutional and variational au-
toencoders. Extensive experimental evaluation con-
ducted on a large number of modern imaging devices
Lens Aberrations Detection and Digital Camera Identification with Convolutional Autoencoders
93

confirmed the high lens aberrations identification ac-
curacy. Moreover, the proposed autoencoders may
be successfully used for digital camera identification.
The experiments, enhanced with statistical analysis,
confirmed the high identification accuracy compared
with state-of-the-art methods. Additionally, experi-
ments revealed that using proposed autoencoders may
even shorten the processing time by up to half.
In future work, we consider an extended autoen-
coder model for increasing the accuracy of lens aber-
ration detection. We are also interested in identifying
different types of aberrations, including dispersion,
coma, and astigmatism.
REFERENCES
(http://hugin.sourceforge.net/). Hugin photo
stitcher.
Baar, T., van Houten, W., and Geradts, Z. J. M. H.
(2012). Camera identification by grouping images
from database, based on shared noise patterns. CoRR,
abs/1207.2641.
Bernacki., J. and Scherer., R. (2023). Imagine dataset: Digi-
tal camera identification image benchmarking dataset.
In Proceedings of the 20th International Conference
on Security and Cryptography - SECRYPT, pages
799–804. INSTICC, SciTePress.
Bondi, L., Baroffio, L., Guera, D., Bestagini, P., Delp,
E. J., and Tubaro, S. (2017). First steps toward cam-
era model identification with convolutional neural net-
works. IEEE Signal Process. Lett., 24(3):259–263.
Claus, D. and Fitzgibbon, A. W. (2005). A rational function
lens distortion model for general cameras. In 2005
IEEE Computer Society Conference on Computer Vi-
sion and Pattern Recognition (CVPR’05), volume 1,
pages 213–219. IEEE.
De Silva, V., Chesnokov, V., and Larkin, D. (2016). A novel
adaptive shading correction algorithm for camera sys-
tems. Electronic Imaging, 28:1–5.
Ding, X., Chen, Y., Tang, Z., and Huang, Y. (2019). Cam-
era identification based on domain knowledge-driven
deep multi-task learning. IEEE Access, 7:25878–
25890.
Goljan, M. and Fridrich, J. (2014). Estimation of lens
distortion correction from single images. In Media
Watermarking, Security, and Forensics 2014, volume
9028, pages 234–246. SPIE.
Goodfellow, I. J., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A. C., and
Bengio, Y. (2014). Generative adversarial nets. In
Ghahramani, Z., Welling, M., Cortes, C., Lawrence,
N. D., and Weinberger, K. Q., editors, Advances in
Neural Information Processing Systems 27: Annual
Conference on Neural Information Processing Sys-
tems 2014, December 8-13 2014, Montreal, Quebec,
Canada, pages 2672–2680.
Goodfellow, I. J., Shlens, J., and Szegedy, C. (2015). Ex-
plaining and harnessing adversarial examples. In
3rd International Conference on Learning Represen-
tations, ICLR 2015, San Diego, CA, USA, May 7-9,
2015, Conference Track Proceedings.
Jiang, X., Wei, S., Zhao, R., Zhao, Y., and Wu, X. (2016).
Camera fingerprint: A new perspective for identifying
user’s identity. CoRR, abs/1610.07728.
Julliand, T., Nozick, V., and Talbot, H. (2016). Image Noise
and Digital Image Forensics, pages 3–17. Springer
International Publishing, Cham.
Kingma, D. P. and Ba, J. L. (2015). Adam: A method for
stochastic gradient descent. In ICLR: international
conference on learning representations, pages 1–15.
ICLR US.
Kirchner, M. and Johnson, C. (2020). SPN-CNN: boost-
ing sensor-based source camera attribution with deep
learning. CoRR, abs/2002.02927.
Kordecki, A., Bal, A., and Palus, H. (2017). Local polyno-
mial model: A new approach to vignetting correction.
In Ninth International Conference on Machine Vision
(ICMV 2016), volume 10341, pages 463–467. SPIE.
Kordecki, A., Palus, H., and Bal, A. (2015). Fast vignetting
reduction method for digital still camera. In 2015 20th
International Conference on Methods and Models in
Automation and Robotics (MMAR), pages 1145–1150.
