
Quality and Trust Indicators of Digital Road Infrastructure Data Are
Essential to Improve Its Usability: An Intelligent Speed Assist (ISA)
Study
Jacco van de Sluis
1 a
, Daniel Altgassen
2 b
and Peter-Paul Schackmann
1
1
Networks department, TNO - ICT, Strategy & Policy, The Hague, The Netherlands
2
Integrated Vehicle Safety Department, TNO - Mobility & Build Environment, Helmond, The Netherlands
Keywords:
Intelligent Speed Assist (ISA), Misbehaviour Detection and Reporting (MBD&R), Digital Road Infrastructure
(DRI), Vehicle-to-Everything (V2X) Communication, Intelligent Transport Systems (ITS), Data Trust, Data
Quality, Cooperative Connected and Automated Mobility (CCAM), Advanced Driver Assistance System
(ADAS), Automated Driving System (ADS).
Abstract:
The promise of a Digital Road Infrastructure (DRI) is to improve both road and vehicle safety. ADAS/ADS
with DRI support, can help vehicles in overcoming certain sensor limitations, handle more complex opera-
tional situations and offer additional situational awareness. An effective DRI must be trusted and must offer
the required data quality, both are currently lacking. Intelligent Speed Assist (ISA) is an interesting show case
for the added value of DRI. In our approach camera-based traffic sign detections and map-based speed limit
information, both occasionally wrong, are augmented with actual speed limit and road layout information
coming from DRI. A Misbehaviour Detection and Reporting (MBD&R) concept tailored to the ISA sources
is deployed in the vehicle to detect and report ISA related misbehaviour. Trust and quality indicators are
calculated for data coming from camera, map and DRI, which are used to verify and compare theses sources
and make improved ISA speed limit decisions. The vehicle implementation is tested under real-life traffic
conditions. Our work is a first step in realizing a trusted DRI. The long-term goal is collaboration among all
stakeholders to implement mechanisms that improve trust and the quality of shared data sources for use in
traffic safety applications.
1 INTRODUCTION
Connected, Cooperative, and Automated Mobility
(CCAM) applications can improve the performance
of existing Advanced Driver Assistance Systems
(ADAS) / Automated Driving Systems (ADS). These
new data-driven services enabled by connectivity can
increase vehicle intelligence, achieve higher levels
of automation and improve safety, see reports from
(Farah et al., 2018) and (OECD, 2023). But to work in
practice, a trusted and shared Digital Road Infrastruc-
ture (DRI) is essential. With numerous components
required to make this possible, it is crucial that vehicle
OEMs, industry partners, service providers, and road
operators collaborate to enhance both road and vehi-
cle safety. An effective DRI offers trusted sources and
offers the required data quality, both of which are cur-
a
https://orcid.org/0000-0002-7162-6014
b
https://orcid.org/0009-0003-2813-0499
rently lacking. As our mobility system prepares for
vehicles with higher levels of automation, the need
for a reliable DRI increases. Information generated
by road operators, road users or other data providers -
and shared with specific road users - can greatly con-
tribute to that goal. From a vehicle perspective, us-
ing external data, on top of the vehicles’ own sensor
data can significantly extend the vehicle operational
horizon and thereby improve vehicle safety (Zhang
et al., 2022). Despite DRI potential benefits, the us-
ability of external digital data for safety applications
is low, due to concerns about reliability (quality and
trust) and possible misbehaviours, see (van der Heij-
den et al., 2019) and (Kamel et al., 2020). Also road
operators and data providers are unsure of the specific
data requirements needed and how to provide these.
To move forward, cross-chain collaboration between
all stakeholders is required, as well as proof that qual-
ity and trust issues can be resolved. This paper uses
the Intelligent Speed Assist (ISA) as study case to fur-
van de Sluis, J., Altgassen, D. and Schackmann, P.-P.
Quality and Trust Indicators of Digital Road Infrastructure Data Are Essential to Improve Its Usability: An Intelligent Speed Assist (ISA) Study.
DOI: 10.5220/0013470100003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 631-637
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
631
ther describe the challenges and to introduce possible
solutions.
