
Proximal Policy Optimization with Graph Neural Networks for Optimal
Power Flow
´
Angela L
´
opez-Cardona
1 a
, Guillermo Bern
´
ardez
3 b
, Pere Barlet-Rose
1,2 c
and Albert Cabellos-Aparicio
1,2 d
1
Universitat Polit
`
ecnica de Catalunya, Barcelona, Spain
2
Barcelona Neural Networking Center, Barcelona, Spain
3
UC Santa Barbara, California, U.S.A.
Keywords:
Optimal Power Flow (OPF), Graph Neural Networks (GNN), Deep Reinforcement Learning (DRL), Proximal
Policy Optimization (PPO).
Abstract:
Optimal Power Flow (OPF) is a key research area within the power systems field that seeks the optimal oper-
ation point of electric power plants, and which needs to be solved every few minutes in real-world scenarios.
However, due to the non-convex nature of power generation systems, there is not yet a fast, robust solution for
the full Alternating Current Optimal Power Flow (ACOPF). In the last decades, power grids have evolved into
a typical dynamic, non-linear and large-scale control system —known as the power system—, so searching for
better and faster ACOPF solutions is becoming crucial. The appearance of Graph Neural Networks (GNN) has
allowed the use of Machine Learning (ML) algorithms on graph data, such as power networks. On the other
hand, Deep Reinforcement Learning (DRL) is known for its proven ability to solve complex decision-making
problems. Although solutions that use these two methods separately are beginning to appear in the literature,
none has yet combined the advantages of both. We propose a novel architecture based on the Proximal Policy
Optimization (PPO) algorithm with Graph Neural Networks to solve the Optimal Power Flow. The objective
is to design an architecture that learns how to solve the optimization problem and, at the same time, is able
to generalize to unseen scenarios. We compare our solution with the Direct Current Optimal Power Flow
approximation (DCOPF) in terms of cost. We first trained our DRL agent on the IEEE 30 bus system and with
it, we computed the OPF on that base network with topology changes.
1 INTRODUCTION
After several decades of development, power grids
have transformed into a dynamic, non-linear, and
large-scale control system, commonly referred to as
the power system (Zhou et al., 2020a). Today, this
power system is undergoing changes for various rea-
sons. Firstly, the high penetration of Renewable En-
ergy Sources (RES), such as photovoltaic plants and
wind farms, introduces fluctuations and intermittence
to power systems. This generation is inherently un-
stable, influenced by several external factors like so-
lar irradiation and wind velocity for solar and wind
power, respectively (Li et al., 2021). Concurrently,
a
https://orcid.org/0009-0008-9785-6740
b
https://orcid.org/0000-0002-6790-4878
c
https://orcid.org/0000-0001-7837-0886
d
https://orcid.org/0000-0001-9329-7584
the integration of flexible sources (e.g., electric vehi-
cles) brings about modifications to networks, includ-
ing relay protection, bidirectional power flow, and
voltage regulation (Zhou et al., 2020a). Lastly, emerg-
ing concepts like Demand Response—defined as the
alterations in electricity usage by end-use customers
from their typical consumption patterns in response
to variations in electricity prices over time—affect
the operational point within the electrical grid (Wood
et al., 2013). All these transformations render the op-
timization of production in power networks increas-
ingly complex. In this context, Optimal Power Flow
comprises a set of techniques aimed at identifying the
optimal operating point by optimizing the power out-
put of generators in power grids (Wood et al., 2013).
The traditional approach to solving the OPF in-
volves numerical methods (Li et al., 2021), with
Interior Point Optimizer (IPOPT) (Thurner et al.,
2018) being the most commonly employed. However,
López-Cardona, Á., Bernárdez, G., Barlet-Rose, P., Cabellos-Aparicio and A.
Proximal Policy Optimization with Graph Neural Networks for Optimal Power Flow.
DOI: 10.5220/0013462700003967
In Proceedings of the 14th International Conference on Data Science, Technology and Applications (DATA 2025), pages 347-354
ISBN: 978-989-758-758-0; ISSN: 2184-285X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
347

as networks grow increasingly complex, traditional
methods struggle to converge due to their non-linear
and non-convex characteristics (Li et al., 2021). Non-
linear ACOPF problems are often approximated us-
ing linearized DCOPF solutions to derive real power
outcomes, where voltage angles and reactive power
flows are eliminated through substitution (thus re-
moving Alternating Current (AC) electrical behav-
ior). This approximation, however, becomes invalid
under heavy loading conditions in power grids (Ow-
erko et al., 2020). Additionally, the OPF problem
is inherently non-convex because of the sinusoidal
nature of electrical generation (Wood et al., 2013).
Alternative techniques seek to approximate the OPF
solution by relaxing this non-convex constraint, em-
ploying methods such as Second Order Cone Pro-
gramming (SOCP) (Wood et al., 2013). In daily op-
erations that necessitate solving OPF within a minute
every five minutes, TSO is compelled to depend on
linear approximations. The solutions derived from
these approximations tend to be inefficient, resulting
in power wastage and the overproduction of hundreds
of megatons of CO2-equivalent annually. Today, fifty
years after the problem was first formulated, we still
lack a fast, robust solution technique for the complete
Alternating Current Optimal Power Flow (Mary et al.,
2012). For large and intricate power system networks
with numerous variables and constraints, achieving
the optimal solution for real-time OPF in a timely
manner demands substantial computing power (Pan
et al., 2022), which continues to pose a significant
challenge.
