
Vehicle Longitudinal Speed Estimation Using 3DOF Localization
Information and Genetic Solver
Reza Ghahremaninejad
1 a
, Kerem Par
1 b
, Ali Ufuk Peker
2 c
and
¨
Omer Konan
1 d
1
ADASTEC, Istanbul, Turkey
2
ADASTEC, Michigan, U.S.A.
Keywords:
Vehicle Velocity Estimation, Longitudinal Velocity Estimation, Genetic Solver, Optimization Problem.
Abstract:
The accurate vehicle longitudinal speed measurement is vital for many sub-modules of current vehicle control
units. Ego velocity estimation in Automated Vehicles (AV) scope is one of the fundamental functionalities
required to properly operate many sub-modules like control, planning, and perception. The current speed
sensors on most commercial vehicles have different precision and failure rates. To mitigate the faulty behavior
of AV modules in vehicle speed sensor failure scenarios, a real-time velocity estimation method can play a
redundant role in the vehicle speed sensor. This work attempts to estimate vehicle longitudinal speed having
3DOF real-time localization data. Considering the vehicle dynamic bicycle model, an objective function is
formulated, and then a genetic solver solves the single objective optimization problem. The validation of the
velocity estimation is discussed by comparing the real-time estimated value with accurate vehicle speed sensor
measurement. Results show an acceptable recall of ego longitudinal velocity for redundancy application.
1 INTRODUCTION
The benefits of Automated Vehicle (AV) applications
have been proven over the past years, and different
AV applications are currently deployed in various re-
gions. One of the core requirements for the success-
ful deployment and operation of AVs is to have robust
and safe AV software and hardware suites. To prop-
erly operate fundamental tasks of AV such as control,
planning, and perception, AV hardware includes sen-
sor suites such as LiDARs, cameras, RADARs, speed
sensors, etc. The expected behavior of the AV highly
depends on the sensor readings, where failure in sens-
ing can cause AV failure. Classifying driving tasks as
mission-critical, the immediate need to mitigate sen-
sor failure scenarios, especially for the Society of Au-
tomotive Engineers (SAE) level-4 and higher Auto-
mated Driving Systems (ADS), gains attention. As
mentioned in (Cassel et al., 2020), SAE level-4 and
higher autonomy level vehicles are expected to detect
the failure and respond autonomously to bring the ve-
hicle into a safe state. A redundant source for sensor
a
https://orcid.org/0000-0003-3766-6319
b
https://orcid.org/0000-0002-0659-6189
c
https://orcid.org/0000-0003-1332-0305
d
https://orcid.org/0009-0003-0909-5114
reading would be of great value in performing such a
failure detection. Equipping AVs with redundant sen-
sors can be a solution despite increasing the cost of
the vehicle hardware. Even though from a safety per-
spective, equipping some AV hardware with redun-
dant units is the best practice, especially if the unit
is an actuator, not a sensor, in some sensor cases, an
estimation of sensor reading can be calculated to en-
able sensor reading failure detection reducing hard-
ware cost by relatively low increase in computation
cost. An example of efforts to address sensor fail-
ures in AV scope can be found in (Matos et al., 2024),
(Safavi et al., 2021), and (Goelles et al., 2020).
Among different sensors, longitudinal speed sen-
sors on today’s commercial vehicles are one of the es-
sential and crucial units. Ego velocity estimation us-
ing Visual Odometer (VO) (Khan and Adnan, 2017),
(Wu et al., 2017) and (Pillai and Leonard, 2017) or Li-
DAR Odometer (LO), (Kwon et al., 2025) and (Clav-
ijo et al., 2022) or using an Inertial Measurement Unit
(IMU), and location displacement data over time is
addressed among researchers (Saadeddin et al., 2014)
and (Wang et al., 2011).
Some researchers consider vehicle motion and dy-
namic models to estimate ego states such as longitu-
dinal speed (Jin et al., 2019). For instance, the au-
thor in (Fazekas et al., 2020) uses GNSS and IMU
222
Ghahremaninejad, R., Par, K., Peker, A. U. and Konan, Ö.
Vehicle Longitudinal Speed Estimation Using 3DOF Localization Information and Genetic Solver.