2 IMPROVING SHARED DATA
USABILITY FOR ISA
Real-time traffic information data is often only used to
inform drivers. In these systems, the driver is respon-
sible for safe driving behavior and occasional misin-
formation is of lesser criticality, as it is handled by
human interpretations. The urgency to decrease mis-
information has recently grown, as the same data is
now also being used for traffic and road safety ap-
plications, such as usage in ADAS. This develop-
ment increases the importance of the detection of mis-
behaviour and having a real-time measure for data
quality and data trust. To properly scale ADAS and
achieve higher levels of automation, relying solely
on ego vehicle sensor data is challenging. Especially
when operational design domains extend and become
more complex, e.g. by covering (sub)urban environ-
ments, diverse road and weather conditions. Cur-
rent ISA vehicle implementations often use a camera
to recognize speed limit signs, combined with map
data to determine the applicable speed limit. How-
ever, camera-based detection can have (limitation)
signs that are obstructed, misinterpreted, or affected
by weather conditions. Additionally, map data can be
inaccurate, insufficiently detailed (e.g. missing infor-
mation related to: time-of-day, vehicle-type, weather
conditions), or outdated. These sensor and map flaws
can lead to unsafe situations, such as speeding or un-
expected braking, especially when used by automated
vehicle systems. The EU 2019/2144 ISA regulation
(EC, 2023) makes ISA mandatory in new vehicles. It
does not constrain manufacturers by specifying which
sources to use for speed limit data, but it outlines per-
formance requirements and implementation possibil-
ities. The additional use of digital road infrastruc-
ture (DRI) data can provide the technical solution to
achieve the required ISA performance.
2.1 Misbehaviour Detection
But with increased connectivity, cyber-security be-
comes more apparent. Cyber-attacks and misbe-
haviour are not limited to the connected vehicles, they
need to be considered within the full CCAM ecosys-
tem. The ISA use case is a complex example of a
cyber-physical system-of-systems, attacks and misbe-
haviours can be considered at vehicle level, within
the DRI and data sharing environments. For that
reason, it is important to have Misbehaviour Detec-
Misbehaviour Detection System (@ Vehicle; RSU), Central
Event CategorizationDetectors
F4
F3
F2
Inputs
F1
Alg. 1
Alg. 2
Alg. N
...
FN
Misbehaviour Reporting System (@ Vehicle; RSU, Central)
Decision Generation Transmission
Backend Misbehaviour Management (@ Central Authority)
Revocation Misbehaviour AnalysisDissemination
Security Protocols
Protect
Detect
Respond
Perception
Communication
Report
HD Map +
Localization
IVIM
CAM
CPM
DENM
Trust Score
Report
Intelligent Speed Assistance
Quality
Score
Speed Set Point
Figure 1: MBD&R high-level architecture.
tion (MBD) functionalities available at all these levels
(5GAA, 2022). For the mitigation strategy, it is neces-
sary to have Misbehaviour Reporting Systems (MRS)
to exchange misbehaviour information between rele-
vant entities in the CCAM ecosystem (ETSI, 2023), as
part of the response and recovery steps. A basic Mis-
behaviour Detection and Reporting (MBD&R) setup
is illustrated in Fig. 1. This generic architecture is
taken from our previous work (Oliveira, 2024), which
is also based on the guidelines described in the Mis-
behaviour Detection white paper from the 5GAA Au-
tomotive Association (5GAA, 2022). In-vehicle mis-
behaviour detectors are deployed to check incoming
sensor data and communicated data from DRI, before
its usage in ISA. MRS functions are in place to report
and share detected misbehaviours across the CCAM
ecosystem.
2.2 Data Trust and Data Quality
Standards and trust mechanisms are essential build-
ing blocks to fully realize smart mobility benefits.
With the European Union C-ITS Security Credential
Management System policies (EC, 2018), the EU has
established a European Trust Domain that provides
electronic signatures to ensure origin and integrity of
data (ETSI, 2021). This electronic signature indi-
cates that the shared data has not been changed or
tampered with and that it is from a trusted source.
With this, vehicles can recognize trusted data sources
which is crucial in the assessment of the reliabil-
ity of shared information. This is an important first
step, but it is not enough to create a trusted DRI. En-
surance of the right data quality level is crucial as
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
632

well. Even when data providers are trusted, the data
itself can still be flawed, with errors such as incor-
rect signals or outdated information. Our proposed
solution for this is a Misbehaviour Detection (MBD)
concept to help identify such issues by comparing
multiple data sources and using historical patterns.
