
Efficient Hit-Spectrum-Guided Fast Gradient Sign Method: An
Adjustable Approach with Memory and Runtime Optimizations
Daniel Rashedi
a
and Sibylle Schupp
Institute for Software Systems, Hamburg University of Technology, Germany
Keywords:
Fault Localization, Neural Networks, Adversarial Input Generation.
Abstract:
Fast Gradient Sign Method (FGSM) is an effective method for generating adversarial inputs for neural net-
works, but it is memory-intensive. DeepFault reduces the memory costs of FGSM by transferring Spectrum-
Based Fault Localization to neural networks. SBFL is a technique traditionally using the execution trace of
a program to identify suspicious code locations that are likely to contain faults. DeepFault employs SBFL to
identify neurons in a neural network that are likely to be responsible for misclassifications to guide FGSM. We
propose an adjustable hit-spectrum-guided FGSM approach applying a sub-model strategy to avoid gradient
ascent evaluation over the entire model. Additionally, we alter DeepFault’s hit-spectrum computation to be
vector-based to allow parallelization of computation, and we modify the hit spectrum to depend on a specific
class to allow targeted adversarial input generation. We conduct an experimental evaluation on image clas-
sification models showing how our approach allows trading off effectiveness of adversarial input generation
with reduced runtimes while maintaining scalability regarding larger models, with maximum runtimes on the
order of tens of seconds. For larger sample sizes, our approach reduces runtimes to fractions of 1/300 and less
compared to DeepFault. When processing larger models, it requires only one-third of FGSM’s memory usage.
1 INTRODUCTION
Fault localization in neural networks gains impor-
tance as research continuously expands deployment
of these systems across diverse domains. Inspired
by traditional software fault localization methods, re-
search has adapted fault localization techniques for
use in neural networks. These methods detect model
design flaws and training issues that negatively impact
a model’s accuracy. A closely related field focuses
on adversarial input generation, which reveals model
vulnerabilities through systematically crafted inputs.
The Fast Gradient Sign Method (FGSM) (Good-
fellow et al., 2015) is an approach that generates ad-
versarial input for a model by conducting the gradient
ascent method on a model’s input with respect to its
loss function. That is, FGSM leverages the loss func-
tion as an objective function to maximize in order to
obtain gradients that are used to alter images such that
they are misclassified by the model. Although FGSM
is efficient in terms of computational runtime, it re-
quires substantial memory overhead.
The DeepFault approach (Eniser et al., 2019)
a
https://orcid.org/0009-0007-1607-9947
overcomes FGSM’s memory overhead by interpreting
adversarial input generation as a problem of fault lo-
calization in neural networks. Spectrum-Based Fault
Localization (SBFL) (Jones et al., 2002) is a fault
localization technique that traditionally uses execu-
tion traces of software code and outcomes of pass-
ing and failing test cases to identify suspicious code
locations that are likely to contain faults. The out-
come of the test cases contributes to the hit spectrum
of each code location, which is then used to compute
a suspiciousness value. While SBFL was originally
applied to software code, DeepFault transfers SBFL
to neural networks for fault identification by consid-
ering correct and incorrect classifications instead of
test cases. DeepFault applies the outcome of neuron
suspiciousness computation to obtain a list of neurons
considered especially suspicious that serve to guide
FGSM. The approach aims to maximize the output of
suspicious neurons, and thus their impact on the out-
come, to generate adversarial inputs. Although this
approach successfully reduces memory requirements
compared to standard FGSM, it does so at the cost of
increased computational runtime. Our work builds on
the DeepFault approach and aims to enhance memory
and runtime efficiency, while also expanding its capa-
Rashedi, D., Schupp and S.
Efficient Hit-Spectrum-Guided Fast Gradient Sign Method: An Adjustable Approach with Memory and Runtime Optimizations.
DOI: 10.5220/0013463100003964
In Proceedings of the 20th International Conference on Software Technologies (ICSOFT 2025), pages 51-62
ISBN: 978-989-758-757-3; ISSN: 2184-2833
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
51

bilities by enabling targeted adversarial input genera-
tion.
Efficiency of fault localization methods has been
addressed by several works (Besz
´
edes, 2019; Zheng
et al., 2016; Wong et al., 2012; Ghosh et al., 2023),
but few fault localization methods for neural networks
report applying modifications for runtime or memory
optimizations. These types of optimizations are par-
ticularly interesting given the scale of modern neural
networks. Considering both the memory overhead of
FGSM and the computational runtime of DeepFault,
our work aims to enhance the efficiency of adversarial
input generation by enhancing DeepFault as follows.
First, we contribute an adjustable sub-model strat-
egy for the adversarial input generation that avoids
exhaustive model analysis. Instead of analyzing all
neurons of a model for their hit-spectra, our approach
creates a sub-model that shares inner layers up to a
specified layer with the original model. Consequently,
the expensive gradient ascent method is no longer ap-
plied on the entire model but only on the sub-model.
Our experimental evaluation on a MobileNet-V3
and on the SqueezeNet model architecture shows that
our approach allows trading off between adversar-
ial input quality and computational runtime. On the
MobileNet-V3 model, we tested different sub-model
sizes. These led to classifications of non-target classes
in favor of a target class with ratios of 6.70% and
60.22%, respectively. The smaller and larger sub-
models considered only 464 and 925,856 parameters,
respectively. The observed runtimes were 12.32s and
28.50s for the two sub-models. On the SqueezeNet,
the improvement was less pronounced with a jump
from 6.25% to 22.90% in favor of the target class re-
quiring 22.31s and 30.25s with sub-models of 1792
and 558,144 parameters, respectively.
We conducted experiments on two different mod-
els based on the dense layer model architecture. For
generating 9000 adversarial inputs, our approach re-
quires 1.06s and 1.25s. In comparison, an updated
variant of DeepFault requires 322.24s and 494.94s,
while FGSM requires 1.68s and 1.77s, respectively.
However, for small numbers of adversarial inputs,
our implementation reveals fixed computational over-
head. For generating 100 samples, our approach re-
quires 1.00s and 1.16s on the same models. In com-
parison, the updated variant of DeepFault requires
3.53s and 5.59s, while FGSM requires 0.02s and
0.02s, respectively.
Second, we contribute a vector-based hit-
spectrum computation that replaces DeepFault’s se-
quential neuron hit-spectrum analysis. Our approach
considers only the output layer of the selected sub-
model for hit-spectrum computation compared to
DeepFault that considers all neurons of the original
model. Additionally, we consider the use of vectors
essential to significantly improve hit-spectrum com-
putation times as these vectors can be represented
by tensors as provided by modern machine learn-
ing libraries and can thus be computed in a paral-
lelized fashion. On two different models based on
the dense layer model architecture, our implementa-
tion requires 0.26s and 0.25s for hit-spectrum com-
putation on the sub-model, while DeepFault requires
3.72s and 27.09s for the entire original models.
Finally, we extend DeepFault with targeted ad-
versarial capabilities. Unlike the original approach
which only aims to reduce overall accuracy, our
method can guide misclassifications toward specific
target classes. We do so by making hit-spectrum com-
putation class-dependent and consider only correct
and incorrect classifications in favor of a target class.