DOI: 10.5220/0013479700003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 222-227
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

measurements to estimate uncertain parameters ac-
companying wheel encoder sensor readings to cali-
brate wheel encoder odometry for localization pur-
poses. They formulate the system uncertainly iden-
tification as a regression problem. Authors in (Hsu
and Chen, 2012) used 6DOF localization information
and two road angles to identify real-time vehicle dy-
namics. The model can then calculate vehicle states,
including vehicle longitudinal velocity. Similar to the
work of (Hsu and Chen, 2012), localization data is
used in the present work. Rather than estimating a
model uncertainly similar to (Fazekas et al., 2020)
and (Hsu and Chen, 2012) to obtain accurate vehicle
dynamics, the 3DOF localization data here is used to
directly estimate the vehicle longitudinal velocity.
The present work estimates ego vehicle longitu-
dinal velocity using 3DOF localization data: Carte-
sian position X-axis, Y-axis, and rotation around Z-
axis, heading on the map frame. To do so, the ve-
hicle dynamic bicycle model is considered to for-
mulate an optimization problem. The Single Objec-
tive Optimization Problem (SOOP) is later solved by
a Genetic Algorithm (GA)- based solver. A time-
series data set containing vehicle longitudinal sen-
sor measurements and 3DOF localization informa-
tion of KARSAN Autonomous e-ATAK, an 8-meter,
level-4 automated bus, is used for validation. The e-
ATAK, automated by ADASTEC Corp. flowride.ai®
full stack AV software, currently operating in Sta-
vanger, Norway, as a public transportation means for
six hours per day, five days per week, performing an
average of 60 km per day. The data is recorded on-
board using the Flowride® logger, an onboard AV
data recording module (Par et al., 2024). Using 3DOF
localization data, estimated velocity is obtained by
solving the optimization problem. The accuracy of
the estimated value is discussed by comparing results
with vehicle onboard sensor measurement.
The optimization problem formulation is pre-
sented in detail in the following section. Section 3
is dedicated to validating the estimated value over the
e-ATAK dataset. Finally, a conclusion to the present
work and possible extensions are discussed.
2 PROBLEM FORMULATION
AND APPROACH
This section is organized into two subsections. First,
problem formulation is discussed and formulated as
a SOOP. Later, the second subsection presents a GA-
based solver architecture to solve the SOOP.
2.1 Formulation
3DOF real-time localization data is used as measure-
ment and is expressed as < X
loc
(t),Y
loc
(t),θ
loc
(t) >
where X
loc
(t), Y
loc
(t) and θ
loc
(t) are ego vehicle base
frame position on the map frame X-axis and Y-axis
in meter and orientation around Z-axis, heading in
rad respectively. From the vehicle dynamic bicycle
model, to find the same information position on the
map frame, the following equation is realized:
ˆ
X(t) =
dt[V
x
(t)cosθ
loc
(t − dt) −V
y
(t)sin θ
loc
(t − dt)]
+ X
loc
(t − dt)
ˆ
Y (t) =
dt[V
x
(t)sin θ
loc
(t − dt) +V
y
(t)cos θ
loc
(t − dt)]
+Y
loc
(t − dt)
ˆ
θ(t) = dt
˙
ˆ
θ(t) + θ
loc
(t − dt)
(1)
where
ˆ
X(t),
ˆ
Y (t) and
ˆ
θ(t) are the position of the ego
vehicle and its heading on the map frame at time t re-
spectively, considering information position from lo-
calization at time t − dt.
˙
ˆ
θ(t), the heading change rate
is obtained as follows:
˙
ˆ
θ(t) =
aC
f
(δV
x
−V
y
)cos δ +
bC
r
V
y
(C
r
b
2
+C
f
a
2
)cos δ
(2)
In real-time operation, dt is the time difference be-
tween the current time when the last location data is
received and the time stamp of the previous location
data. Having a 40 Hz localization calculation rate
adding delays in the estimation calculation, the fol-
lowing inequality can be expressed: dt > 0.025 sec-
onds.