Data quality from different sources is operationally
assessed through data sanity checks and comparisons
across these sources. Having both quality and trust
metrics enables the ADAS/ADS system to make in-
formed decisions based on the shared data. The Mis-
behaviour Detection mechanisms can also be used to
report suspected faulty data back to the source, allow-
ing that party to make improvements and thus contin-
uously enhance data quality. The requirements and
complexity of trust and MBD algorithms depend on
the required safety levels. For vehicle systems, in-
creasing levels of automation, means reliability and
data quality become more critical.
3 ISA USE CASE WITH DRI
SUPPORT
In the Digital Infrastructure for Future-proof Mobil-
ity project (DITM, 2022), digital infrastructure for
automated transport solutions are being implemented
into validation labs. ISA supported by DRI is an
important use case of the validation labs. In DITM
MBD&R functions are being developed and imple-
mented at vehicle, roadside and central level. The ve-
hicle deployments use TNO carlabs to evaluate the
ISA MBD&R system under real-life conditions at
public roads. These carlabs are our CCAM research
facilities consisting of regular production vehicles
equipped with relevant retrofitted hardware and soft-
ware to enable experimental automated driving appli-
cations. The systems and software are under our own
control and include sensor-sets (camera, radar, lidar,
etc.), wireless communications (ITS-G5, C-V2X, 5G
cellular, UWB, etc.), our ADAS/ADS driving stack
(perception, localization, sensor-fusion, drive plan-
ning, vehicle control, etc.), human-machine interface
(HMI, e.g. for warnings, handing over of control).
In the remaining part of the paper the focus is on
these in-vehicle MBD functions. A generic approach
is used that scales with available sensor-suite, sup-
ports different data sources as multiple types of ap-
plications (traffic safety, ADAS/ADS or other CCAM
like applications). Fig. 2 shows a generic sensor set
and data sources suitable for use in ISA:
• A GNSS data source used for positioning. The
GNSS source can also be used as one of several
inputs of a multi-source localization function that
Figure 2: MBD&R example for ISA: vehicle sensors and
data sources.
enables lane-level accuracy.
• On-board cameras, as part of the perception sys-
tem, are used for Traffic Sign Recognition (TSR)
of (static) traffic signs and possibly overhead vari-
able message signs (VMS). Also other camera
image-based functions can be of interest, for ex-
ample line-detection for lane-level accurate ISA.
• (Dynamic) cloud data is used as a collection
term for all kinds of real-time traffic informa-
tion (RTTI) services, from a multitude of service
providers, here specifically those providing speed
limits.
• (HD) Map services, next to static (offline) map
information, can include real-time map updates,
offering new layers of information suited for
ADAS/ADS functionality, such as speed limits for
ISA.
• V2X communication and connected services re-
lated to RTTI-type of data. For ISA the In-
Vehicle Information Message (IVIM), (ISO/TC-
204, 2020) is of special interest. The IVIM of-
fers speed limit and road layout information and
is normally provided by an authorized Road Op-
erator (RO).
Within our generic approach, every relevant ISA sen-
sor can be extended with MBD functionality. In
Fig. 2 the green detector blocks are specifically de-
signed for their sensor, i.e. for handling a specific
data type. Detector functions perform basic checks
on system health and status; data quality and trust
validation (consistency, integrity, plausibility, timing,
etc.); and expected misbehaviours. These individual
MB-detectors are connected to a central in-vehicle
MBD&R block that compares sensor data and cal-
culates related trust scores, calculates data quality
scores, collects evidence of misbehaviour and uses
this information for filing MBD-reports. Based on
this central assessment, the speed limit data is used or
dismissed by the ISA application and detected misbe-
haviour is reported back to the providing sources. The
Quality and Trust Indicators of Digital Road Infrastructure Data Are Essential to Improve Its Usability: An Intelligent Speed Assist (ISA)
Study
633

latter facilitates the improvement of the data sources
and enhances overall system reliability.
4 VEHICLE IMPLEMENTATIONS
This section provides more detailed information on
the ISA use case and related vehicle implementations
within the DITM project. The developed concept de-
sign is being implemented into real vehicles (TNO
carlabs) and DRI-elements are deployed and used for
ISA testing under real-life conditions.