In summary, our work enhances the DeepFault ap-
proach in three key directions:
1. an adjustable sub-model strategy for input gener-
ation,
2. vector-based hit-spectrum computation, and
3. targeted adversarial input generation capabilities.
To support both reproducibility and further research,
we provide our implementation and evaluation scripts
publicly available on GitHub.
1
The remainder of this paper is structured as fol-
lows. Section 2 provides an overview of related work.
Section 3 describes the necessary background infor-
mation. Section 4 presents our approach. Section 5
evaluates our approach. Section 6 gives a conclusion.
2 RELATED WORK
Numerous works have already contributed to the do-
main of fault localization in the context of software
code; however, few works have applied this concept
to neural networks. This section covers related works
in the domain of fault localization for neural networks
and compares their contributions to our work’s contri-
bution.
DeepFault’s approach (Eniser et al., 2019) serves
as a foundation for this work as it is the first to
transfer the concept of spectrum-based fault local-
ization to neural networks. Other works have also
contributed improvements to DeepFault. (Hashemi-
far et al., 2024) improves the DeepFault approach by
expanding suspiciousness computation from individ-
ual neurons to pathways of neurons. The approach
1
https://github.com/IDahera/
fast-hs-adversarial-input-gen.git
ICSOFT 2025 - 20th International Conference on Software Technologies
52

presented in (Duran et al., 2021), a variant of Deep-
Fault, increases the original approach’s granularity by
not only considering a model misclassifying any sam-
ple of a selected class, but also considering pairs of
source and target classes. Our work addresses the us-
age of spectrum-based fault localization in neural net-
works, and it aims to improve its memory and runtime
performance. To the best of our knowledge, the works
improving DeepFault’s approach focus on improving
the quality of fault localization rather than addressing
memory or runtime efficiency optimizations.
Besides SBFL, Mutation-Based Fault Localiza-
tion (MBFL) approaches have also been transferred to
neural networks in aiding model development. Deep-
MuFL (Ghanbari et al., 2024) introduces a novel
approach to fault localization in neural networks
through mutation-based methods. DeepMuFL sys-
tematically modifies the network to guide developers
in identifying and addressing design problems. Yin
et al. propose DFauLo (Yin et al., 2023), an ap-
proach that generates mutants by training copies of
a given model on strategically selected training sam-
ples. The behavior of these mutants on selected sam-
ples is compared to the behavior of the original model
to derive a likelihood for specific samples containing
faults. However, to the best of our knowledge, none
of the MBFL works report optimizing fault localiza-
tion methods for neural networks in terms of memory
or runtime efficiency.
Recent research in the domain of fault localiza-
tion for neural networks has also proposed a series of
methods (Wardat et al., 2022; Eniser et al., 2019; Cao
et al., 2022; Usman et al., 2021) applying static and
dynamic approaches on neural networks to identify is-
sues in their design or training process. Static checks
apply patterns of best practices in model initialization
and compilation to avoid executing models. Dynamic
approaches, on the other hand, gather traces of model
execution such as parameter valuations or classifica-
tion outcomes to identify and locate problems such as
model design issues or improvable selection of train-
ing parameters. Neither of these works addresses tra-
ditional fault localization methods or improvement of
their memory and runtime efficiency.
3 BACKGROUND
This section briefly covers the concept of SBFL and
its application to neural networks as proposed by the
work (Eniser et al., 2019). As described in prior
sections, SBFL is a method from software fault lo-
calization that traditionally uses execution traces of
software code in combination with positive and neg-
ative test outcomes to identify code regions statisti-
cally more likely to contain faults. Intuitively, the hit
spectrum of a code region is determined by two fac-
tors: first, whether a line of code was executed (hit)
or not executed (miss), and second, whether the corre-
sponding test case passed or failed. The combination
of these factors determines the statistical likelihood of
a fault in that code region. The hit spectrum is then
used to compute a suspiciousness value for each code
region. The following definitions show how the con-
cept of SBFL is transferred to neural networks as a
basis for the remainder of this work.
Definition 3.1 (Neural Network). We define a neural
network as a 3-tuple M = (N,E,L) where N is a set
of neurons, E is a set of edges, and L = {l
1
,... , l
k
}
is a set of k layers with ∀i, j ∈ {1,... , k} : l
i
⊂ N and
l
i
∩ l
j
=
/
0 if i ̸= j. We consider each neuron φ ∈ N to
represent an activation function φ : R
m
→ R mapping
m-dimensional real values to a single real value.
The definition of a neural network serves as a basis
to define the hit spectrum of a neuron in the following.
Without loss of generality, we can assume that layer
l
1
is the input layer and layer l
k
is the output layer of
the neural network M . This assumption is valid as
we can relabel the layers accordingly. Furthermore,
we can also construct layers consisting of only one
neuron to cover various model designs.
Definition 3.2 (Hit Spectrum of a Neuron (Eniser
et al., 2019)). Given a neural network M = (N, E,L)
with a set X = {x
1
,... , x
n
} of input samples for M ,
the hit spectrum of a neuron φ ∈ N is defined as the
4-tuple HS
X
(φ) = (a
s
,a
f
,n
s
,n
f
) as follows:
• a
s
∈ N is the number of samples x
i
∈ X that acti-
vate φ and are correctly classified by the model.
• a
f
∈ N is the number of samples x
i
∈ X that acti-
vate φ and are misclassified by the model.
• n
s
∈ N is the number of samples x
i
∈ X that do
not activate φ and are correctly classified by the
model.
• n
f
∈ N is the number of samples x
i
∈ X that do
not activate φ and are misclassified by the model.
A sample x ∈ R
m
activates a neuron φ if φ(x) > δ.
However, in practice, neurons from any layer other
than the input layer receive their input from other neu-
rons. In Section 5, we conducted our experiments
with a threshold of δ = 0 for the models used, as
this value already leads to reasonable suspiciousness
value distributions among the selected layers’ neu-
rons. We expect that higher values of δ may serve
useful if the selected activation function in combina-
tion with the model’s input samples lead to overall
high activation ratios in the model’s layers. Also note
Efficient Hit-Spectrum-Guided Fast Gradient Sign Method: An Adjustable Approach with Memory and Runtime Optimizations
53

that for simplification purposes, our above notation
does not explicitly represent weights or biases in the
activation function φ. Although the weights and bi-
ases are present in real-world neural networks, they
are not significant for the workflow of our approach
as described in following sections.
The neuron hit spectrum is then used to compute a
suspiciousness value for each neuron φ ∈ N using one
of multiple well-known suspiciousness functions. We
have selected two standard metrics that the reference
work (Eniser et al., 2019) also makes use of, namely
Tarantula (Jones et al., 2002) and Ochiai (Abreu et al.,
2006), to compute the suspiciousness value of a neu-
ron. Both metrics compute a ratio based on the hit
spectrum of the given neuron.
Tarantula(a
s
,a
f
,n
s
,n
f
) =
a
f
a
f
+n
f
a
f
a
f
+n
f
+
a
s
a
s
+n
s
(1)
In Tarantula, the numerator term captures the ratio of
failed test cases upon activation of the neuron to the
total number of failed test cases. Accordingly, the sec-
ond addend of the denominator term captures the ratio
of passed test cases upon activation of the neuron to
the total number of passed test cases. Tarantula com-
pares the former fraction to the sum of both fractions
to compute the suspiciousness value of a neuron.
