
4,500 Seconds: Small Data Training Approaches for Deep UAV Audio
Classification
Andrew P. Berg
1 a
, Dr. Qian Zhang
2 b
and Dr. Mia Y. Wang
1 c
1
Department of Computer Science, College of Charleston, Charleston, SC, U.S.A.
2
Department of Engineering, College of Charleston, Charleston, SC, U.S.A.
Keywords:
UAV Audio Classification, Deep Learning, Neural Networks, Parameter Efficient Fine Tuning, Transformers.
Abstract:
Unmanned aerial vehicle (UAV) usage is expected to surge in the coming decade, raising the need for height-
ened security measures to prevent airspace violations and security threats. This study investigates deep learn-
ing approaches to UAV classification focusing on the key issue of data scarcity. To investigate this we opted
to train the models using a total of 4,500 seconds of audio samples, evenly distributed across a 9-class dataset.
We leveraged parameter efficient fine-tuning (PEFT) and data augmentations to mitigate the data scarcity.
This paper implements and compares the use of convolutional neural networks (CNNs) and attention-based
transformers. Our results show that, CNNs outperform transformers by 1-2% accuracy, while still being more
computationally efficient. These early findings, however, point to potential in using transformers models; sug-
gesting that with more data and further optimizations they could outperform CNNs. Future works aims to
upscale the dataset to better understand the trade-offs between these approaches.
1 INTRODUCTION
Driven by affordability and rising popularity the use
of commercial, military, and civil unmanned aerial
vehicles (UAVs) is projected to increase in the next
decade (Pangarkar, 2024). With this in mind, there
is a need for a robust and highly accurate classifica-
tion to prevent malicious and consequential security
threats.
Common approaches to UAV classification in-
clude radio, visual, and acoustic approaches. As
shown in (Dafrallah and Akhloufi, 2024): three com-
mon approaches are visual, radio frequency, and
acoustic based. For each method, the constraining
factor is the quantity and quality of the dataset. The
inherent issue is that it is difficult to collect large
amounts of UAV samples; for the simple fact that new
military and consumer technologies advance yearly.
a
https://orcid.org/0009-0000-1148-7174
b
https://orcid.org/0000-0003-3166-4291
c
https://orcid.org/0000-0003-2954-0855
∗
Code Repository https://github.com/AndrewPBerg/U
AV Classification
♯
Experiment Tracking https://wandb.ai/andberg9-self/
projects
†
Augmentation Notebook https://colab.research.googl
e.com/drive/1bl4RTQd7ENnMYEc4thwBwtocF-q1NYp2?
usp=sharing
Therefore, any solution to this problem needs to be
able to cope with the scarcity of data.
This paper studies the difference in performance
in audio classification models. We compare a cus-
tom convolutional neural network (CNN) against a
pre-trained attention-based transformer. An important
consideration is that the transformer model requires
significantly more data to train from scratch.
This paper compares the transformer’s results with
a custom CNN model, using a scaled 9-class audio
UAV dataset. To best compare the results, we opted
for a fully attention-based transformer vs. a custom
CNN. Because of the aforementioned data scarcity,
training from scratch is not feasible on the larger
transformer model, instead we opted to use the pre-
trained Audio Spectrogram Transformer (AST) for
this study.
This paper builds on top of the work presented in
(Wang, 2023), in which a 22-class UAV audio dataset
is presented. This dataset includes 100 samples of 5
second length each (11,000 seconds). For our pur-
poses, we shift from 22 to 9 classes (4,500 seconds).
Importantly, we chose to scale the dataset down to
simulate the extreme data scarcity problem and to
force any solution we test to overcome extreme data
scarcity. Solutions use techniques like data augmenta-
tion and parameter efficient fine-tuning (PEFT), com-
paring the accuracies of the CNN and transformer
64
Berg, A. P., Zhang, Q., Wang and M. Y.
4,500 Seconds: Small Data Training Approaches for Deep UAV Audio Classification.
DOI: 10.5220/0013462400003967
In Proceedings of the 14th International Conference on Data Science, Technology and Applications (DATA 2025), pages 64-71
ISBN: 978-989-758-758-0; ISSN: 2184-285X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

models.
In later works we aim to answer at what quantity
of data and with what techniques, will transformers
be more viable than CNNs; and further which kind of
training systems enable this with a small data prob-
lem?
We start by explaining our background knowl-
edge, then move to show our methodology for tun-
ing each model, and the techniques applied. Finally
we explain the results of the tracked hyper parameter
tuning and k-fold validation.