4.1 Misbehaviour Detectors
The in-vehicle MBD&R functions are depicted in
Fig. 3 and are divided into two main blocks:
• On-board Unit (OBU) stack: this is part of the
V2X communication system and does checks on
the received data. The low-level communication
function does security checks (V2X-PKI, creden-
tials, integrity), correct forwarding, data consis-
tency check, timing check etc. It can already filter
out untrusted, corrupted messages. Trusted data is
forward into specific MBD and AD functions.
• Automated Driving (AD) stack: this part contains
all in-vehicle AD related functions like sensors,
world model, drive planning and vehicle control.
For ISA it has camera and map MB-detectors and
uses the output coming from the OBU message
detectors. A central function (re-)calculates trust
scores and collects evidence to be used in MBD-
reports. Quality scores are calculated and are used
to determine which speed limit data is used as in-
put for the ISA application.
All received V2X data from DRI elements are pro-
cessed via the ”communication trust” (blue) block of
the OBU stack. This part detects generic communi-
cation misbehaviour with checks possible at all com-
munication layers (ETSI, 2010). The security layer
is the first layer of this detector in which messages
are being assessed based on security-related checks:
trusted source, security profiles, integrity checks, etc.
If the message is not filtered out at this stage, other
checks are performed related to message formats and
structure, consistency and timing checks. If messages
are discarded at this stage, the collected evidence can
be used to file a MB report. For trusted messages,
a trust score is calculated, upon which they are for-
warded to the ITS message detector (red block). The
ITS message detector performs checks based on the
type of message received. For ISA the IVIM is as-
sessed and specific checks on message type, expected
structure, data elements content checks are executed.
Misbehaviour checks are being performed, with spe-
cific interest in road layout information and speed
limit information at road and lane level, to verify if
data are within expected bounds, if data is consistent
over time, etc. The ITS message detector filters out
irrelevant information (for the ISA application) and
forwards the speed limit, road layout information to-
gether with a calculated trust score. In the AD stack,
all in-vehicle related Misbehaviour Detectors are per-
forming similar specific data checks and calculate in-
dividual trust scores. For ISA this are the Camera
Detector and Map Detector (red blocks). First checks
are basic system-related checks to validate healthy
operation, followed by more specific checks on sen-
sor and system data consistency, plausibility, expected
timing of signals, etc. A central block (orange) is pro-
cessing the output from all detectors to calculate an
overall trust score and to collect the evidence for de-