Ochiai(a
s
,a
f
,n
s
,n
f
) =
a
f
p
(a
f
+ n
f
) · (a
f
+ a
s
)
(2)
In comparison, the Ochiai metric calculates suspi-
ciousness using the ratio of failed test cases where
the neuron is activated (a
f
in the numerator) to the
square root of two terms multiplied together in the
denominator: (a
f
+ n
f
) representing the total num-
ber of failed test cases regardless of neuron activation,
and (a
f
+ a
s
) representing the total number of times
the neuron was activated across both passed and failed
test cases.
4 APPROACH
Our work enhances the DeepFault approach (Eniser
et al., 2019) by addressing the approach’s memory
and runtime efficiency, while also expanding its capa-
bilities from general to targeted adversarial input gen-
eration. First, we describe our hit-spectrum computa-
tion in terms of vector arithmetic for usage of modern
tensor libraries. These libraries allow reducing time
complexity as they use parallelized tensor arithmetic
computation. Additionally, we provide a modifica-
tion that computes the hit spectrum with respect to a
target class to obtain suspiciousness values for neu-
rons that guide towards misclassification in favor of
the selected class. This modification contributes to
the generation of targeted adversarial inputs. Second,
we propose a gradient ascent method that leverages a
sub-model strategy for input synthesis.
4.1 Targeted Hit-Spectrum
Computation
One of our approach’s key components is an updated
hit-spectrum computation method that leverages vec-
tor arithmetic to improve runtimes. Algorithm 1 de-
picts our proposed approach. The algorithm iterates
over the samples X
t
= {x
1
,... , x
n
} of target class t
and computes the hit spectrum of layer l
i
as follows.
First, model M is evaluated on the provided sample
and the approach initializes variables y and α con-
taining the output of the model for this sample and
the corresponding activation values of layer l
i
, respec-
tively. Next, we obtain vectors a
s
, a
f
, n
s
, and n
f
using
logical conjunction and negation operations to con-
struct the layer’s hit spectrum. We assume that y and
y
x
i
are binary vectors for element-wise equality to ob-
tain h defined by =
e
. Given two m-dimensional vec-
tors a and b, we assume that for c = (a =
e
b) the fol-
lowing holds.
∀i ∈ {1, ..., n} : c
i
=
(
1 if a
i
= b
i
0 if a
i
̸= b
i
(3)
In practice, the binary vectors are manually obtained
by making only the element of y contain value 1 at the
index that model M predicts as the output class, α
j
contains 1 at an index if a threshold activation value
for the corresponding neuron is reached. In the same
manner, we assume vectors h and α to be binary vec-
tors. Finally, the binary vectors h and α must be con-
verted to integer vectors. This allows performing the
sum operation in the next step to adjust the currently
computed hit spectrum of the layer. The process is
repeated for all selected samples.
Note that we have chosen to use only samples X
t
of class t to compute the hit spectrum of layer l
i
in-
stead of using the entire set of available samples. Es-
sentially, we conduct hit-spectrum computation with
respect to samples of a target class t that the approach
generates adversarial samples for. By doing so, the hit
spectrum derived from this reduced sample set intu-
itively no longer captures the suspiciousness for gen-
eral misclassifications, but it captures suspiciousness
for misclassifications in favor of class t. Of course,
one may also consider samples of arbitrary classes if
regular adversarial input generation is the goal. Also
note that our approach only considers the output layer
of the sub-model for hit-spectrum computation. This
ICSOFT 2025 - 20th International Conference on Software Technologies
54

Input: model M , layer l
i
, sample set X
t
and
set Y
t
= {y
x
1
,... , y
x
n
} of expected
outputs
Result: hit spectrum hs
i
of layer l
i
over X
t
.
(a
s
,a
f
,n
s
,n
f
) ← (0, 0,0,0);
for x
j
∈ X
t
do
(y,α ← (M .out put(x
j
),l
i
.active(x
j
));
h ← (y =
e
y
x
j
) [hit vector];
a
s
← a
s
+ h ∧ α;
a
f
← a
f
+ ¬h ∧ α;
n
s
← n
s
+ h ∧ ¬α;
n
f
← n
f
+ ¬h ∧ ¬α;
end
return hs
i
= (a
s
,a
f
,n
s
,n
f
)
Algorithm 1: Targeted Hit-Spectrum Analysis Us-
ing Vector Arithmetic.
is a contrast to the original DeepFault approach that
computes hit spectrums for all neurons.
By leveraging vector arithmetic our approach for
hit-spectrum computation becomes runtime efficient
and scalable for modern hardware and modern li-
braries such as TensorFlow or PyTorch conducting
parallelized vector and matrix computation. The al-
ternative as conducted by related work (Eniser et al.,
2019) iterates over neurons in a layer using scalar
operations. Time complexity for our computation of
a
s
,a
f
,n
s
,n
f
can be estimated by
Time complexity: O(n/p) (4)
where n is the number of neurons in layer l
i
and p
is the number of processing units. A linear approach
would have a time complexity of O(n) as it requires
considering individual scalar operations.
In contrast to time complexity, our modifications
raise the space complexity. Instead of storing scalar
values, entire vectors of length n are stored leading to
the following space complexity
Space complexity: O(3n) = O(n) (5)
as both input vectors of each operation and the out-
come must be stored in memory during parallelized
computation.
4.2 Gradient Ascent Method
Leveraging Sub-Model Strategy
Next, we describe our approach for generating adver-
sarial inputs using a gradient ascent method applying
a sub-model strategy. Neural networks with larger
neuron numbers can pose significant computational
challenges with their regular forward pass. Applying
the chain rule for backpropagation in the context of
gradient ascent amplifies the computational demands
on time and space requirements. For that reason, we
propose a sub-model strategy that no longer conducts
backpropagation on the entire model but only on the
layers of the sub-model to obtain a fraction of the pre-
vious time and space requirements.