2 LITERATURE REVIEW
Much work has been done in machine and deep learn-
ing on audio classification and detection problems
(Zaman et al., 2023). CNN are proven to be the most
effective model, and translate well to other domain
specific audio sets. As shown in (Wang et al., 2022),
a CNN approach works well on UAV audio classifica-
tion. However, a key issue with any approach to UAV
audio classification is the lack of data. A 22 class
UAV audio dataset, as proposed in (Wang, 2023),
helps to alleviate this data gap, and studies the results
of various machine learning (ML) and deep learning
(DL) approaches. For this study we decided to scale
down that dataset to 9 classes to better understand the
effects of specific small data approaches shown later.
This paper also bases itself on acoustic data aug-
mentation studies. (K
¨
ummritz, 2024) and (Ferreira-
Paiva et al., 2022) prove the effectiveness of augmen-
tations on model performance and outline the most
relevant augmentations for UAVs.
Further, this paper approaches the modeling for
small scale UAV classification using both CNN and
attention-based transformer models (Vaswani et al.,
2023); comparing the best results from each.
A proof of concept approach for small datasets
in the medical domain, using CNNs (Schmitt and
Schuller, 2019), shows precedent and demand for
small dataset models; further motivating the small
data approach.
We propose that to make transformers work on
such a small dataset, one must use a pre-trained trans-
former model. In this paper we use a pre-trained audio
transformer and fine-tune to our custom datset. Fine-
tuning models with a variety of PEFT techniques is
a proven approach across application types; as shown
in (Xu et al., 2023) and (Balne et al., 2024). This
approach later proves that it is possible to make a pre-
trained transformer competitive with the CNN’s re-
sults.
3 METHODOLOGY
3.1 Tools
The following lists all of the technologies important
to the technical implementation of this study. Py-
Torch, as introduced (Paszke et al., 2019), is an es-
sential deep learning framework for working with ten-
sors, CUDA, and neural networks. This paper used it
to create and modify the models, tensor datasets and
iterable data loaders used throughout the experimen-
tation. We used version 2.4.1 (PyTorch, 2024a).
Torchaudio, is a domain-specific library based on
PyTorch, for signal and audio processing with torch
tensors. This paper used it to implement the data load-
ing and parts of the feature extraction. We used ver-
sion 2.4.1 (PyTorch, 2024b).
Weights & Biases is a cloud-based machine/deep
learning platform for robust experiment tracking
and sharing. We used the package version 0.18.1
(Weights&Biases, 2024).
Docker is a robust server tool used for container-
ized virtual environments for server-side deployment
of code. We used it to talk with our local training
server and maintain a consistent training environment.
We used docker version 27.3.1 (Docker, 2024)
Transformers is an open-source library to connect
with Hugging Face’s publicly hosted models, and in-
tegrate them into our code. As cited, it expands the
amount of models available for all deep learning tasks
(Wolf et al., 2020). We used version 4.44.2 (Hugging-
Face, 2024b).
Parameter Efficient Fine-Tuning (PEFT) library is
an open-source project from Hugging Face for ab-
stracting the use of adapters. This was used to imple-
ment the majority of the adapters in the transformers
experiments. We used version 0.12.0 (HuggingFace,
2024a).
Audiomentations is a open source library for data
augmentation. This paper used the pre-built augmen-
tations to process audio data and built custom aug-
mentations. We used version 0.35.0 (Jordal, 2024).
Other important python packages used in our
code are: TorchMetrics(LightningAI, 2024), SciKit-
learn(Scikitlearn, 2024), Librosa(Librosa, 2024),
Matplotlib(Matplotlib, 2024), Telebot (Telebot,
2024), and NumPy(NumPy, 2024).
3.2 Environment
All training runs were performed on a local server
with a AMD Theadripper 4950x, 128Gbs of RAM,
and two NVIDIA GeForce RTX 4090s; both equipped
with 24Gbs of VRAM. This was run on an Ubuntu
4,500 Seconds: Small Data Training Approaches for Deep UAV Audio Classification
65
Virtual Environment (version = 20.04). The server’s
local CUDA version was 12.2 and the virtual envi-
ronment’s was 12.1. All of the code is run in Python
version.
3.3 Custom UAV Dataset
The dataset used in this paper is based on a 22 class
custom dataset as presented in (Wang, 2023). As
of the time of writing, the dataset contains 31 data
classes, each containing 100 instances of 5 second au-
dio samples (15,500 seconds). For this paper’s scope
and scale we decided to use 9 of the total 31. That is
4,500 seconds of original audio data. Importantly, we
decided not to study the full 31 class dataset in this
paper to see what is possible on the subset and mov-
ing forward how our approach changes. The names
and manufacturers of the UAVs are marked in Table 1
Table 1: UAVs included in the Dataset.