In power systems, as in many other fields, algo-
rithms of ML have recently begun to be utilized. The
latest proposals employ Graph Neural Networks, a
neural network that naturally facilitates the process-
ing of graph data (Liao et al., 2022). An increasing
number of tasks in power systems are being addressed
with GNN, including time series prediction of loads
and RES, fault diagnosis, scenario generation, opera-
tional control, and more (Diehl, 2019). The primary
advantage is that by treating power grids as graphs,
GNN can be trained on specific grid topologies and
subsequently applied to different ones, thereby gener-
alizing results (Liao et al., 2022). Conversely, Deep
Reinforcement Learning is recognized for its abil-
ity to tackle complex decision-making problems in a
computationally efficient, scalable, and flexible man-
ner—problems that would otherwise be numerically
intractable (Li et al., 2021). It is regarded as one of the
state-of-the-art frameworks in Artificial Intelligence
(AI) for addressing sequential decision-making chal-
lenges (Munikoti et al., 2024). The DRL based ap-
proach seeks to progressively learn how to optimize
power flow in electrical networks and dynamically
identify the optimal operating point. While some ap-
proaches utilize various DRL algorithms, none have
integrated it with GNN, which limits their ability to
generalize and fully leverage the information regard-
ing connections between buses and the properties of
the electrical lines that connect them. Given this con-
text, and considering that the combination of DRL
and GNN has demonstrated improvements in general-
izability and reductions in computational complexity
in other domains (Munikoti et al., 2024), we explore
their implementation in this work.
Contribution: This paper presents a significant
advancement through the proposal of a novel archi-
tecture that integrates the Proximal Policy Optimiza-
tion algorithm with Graph Neural Networks to ad-
dress the Optimal Power Flow problem. To the best of
our knowledge, this unique architecture has not been
previously applied to this challenge. Our objective
is to rigorously test the design of our architecture,
demonstrating its capability to solve the optimization
problem by effectively learning the internal dynam-
ics of the power network. Additionally, we aim to
evaluate its ability to generalize to new scenarios that
were not encountered during the training process. We
compare our solution against the DCOPF in terms of
cost, following the training of our DRL agent on the
IEEE 30 bus system. Through various modifications
to the base network, including changes in the num-
ber of edges and loads, our approach yields superior
cost outcomes compared to the DCOPF, achieving a
reduction in generation costs of up to 30%.
2 RELATED WORK
Until this paper, there had been no solution for the
OPF problem that utilized GNN to handle graph-
type data and DRL, enabling generalization and un-
derstanding the internal dynamics of the power grid.
Nevertheless, methods can be found in the literature
that employ each of the approaches independently.
Data-driven methods based on deep learning have
been introduced to solve OPF in approaches such as
(Owerko et al., 2020), (Donon et al., 2019), (Donon
et al., 2020), (Pan et al., 2022), and (Donnot et al.,
2017), among others. However, these approaches re-
quire a substantial amount of historical data for train-
ing and necessitate the collection of extensive data
whenever there is a change in the grid. Conversely,
the DRL based approach aims to gradually learn how
to optimize power flow in electrical networks and dy-
namically identify the optimal operating point. Ap-
proaches like (Zhen et al., 2022), (Li et al., 2021),
DATA 2025 - 14th International Conference on Data Science, Technology and Applications
348

(Cao et al., 2021), and (Zhou et al., 2020b) utilize
different DRL algorithms to solve the OPF, but none
incorporate GNN, resulting in a loss of generalization
capability.
3 PROBLEM STATEMENT
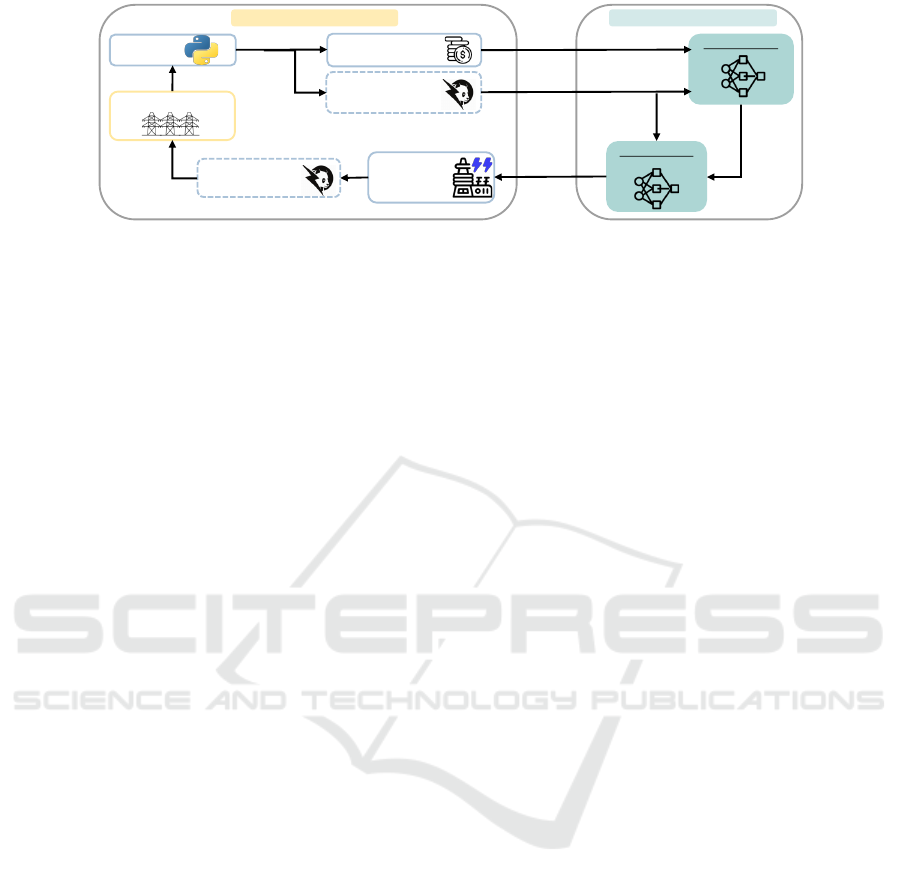
As illustrated in Figure 1, an agent is trained using
DRL. Over multiple timesteps, the agent iteratively
modifies the generation values of a power grid, aim-
ing to maximize the reward. This reward reflects the
reduction in generation cost compared to the previous
timestep. The training process begins with a base case
where the agent minimizes the cost while optimizing
the search for feasible solutions. Once trained, this
agent can be deployed to compute OPF in power grids
with altered topologies, such as the loss of an electri-
cal line due to maintenance or the disconnection of a
load. The results obtained, in terms of cost, are often
better or comparable to those achieved using DCOPF.