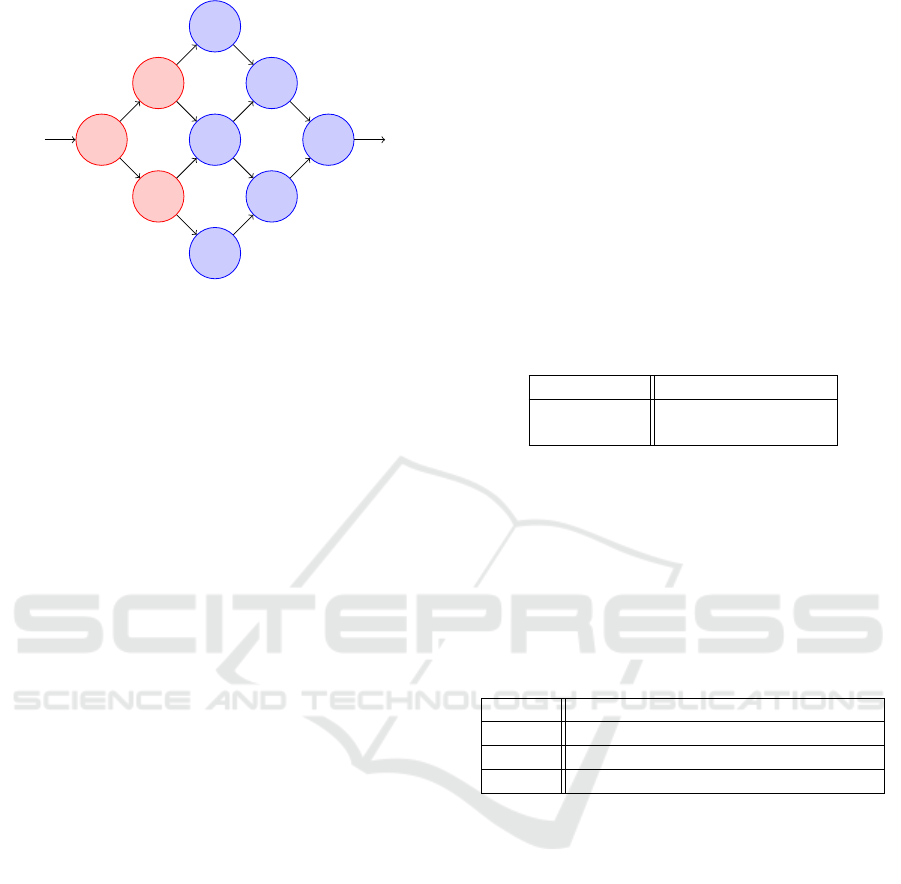
Figure 1 illustrates one example of how to ob-
tain a sub-model from a given model. In this model,
we have colored neurons in red to indicate the sub-
model’s neurons such that only 3 out of 9 neurons
are considered for the gradient ascent method. Please
note that the sub-model strategy is not limited to se-
quential models, but can be applied to any model ar-
chitecture. Section 5 covers our experimental evalua-
tion which also considers non-sequential models. We
have chosen to manually select layer configurations
to obtain sub-models for the selected non-sequential
models as an automated sub-model generation ex-
ceeds the scope of this work.
Input: model M
′
, hit spectrum hs
i
of layer
l
i
, suspiciousness function
σ ∈ {Tarantula, Ochiai}, sample
set X
t
to modify
Result: modified sample set X
′
s
i
← σ(hs
i
) ;
Ω ← top
sus indices(s
i
,k) ;
X
′
← X ;
for t ∈ iterations do
Y
′
← RunModel(M
′
,X
′
) ;
∇ ←
∂(
∑
i∈Ω
Y
′
k
[i])
∂X
′
;
X
′
← X
′
+ ∇ ∗ ε
end
Algorithm 2: Adversarial Input Generation Using
Sub-Model Strategy.
Algorithm 2 describes our approach. Considering
some model M = (N, E, L), the algorithm takes as
input
• a set of samples X
t
not of the target class t,
• the computed hit spectrum hs
i
for layer l
i
,
• σ ∈ {Tarantula, Ochiai} as the suspiciousness
function,
• sub-model M
′
= (N
′
,E
′
,L
′
) where N
′
⊂ N, E
′
⊂
E such that ∀e ∈ E
′
: e = (n
pre
,n
post
) it holds
n
pre
,n
post
∈ N
′
, and L
′
⊂ L such that ∀l
i
∈ L
′
it
holds l
i
⊂ N
′
.
Note that the main algorithm does not need to con-
sider any target class because targeted hit-spectrum
computation is conducted in the prior step.
During initialization, the algorithm computes the
layer’s suspiciousness values using the provided sus-
Efficient Hit-Spectrum-Guided Fast Gradient Sign Method: An Adjustable Approach with Memory and Runtime Optimizations
55
n
1,1
n
2,1
n
2,2
n
3,1
n
3,2
n
3,3
n
4,1
n
4,2
n
5,1
Figure 1: Example of a sub-model.
piciousness metric σ. Then, it determines the k neu-
rons with the largest suspiciousness values. Note that
the k most suspicious neurons we consider are all in-
cluded in the sub-model’s output layer. Section 5 cov-
ers our experimental evaluation of the algorithm and
gives insight on appropriate values for these parame-
ters. Additionally, the algorithm creates a copy X
′
of
the samples to be modified.
Based on the approach DeepFault (Eniser et al.,
2019), the algorithm’s loop first conducts a forward
pass on the samples to be modified by executing the
model via RunModel to obtain the sub-model’s out-
put. Then, it computes the gradient ∇ by taking the
partial derivative of the sub-model’s most suspicious
neurons’ output with respect to the current version
of the samples. Recall that the layer l
i
is the output
layer of the sub-model and contains the most suspi-
cious neurons. Finally, the main step of the algorithm
updates the samples X
′
by adding the gradient multi-
plied by some value ε. These steps are repeated for a
predefined number of iterations.
5 EVALUATION
This section is dedicated to the experimental evalua-
tion of our proposed approach. After providing details
on the system setup, we describe the research ques-
tions and associated experiments. As part of the first
research question, we investigate our approach’s sub-
model strategy. Specifically, we examine how it al-
lows trading off runtimes and memory usage for qual-
ity of adversarial input generation. We do so by com-
paring different sub-model configurations for two se-
lected public models trained on the public cifar10
dataset. As part of the second research question, we
compare efficiency of our approach against the re-
lated work, DeepFault, and the original FGSM at-
tack. Finally, we evaluate how various parameters im-
pact both quality of adversarial input generation and
runtime efficiency, identifying configurations that im-
prove results while maintaining short execution times.
Before proceeding with the research questions and
their evaluation, we provide details on the software
and hardware specifications to ensure experimental
reproducibility. For our experiments, we have cho-
sen to implement our approach in Python using the
PyTorch (torch) library and the torchvision li-
brary for creating instances of publicly available im-
age classification models. For both libraries, we have
used the recent stable versions available at the time
of conducting the experiments. Table 1 provides de-
tails on the software specification used for our exper-
iments.
Table 1: Software Specifications.
OS ubuntu@22.04
Python 3.12 torch@2.4.0
torchvision@0.19.0
We conducted experimental evaluation on a sys-
tem with a hardware specification given in Table 2.
Note that although the system has two GPUs, our
implementation was not adapted to split computation
across multiple GPUs. Early attempts to enable Py-
Torch’s built-in multi-GPU support indicated the need
for sophisticated modifications beyond the scope of
this work.
Table 2: Hardware Specifications.
CPU AMD Ryzen 2990WX 32-Core CPU
GPU 1 RTX 2080 Ti (11.264 MiB)
GPU 2 RTX 2080 Ti (11.264 MiB)
RAM 125 GiB
For our experiments, we have chosen to evaluate
our approach on 4 models and 3 datasets. We chose
two simpler models, a small dense layer model and
a small convolutional layer model based on LeNet
(LeCun et al., 1998), which we trained and evalu-
ated on the mnist and fashion mnist (abbreviated
as f-mnist in tables) datasets to cover simpler sce-
narios. Additionally, we also used the MobileNet V3
Small (MNV3) (Howard et al., 2019) and SqueezeNet
(SN) (Iandola et al., 2016) models trained on the
cifar10 dataset to evaluate our approach on larger
and more complex models and datasets to cover sce-
narios closer to an actual application. During initial-
ization, every model was trained for 5 epochs on the
corresponding training set using the Adam optimizer
(Kingma and Ba, 2014). Table 3 gives an overview
of the models, the associated datasets, the number of
parameters, and the accuracy of the models on the cor-
responding test set.