Index Manufacturer Model
0 Autel Evo 2
1 Self-build David Tricopter
2 DJI Avata
3 DJI FPV
4 DJI Matrice 200
5 DJI Mavic Air 2
6 DJI Mavic Mini 1
7 DJI Mavic Mini 2
8 DJI Mavic 2 Pro
3.4 Data Exploration
The data used in this paper is proprietary and private,
meaning that this paper can only describe how the
data is unique, rather than providing actual files. The
UAV audio samples are continuous, with there being
no natural silence in the sample. The samples are
not clean, however; environmental noises like: wind,
cars, people are included.
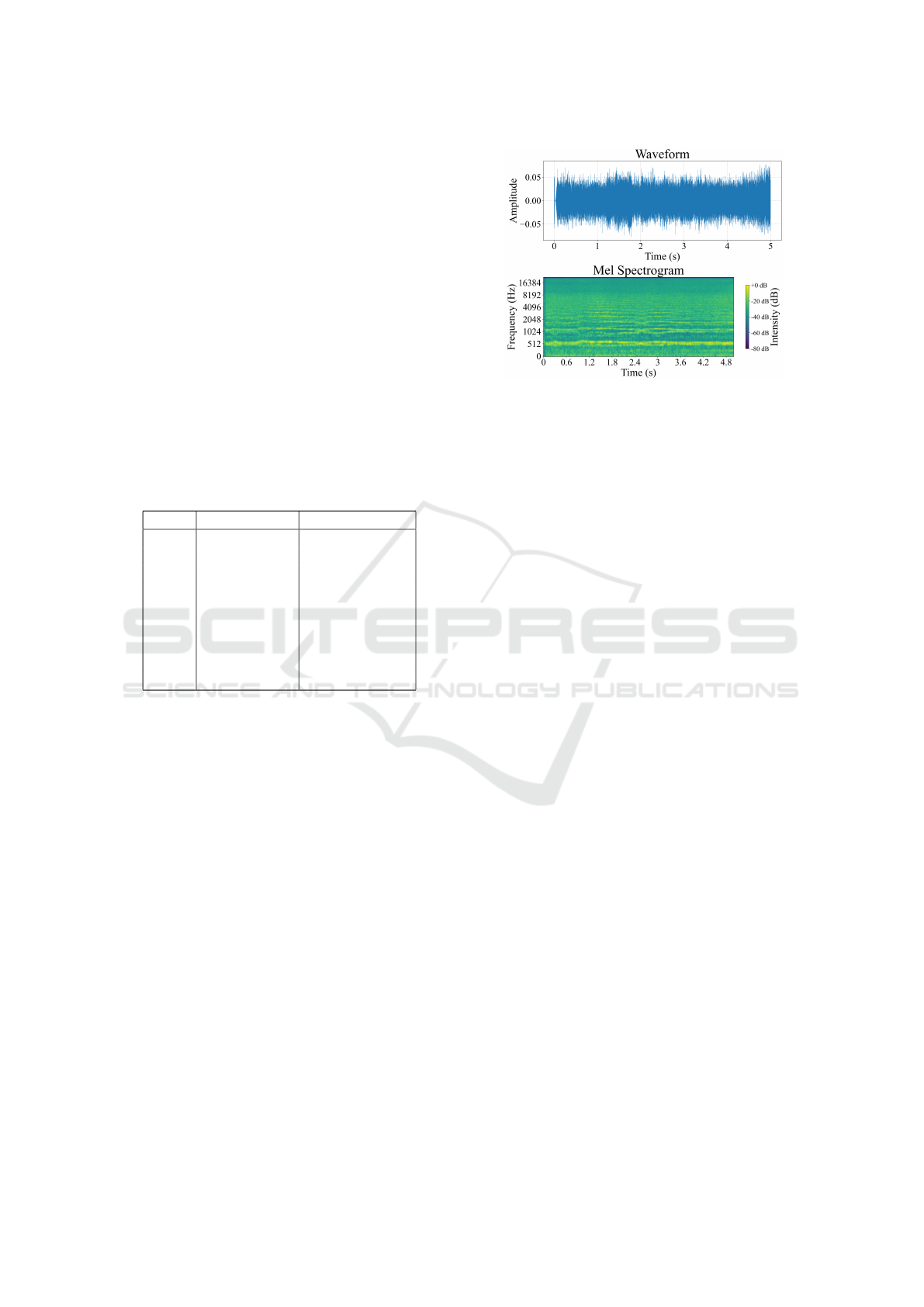
3.5 Feature Extraction
Feature extraction takes the complex and noisy wave-
form data and converts into a more compact, and
more usable format. As illustrated in 1, both the cus-
tom CNN and pre-trained AST models use the mel-
spectrogram feature extraction to capture the relative
frequency content of the sample. Other popular op-
tions for audio feature extraction are MFCC, and log-
mel-spectrograms. Interestingly, feature extracted au-
dio samples function much like two-dimensional im-
ages.