V
x
(t), V
y
(t) and δ(t) are values to estimate in the
present work, which are ego vehicle longitudinal and
lateral velocities in m/s and front wheel angles in rad
respectively. a and b are vehicle base frame distance
with front and rear axels. C
f
and C
r
are front and rear
tire stiffness. The values of a,b,C
f
and C
r
are pa-
rameters to this problem and are set according to the
KARSAN e-ATAK vehicle. The problem statement is
to find V
x
(t), V
y
(t) and δ(t). Using 3DOF localization
information at t −dt the position information from the
vehicle dynamic bicycle model,
ˆ
X(t),
ˆ
Y (t) and
ˆ
θ(t) is
obtained. Later, comparing with the location data at
time t; X
loc
(t), Y
loc
(t) and θ
loc
(t), an error value can
be calculated as follows:
er
X
(t) = (
ˆ
X(t)− X
loc
(t))
2
er
Y
(t) = (
ˆ
Y (t) −Y
loc
(t))
2
er
θ
(t) = (
ˆ
θ(t) − θ
loc
(t))
2
(3)
Vehicle Longitudinal Speed Estimation Using 3DOF Localization Information and Genetic Solver
223
Theoretically considering localization error ne-
glectable, a right estimation of values for V
x
(t), V
y
(t)
and δ(t) would minimize summation of the errors. To
that end, an objective function can be constructed us-
ing weighted summation of errors as follows:
minf = w
x
er
X
(t) + w
y
er
Y
(t) + w
θ
er
θ
(t)
(4)
2.2 Approach
GA-based method to solve SOOP is a common
practice among researchers (Katoch et al., 2021).
To minimize equation (4), by estimating right so-
lution vector, S =< V
x
(t),V
y
(t),δ(t) >, the fol-
lowing chromosome vector is defined: ch
n
=<
V
xn
,V
yn
,δ
n
, f it
n
>. A container vector holding a ran-
domly generated chromosome population is defined
as pop =< ch
1
,ch
2
,...,ch
P
s
>. The random chromo-
some is generated by assigning uniform random val-
ues between the minimum and maximum values of
each gene:
• min
vx
< V
x
< max
vx
• min
vy
< V
y
< max
vy
• min
δ
< δ < max
δ
First, at the beginning of the solving approach, an