ICSOFT 2025 - 20th International Conference on Software Technologies
56
Table 3: The models and the associated datasets used for
evaluation.
Model Dataset Parameters Acc.
LeNet mnist 28,534 98.63 %
DenseNet mnist 576,810 97.28 %
LeNet f-mnist 28,534 88.65 %
DenseNet f-mnist 576,810 87.42 %
MNV3 cifar10 2,542,856 87.74 %
SN cifar10 1,235,496 79.00 %
5.1 RQ1: Trading off Runtimes and
Memory Usage for Adversarial
Input Generation Quality
As part of the first research question, we investi-
gate how our sub-model strategy enables trading off
between runtime performance, memory usage, and
adversarial input generation quality. We conducted
these experiments exclusively on the MNV3 and SN
models trained on the cifar10 dataset as we expect
minor differences in different configurations of sub-
models for the smaller scale models with much fewer
neurons and layers. For each model, we constructed
two different configurations of sub-models, one with
a sub-model containing less than 1 percent of the orig-
inal model’s neurons and one with layers containing
roughly 30 to 45 percent of the original model’s neu-
rons. Table 4 provides an overview of the sub-model
configurations used for evaluation. We have selected
the following parameters for the experiments:
• |X| = 9000: number of non-class-0 samples to be
modified,
• k = 5: number of most suspicious neurons se-
lected,
• iterations = 5: iterations for the modification pro-
cess,
• σ = Ochiai, and
• ε = 1.0: gradient factor.
Table 4: The sub-model configurations.
Model Parameters Size Ratio
MNV3 (A) 464 0.02 %
MNV3 (B) 925,856 36.41 %
SN (C) 1,792 0.15 %
SN (D) 558,144 41.18 %
Table 5 provides an overview of the results of the
experiments conducted for RQ1. The table shows the
resulting percentage of predictions in favor of the tar-
get class and the corresponding durations for the ad-
versarial input generation process. The results show
that the percentage of predictions in favor of target
class t = 0 significantly increases with the number of
parameters of the sub-model. This is expected as the
sub-models with more parameters are able to capture
more of the original model’s behavior. However, the
results also show that the duration of the adversar-
ial input generation process increases with the num-
ber of parameters of the sub-model. These results
demonstrate how our approach allows for a trade-off
between the percentage of predictions in favor of the
target class and the duration of the adversarial input
generation process. Our key findings include:
• Our approach was capable of modifying the sam-
ples such that the original model misclassified
6.7% in favor of target class t = 0 although sub-
model A itself contains 0.02% of the original
model’s parameters.
• By increasing runtimes, sub-model B with
36.41% of the original model’s parameters had a
60.22% misclassification rate in favor of the target
class.
• We make similar observations on both variants
of the SN model. However, the misclassification
rates in favor of class t = 0 are lower compared to
the MNV3 model. This could be due to the SN
model’s lower accuracy on the cifar10 dataset
possibly related to its smaller size. Its specific ar-
chitecture could also make the selected neurons
less effective for adversarial input generation.
The relationship between sub-model size and process-
ing duration is not strictly linear. We hypothesize that
this non-linearity may be attributed to data transfer
overhead between different memory locations, partic-
ularly when moving datasets and models to and from
GPU memory.
Table 5: Target class prediction rates and runtimes for dif-
ferent sub-model configurations.
Model t-Pred. Time (s)
MNV3 (A) 6.70 % 12.32
MNV3 (B) 60.22 % 28.50
SN (C) 6.25 % 22.31
SN (D) 22.90 % 30.25
5.2 RQ2: Comparison of Runtimes and
Memory Usage Against FGSM and
DeepFault
Next, we compare our approach’s runtimes and mem-
ory usage against DeepFault and regular FGSM.
More specifically, we compare:
Efficient Hit-Spectrum-Guided Fast Gradient Sign Method: An Adjustable Approach with Memory and Runtime Optimizations
57
• hit-spectrum computation runtimes between
DeepFault on complete models and our approach
on sub-models, and
• input synthesis runtimes between all three ap-
proaches.
For the experimental evaluation we used the following
setup consisting of:
• DF@tf1: the publicly available source code of
DeepFault
2
which uses TensorFlow Version 1
(tensorflow@1.13.2),
• DF@tf2: a custom version of DeepFault that
we have migrated to TensorFlow Version 2
(tensorflow@2.12.00) for a more meaningful
comparison as we are aware of the numerous im-
provements of TensorFlow Version 2 over Version
1, and
• FGSM: a custom version of FGSM we imple-
mented using PyTorch (torch@2.4.0) for our ex-
isting experimental setup initially introduced due
to the original approach being a well-known at-
tack of simpler nature so that we obtain a better
comparison,
Due to the substantial differences between the imple-
mentation of PyTorch and TensorFlow, we avoided a
migration of DeepFault to PyTorch because we con-
sider the required changes. Nonetheless, our experi-
ments use the original DeepFault implementation for
comparison to cover the original authors’ work and
intentions. Note that we also applied minor modifica-
tions to both DeepFault variants to conduct our exper-
iments’ runtime measurements.
First, we examine the hit-spectrum computation
times of DeepFault and our approach. We use two
dense layer models using the reLU function as ac-
tivation function listed in Table 6. Both models
Table 6: Dense layer models used for experimental evalua-
tion.
Model Description
8x20-DenseNet
8 dense layers
each with 20 neurons
10x100-DenseNet
10 dense layers
each with 100 neurons
were trained on the mnist dataset for 5 epochs us-
ing the Adam optimizer. We selected this dense layer
model architecture because it was also used by (Eniser
et al., 2019) for experimental evaluation, and it is na-
tively supported by their implementation without fur-
ther modifications. Moreover, we chose two different
2
https://github.com/hfeniser/DeepFault
models to better capture the applications’ behavior on
different model sizes.
Table 7 provides an overview of the determined
hit-spectrum computation times of both DeepFault
versions and our approach. The results show that
our approach is significantly faster than both DF@tf1
and DF@tf2 for both models. Our approach takes
0.26s and 0.25s for the 8x20-DenseNet and 10x100-
DenseNet models, respectively. In contrast, DF@tf1
takes 3.72s and 27.09s, and DF@tf2 takes 4.82s and
22.02s for the same models. That is, our approach
computes the hit spectrum for 8x20-DenseNet and
10x100-DenseNet roughly 14 times and 104 times
faster than DF@tf1, respectively, With respect to
DF@tf2, our approach computes the hit spectrum
for 8x20-DenseNet and 10x100-DenseNet roughly 19
times and 88 times faster, respectively. To wrap it
up, implementing the hit-spectrum computation using
tensors leads to a significant runtime improvement.
Table 7: Computation times for hit-spectrum generation us-
ing 20 batches each of 64 samples.
Approach DenseNet
8x20 10x100
DF@tf1 3.72 s 27.09 s
DF@tf2 4.82 s 22.02 s
Our Work 0.26 s 0.25 s
Next, we compare the input synthesis times of
DF@tf1, DF@tf2, FGSM, and our approach by con-
ducting the experiments again on the 8x20-DenseNet
and 10x100-DenseNet models. Table 8 and Table 9
provide an overview of the determined input synthe-
sis times of the different approaches instructed to gen-
erate 10,100, 1000, 9000 adversarial samples respec-
tively. We make multiple noteworthy observations.