Figure 1: Audio Analysis of DJI Tello Drone.
3.6 Data Standardization
Some of the samples were recorded in mono and oth-
ers dual-audio formats. Upon initialization all data is
fixed so that every sample has one channel and a sam-
ple rate of 16000 Hz. If the audio is not exactly 5
seconds length, then the sample will either be padded
or clipped to correctly fit into the model.
3.7 Data Augmentation
With such a limited number of samples, data augmen-
tation is crucial for model performance and gener-
alization. For our purposes we only augmented the
training and validation runs. The correct combination
of augmentations yield performance gains, specifi-
cally, inflating the training and train validation sets.
Inflating the dataset with 3 augmentations per train-
ing and validation sample can add 2 times the origi-
nal samples to the training and validation splits, fur-
ther increasing generalization. Of course, more qual-
ity samples are always better than artificial ones, this
approach is impractical for UAV datasets.
3.8 Relevant Augmentations
We found that the most relevant augmentations ex-
periment for UAVs are: sin distortion, tanh distor-
tion, time stretch, pitch shift, gaussian noise, and po-
larity inversion (K
¨
ummritz, 2024). We have com-
piled a Google Colab notebook for audio augmenta-
tion demonstration and visualization purposes (Berg,
2024a). Note, all data augmentations take place be-
fore feature extraction.
3.9 Convolutional Neural Network
The convolutional neural network (CNN) implemen-
tation is based on (Wang et al., 2022). How-
DATA 2025 - 14th International Conference on Data Science, Technology and Applications
66

ever, Where this paper’s implementation diverges
is in adding convolutional layers and favoring mel-
spectrograms over the use of MFCC for feature ex-
traction.
3.10 CNN Architecture
Our custom CNN architecture has about 5 million
parameters, using 3 convolutional layers and 2 fully
connected layers after the convolutional passes. The
models outputs a tensor with an output shape of 9.
The model is visualized in figure 2.
Total params: 5,006,825
TorchCNN(
(conv1): Sequential(
(0): Conv2d(1, 16)
(1): ReLU()
(2): MaxPool2d()
(3): BatchNorm2d()
)
(conv2): Sequential(
(0): Conv2d(16, 32)
(1): ReLU()
(2): MaxPool2d()
(3): BatchNorm2d()
)
(conv3): Sequential(
(0): Conv2d(32, 64)
(1): ReLU()
(2): MaxPool2d()
(3): BatchNorm2d()
)
(fc1): Linear(19456, 256)
(dropout): Dropout()
(fc2): Linear(256, 9)
)
Figure 2: Custom CNN Architecture.
3.11 Audio Spectrogram Transformer
The Audio Spectrogram Transformer (AST): (Gong
et al., 2021) breaks fully away from the use of con-
volutional layers in favor of a fully attention based ar-
chitecture. Notably, AST is a fine-tuned version of the
Vision transformer (ViT) (Dosovitskiy et al., 2021),
which was a landmark model which implemented a
fully attention based model for image recognition.
AST is trained using cross-modality transfer
learning. This is because the audio spectrogram and
image data have similar formats. AST is trained on
AudioSet (Gemmeke et al., 2017), which is a collec-
tion of over 20 million seconds with 537 class labels.
Classes include human sounds, animal sounds, natu-
ral sounds, music, sounds of objects, source ambigu-
ous sounds, environment & background noises.
Notably the AST author’s express that the main
disadvantage of a transformer is the need for more
data to train on. Then AST was further fine-tuned and
tested on ESC-50 (Piczak, 2015) and Speech Com-
mands V2 Datasets (Warden, 2018). AST achieved
a precision of 95.6% and 98.1% using 5-fold cross-
validation.