initial pop set with the size of P
s
is generated with
random genes, then the fitness score for each chro-
mosome is calculated according to equations (1) to
(4). Half of the best chromosomes with lower fitness
values will be selected later, and the rest will be re-
moved from pop set, resulting in a set with a size
of P
s
/2 ready for cross-over and mutation operation.
In cross-over, two random chromosomes are selected
form pop as parents: ch
k
,ch
j
∈ pop to offspring child
chromosome as follows:
ch
child
=< αV
xk
+ βV
x j
,
αV
yk
+ βV
y j
,
αδ
k
+ βδ
j
>
(5)
where α is a random value between 0 and 1 and
β = 1 − α. The ch
child
then will be added to the
pop set. The cross-over operation continues till the
size of pop reaches P
s
, meaning the iteration count
for the cross-over operation is equal to P
s
/2. A mu-
tation operation will be performed on pop as a fi-
nal GA operation. Random values of γ
x
,γ
y
and γ
δ
where γ
x,min
< γ
x
< γ
x,max
, γ
y,min
< γ
y
< γ
y,max
and
γ
δ,min
< γ
δ
< γ
δ,max
will be added to V
xl
, V
yl
and δ
l
of
ch
l
∈ pop if σ < M where σ is random value between
0 and 1 and M is mutation rate which is parameter
to mutation operator. This will finalize one genetic
population evaluation step. The number of Genetic
Evaluation iteration GE, M, P
s
, min
vx
, min
vy
, min
δ
,
max
vx
, max
vy
, max
δ
, w
x
, w
y
and w
θ
are parameters to
presented method and will be discussed in the evalu-
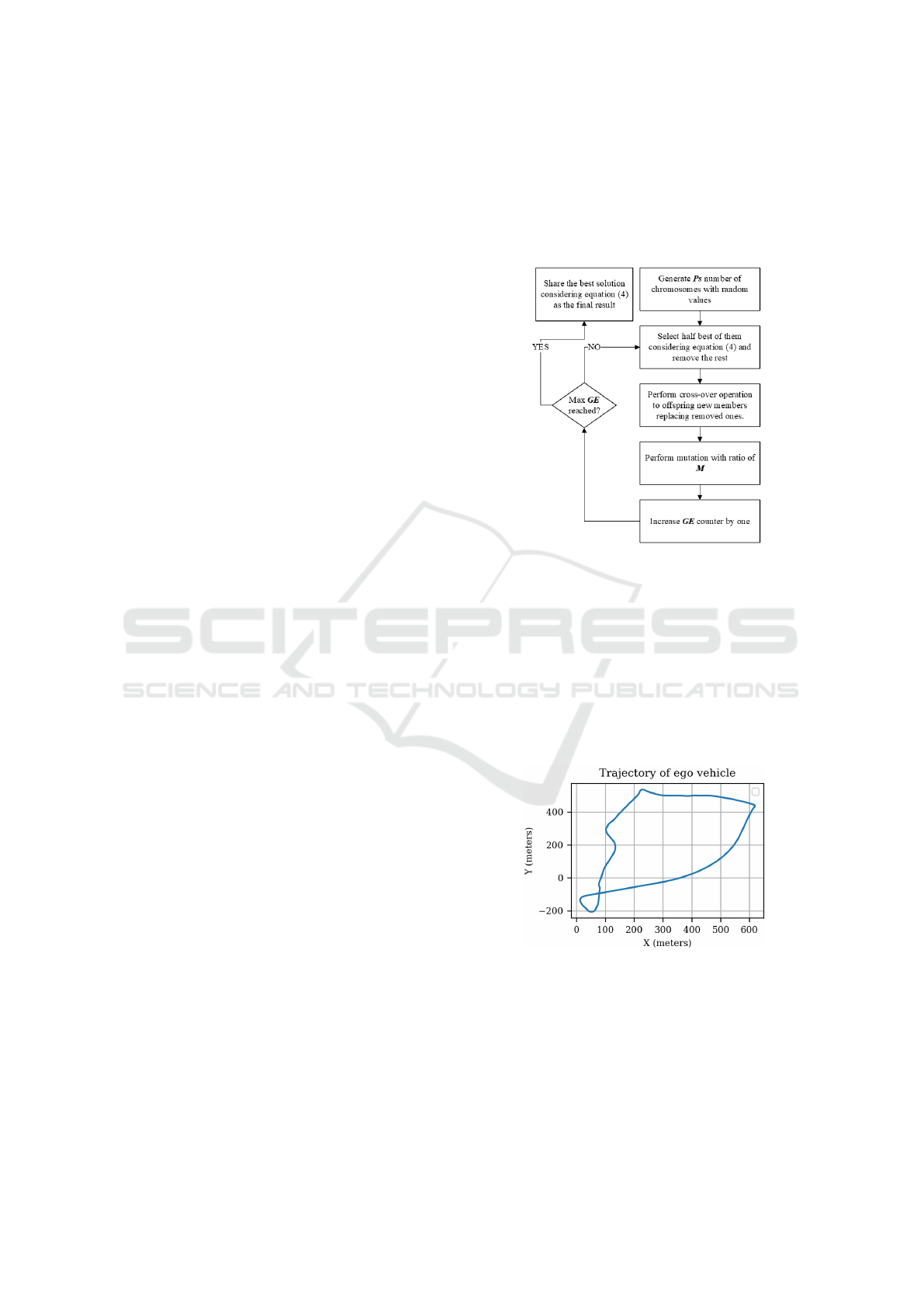
ation step in details. Figure 1 summarizes the genetic
population evaluation cycle.
Figure 1: GA solver to estimate V
x
,V
y
and δ.
3 RESULTS AND VALIDATION
DISCUSSION
To validate the formulation and GA solver, one of the
logged data of the e-ATAK automated bus operating
at Stavanger, Norway, is used. Figures 2, 3, and 4 rep-
resent ego vehicles’ trajectory on map frame in me-
ters, heading in rad, and velocity in m/s.
Figure 2: Ego vehicle trajectory from localization.