4 BACKGROUND
In this section, we provide the necessary background
for GNN (subsection 4.1), the DRL algorithm used
(subsection 4.2) and we expand the definition of OPF.
Commonly, OPF minimizes the generation cost, so
the objective is to minimize the cost of power gen-
eration while satisfying operating constraints and de-
mands. Some of these constraints are restrictions of
both maximum and minimum voltage in the nodes or
that the net power in each bus is equal to the power
consumed minus generated (Mary et al., 2012). At the
same time, the Power Flow (PF) or load flow refers to
the generation, load, and transmission network equa-
tions. It is a quantitative study to determine the flow
of electric power in a network under given load condi-
tions whose objective is to determine the steady-state
operating values of an electrical network (Mary et al.,
2012).
4.1 Graph Neural Networks
Graph Neural Networks are methods based on deep
learning that function within the graph domain. Due
to their effectiveness, GNN has recently emerged as
a widely utilized approach for graph analysis (Zhou
et al., 2020a). The concept of GNN was first intro-
duced by (Scarselli et al., 2009). This architecture can
be viewed as a generalization of convolutional neu-
ral networks tailored for graph structures, achieved
by unfolding a finite number of iterations. We em-
ploy Message Passing Neural Networks (MPNN), as
introduced in (Gilmer et al., 2017), which represents
a specific type of GNN that operates through an itera-
tive message-passing algorithm, facilitating the prop-
agation of information among elements in a graph
G = (N, E). Initially, the hidden states of the nodes
are set using the graph’s node-level features from the
data. Subsequently, the message-passing process un-
folds (Gilmer et al., 2017): Message (Equation 1),
Aggregation (Equation 1), and Update (Equation 2).
After a defined number of message-passing steps, a
readout function r(·) takes the final node states h
K
v
as input to generate the ultimate output of the GNN
model. The readout can predict various outcomes at
different levels, depending on the specific problem at
hand.
M
k
v
= a({m(h
k
v
, h
i
k
)}
i∈β(v)
) (1)
h
k+1
v
= u(h
k
v
, M
v
k
) (2)
4.2 Deep Reinforcement Learning
The objective in Reinforcement Learning (RL) is to
learn a behavior (policy). In RL, an agent acquires a
behavior through interaction with an environment to
achieve a specific goal (Schulman et al., 2017). This
approach is grounded in the reward assumption: all
objectives can be framed as the result of maximiz-
ing cumulative rewards. DRL is recognized for its ro-
bust ability to tackle complex decision-making chal-
lenges, making it suitable for capturing the dynamics
involved in the power flow reallocation process (Li
et al., 2021).
Within the DRL algorithms, we use Proximal
Policy Optimization, formulated in 2017 (Schulman
et al., 2017) and becoming the default reinforcement
learning algorithm at OpenAI (Schulman et al., 2017)
because of its ease of use and its good performance.
As an actor-critic algorithm, the critic evaluates the
current policy and the result is used in the policy train-
ing. The actor implements the policy and it is trained
using Policy Gradient with estimations from the critic
(Schulman et al., 2017). PPO strikes a balance be-
tween ease of implementation, sample complexity,
and ease of tuning, trying to compute an update at
each step that minimizes the cost function while en-
suring that the deviation from the previous policy is
relatively small (Schulman et al., 2017). PPO uses
Trust Region and imposes policy ratio to stay within
a small interval (policy ratio r
t
is clipped), rt will
only grow to as much as 1 + ε (Equation 4) (Schul-
man et al., 2017). The total loss function for the PPO
comprises L
CLIP
(Equation 4), the mean-square error
Proximal Policy Optimization with Graph Neural Networks for Optimal Power Flow
349
Critic: GNN
Actor: GNN
Power grid case
AGENTENVIRONMENT
Compute cost
Reward
Action
𝑉
𝜋
(𝑠)
Compute
generation
Solve PF
Convert graph to
Pandapower net
Convert graph into
Pandapower net
State
Figure 1: Overview of the PPO-based architecture for power grid optimization. The system consists of an environment and
an agent. The environment simulates a power grid case. The agent, implemented using PPO with GNN, consists of an actor-
critic structure: the Actor-GNN selects actions, while the Critic-GNN evaluates state values. The agent interacts with the
environment by receiving state information, actions (change generation), and rewards based on the computed cost.
loss of the value estimator (critic loss), and an addi-
tional term that promotes higher entropy (enhancing
exploration) (Equation 3). PPO employs Generalized
Advantage Estimate (GAE) to compute the advantage
(
ˆ
A
t
), as shown in Equation 5. This advantage method
is detailed in (Schulman et al., 2015).