3.12 AST Architecture
This paper uses the MIT/ast-finetuned-audioset-10-
10-0.4593 checkpoint hosted on Huggingface (MIT,
2024). The model architecture is visualized in fig-
ure 3. First the model converts an input into embed-
dings. Next is the encoder layer which contains 12
transformer blocks, each with a self-attention, inter-
mediate, and normalization layers. Finally after the
transformer blocks, the model ends with a classifier
head, which outputs a tensor with an output shape of
9.
3.13 Feature Extraction
AST takes audio mel-spectrograms as inputs, which
is done using the Transformers library abstraction in
the form of ASTFeatureExtractor.
3.14 Model Fine-Tuning & PEFT
Techniques
Because we are using a checkpoint of AST, we fine-
tuned AST to our dataset. As opposed to the CNN ap-
proach. which we trained fully from random weights.
Naive approaches to fine-tuning include full fine-
tuning and classifier fine-tuning. Full fine-tuning is
training all of a model’s parameters and classifier
trains only the final classifier. These are denoted as
Full and Classifier in the results section.
In order to generalize the pre-trained weights we
approached fine-tuning very carefully. Our leading
technique to makeup for the lack of data quantity is to
use parameter efficient fine-tuning. We implemented
this in Hugging Face’s PEFT library as referenced in
the 3.1. This approach works by freezing all of the
model’s layers and only training added specialized
adapter layers.
3.14.1 Low-Rank Adaptation (LoRA)
LoRA allows a model to train some dense layers in
a neural network indirectly by optimizing added rank
decomposition matrices directly after the dense lay-
ers (Hu et al., 2021). LoRA layers are added evenly
across the model. All while keeping the pre-trained
4,500 Seconds: Small Data Training Approaches for Deep UAV Audio Classification
67

Total params: 86,195,721
AST(
(audio_spectrogram_transformer): ASTModel(
(embeddings): ASTEmbeddings(
(patch_embeddings):ASTPatchEmbeddings(
(projection): Conv2d(1, 768)
)
(dropout): Dropout()
)
(encoder): ASTEncoder(
(layer): ModuleList(
(0-11): 12 x ASTLayer(
(attention): ASTSdpaAttention(
(attention):ASTSdpaSelfAttention(
(query): Linear(768, 768)
(key): Linear(768, 768)
(value): Linear(768, 768 )
(dropout): Dropout()
)
(output): ASTSelfOutput(
(dense): Linear(768, 768)
(dropout): Dropout()
)
)
(intermediate): ASTIntermediate(
(dense): Linear(768, 3072)
(intermediate_act_fn): GELU()
)
(output): ASTOutput(
(dense): Linear(3072, 768)
(dropout): Dropout()
)
(LayerNorm): (768,))
(LayerNorm): (768,))
)
)
)
(layernorm): LayerNorm
)
(classifier): ASTMLPHead(
(LayerNorm): (768,))
(dense): Linear(768, 9)
)
)
Figure 3: AST architecture.
weights frozen. Initially tested using Large Lan-
guage Models (LLMs) like GPT-2 and RoBERTA;
LoRA demonstrated similar performance to full fine-
tuning while benefiting from significantly faster train-
ing time. This adds about 750,000 layers, where the
LoRA rank = 8, and lora alpha = 16. These will be a
part of the hyper-parameter tuning 4.1.
3.14.2 Adaptive Low-Rank Adaptation
(AdaLoRA)
This is a new and improved version of LoRA pro-
posed in (Zhang et al., 2023) that adaptively budgets
LoRA’s layer ”budget”. Essentially, as the model is
trained, only the most important layers are assigned
with higher ranks and while the other non-important
layers are de-ranked or even pruned. This adds more
layers initially, but as described earlier will change
during training. This allows us to set the rank and
LoRA alpha much higher than computationally vi-
able in a standard LoRA. For example, one could set
the initial rank budget = 100 and the target rank to
= 16 (and the LoRA alpha = 16) would start with
16,673,800 added layers, this is about equivalent if
you were to set a standard LoRA with (r=100, a=16),
however as described earlier, this will change in ef-
fect as the adaptive budget will reduce the rank over
the course of the training.
3.14.3 Orthogonal Fine-Tuning (OFT)
Orthogonal literally means involving right-angles.
Developed for text-to-image generation in mind, this
fine-tuning approach uses orthogonal multiplication
layers that sit at the ends of targeted blocks, then mul-
tiplying the output diagonally supposedly mimicking
the angles in an image. (Qiu et al., 2024). with a rank
= 16 this approach adds about 9 million new layers.