Table 1 presents parameters with constant values
selected experimentally to present here. Results for
different values of P
s
and GE are presented to study
the GA solver performance in real-time considering
experiment hardware configuration. Table 2 shows
details of the experiment computer for reference. In
real-time operation, increasing P
s
and GE increases
GA solver computation load resulting in increasing
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
224
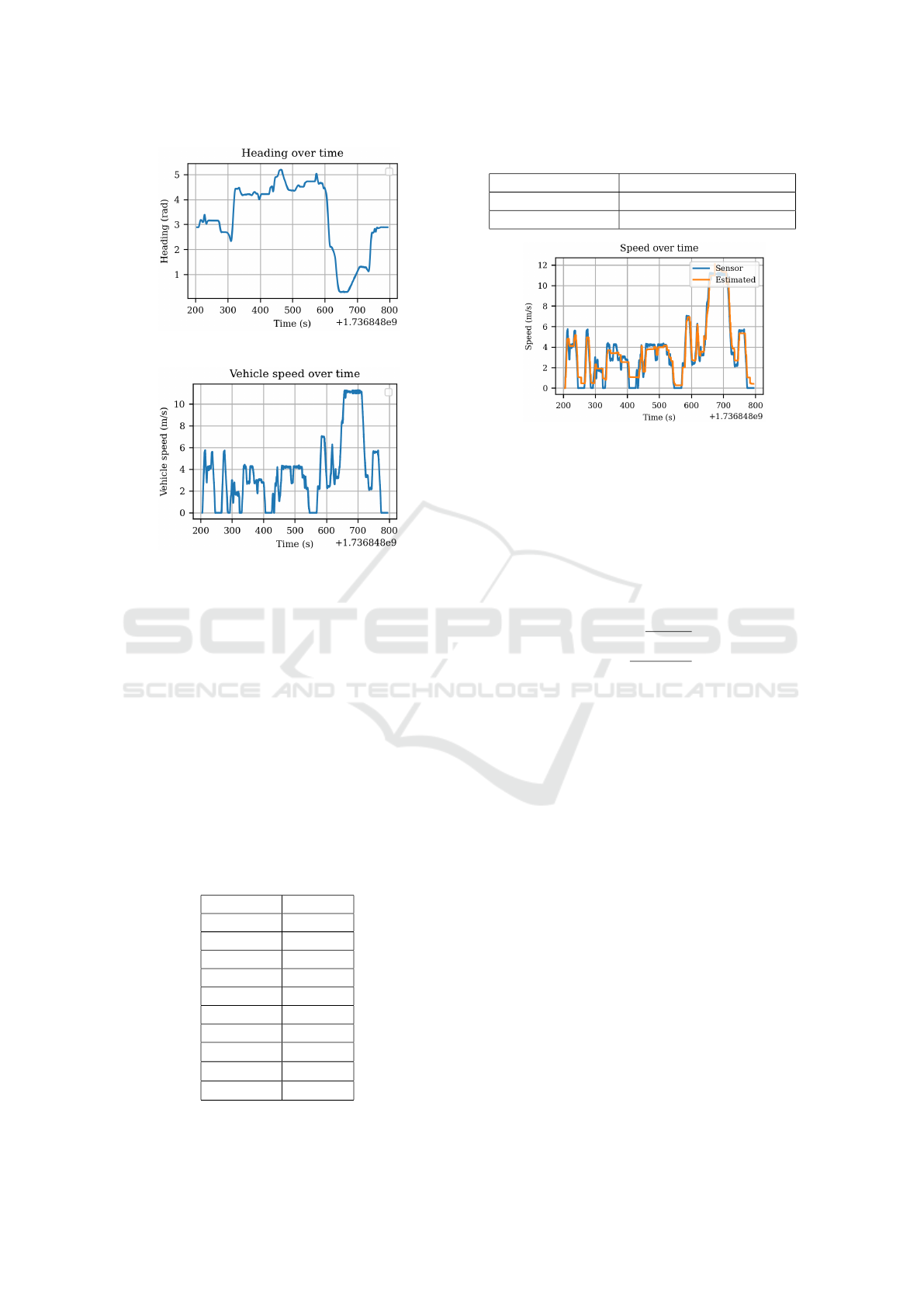
Figure 3: Ego vehicle heading.
Figure 4: Ego vehicle speed.
evaluation execution time. On the other hand, in-
creasing P
s
and GE will result in better estimation of
the V
x
, V
y
and δ
x
. Figure 5 shows the comparison of
vehicle longitudinal velocity measured from the sen-
sor versus the estimated values where P
s
= 800 and
GE = 200 as example. Tables 3, 4 and 5 show result
of all experiments with different GE = 100,200, 400
and P
s
= 400,800, 1200. The success of each configu-
ration is measured by the calculation of absolute error
of estimated value compared with sensor reading in
the form of error recall at < 0.5m/s, < 1m/s, < 2m/s
and < 5m/s: r@0.5, r@1, r@2 and r@5. Average
Execution Time (AET) for each GE step is also noted
in ms to assess the performance of each configuration
in real-time application.
Table 1: Constant parameters for the present experiment.
Parameter Value
M 0.01
min
vx
-3 m/s
min
vy
-1.5 m/s
min
δ
-0.5 rad
max
vx
18 m/s
max
vy
9 m/s
max
δ
0.5 rad
w
x
10
6
w
y
10
6
w
θ
10
4
Table 2: The experiment computer configuration.