tected misbehaviours, which are being forwarded as
input for potential MB-reporting. In addition, qual-
ity scores are being calculated based on comparing
the different sources (Camera, Map, IVIM) which are
used to determine which speed limit to forward to the
ISA application. The quality score is, again, built-
up of several data-checks (e.g. thresholds), but also
based on comparison of sources, and use of confi-
dence values (if available). In Fig. 3 the green Road
Model block uses these inputs to determine the ap-
plicable speed limit, since ultimately the application
needs a single source-of-truth speed limit to act upon.
4.2 Trust and Quality Score
Calculations
4.2.1 Trust Score
This is a continuation of our work done in (Oliveira,
2024), which already uses trust and quality scores as
part of ISA MBD functionality. A reputation sys-
tem concept is developed targeting all ISA entities, or
nodes (data sources), such as communication chan-
nels, perception systems, possibly other vehicles (via
V2X communication) etc. The used trust scoring con-
cept is based on the theory of reputation scores from
publications of (Michiardi and Molva, 2002), (Lein-
muller et al., 2008) and (Bißmeyer et al., 2012). The
trust scores are intended to track the occurrence of
misbehaviour in each node. A misbehaviour can di-
rectly be linked to a check of a detector, with a detec-
tor covering multiple checks applied in logical rela-
tions. Additionally, the interest is not only in trust at
a specific moment, but more in a historical trust over
a certain window of time. This ensures that false pos-
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
634
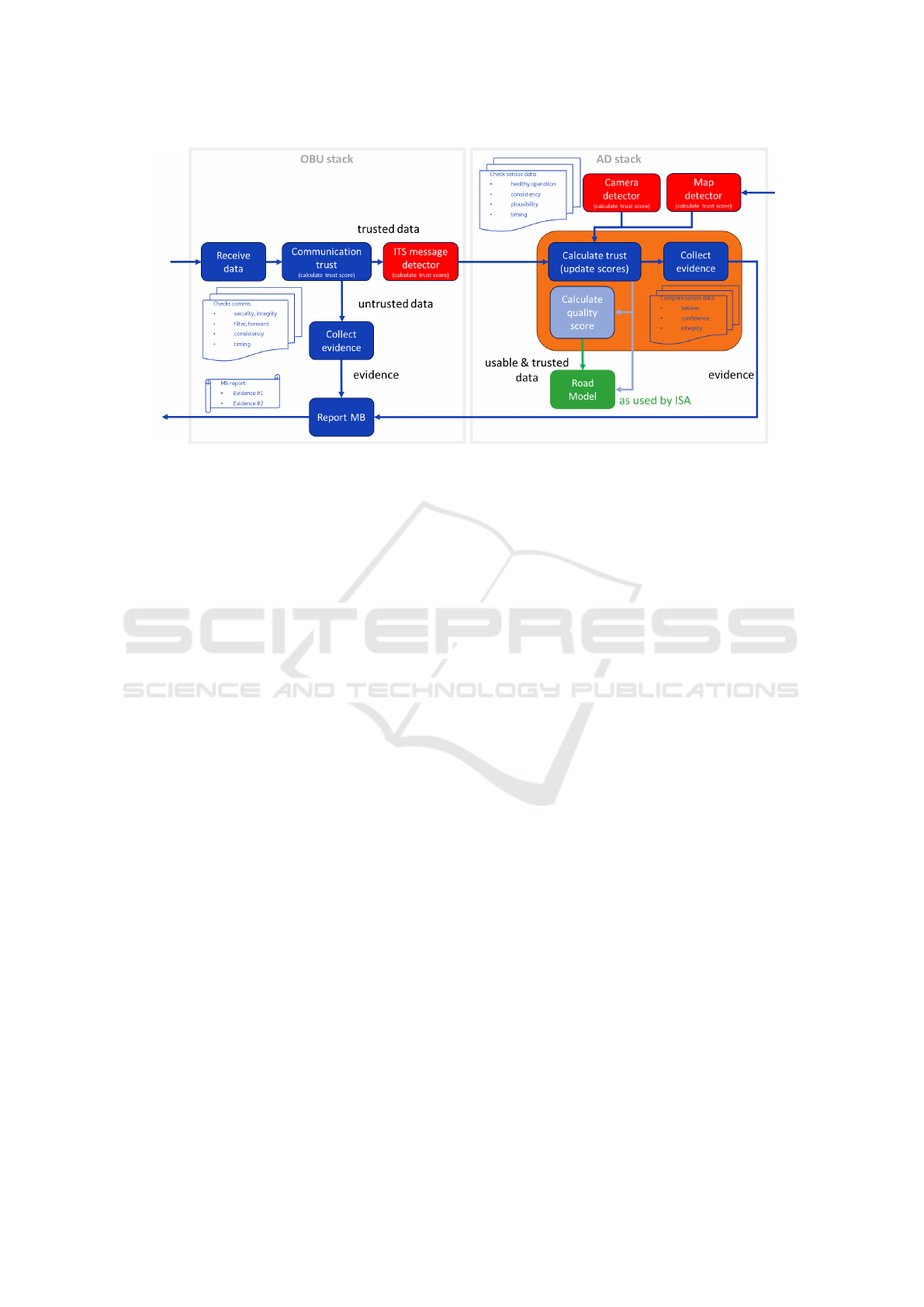
Figure 3: Flow diagram of the in-vehicle MBD&R system.
itives do not suddenly raise the trust value of a node.
For a node to become trustworthy, it needs to perform
correctly for a certain amount of time. Current exten-
sions also include concepts of the Transferable Belief
Model (TBM) (Philippe Smets, 1994). Where TBM
provides a mathematical framework for rational and
evidence-based decision making under various types
of uncertainty. Like for instance inaccurate or dis-
trusted observations, indecisive or missing informa-
tion, or dealing with conflicts in the evidence. Appli-
cation of TBM has several features particularly rele-
vant to the detection and handling of anomalies and
misbehaviour. Evidence can be provided at differ-
ent levels, e.g. the evidence that a sensor is working,
the evidence that the sensor detected a line, and evi-
dence that the sensor recognized a traffic sign, and a
sub-sign, etc. Causality of evidence can be organized
and aggregated in a complex belief model as a logical
network. Our approach is compatible with ongoing
developments covered in (5GAA, 2022) and (5GAA,
2024), which uses concepts like trust relationships,
trust referral and trust network analysis with subjec-
tive logic (J. Audun and Pope, 2006).