L
TOTAL
= L
CLIP
+ L
VALUE
∗ k
1
− L
ENT ROPY
∗ k2 (3)
L
CLIP
(θ) =
ˆ
E
t
min(r
t
(θ)
ˆ
A
t
, clip(r
t
(θ), 1 − ε, 1 + ε)
ˆ
A
t
)
(4)
A
GAE
0
= δ
0
+ (λγ)A
GAE
1
(5)
5 PROPOSED METHOD
In this section, we outline our approach, which is
schematically illustrated in Figure 1. Both the actor
and critic of the DRL agent are represented as GNN,
while the state of the environment corresponds to the
resulting graph of the power grid. Within the DRL en-
vironment, the agent executes an action at each time
step, adjusting the power of the generator. Subse-
quently, the power grid graph is updated through a
Power Flow.
We treat our power grid as graph-structured data
by utilizing information on the power grid topology,
where electrical lines serve as edges and buses as
nodes, along with the associated loads and genera-
tions. For the electrical lines, we define features using
resistance R and reactance X (e
ACLine
n,n
= [R
n,m
, X
n,m
]).
For the buses, we incorporate voltage information, in-
cluding its magnitude V and phase angle θ, as well
as the power exchanged at that bus between the con-
nected loads and generators, represented as X
AC
n
=
[V
n
, θ
n
, P
n
, Q
n
].
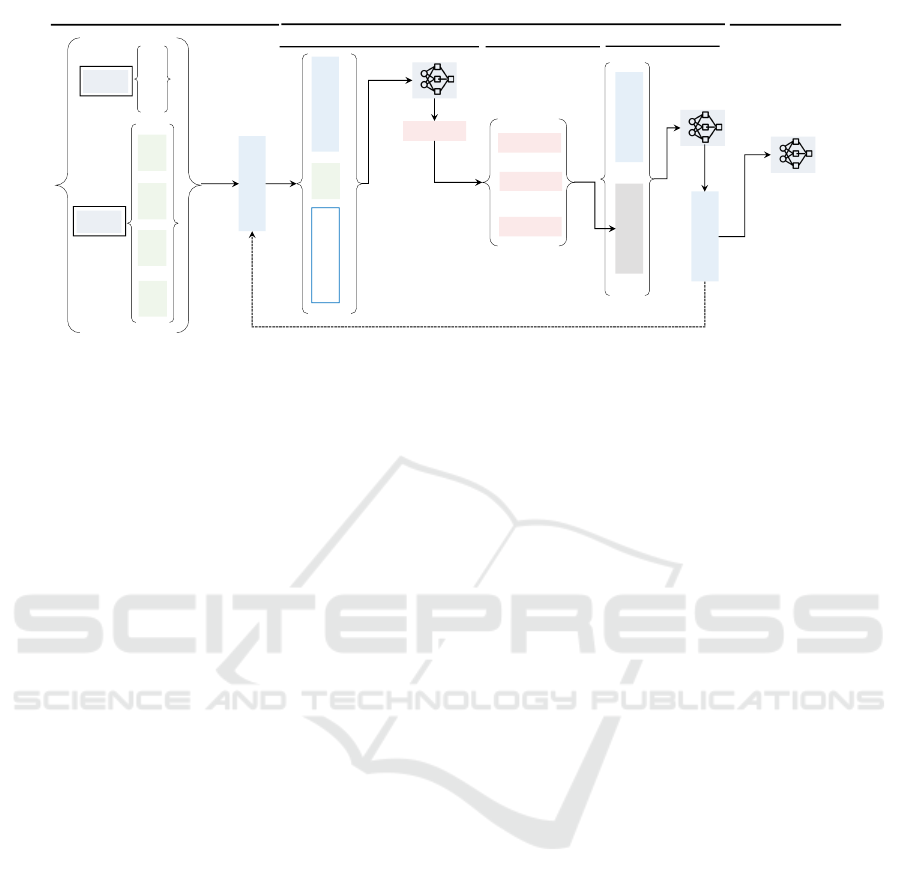
The overall architecture of the GNN is illustrated
in Figure 2, which includes the message passing and
readout components. At each message-passing step
k, each node v receives the current hidden states of
all nodes in its neighborhood and processes them in-
dividually by applying a message function m() (NN)
along with its own internal state h
k
v
and the features
of the connecting edge. These messages are then ag-
gregated through a concatenation of min, max, and
mean operations. By combining this message aggre-
gation with the node’s hidden state and updating the
combination using another NN, new hidden state rep-
resentations are generated. After a specified number
of message passing steps, a readout function r() takes
the final node states h
K
v
as input to produce the final
output of the GNN model.
For the actor, whose output is the RL policy, the
readout consists of a 3-layer MLP NN where the in-
put comprises each of the node representations. We
independently pass through this readout the represen-
tation of all nodes with a generator, resulting in N out-
put values. Each output value signifies the probabil-
ity of selecting that generator to enhance its power.