Operating System Ubuntu 20.04 LTS
CPU Core i7, 8th Gen, 12-core
RAM 16 GByte DDR4
Figure 5: Ego vehicle estimated speed versus measured
speed from the sensor.
The calculated longitudinal velocity from Dis-
placement Over Time (DOT) is compared with the
proposed method. Displacement over two consecu-
tive localization data obtained as follows:
d
x
= X
loc
(t) − X
loc
(t − dt)
d
y
= Y
loc
(t) −Y
loc
(t − dt)
(6)
Then, for ego longitudinal velocity:
V
x
=
q
d
2
x
+ d
2
y
dt
(7)
Figure 6 shows the calculated speed using DOT
versus sensor readings. DOT’s highly noisy veloc-
ity estimation can be addressed using low-pass filters
such as the Moving Average Filter (MAF). The effect
of MAF with different window sizes is also shown,
which indicates improving the speed estimation; how-
ever, low pass filters such as MAF impose latency on
the measurement. Having 40 Hz localization data, the
time difference between two consecutive location data
will be 25 ms. The latency introduced by MAF with
window size of w will be 25w/2 ms (Smith, 1997).
Table 6 constructed for DOT results with different
MAF windows. Instead of AET, the latency intro-
duced by MAF is indicated to assess real-time appli-
cation performance.
Different approaches could be selected from the
results shown in Tables 3 to 6 considering the prime
objective of this work, to provide redundancy to vehi-
cle speed sensors. This selection will depend on more
details of the ADS module’s ego vehicle speed ac-
curacy requirement from being close enough to real-
time and tolerable deviation from real velocity per-
spectives. For instance, in ADS with a 10 Hz per-
ception rate, latencies and AETs around 100 ms can
Vehicle Longitudinal Speed Estimation Using 3DOF Localization Information and Genetic Solver
225
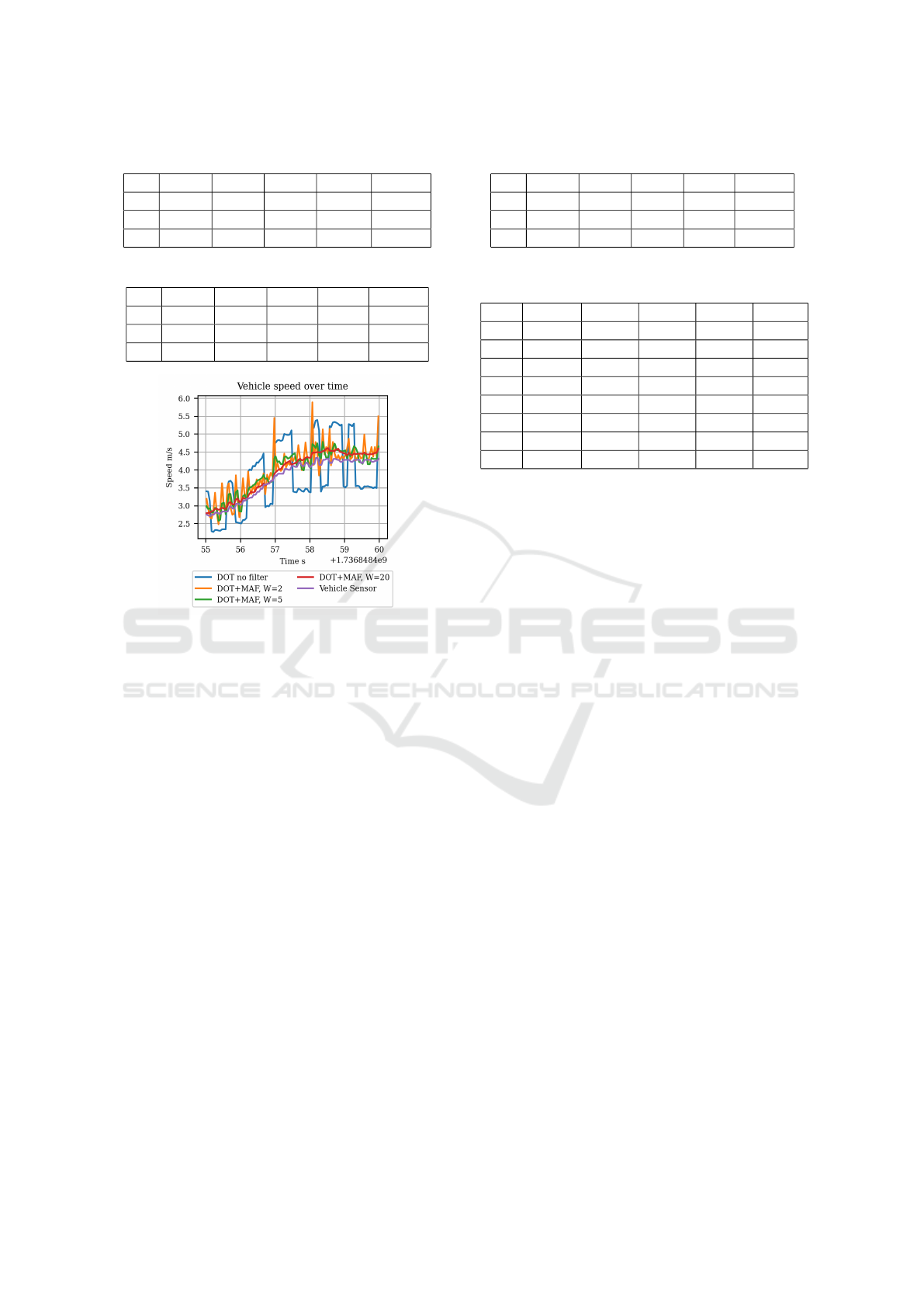
Table 3: The experiment result with P
s
= 400.