4.2.2 Quality Score
The quality scoring is used to evaluate the validity of
the speed limit information for use by the ISA appli-
cation. So, the quality score calculation for a single
source or node is not based on a historical evaluation
of the data. Instead, quality scoring is based on the be-
lief scores of individual sample values available from
individual Misbehaviour Detectors. To recall, for
our ISA example the individual speed limit sources
are TSR data from camera, received IVIM from DRI
and map-based speed limits. The three available iso-
lated belief scores are evaluated and undergo a ”2-
out-of-3” real-time comparison of the available speed
limit values. Depending on the belief scores, de-
fined thresholds, and applied situational weighting,
the most likely speed limit is determined. Situational
weighting implies the option to take into account con-
textual knowledge by the system in computing the be-
lief (e.g. knowledge about the road type the vehicle
is currently on, with the assertion that a speed limit
sign of 30 km/h on a highway is implausible). The
quality score must be recalculated every time one of
the independent sources provides a new speed limit
value. The trust scores are calculated in real-time and
are updated per independent source. For the trust and
quality scores, computational loads and times are ex-
pected to be within acceptable limits, as the detected
speed limit changes over a certain traveled distance
are also limited. In addition, depending on individual
source trust scores or detected misbehaviours, certain
data will be discarded, or an individual source is (tem-
porarily) marked as untrusted.
4.3 Test in Real-Life Conditions
For the ISA use case the MBD&R implementations
are being deployed in our experimental carlab and test
scenarios are executed at the highways surrounding
the city of Eindhoven in The Netherlands. Within the
DITM digital data sharing environment, tooling has
been deployed to share actual IVIMs that match the
local conditions of the roads. It also supports spe-
cific predefined misbehaviour into the IVIMs which
allows for replicable testing. Testing scenarios cover
the local conditions with detected traffic signs, diverse
road and lane layouts, active VMS systems and com-
Quality and Trust Indicators of Digital Road Infrastructure Data Are Essential to Improve Its Usability: An Intelligent Speed Assist (ISA)
Study
635

Figure 4: Illustration of ISA MBD&R testing under real-
life conditions.
mercial map data (as depicted in Fig. 4). All ISA
relevant data is presented to the driver via the vehi-
cle HMI, but the ISA application itself is operated in
open loop, without actuation of speed control, as pub-
lic roads are being used. In addition, all relevant data
will be logged (DRI, vehicles) for post-processing and
further analysis.
4.4 Expected Results
The ISA MBD&R functions, with trust and qual-
ity scoring methods, are currently being implemented
into our carlab. Testing for verification at vehicle level
is planned for early 2025. Thereafter real-life val-
idation can start at the highways surrounding Eind-
hoven. Relevant data will be collected for analysis
of ISA performance including speed limit informa-
tion from: maps (static and dynamic); available traf-
fic signs (static signs, VMS); and lane-specific speed
limits from IVIMs. The validation data will also be
used for further improving the MBD functionality, for
example tuning the individual misbehavior detectors
and quality and trust scoring methods. Expected is
that having our MBD&R implementation deployed
will improve the performance of ISA application be-
cause of:
• the IVIM exchange via DRI offers an additional
source of ISA information.
• certain misbehaviours can now be detected.
• data sources can be identified as trusted.
• data quality and trust scores can improve usability
of the data for ISA and thus improve ISA speed
limit selections.
5 CONCLUSIONS
Current ADAS/ADS, like an ISA application can be
improved with the support of DRI. Concerns about
quality and trust in data must be addressed to fully re-
alize the benefits of smart mobility. Our MBD&R im-
plementation for ISA, with cross-verifying data from
cameras, maps and extended with DRI sources, can
be a first step in realizing such a trusted CCAM en-
vironment. This is done with ISA sources and data
identified as trusted (or untrusted) and the detection
and reporting of misbehaviours. Furthermore, with
data quality and trust scores to improve data usability
and speed limit selections for ISA. Future work in-
volves the execution of the real-life testing, scaling up
with other sensors and including other sources com-
ing from DRI. Doing more specific MBD scenario
testing, for instance by incorporating lane-specific
rules. The test results and more technical details of
the concepts will be published later in a research pa-
per. Our approach is generic and can be used for other
ADAS/ADS applications and can even be applied in
similar ways at other entities in the CCAM data chain,
e.g. at data service providers. The continuation of this
work is preferably done with participation of stake-
holders such as road operators, data providers and ve-
hicle OEMs, seeking agreements on data quality and
trust specifications to ensure effective use of shared
data.