This approach to managing the readout ensures that
the architecture remains generalizable to any num-
ber of generators. These values are utilized to form
a probability distribution, from which a value is sam-
pled (representing the ID of the generator whose gen-
eration is increased at that time horizon t). The critic
employs a centralized readout that takes all node hid-
den states as inputs (by concatenating the sum, min-
imum, and maximum), producing an output that es-
timates the value function. Consequently, the input
dimension is 3*node representation with a single out-
put for the entire graph. The critic is also structured
as a 3-layer MLP.
Regarding the environment with which the agent
interacts, at each time instant t, the state is defined by
the graph updated by the Power Flow. In each horizon
step (t), the action performed by the agent involves in-
creasing the generation of one of the generator nodes.
The agent will determine which of the available gen-
DATA 2025 - 14th International Conference on Data Science, Technology and Applications
350
Step 1. Create embeddings
Eye-tracking
features
projector
Token-wise
conversion
f
1,1
f
1,2
f
1,n
f
2,1
f
2,2
f
1,n
f
t,1
f
t,2
f
t,n
…
…
RoBERTa
E
[CLS]
Step 2. Aggregate embeddings
Step 3. Compute reward
CONCAT
response 1
How do I make authentic
patatas bravas?
Input test
Best response
Frozen model
Embedding layer
E
1
E
1
E
N
…
…
…
…
C
T
1
T
1
T
N
…
[CLS]
Tok 1
Tok 1
…
Tok N
Linear
nFix
FFD
GPT TRT
fixProp
Preference
datasets
prompt
Worst response
…
response 2
response 3
response n
<eye> <eye>
ADD
+
Remapping
Remapping between
tokenizers
Transformer decoder
only architecture
x N
Regression layer
r
w
[log(𝜎(𝑟
𝜃
𝑥, 𝑦
𝑤
− 𝑟
𝜃
(𝑥, 𝑦
𝑙
)))]
r
l
Passing aggregated
embedding as input to the
transformer decoder
Using the embedding
layer of the RM
Eye-tracking
datasets
Concatenating the
prompt with the best
and worst responses
to construct the
input test
Passing
concatenated
embedding as
input to the
transformer
decoder
Preference
datasets
Eye-tracking embedding
Eye-tracking embedding
Eye-tracking embedding
Text embedding
Text embedding
Text embedding
𝒇
𝟎
𝒇
𝟏
.
.
.
𝒇
𝒏
P
Q
V
𝛉
R
X
min
R
X
max
R
X
sum
R
X
mean
Node
features
Edges
features
Prepare initial node representation
Message passing (k times)
Readout
𝒇
𝟎
𝒇
𝟏
.
.
.
𝒇
𝒏
𝒇
𝟎
𝒇
𝟏
.
.
.
𝒇
𝒏
R
X
message
min
max
message
message
mean
message
Create message
Aggregate messages
𝒇
𝟎
𝒇
𝟏
.
.
.
𝒇
𝒏
𝒇
𝟎
𝒇
𝟏
.
.
.
𝒇
𝒏
Update
Node representation
Neighbours' messages
Figure 2: GNN architecture. Both critic and actor employ the same GNN architecture, differing only in their readout layers.
The process initiates with the preparation of initial node representations, leveraging both node and edge features. Specifically,
the GNN’s input comprises the electrical parameters of the grid. During the message-passing phase (repeated k times), each
node generates messages based on its features, which are subsequently aggregated from its neighbors. These aggregated
messages refine the node representations via an update function. Ultimately, in the readout phase, the actor utilizes these
refined representations to compute the action, while the critic uses them to estimate the value function.
erators will have its generation increased by one por-
tion. For each generator, the power range between its
maximum and minimum power is divided into N por-
tions. When a generator reaches its maximum power,
generation cannot be increased, resulting in the power
grid (and thus the state of the environment) remaining
unchanged. If the PF does not converge, it indicates
that with the given demand and generation, meeting
the constraints is not feasible; we refer to this situ-
ation as an infeasible solution. When initializing an
episode (the initial state of the power grid), we aim
for the generation to be as low as possible, allowing
the agent to raise it until it reaches the optimum. Ad-
ditionally, we must consider that if the generation is
too low in the initial time steps, the solution may be-
come infeasible. Consequently, we decide to set the
minimum generation at 20%. The reward at time t is
calculated as the improvement in the solution’s cost
compared to t − 1, as shown in Equation 6. The re-
ward is positive during a time step when the agent’s
action results in a decrease in generation cost. Con-
versely, if the agent selects a generator that is already
at its maximum capacity, leads to an infeasible solu-
tion, or increases the cost, the reward will be negative.
r(t) =
MinMaxScaler(cost) − Last(MinMaxScaler(cost))
cte
1
if selected generator already in P
max
cte
2
if solution no feasible
(6)
6 PERFORMANCE EVALUATION
This section outlines the experimentation conducted
to validate the proposed approach, the data utilized,
and discusses the results obtained.
Overview: We train the agent using a base case
and subsequently evaluate its performance in modi-
fied scenarios. On one hand, we adjust the number of
loads and their values, as real power grid operations
involve continuous changes in loads. On the other
hand, we simulate the unavailability of certain elec-
trical lines due to breakdowns or maintenance. This
approach demonstrates that the agent, once trained,
can generalize to previously unseen cases. We com-
pare the cost differences between our method and the
industry standard method, the DCOPF. Our goal is
to demonstrate that our method can produce a solu-
tion that is equal to or better than the DCOPF, while
avoiding its disadvantages.