GE r@0.5 r@1 r@2 r@5 AETms
100 4.2% 22.2% 42.7% 84.7% 17.9
200 13.2% 29% 61.1% 100% 32.8
400 51.1% 83% 100% 100% 67
Table 4: The experiment result with P
s
= 800.
GE r@0.5 r@1 r@2 r@5 AETms
100 19.9% 37% 79% 100% 36.1
200 54.4% 80.1% 100% 100% 66.9
400 98.6% 99.9% 100% 100% 129.6
Figure 6: Ego vehicle calculated velocity using DOT with
different windows size of MAF.
be considered acceptable. Based on this assump-
tion, configurations at Table 4 with P
s
= 800 and
GE = 400, Table 5 with P
s
= 1200 and GE = 200,
also Table 6, using DOT with window size of 10 can
be good candidates. The best performance belongs
to configuration with P
s
= 1200 and GE = 400, Ta-
ble 5. The closest DOT accuracy is obtained with
a window size of 20, which has less r@0.5 and the
worst time performance. It is worth mentioning that
the AET highly depends on computing configuration
and can be improved with better hardware and soft-
ware implementation. However, the latency imposed
by MAF when using the DOT method is independent
of computation resources.
4 CONCLUSION
The present work attempts to estimate vehicle lon-
gitudinal speed mainly to mitigate speed sensor fail-
ure cases, especially in the SAE level-4 ADS scope,
which requires ADS to detect failures and perform
fail-over maneuvers. To do so, a redundant veloc-
ity estimation method, which uses 3DOF localiza-
tion data, is proposed. Ego longitudinal velocity is
Table 5: The experiment result with P
s
= 1200.
GE r@0.5 r@1 r@2 r@5 AETms
100 29.9% 64.3% 97.3% 100% 49.9
200 89.3% 99.9% 100% 100% 102
400 99.2% 100% 100% 100% 201.9
Table 6: DOT raw results and MAF output with different
windows size.
win r@0.5 r@1 r@2 r@5 lat ms
1 38% 74% 93% 100% 0
2 89% 97% 99% 100% 25
5 90% 98% 100% 100% 62.5
10 93% 99% 100% 100% 125
20 92% 100% 100% 100% 250
50 86% 100% 100% 100% 625
100 69% 97% 100% 100% 1250
200 55% 80% 99% 100% 2500
estimated using a GA-based optimizer by solving a
SOOP formulated considering the vehicle dynamic
bicycle model. Different configurations of initial pop-
ulation and generation evaluation steps resulted in
various performances of the method in real-time op-
eration from execution time and the accuracy of esti-
mation perspective. Estimation accuracy is measured
by comparing it to the e-ATAK automated bus speed
sensor. The DOT-based approach for vehicle longi-
tudinal speed calculation is also presented to discuss
the GA performance better, where the velocity calcu-
lation results improved using MAF. Different MAF
window sizes were practiced, which validated the su-
periority of the proposed method compared to the re-
sults of DOT combined with MAF.