Our approach reveals small variations with grow-
ing sample sizes. For 100 samples it takes 1.02s for
the 8x20-DenseNet model and 1.16s for the 10x100-
DenseNet model. However, with 9000 samples, the
runtimes are 1.06s and 1.25s for the 8x20-DenseNet
and 10x100-DenseNet models, respectively. The run-
times increase only by 0.06s and 0.09s, respectively.
Our implementation likely has fixed overhead costs
in data processing and memory management. While
these cause higher initial runtimes, their impact be-
comes negligible with larger datasets.
DF@tf1 is not capable of generating adversarial
samples for any of the models with 1000 and 9000
samples within a reasonable time frame. DF@tf1
takes significantly longer than the other approaches
with 2020.84s for 100 samples. Additionally, its run-
times appear to increase exponentially. 100 sam-
ples take 2020.84s which far surpasses its runtimes
ICSOFT 2025 - 20th International Conference on Software Technologies
58
of 7.81s for 10 samples that we measured separately.
That is, repeating the input generation for 10 samples
multiple times appears to be more efficient. We sus-
pect that the larger delays are caused by the imple-
mentation’s usage of the outdated TensorFlow Ver-
sion 1 which may perform non-optimal memory man-
agement leading to memory overhead.
DF@tf2 demonstrates more efficient runtimes
than DF@tf1, with computation times roughly pro-
portional to sample sizes. It ranges from 3.53s on 100
samples to 322.24s on 9000 samples for the 8x20-
DenseNet model, and it ranges from 0.59s on 100
samples to 494.94s on 9000 samples for the 10x100-
DenseNet model. Hence, DF@tf2 requires notably
more time for 100 samples, and significantly more
time for 9000 samples.
FGSM has the fastest runtimes for both models
with 10-1000 samples. However, with 9000 samples,
our approach outperforms FGSM - running 0.62s
faster for the 8x20-DenseNet model (1.06s total) and
0.52s faster for the 10x100-DenseNet model (1.25s
total). When generating larger sample sets for the
larger models MNV3 and SN using FGSM, we en-
countered memory overflows, prompting further in-
vestigation of memory requirements. This observa-
tion leads to the next experiment.
Table 8: Runtime comparison of selected input synthe-
sis methods on 8x20-DenseNet model with varying sample
sizes.
Approach Number of Samples
100 1000 9000
DF@tf1 2020.84 s N/A N/A
DF@tf2 3.53 s 36.07 s 322.24 s
FGSM 0.02 s 0.19 s 1.68 s
Our Work 1.02 s 1.27 s 1.06 s
Table 9: Runtime comparison of selected input synthesis
methods on 10x100-DenseNet model with varying sample
sizes.
Approach Number of Samples
100 1000 9000
DF@tf1 2993.29 s N/A N/A
DF@tf2 5.59 s 53.33 s 494.94 s
FGSM 0.02 s 0.20 s 1.77 s
Our Work 1.16 s 1.29 s 1.25 s
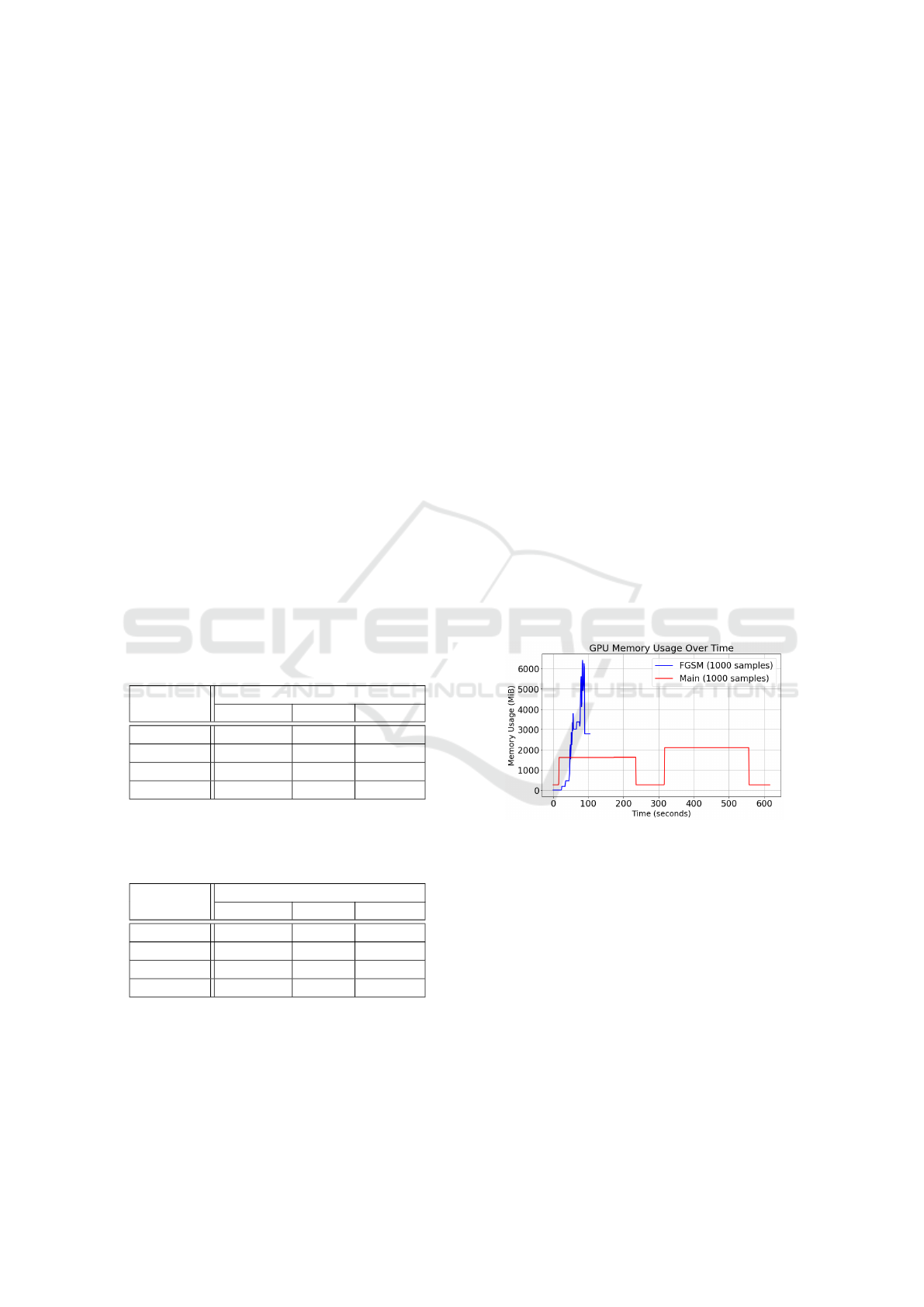
We also conducted experiments to evaluate the
memory usage of our approach and FGSM for gen-
erating adversarial samples. To examine the mem-
ory usages of FGSM and our approach, we have used
the larger model MNV3 and SN as inputs and in-
structed both approaches to generate 1000 adversar-
ial samples. More specifically, we have measured the
GPU memory usage of both approaches first generat-
ing 1000 samples for the MNV3 model and then for
the SN model. Figure 2 provides a graph of the re-
sulting memory usage of both approaches. We make
the following observation: FGSM requires less time
for the synthesis of adversarial samples, but it also re-
quires more memory. More specifically, it required
roughly 100s as opposed roughly 550s on our ap-
proach for the sequence of both models. However,
for only 1000 samples, FGSM peaks at 6414 MiB, our
approach peaks at 2106 MiB, hence requiring roughly
one-third of memory usage. We consider this to be the
reason for the aforementioned memory overflows we
have encountered while attempting to generate 9000
samples immediately using FGSM.