3.14.4 Infused Adapter by Inhibiting and
Amplifying Inner Activations (Ia3)
Ia3 adds lightweight trainable layers after the model’s
attention and intermediate activation layers to effi-
ciently rescale the model’s activation layers against a
learned vector (Liu et al., 2022). Initially proposed for
LLMs, the founding ia3 paper demonstrates that the
adapter had greater performance than LoRA adapters
with even less added layers. While targeting the ac-
tivation layers of the key, value, query, and dense at-
tention layers ia3 only adds about 84,000 additional
layers.
3.14.5 Discrete Fourier Transformation Fine
Tuning (Fourier FT)
Fourier FT bases itself on the LoRA approach -
adding low-rank structures - but instead learns a set of
spectral coefficients using the Fourier transformation
(Gao et al., 2024). Effectively this compresses the
amount of change resulting in less layers added to the
model, which in turn leads to higher efficiency. With
using a scaling = 100 and number of frequency coef-
ficients = 3000 we can expect to add about 220,000
layers.
DATA 2025 - 14th International Conference on Data Science, Technology and Applications
68

4 EXPERIMENTS & RESULTS
4.1 Tuning
With using a multitude of training and fine-tuning
techniques, there was significant number of hyper-
parameters to consider for tuning. For our experiment
tracking and hyper-parameter tuning we used Weights
& Biases. The platform’s sweep agents proved to be
very useful in this task. As shown In figure 4, a model
(AST in the figure) can be trained given a range of se-
lected hyper parameters and plotted to show the per-
formance for each configuration.
In this paper we tested a multitude of hyper pa-
rameters, such as: number of augmentations, type
of augmentation, learning rate, type of adapters, etc.
All of the results are tracked using Weights & Biases
and are publicly available projects as listed in (Berg,
2024b).
We used a 60-20-10-10 (train, test, train-val, test-
val) split to evaluate the models in hyper-parameter
tuning, and a 80-20 (train, test) split for 5-fold vali-
dation. We split the data, for hyper-parameter tuning,
in this way to see the differences in augmentation vs.
no augmentation data splits, so the train and the train-
validation splits had augmentations applied, and the
test and test-validation did not.
Figure 4: Example Weights & Biases Hyper Parameter Tun-
ing.
4.2 Model Evaluation
To evaluate the models we focused on the test accu-
racy and F1 score. Where F1 score is the harmonic
mean of the evaluated precision and recall. These are
standard classification metrics that allow for robust
comparison of the training runs. Naturally, we also
tracked the model’s configuration, losses, precision,
and recall; which can all be found on our Weights &
Biases projects page (Berg, 2024b).
4.3 Results
4.4 AST PEFT
To find the best possible PEFT technique for AST we
trained the approaches given a range of configurations
for each. We found that by far, the ia3 PEFT method
had the most consistent validation accuracy, with dis-
crete Fourier tuning and AdaLoRA close behind it.
Please note that none of these sweeps included data
augmentations, as to decrease the run time. The high-
est tested accuracies are listed in table 2.
Table 2: AST PEFT Best results.
PEFT Method Accuracy(%) F1(%) Time
⋆
Full 39.67 32.86 02:40
Classifier 97.82 97.77 01:21
Ia3 97.83 97.79 01:32
Fourier 94.02 93.90 02:44
LoRA 53.26 48.68 03:39
AdaLoRA 97.28 97.23 03:10
Oft 95.10 95.14 06:30
4.5 Augmentation Experiments
The purpose of this sweep of configurations was to
find the optimal hyper-parameters for a given aug-
mentation type. As shown in Table 3 the three
best augmentations tested are sin-distortion, tanh-
distortion, and time stretch.
Table 3: AST Augmentations Best results.
Augmentation Accuracy(%) F1(%)
control (no augs) 97.82 97.78
sin-distortion 98.91 98.90
tanh-distortion 98.91 98.90
pitch shift 97.28 97.22
time stretch 98.91 98.87
add noise 98.37 98.33
polarity inversion 97.82 97.76
4.6 Number of Augmentations
The aim of this experiment was to find the optimal
number of augmentations per sample and the top 3
combination of augmentations as explained in Table
3, so either 2 or 3 augmentations would be selected
‡
Time is measured in (mm:ss).
4,500 Seconds: Small Data Training Approaches for Deep UAV Audio Classification
69

for a run out of the selection pool of time stretch, sin
distortion, and tanh distortion.