6.1 Experimental Setting
We train the agent using the IEEE 30 bus system as
our case study (Figure 3). This system consists of
thirty nodes, forty links, five generators, and twenty
loads, with all generators modeled as thermal gener-
ators. We utilize Pandapower, a Python-based, BSD-
licensed power system analysis tool (Thurner et al.,
2018). This tool enables us to perform calculations
such as OPF using the IPOPT optimizer and PF analy-
sis, which we employ to evaluate our costs and update
our environment. Additionally, this library allows us
Proximal Policy Optimization with Graph Neural Networks for Optimal Power Flow
351
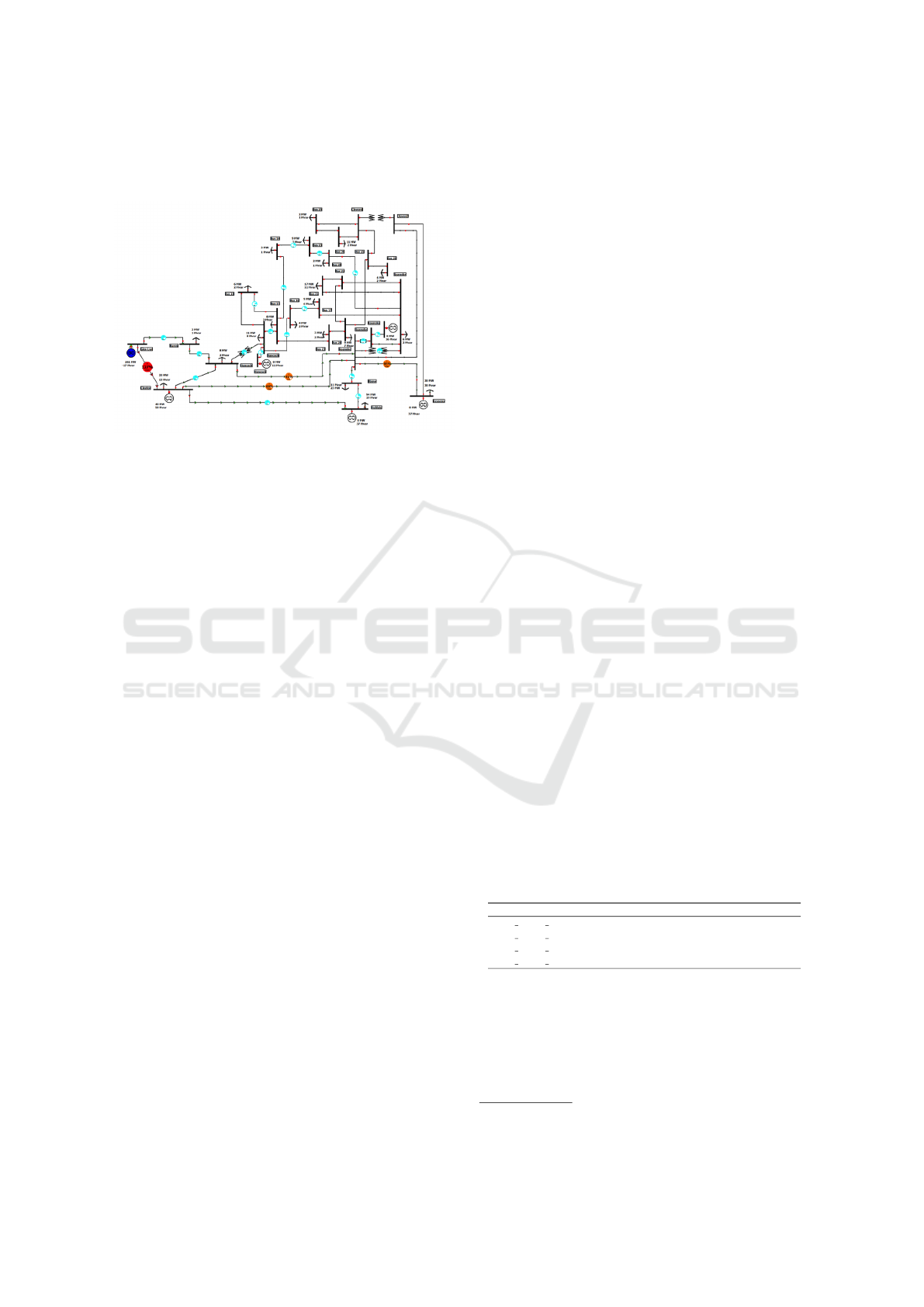
to verify the physical feasibility of our solutions by
ensuring they comply with PF constraints.
Figure 3: IEEE 30 bus system (Fraunhofer, 2022).
The objective of the training is to optimize the pa-
rameters so that the actor becomes a good estimator of
the optimal global policy and the critic learns to ap-
proximate the state value function of any global state.
Many hyperparameters can be modified, and they are
divided into different groups. Grid search has been
performed on many of them, and the final selected
values of the most important ones are shown below.
• Related to learning loop: Minibatch (25), epochs
(3) and optimizer (ADAM), with its parameters
like learning rate lr (0.003).
• Related to the power grid: Generator portions
(50).
• Related to RL: Episodes (500), horizon size T
(125), reward cte
1
(-1) and cte
2
(-2).