Kruskal, W. and Wallis, W. (1952). Use of ranks in one-
criterion variance analysis. Journal of the American
Statistical Association, pages 583–621.
Kruskal, W. H. (1952). A Nonparametric test for the Sev-
eral Sample Problem. The Annals of Mathematical
Statistics, 23(4):525 – 540.
Lanh, T. V., Chong, K. S., Emmanuel, S., and Kankanhalli,
M. S. (2007). A survey on digital camera image foren-
sic methods. In 2007 IEEE International Conference
on Multimedia and Expo, pages 16–19.
Lee, S. Y., Cho, H. J., and Lee, H. J. (2017). Method for
vignetting correction of image and apparatus therefor.
US Patent 9,740,958.
Li, R., Li, C., and Guan, Y. (2018). Inference of a compact
representation of sensor fingerprint for source camera
identification. Pattern Recognition, 74:556–567.
Lopez-Fuentes, L., Oliver, G., and Massanet, S. (2015).
Revisiting image vignetting correction by constrained
minimization of log-intensity entropy. In Advances in
Computational Intelligence: 13th International Work-
Conference on Artificial Neural Networks, IWANN
2015, Palma de Mallorca, Spain, June 10-12, 2015.
Proceedings, Part II 13, pages 450–463. Springer.
Luk
´
as, J., Fridrich, J. J., and Goljan, M. (2006). Digital
camera identification from sensor pattern noise. IEEE
Trans. Information Forensics and Security, 1(2):205–
214.
Mandelli, S., Cozzolino, D., Bestagini, P., Verdoliva, L.,
and Tubaro, S. (2020). Cnn-based fast source device
identification. IEEE Signal Process. Lett., 27:1285–
1289.
Marra, F., Gragnaniello, D., and Verdoliva, L. (2018). On
the vulnerability of deep learning to adversarial at-
SECRYPT 2025 - 22nd International Conference on Security and Cryptography
94

tacks for camera model identification. Sig. Proc.: Im-
age Comm., 65:240–248.
Moosavi-Dezfooli, S., Fawzi, A., and Frossard, P. (2016).
Deepfool: A simple and accurate method to fool deep
neural networks. In 2016 IEEE Conference on Com-
puter Vision and Pattern Recognition, CVPR 2016,
Las Vegas, NV, USA, June 27-30, 2016, pages 2574–
2582.
Papernot, N., McDaniel, P. D., Jha, S., Fredrikson, M., Ce-
lik, Z. B., and Swami, A. (2016). The limitations of
deep learning in adversarial settings. In IEEE Euro-
pean Symposium on Security and Privacy, EuroS&P
2016, Saarbr
¨
ucken, Germany, March 21-24, 2016,
pages 372–387.
Park, S.-W. and Hong, K.-S. (2001). Practical ways to cal-
culate camera lens distortion for real-time camera cal-
ibration. Pattern Recognition, 34(6):1199–1206.
Ray, S. (2002). Applied photographic optics. Routledge.
Taspinar, S., Mohanty, M., and Memon, N. D. (2016).
PRNU based source attribution with a collection
of seam-carved images. In 2016 IEEE Interna-
tional Conference on Image Processing, ICIP 2016,
Phoenix, AZ, USA, September 25-28, 2016, pages
156–160.
Tiwari, M. and Gupta, B. (2018). Image features depen-
dant correlation-weighting function for efficient prnu
based source camera identification. Forensic Science
International, 285:111 – 120.
Tuama, A., Comby, F., and Chaumont, M. (2016). Cam-
era model identification with the use of deep convolu-
tional neural networks. In IEEE International Work-
shop on Information Forensics and Security, WIFS
2016, Abu Dhabi, United Arab Emirates, December
4-7, 2016, pages 1–6. IEEE.
Yao, H., Qiao, T., Xu, M., and Zheng, N. (2018). Ro-
bust multi-classifier for camera model identification
based on convolution neural network. IEEE Access,
6:24973–24982.
Lens Aberrations Detection and Digital Camera Identification with Convolutional Autoencoders
95