ACKNOWLEDGEMENTS
Most of this work is done as part of the DITM project
(DITM, 2022), a National Growth Fund project subsi-
dized by the Dutch government. DITM aims to make
future mobility safer and more efficient. The project
is expected to end in 2026.
REFERENCES
5GAA (2022). Misbehaviour Detection.
https://5gaa.org/content/uploads/2022/07/
5GAA-Misbehaviour-detection-Final.pdf. Page
visit on 18th of February 2025.
5GAA (2024). Creating Trust in Connected and Automated
Vehicles. https://5gaa.org/content/uploads/2024/05/
5gaa-trust4auto-white-paper-2024.pdf. Page visit on
18th of February 2025.
Bißmeyer, R., Mauthofer, S., Bayarou, K. M., and Kargl,
F. (2012). Assessment of node trustworthiness in
VANETs using data plausibility checks with particle
filters.
DITM (2022). Digital Infrastructure for
Future-proof Mobility. https://www.
tno.nl/en/digital/smart-traffic-transport/
automated-vehicle-technology-public/
ditm-digital-infrastructure-future-proof/. 2022 -
2026.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
636

EC (2018). C-ITS Point of Contact (CPOC): European
Union C-ITS Security Credential Management Sys-
tem (EU CCMS). https://cpoc.jrc.ec.europa.eu/index.
html. Page visit on 18th of February 2025.
EC (2023). Intelligent Speed Assistance (ISA) set to be-
come mandatory across Europe.
ETSI (2010). ETSI EN 302 665: Intelligent Transport Sys-
tem (ITS); Communication Architecture, V1.1.1.
ETSI (2021). ITS; Security; ITS communications secu-
rity architecture and security management; Release 2.
Technical report, ETSI ITS.
ETSI (2023). ITS; Security; Misbehavior Reporting ser-
vice; Release 2. Technical report, ETSI ITS.
Farah, H., Erkens, S., Alkim, T., and van Arem, B. (2018).
Infrastructure for Automated and Connected Driving:
State of the art and future research directions. Techni-
cal report, Road Vehicle Automation 4. Lecture Notes
in Mobility.
ISO/TC-204 (2020). Intelligent Transport Systems, Coop-
erative ITS, Dictionary of in-vehicle information (IVI)
data structures. Technical report, OSI TC-204.
J. Audun, R. H. and Pope, S. (2006). Trust network analy-
sis with subjective logic. in Conference Proceedings
of the Twenty-Ninth Australasian Computer Science
Conference.
Kamel, J., Ansari, M. R., Petit, J., Kaiser, A., Jemaa, I. B.,
and Urien, P. (2020). Simulation framework for mis-
behavior detection in vehicular networks.
Leinmuller, T., Schoch, E., Kargl, F., and Maihofer, C.
(2008). Decentralized position verification in geo-
graphic ad hoc routing.
Michiardi, P. and Molva, R. (2002). CORE: A Collaborative
Reputation Mechanism to Enforce Node Cooperation
in Mobile Ad Hoc Networks.
OECD (2023). Preparing infrastructure for automated vehi-
cles. Technical report, OECD / International Transport
Forum Research Reports.
Oliveira, P. (2024). Misbehaviour Detection System for In-
telligent Speed Assistance (ISA). In Proc. of 2024
IEEE Intelligent Vehicles Symposium (IV).
Philippe Smets, R. K. (1994). The Transferable Belief
Model. Artificial Intelligence.
van der Heijden, R. W., Dietzel, S., Leinmuller, T., and
Kargl, F. (2019). Survey on misbehavior detection in
cooperative intelligent transportation systems.
Zhang, J., Jemaa, I., and Nashashibi, F. (2022). Trust man-
agement framework for misbehavior detection in col-
lective perception services. In 17th International Con-
ference on Control, Automation, Robotics and Vision
(ICARCV).
Quality and Trust Indicators of Digital Road Infrastructure Data Are Essential to Improve Its Usability: An Intelligent Speed Assist (ISA)
Study
637