The formulation of the current work does not con-
sider the accuracy of localization data. However, the
deviation in the localization information can be in-
cluded in formulating the objective function. Also,
the present work does not study different implemen-
tations and configurations of cross-over and mutation
operations. The effect of varying hardware configu-
rations on the proposed method’s performance is also
not addressed in this work. All mentioned topics can
be an extension of the present work. Adding other
measurements next to 3DOF localization information
and using other vehicle dynamic models in problem
formulation can also be different extensions of this
work.
ACKNOWLEDGEMENTS
This work results from collaborative effort and pas-
sion within the ADASTEC Corp. family.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
226

REFERENCES
Cassel, A., Bergenhem, C., Christensen, O. M., Heyn, H.-
M., Leadersson-Olsson, S., Majdandzic, M., Sun, P.,
Thors
´
en, A., and Trygvesson, J. (2020). On percep-
tion safety requirements and multi sensor systems for
automated driving systems. SAE International Jour-
nal of Advances and Current Practices in Mobility,
2(2020-01-0101):3035–3043.
Clavijo, M., Jim
´
enez, F., Serradilla, F., and D
´
ıaz-
´
Alvarez,
A. (2022). Assessment of cnn-based models for
odometry estimation methods with lidar. Mathemat-
ics, 10(18):3234.
Fazekas, M., G
´
asp
´
ar, P., and N
´
emeth, B. (2020). Identifica-
tion of kinematic vehicle model parameters for local-
ization purposes. In 2020 IEEE International Confer-
ence on Multisensor Fusion and Integration for Intel-
ligent Systems (MFI), pages 373–380. IEEE.
Goelles, T., Schlager, B., and Muckenhuber, S. (2020).
Fault detection, isolation, identification and recovery
(fdiir) methods for automotive perception sensors in-
cluding a detailed literature survey for lidar. Sensors,
20(13):3662.
Hsu, L.-Y. and Chen, T.-L. (2012). Vehicle dynamic predic-
tion systems with on-line identification of vehicle pa-
rameters and road conditions. Sensors, 12(11):15778–
15800.
Jin, X., Yin, G., and Chen, N. (2019). Advanced estima-
tion techniques for vehicle system dynamic state: A
survey. Sensors, 19(19):4289.
Katoch, S., Chauhan, S. S., and Kumar, V. (2021). A re-
view on genetic algorithm: past, present, and future.
Multimedia tools and applications, 80:8091–8126.
Khan, N. H. and Adnan, A. (2017). Ego-motion estimation
concepts, algorithms and challenges: an overview.
Multimedia Tools and Applications, 76:16581–16603.
Kwon, W., Lee, H., Kim, A., and Yi, K. (2025). Lidar-based
odometry estimation using wheel speed and vehicle
model for autonomous buses. International Journal
of Control, Automation, and Systems, 23(1):41–54.
Matos, F., Bernardino, J., Dur
˜
aes, J., and Cunha, J. (2024).
A survey on sensor failures in autonomous vehicles:
Challenges and solutions. Sensors, 24(16):5108.
Par, K., Peker, A. U., Ghahremaninejad, R.,
¨
Ozcan, A., and
Sahin, E. (2024). Introducing flowride® logger, an on-
board data collection framework for commercial auto-
mated vehicles. In VEHITS, pages 488–495.
Pillai, S. and Leonard, J. J. (2017). Towards visual ego-
motion learning in robots. In 2017 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS), pages 5533–5540. IEEE.
Saadeddin, K., Abdel-Hafez, M. F., and Jarrah, M. A.
(2014). Estimating vehicle state by gps/imu fusion
with vehicle dynamics. Journal of Intelligent &
Robotic Systems, 74:147–172.
Safavi, S., Safavi, M. A., Hamid, H., and Fallah, S. (2021).
Multi-sensor fault detection, identification, isolation
and health forecasting for autonomous vehicles. Sen-
sors, 21(7):2547.
Smith, S. W. (1997). The scientist and engineer’s guide to
digital signal processing. California Technical Pub.
Wang, Y., Mangnus, J., Kosti
´
c, D., Nijmeijer, H., and
Jansen, S. T. (2011). Vehicle state estimation using
GPS/IMU integration. IEEE.
Wu, M., Lam, S.-K., and Srikanthan, T. (2017). A frame-
work for fast and robust visual odometry. IEEE
Transactions on Intelligent Transportation Systems,
18(12):3433–3448.
Vehicle Longitudinal Speed Estimation Using 3DOF Localization Information and Genetic Solver
227