To wrap the evaluation for research question 2 up,
we conclude from the experimental results:
• that our approach is able to outperform both
DeepFault and FGSM in terms of runtimes con-
sidering especially large numbers of samples to
synthesize, and
• our approach slightly falls behind FGSM in terms
of runtimes for smaller sample sizes, but it is able
to generate adversarial samples for larger models
and datasets with significantly less memory usage.
Figure 2: GPU memory usage over time comparing our ap-
proach with FGSM in generating 1000 adversarial samples
for the MNV3 and SN models.
5.3 RQ3: Effectiveness of Adjustable
SBFL-guided Target Adversarial
Input Generation
As part of the last research question, we evaluate
the effectiveness of our approach on adversarial input
generation. First, we want to examine whether the
modifications on hit-spectrum computation and input
synthesis indeed succeed in adversarial input that mis-
classified in favor of the selected class. Secondly, our
experiments investigate the impact of different param-
eter values on the effectiveness and runtimes of the
Efficient Hit-Spectrum-Guided Fast Gradient Sign Method: An Adjustable Approach with Memory and Runtime Optimizations
59
adversarial input generation process. We identify the
following list of parameters that we consider relevant
with respect to effectiveness and runtimes of our im-
plementation beyond sub-model configurations:
• k: the number of most suspicious neurons to be
used for adversarial input generation,
• iterations: the number of iterations for the modi-
fication process, and
• ε: the gradient factor.
We expect that k is a parameter that affects the effec-
tiveness of the adversarial input generation process,
while iterations and ε are parameters that affect the
runtimes of the adversarial input generation process.
For the third research question, we again con-
sider the previously described models, namely LeNet,
Dense, MNV3, and SN. For all models we have cho-
sen to select a sub-model representing roughly half
the size of the original model. To evaluate the ap-
proach’s effectiveness at generating targeted adversar-
ial inputs, only samples from non-target classes (ex-
cluding class t = 0) were selected for modification.
Number of Neurons K. The first experiment varies
the number of neurons to become targets for adver-
sarial input generation such that we consider k ∈
{10,50}. Table 10 lists the obtained prediction rates
in favor of the target class and the associated runtimes.
In 4 out of 6 cases, we consider the improvements
in prediction rates to be insignificant. The DenseNet
model trained on mnist even shows a slight decrease
in prediction rates. At the same time the runtimes ap-
pear to increase roughly by factors of 2-3.5. For in-
stance, the SN model improves from 6.32% to 7.69%
with k = 50, but the runtime also increases from
32.75s to 114.96s. Only the LeNet models trained on
mnist and f-mnist show significant improvements
in prediction rates with k = 50. They increase from
0.64% to 24.13% and from 46.13% to 63.34%, re-
spectively. We conclude that the number of neurons
selected for adversarial input generation certainly af-
fects runtimes significantly, however, improvements
appear to depend on the model architecture.
Number of Iterations. The number of iterations to
apply the gradient ascent algorithm is the next param-
eter we investigate. We consider it particularly inter-
esting because choosing different numbers of itera-
tions may grant insight into benefits obtained from re-
peating the gradient ascent loop rather than repeating
the whole process. Usage of the loop allows keeping
the models and datasets in memory instead of reload-
ing them. This could serve useful in scenarios where
the optimal number of iterations or gradient factor is
Table 10: Our implementation’s prediction results on class
t = 0 and corresponding runtimes on various models using
varying number of neurons k.
Model k t-Pred. Time (s)
DenseNet
(mnist)
10 63.10% 2.71
50 62.04% 9.33
DenseNet
(f-mnist)
10 63.64% 3.05
50 63.69% 7.15
LeNet
(mnist)
10 0.64% 3.89
50 24.13% 7.15
LeNet
(f-mnist)
10 46.13% 3.78
50 63.34% 9.57
MNV3
(cifar10)
10 6.71% 15.42
50 7.01% 37.01
SN
(cifar10)
10 6.32% 32.75
50 7.69% 114.96
unknown such that the process can be repeated until
convergence of prediction rates.
Table 11 lists the obtained prediction rates in
favor of the target class and the associated run-
times with iterations ∈ {1, 10}. The table indicates
that the larger scale models, namely MNV3 and
SN show only slight variations in prediction rates.
DenseNet and LeNet models showed the most sig-
nificant changes. For instance, the DenseNet model
trained on mnist improves from 24.54% to 63.12%
with iterations = 10. On the other hand, the LeNet
model trained on mnist decreases from 6.38% to
1.58% with iterations = 10.
To get further insights, we consult the generated
adversarial samples for the DenseNet model trained
on mnist and the SN model trained on cifar10 for
iterations ∈ {1,10}. Figure 3 shows the adversar-
ial samples generated for the DenseNet model with
varying numbers of iterations, and Figure 4 shows the
adversarial samples generated for the SN model with
varying numbers of iterations. The images reveal the
significant difference between the changes obtained
with iterations = 1 and iterations = 10 for the indi-
vidual models and their datasets. More specifically,
the samples for the DenseNet appear to be more dis-
torted already at iterations = 1 compared to the SN
model. Moreover, the samples of the DenseNet model
appear to modified to an extent that they are hardly
recognizable as the original number, but they now
have more of a resemblance with value 0.
We conclude that an appropriate number of iter-
ations is crucial for trading between prediction rates
and runtimes. From the above observations, we sug-
gest that the model size and the dataset complex-
ity may be crucial factors in determining the optimal
number of iterations. The observations indicate that
large models with complex datasets may require more
ICSOFT 2025 - 20th International Conference on Software Technologies
60

iterations to achieve significant improvements in pre-
diction rates.
Table 11: Our implementation’s prediction results on class
t = 0 and corresponding runtimes on various models using
varying number of iterations.
Model iterations t-Pred. Time (s)
DenseNet
(mnist)
1 24.54% 3.30
10 63.12% 5.57
DenseNet
(f-mnist)
1 33.52% 1.27
10 63.69% 4.12
LeNet
(mnist)
1 6.38% 1.42
10 1.58% 5.09
LeNet
(f-mnist)
1 8.49% 1.48
10 29.84% 5.17
MNV3
(cifar10)
1 6.75% 9.31
10 6.70% 17.16
SN
(cifar10)
1 6.04% 14.19
10 6.76% 34.47
(a) iterations = 1.
(b) iterations = 10.
Figure 3: Adversarial samples generated for DenseNet
(mnist) model with varying number of iterations.
(a) iterations = 1.
(b) iterations = 10.
Figure 4: Adversarial samples generated for SN model with
varying number of iterations.