• Actor and Critic GNN: Message iterations k (4),
node representation size (16). The NN to create
the messages is a 2-layer MLP and the updated
one is 3-layer MLP.
PPO is an online algorithm that, similar to other re-
inforcement learning algorithms, learns from experi-
ence. The training pipeline is organized as follows:
• An episode of length T is generated by fol-
lowing the current policy. While at the same
time the critic’s value function V evaluates each
visited global state; this defines a trajectory
{
s
t
, a
t
, r
t
, p
t
, V
t
, s
t+1
}
T −1
t=0
.
• This trajectory is used to update the model pa-
rameters –through several epochs of minibatch
Stochastic Gradient Descent– by maximizing the
global PPO objective.
The same process of generating episodes and updat-
ing the model is repeated for a fixed number of iter-
ations to guarantee convergence. MinMaxScaler has
been used for data preprocessing for node features,
edge features and generation output. More implemen-
tation details can be found in the public repository
1
.
6.2 Experimental Results
Once the training has been done and the best com-
bination of hyperparameters, network design and re-
ward modelling has been chosen, the best checkpoint
of the model is selected to compute OPF in different
networks. To validate our solution, we use the devi-
ation of the cost concerning the minimum cost, the
one obtained with the ACOPF (%DRL+OPF perf. in
Table 1 - Table 3). We compare it with the cost devia-
tion obtained with DCOPF (%DCOPF perf in Table 1
- Table 3). We compute the ratio between these two
deviations. We calculate the improvement ratio by di-
viding the first value by the second, which reflects the
enhancement over the DCOPF.
Once the model is trained, only the actor part is
used in the evaluation. During T steps of an episode,
the actions sampled from the probability distribution
obtained from the actor for each state of the network
are executed. Finally, the mean cost of the best ten
evaluations is measured, as well as the convergence of
the problem. We evaluate 100 times for each test case.
In Table 1 - Table 3, it is highlighted between the devi-
ation in % of our solution concerning the OPF’s one
and the deviation obtained by the DCOPF. We also
assess the convergence and physical feasibility of our
solution, finding that it was feasible in the majority of
cases.
First, all network loads are varied by multiplying
their value by a random number between a value less
than 1 and a value higher than 1 (Table 1). Each row in
the table is a test in which the name specifies the up-
per and lower percentages by which loads have been
varied. In all tests, performance with our method is
better with ratios of up to 1.30.
Table 1: Results on case IEEE 30 varying loads from base
case.
% DRL+OPF perf. %DCOPF perf. ratio
load inf0.1 sup0.1 0,75 0,77 1,02
load inf0.2 sup0.1 0,59 0,68 1,16
load inf0.3 sup0.1 0,53 0,73 1,38
load inf0.4 sup0.1 0,61 0,67 1,10
After varying the load value, we experiment with
removing n loads from the grid. We randomly choose
several loads, remove them from the network and
evaluate the model (Table 2). Each row in the ta-
ble is a test in which the name specifies the number
of loads that have been removed. Our cost deviation
1
https://github.com/anlopez94/opf_gnn_ppo
DATA 2025 - 14th International Conference on Data Science, Technology and Applications
352
is lower or similar than the DCOPF even by elimi-
nating almost 50% of the loads. Finally, in Table 3
we show the results of creating networks from the
original one by removing one or more electrical lines
(edges). Each row in the table is a test in which the
name specifies the number of power lines removed.
Table 2: Results on case IEEE 30 removing loads from base
case.
% DRL+OPF perf. %DCOPF perf. ratio
load 1 0,67 0,72 1,07
load 2 0,71 0,71 1,00
load 3 0,67 0,67 1,00
load 4 1,06 0,68 0,65
load 5 0,61 0,64 1,05
load 8 1,10 0,63 0,52
Table 3: Results on case IEEE 30 removing edges from base
case.
% DRL+OPF perf. %DCOPF perf. ratio
edge 1 0,73 0,77 1,05
edge 2 0,41 1,16 2,83
edge 3 0,62 0,61 0,99
edge 4 0,65 0,88 1,36
edge 5 0,90 0,96 1,07
edge 8 0,59 0,89 1,51
In experiments removing electrical lines (Table 3)
as more power lines are removed (more than 8), some-
times, the agent does not find a good feasible solu-
tion (no convergence). When we experimented with
changing the load values in the second test (Table 1),
we observed that increasing the loads by more than
10% caused the tests to fail to converge. With the
other changes in topology, 100% of tests converged,
so we can conclude that our model is capable of gen-
eralizing to unseen topologies (based on the trained
one).
7 DISCUSSION
We have successfully designed a solution to address
the OPF, capable of generalization, utilizing DRL and
GNN. The network topology has been modified, and
we have demonstrated that the agent can identify a
strong solution (with performance closely aligned to
the current industry standard DCOPF), ensuring that
this solution is both feasible and compliant with the
constraints. Thanks to the design of GNN, it can be
trained on various cases and subsequently applied to
different scenarios. In this paper, we validate that this
architecture effectively tackles OPF, showcasing the
generalization capability of our solution by consid-
ering modifications to the network scenario encoun-
tered during training (including different loads and
a reduction in the number of edges). By integrating
these two technologies for the first time, we conclude
that their combination is feasible, leveraging the ad-
vantages of both. Our findings indicate that the pro-
posed architecture represents a promising initial step
toward solving the OPF. Future work could explore
the incorporation of additional features in the node
representation, such as the maximum and minimum
allowable voltage and model other types of electrical
generation.