The highest run recorded used sin distortion and
time stretch augmentations, using the optimal respec-
tive augmentation configurations as determined in
section 4.5, with 4 augmentations per sample. Train-
ing this run took 4 minutes and 19 seconds (not in-
cluding the time taken to load & augment the data)
with a test accuracy of 99.45% and a test F1 score of
99.44%.
4.7 CNN Tuning
The purpose of these runs were to find the best learn-
ing rate and batch size for the custom pre-training of
the CNN model outlined in section 3.9.
We tested batch size and learning rate without any
augmentations.
The highest performing run took 34 seconds using
a batch size of 8 (with 2 accumulation steps) and a
learning rate of 0.001. This achieved a test accuracy
and test F1 score of 98.88%.
When this configuration was later tested with
varying number of augmentations per sample, it
achieved exactly the same test F1 and accuracy with
slightly higher runtime.
4.8 5-Fold Validation
After tuning the models, we compared their average
validation accuracies and F1 scores using a standard
5-fold validation approach. As shown in table 4. On
average the CNN model generally outperformed the
AST model while having a significantly lower com-
pute time.
Table 4: 5-fold Validation Results (CNN & AST).
Metrics CNN AST
Best Accuracy, No Augs (%) 95.43 96.31
Best Accuracy, w/ Augs (%) 97.53 95.71
Best F1, No Augs (%) 95.48 96.21
Best F1, w/ Augs (%) 97.53 95.54
Worst Time (mm:ss) 06:52 52:45
Best Time (mm:ss) 01:30 06:19
Mean Time (mm:ss) 04:06 26:50
5 CONCLUSION
In this paper we have shown a process to fine-
tuning and training models for extremely small audio
datasets using CNN and transformer architectures.
Through careful testing the CNN approach is
comparatively better than AST for UAV audio clas-
sification, given an extremely small 9-class dataset.
However, given this fact, it is not fully understood at
what amount of data or classes a transformer may be
more effective than a standard CNN approach.
In future studies we would like to increase the
amount of classes and audio data. Also, it would
be interesting to use pre-trained CNN models like
ResNet or MobileNet. Similarly, using other pre-
trained transformer models would be good to gauge
the effectiveness of augmentations and adapters, with
a small chance of further increasing performance.
For practical applications of this research, a multi-
modal embedded model would be a particularly use-
ful for defensive compatibilities; with this, the model
would have to be pruned and quantized for further ef-
ficiency.
ACKNOWLEDGMENTS
This research is supported by the South Carolina Re-
search Authority (SCRA), SCRA-Academic Collabo-
ration Team Grant.
REFERENCES
Balne, C. C. S., Bhaduri, S., Roy, T., Jain, V., and Chadha,
A. (2024). Parameter efficient fine tuning: A compre-
hensive analysis across applications.
Berg, A. P. (2024a). Augmentations colab notebook. Ac-
cessed: 2024-01-09.
Berg, A. P. (2024b). Weights & biases projects. Accessed:
2024-01-09.
Dafrallah, S. and Akhloufi, M. (2024). Malicious uav de-
tection using various modalities. Drone Systems and
Applications, 12:1–18.
Docker (2024). Docker documentation. Accessed: 2024-
01-09.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., Uszkoreit, J., and Houlsby,
N. (2021). An image is worth 16x16 words: Trans-
formers for image recognition at scale.
Ferreira-Paiva, L., Alfaro-Espinoza, E., Almeida, V. M., Fe-
lix, L. B., and Neves, R. V. A. (2022). A survey of data
augmentation for audio classification. CBA2022, 3(1).
Gao, Z., Wang, Q., Chen, A., Liu, Z., Wu, B., Chen, L.,
and Li, J. (2024). Parameter-efficient fine-tuning with
discrete fourier transform.
Gemmeke, J. F., Ellis, D. P. W., Freedman, D., Jansen,
A., Lawrence, W., Moore, R. C., Plakal, M., and Rit-
ter, M. (2017). Audio set: An ontology and human-
labeled dataset for audio events. In 2017 IEEE Inter-
DATA 2025 - 14th International Conference on Data Science, Technology and Applications
70

national Conference on Acoustics, Speech and Signal
Processing (ICASSP), pages 776–780.
Gong, Y., Chung, Y.-A., and Glass, J. (2021). Ast: Audio
spectrogram transformer.
Hu, E. J., Shen, Y., Wallis, P., Allen-Zhu, Z., Li, Y., Wang,
S., Wang, L., and Chen, W. (2021). Lora: Low-rank
adaptation of large language models.
HuggingFace (2024a). Peft documentation. Accessed:
2024-01-09.