Gradient Factor ε. Finally, we examine the impact
of the gradient factor ε on the effectiveness of adver-
sarial input generation. The gradient factor ε is a pa-
rameter that we expect has a large impact on the pre-
diction rates, but we also expect runtimes to stay sta-
ble upon its variation.
Table 12 lists the obtained prediction rates in favor
of the target class and the associated runtimes with
ε ∈ {1.0, 5.0}. With an exception on the DenseNet,
the runtimes appear to stay stable upon the variation
of ε as expected. We suspect that some background
processing or data loading times may have caused this
exception on runtime of the DenseNet model.
Table 12: Our implementation’s prediction results on class
t = 0 and corresponding runtimes on various models using
varying values for ε.
Model ε t-Pred. Time (s)
DenseNet
(mnist)
1.0 60.25% 4.95
5.0 63.57% 2.71
DenseNet
(f-mnist)
1.0 63.42% 2.74
5.0 63.69% 2.31
LeNet
(mnist)
1.0 8.39% 2.76
5.0 0.00% 2.96
LeNet
(f-mnist)
1.0 31.50% 3.15
5.0 24.84% 2.92
MNV3
(cifar10)
1.0 6.70% 12.32
5.0 6.93% 13.08
SN
(cifar10)
1.0 6.25% 22.31
5.0 10.27% 23.01
6 CONCLUSION
Our research presents a novel approach to targeted
adversarial input generation that leverages SBFL
through a novel sub-model strategy. The experi-
mental results demonstrate several significant advan-
tages over existing methods. Our approach synthe-
sizes inputs notably faster compared to DeepFault,
and outperforms FGSM when dealing with large sam-
ple numbers. Additionally, our approach computes
hit spectrums on a sub-model’s output layer rather
than considering entire models, which substantially
reduces computational overhead compared to Deep-
Fault. Furthermore, our approach introduces flexibil-
ity in parameter selection for users to trade off adver-
sarial input quality against memory and runtime effi-
ciency.
Our experimental evaluation has granted insights
into the relationship between various parameters and
classification and performance results. The choice of
sub-model is a crucial factor in determining adversar-
ial input quality, while small gradient factors and it-
eration values led to reduced runtimes. Additionally,
we observed that the number of neurons to be consid-
ered by the gradient descent method not only allows
significantly influencing the quality of adversarial in-
puts, but it affects computational performance, too.
Efficient Hit-Spectrum-Guided Fast Gradient Sign Method: An Adjustable Approach with Memory and Runtime Optimizations
61

While our current experimental evaluation
demonstrates the effectiveness of our approach in
reducing runtimes and memory usage, they also
reveal the need for more systematic approach into
optimal parameter selection across different model
architectures. In particular, we aim to explore the
potential correlation between model complexity and
optimal parameter configurations.
ACKNOWLEDGEMENTS
This research benefited from the editorial assistance
of Claude 3.5 Sonnet (Anthropic, 2024), which
helped refine language and improve readability. All
intellectual contributions, including methodology, ex-
periments, analyses, and conclusions represent our in-
dependent work and original research contributions.
REFERENCES
Abreu, R., Zoeteweij, P., and Gemund, A. J. C. v. (2006).
An evaluation of similarity coefficients for software
fault localization. In Proceedings of the 12th Pacific
Rim International Symposium on Dependable Com-
puting, pages 39–46. IEEE.
Besz
´
edes, A. (2019). Investigating fault localization tech-
niques from other disciplines for software engineer-
ing. In Proceedings of the 14th International Con-
ference on Software Technologies, pages 270–277.
SciTePress.
Cao, J., Li, M., Chen, X., Wen, M., Tian, Y., Wu, B., and
Cheung, S.-C. (2022). DeepFD: Automated fault di-
agnosis and localization for deep learning programs.
In Proceedings of the 44th International Conference
on Software Engineering, pages 573–585. ACM.
Duran, M., Zhang, X.-Y., Arcaini, P., and Ishikawa, F.
(2021). What to blame? On the granularity of fault
localization for deep neural networks. In 2021 IEEE
32nd International Symposium on Software Reliability
Engineering (ISSRE), pages 264–275. IEEE.
Eniser, H. F., Gerasimou, S., and Sen, A. (2019). Deepfault:
Fault localization for deep neural networks. In Fun-
damental Approaches to Software Engineering, pages
171–191. Springer.
Ghanbari, A., Thomas, D.-G., Arshad, M. A., and Rajan, H.
(2024). Mutation-based fault localization of deep neu-
ral networks. In Proceedings of the 38th IEEE/ACM
International Conference on Automated Software En-
gineering, pages 1301–1313. IEEE.
Ghosh, D., Singh, J. P., and Singh, J. (2023). Concurrent
fault localization using ANN. International Journal
of System Assurance Engineering and Management,
14:2345–2353.
Goodfellow, I., Shlens, J., and Szegedy, C. (2015). Ex-
plaining and harnessing adversarial examples. arXiv
preprint arXiv:1412.6572.
Hashemifar, S., Parsa, S., and Kalaee, A. (2024). Path anal-
ysis for effective fault localization in deep neural net-
works. arXiv preprint arXiv:2401.12356.
Howard, A., Sandler, M., Chu, G., Chen, L.-C., Chen, B.,
Tan, M., Wang, W., Zhu, Y., Pang, R., Vasudevan, V.,
Le, Q. V., and Adam, H. (2019). Searching for Mo-
bileNetV3. arXiv preprint arXiv:1905.02244.
Iandola, F. N., Moskewicz, M. W., Ashraf, K., Han, S.,
Dally, W. J., and Keutzer, K. (2016). SqueezeNet:
AlexNet-level accuracy with 50x fewer parame-
ters and <0.5MB model size. arXiv preprint
arXiv:1602.07360.
Jones, J. A., Harrold, M. J., and Stasko, J. (2002). Visual-
ization of test information to assist fault localization.
In Proceedings of the 24th International Conference
on Software Engineering, pages 467–477. ACM.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
LeCun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86:2278–2324.
Usman, M., Gopinath, D., Sun, Y., Noller, Y., and
P
˘
as
˘
areanu, C. S. (2021). NNrepair: Constraint-based
repair of neural network classifiers. In Computer
Aided Verification, pages 3–25. Springer.
Wardat, M., Cruz, B. D., Le, W., and Rajan, H. (2022).
DeepDiagnosis: Automatically diagnosing faults and
recommending actionable fixes in deep learning pro-
grams. In Proceedings of the 44th International
Conference on Software Engineering, pages 561–572.
ACM.
Wong, W. E., Debroy, V., Golden, R., Xu, X., and Thurais-
ingham, B. (2012). Effective software fault localiza-
tion using an RBF neural network. IEEE Transactions
on Reliability, 61:149–169.
Yin, Y., Feng, Y., Weng, S., Liu, Z., Yao, Y., Zhang, Y.,
Zhao, Z., and Chen, Z. (2023). Dynamic data fault
localization for deep neural networks. In Proceedings
of the 31st ACM Joint European Software Engineer-
ing Conference and Symposium on the Foundations of
Software Engineering, pages 1345–1357. ACM.
Zheng, W., Hu, D., and Wang, J. (2016). Fault localization
analysis based on deep neural network. Mathematical
Problems in Engineering, 2016:1–11.
ICSOFT 2025 - 20th International Conference on Software Technologies
62