ACKNOWLEDGMENTS
This research is supported by the Industrial Doctorate
Plan of the Department of Research and Universities
of the Generalitat de Catalunya, under Grant AGAUR
2023 DI060.
REFERENCES
Cao, D., Hu, W., Xu, X., Wu, Q., Huang, Q., Chen, Z.,
and Blaabjerg, F. (2021). Deep reinforcement learning
based approach for optimal power flow of distribution
networks embedded with renewable energy and stor-
age devices. Journal of Modern Power Systems and
Clean Energy, 9(5):1101–1110.
Diehl, F. (2019). Warm-starting ac optimal power flow with
graph neural networks. In 33rd Conference on Neu-
ral Information Processing Systems (NeurIPS 2019),
pages 1–6.
Donnot, B., Guyon, I. M., Schoenauer, M., Marot, A., and
Panciatici, P. (2017). Fast power system security anal-
ysis with guided dropout. ArXiv, abs/1801.09870.
Donon, B., Cl
´
ement, R., Donnot, B., Marot, A., Guyon,
I., and Schoenauer, M. (2020). Neural networks for
power flow: Graph neural solver. In Electric Power
Systems Research, volume 189, page 106547.
Donon, B., Donnot, B., Guyon, I., and Marot, A. (2019).
Graph Neural Solver for Power Systems. In IJCNN
2019 - International Joint Conference on Neural Net-
works, Budapest, Hungary.
Fraunhofer, IEE, U. o. K. (2022). Pandapower documenta-
tion.
Gilmer, J., Schoenholz, S. S., Riley, P. F., Vinyals, O., and
Dahl, G. E. (2017). Neural message passing for quan-
tum chemistry. In International conference on ma-
chine learning, pages 1263–1272. PMLR.
Li, J., Zhang, R., Wang, H., Liu, Z., Lai, H., and Zhang,
Y. (2021). Deep reinforcement learning for optimal
power flow with renewables using graph information.
ArXiv, abs/2112.11461.
Liao, W., Bak-Jensen, B., Pillai, J. R., Wang, Y., and Wang,
Y. (2022). A review of graph neural networks and
Proximal Policy Optimization with Graph Neural Networks for Optimal Power Flow
353

their applications in power systems. Journal of Mod-
ern Power Systems and Clean Energy, 10(2):345–360.
Mary, A., Cain, B., and O’Neill, R. (2012). History of opti-
mal power flow and formulations. Fed. Energy Regul.
Comm., 1:1–36.
Munikoti, S., Agarwal, D., Das, L., Halappanavar, M., and
Natarajan, B. (2024). Challenges and opportunities
in deep reinforcement learning with graph neural net-
works: A comprehensive review of algorithms and ap-
plications. IEEE Transactions on Neural Networks
and Learning Systems, 35(11):15051–15071.
Owerko, D., Gama, F., and Ribeiro, A. (2020). Optimal
power flow using graph neural networks. In ICASSP
2020 - 2020 IEEE International Conference on Acous-
tics, Speech and Signal Processing (ICASSP), pages
5930–5934.
Pan, X., Chen, M., Zhao, T., and Low, S. H. (2022). Deep-
opf: A feasibility-optimized deep neural network ap-
proach for ac optimal power flow problems. In IEEE
Systems Journal, pages 1–11.
Scarselli, F., Gori, M., Tsoi, A. C., Hagenbuchner, M.,
and Monfardini, G. (2009). The graph neural net-
work model. IEEE Transactions on Neural Networks,
20:61–80.
Schulman, J., Moritz, P., Levine, S., Jordan, M., and
Abbeel, P. (2015). High-dimensional continuous con-
trol using generalized advantage estimation. ArXiv,
abs/1506.02438.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017). Proximal policy optimization al-
gorithms. ArXiv, abs/1707.06347.
Thurner, L., Scheidler, A., Sch
¨
afer, F., Menke, J.-H., Dol-
lichon, J., Meier, F., Meinecke, S., and Braun, M.
(2018). Pandapower—an open-source python tool for
convenient modeling, analysis, and optimization of
electric power systems. IEEE Transactions on Power
Systems, 33(6):6510–6521.
Wood, A. J., Wollenberg, B. F., and Sheble, G. B. (2013).
Power Generation, Operation, and Control. John Wi-
ley & Sons, Hoboken, NJ, USA, 3rd edition.
Zhen, H., Zhai, H., Ma, W., Zhao, L., Weng, Y., Xu,
Y., Shi, J., and He, X. (2022). Design and tests of
reinforcement-learning-based optimal power flow so-
lution generator. Energy Reports, 8:43–50. 2021 The
8th International Conference on Power and Energy
Systems Engineering.
Zhou, J., Cui, G., Hu, S., Zhang, Z., Yang, C., Liu, Z.,
Wang, L., Li, C., and Sun, M. (2020a). Graph neu-
ral networks: A review of methods and applications.
AI Open, 1:57–81.
Zhou, Y., Zhang, B., Xu, C., Lan, T., Diao, R., Shi, D.,
Wang, Z., and Lee, W.-J. (2020b). A data-driven
method for fast ac optimal power flow solutions via
deep reinforcement learning. Journal of Modern
Power Systems and Clean Energy, 8(6):1128–1139.
DATA 2025 - 14th International Conference on Data Science, Technology and Applications
354