HuggingFace (2024b). Transformers documentation. Ac-
cessed: 2024-01-09.
Jordal, I. (2024). Audiomentations documentation. Ac-
cessed: 2024-01-09.
K
¨
ummritz, S. (2024). The sound of surveillance: Enhanc-
ing machine learning-driven drone detection with ad-
vanced acoustic augmentation. Drones, 8(3).
Librosa (2024). Librosa documentation. Accessed: 2024-
01-09.
LightningAI (2024). Torchmetrics documentation. Ac-
cessed: 2024-01-09.
Liu, H., Tam, D., Muqeeth, M., Mohta, J., Huang,
T., Bansal, M., and Raffel, C. (2022). Few-shot
parameter-efficient fine-tuning is better and cheaper
than in-context learning.
Matplotlib (2024). Matplotlib documentation. Accessed:
2024-01-09.
MIT (2024). Ast finetuned audioset model. Accessed:
2024-01-09.
NumPy (2024). Numpy documentation. Accessed: 2024-
01-09.
Pangarkar, T. (2024). Drone analytics statistics 2024 — best
aerial technology. Accessed: 2025-01-01.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., Desmaison, A., K
¨
opf, A., Yang, E., De-
Vito, Z., Raison, M., Tejani, A., Chilamkurthy, S.,
Steiner, B., Fang, L., Bai, J., and Chintala, S. (2019).
Pytorch: An imperative style, high-performance deep
learning library.
Piczak, K. J. (2015). Esc: Dataset for environmental sound
classification. In Proceedings of the 23rd ACM Inter-
national Conference on Multimedia, MM ’15, page
1015–1018, New York, NY, USA. Association for
Computing Machinery.
PyTorch (2024a). Pytorch documentation. Accessed: 2024-
01-09.
PyTorch (2024b). Torchaudio documentation. Accessed:
2024-01-09.
Qiu, Z., Liu, W., Feng, H., Xue, Y., Feng, Y., Liu, Z., Zhang,
D., Weller, A., and Sch
¨
olkopf, B. (2024). Controlling
text-to-image diffusion by orthogonal finetuning.
Schmitt, M. and Schuller, B. (2019). End-to-end audio
classification with small datasets – making it work.
In 2019 27th European Signal Processing Conference
(EUSIPCO), pages 1–5.
Scikitlearn (2024). Scikit-learn documentation. Accessed:
2024-01-09.
Telebot (2024). Telebot documentation. Accessed: 2024-
01-09.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, L., and Polosukhin, I.
(2023). Attention is all you need.
Wang, M. (2023). A Large-Scale UAV Audio Dataset and
Audio-Based UAV Classification Using CNN. PhD
thesis, Purdue University.
Wang, Y., Chu, Z., Ku, I., Smith, E. C., and Matson, E. T.
(2022). A large-scale uav audio dataset and audio-
based uav classification using cnn. In 2022 Sixth
IEEE International Conference on Robotic Comput-
ing (IRC), pages 186–189.
Warden, P. (2018). Speech commands: A dataset for
limited-vocabulary speech recognition.
Weights&Biases (2024). Weights & biases documentation.
Accessed: 2024-01-09.
Wolf, T., Debut, L., Sanh, V., Chaumond, J., Delangue, C.,
Moi, A., Cistac, P., Rault, T., Louf, R., Funtowicz,
M., Davison, J., Shleifer, S., von Platen, P., Ma, C.,
Jernite, Y., Plu, J., Xu, C., Le Scao, T., Gugger, S.,
Drame, M., Lhoest, Q., and Rush, A. (2020). Trans-
formers: State-of-the-art natural language processing.
In Liu, Q. and Schlangen, D., editors, Proceedings of
the 2020 Conference on Empirical Methods in Nat-
ural Language Processing: System Demonstrations,
pages 38–45, Online. Association for Computational
Linguistics.
Xu, L., Xie, H., Qin, S.-Z. J., Tao, X., and Wang, F. L.
(2023). Parameter-efficient fine-tuning methods for
pretrained language models: A critical review and as-
sessment.
Zaman, K., Sah, M., Direkoglu, C., and Unoki, M. (2023).
A survey of audio classification using deep learning.
IEEE Access, 11:106620–106649.
Zhang, Q., Chen, M., Bukharin, A., Karampatziakis, N.,
He, P., Cheng, Y., Chen, W., and Zhao, T. (2023).
Adalora: Adaptive budget allocation for parameter-
efficient fine-tuning.
4,500 Seconds: Small Data Training Approaches for Deep UAV Audio Classification
71
