
Aerial Logistics in Hard-to-Reach Environments: Systematic Review
of the Use of Class 1 UAVs in Health Supply Distribution in Military
Operations and Other Context
Rodrigo Bomfim
a
, Pablo Gustavo Cogo Pochmann
b
and Eduardo Borba
Neves
c
Officers’ Improvement School (Escola de Aperfeiçoamento de Oficiais – EsAO),
Duque de Caxias Avenue, 2071, Rio de Janeiro-RJ, Brazil
Keywords: Unmanned Aerial Vehicles (UAVs), Health Supply Logistics, Constructive Simulation, COMBATER
Software, Military Doctrine, Hard-to-Reach Environments, Systematic Literature Review, PRISMA
Methodology, Class 1 Drones, Medical Supply Distribution.
Abstract: This study examines the potential integration of Class 1 Unmanned Aerial Vehicles (UAVs) into the
COMBATER simulation software, emphasizing their role in healthcare logistics within challenging
environments such as jungles and remote areas. A systematic literature review was conducted following
PRISMA guidelines, supported by the TREND quality assessment checklist. The analysis identified critical
operational parameters for UAV performance, including flight endurance, range, maximum speed, operational
altitude, and cargo capacity. These parameters were categorized by UAV class—Mini (<15 kg) and Small
(>15 kg)—to align with military doctrine and operational needs. The findings indicate that Mini drones are
ideal for unit-level operations, transporting lightweight items like medications and medical supplies, while
small drones are suited for brigade-level missions requiring the delivery of heavier and more complex
materials, such as blood products and human organs. Limitations include the heterogeneity of studies, the lack
of detailed meteorological data, and inconsistent reporting standards. To address these challenges, the study
highlights the importance of constructive simulation in testing UAV applications and refining their integration
into military operations. By incorporating UAV-specific data into COMBATER, this research contributes to
realistic scenario modelling, supporting military decision-making and advancing logistical efficiency. The
proposed framework provides a foundation for the strategic use of UAVs in military healthcare logistics,
offering insights into the development of military doctrine and the optimization of operations in complex
environments.
1 INTRODUCTION
The use of Unmanned Aerial Vehicles (UAVs), or
drones, in simulated scenarios offers promising
potential for assessing their logistical effectiveness in
challenging environments, such as jungle or remote
areas. In this context, Almeida et al. (2023) highlight
that the COMBATER software, widely employed by
the Brazilian Army, is a robust tool for modelling
complex operations and testing courses of action in
controlled environments. This functionality
significantly enhances decision-making processes
and tactical training. Although drone delivery not yet
a
https://orcid.org/0009-0003-1437-3078
b
https://orcid.org/0000-0003-3944-7953
c
https://orcid.org/0000-0003-4507-6562
implemented, the system could be adapted in the
future to analyse how drones might optimize the
distribution of medical supplies in hard-to-reach
areas, potentially improving outcomes for casualties
and the recovery of wounded personnel.
The integration of real-world data, such as range,
payload capacity, and operational conditions, into the
COMBATER algorithm will enable the creation of
more realistic scenarios to assess the feasibility of
using drones for transporting health supplies. Given
the critical importance of health supplies in sustaining
operations and ensuring timely medical care,
assessing their delivery via UAVs is a key focus of
Bomfim, R., Pochmann, P. G. C., Neves and E. B.
Aerial Logistics in Hard-to-Reach Environments: Systematic Review of the Use of Class 1 UAVs in Health Supply Distribution in Military Operations and Other Context.
DOI: 10.5220/0013461400003970
In Proceedings of the 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2025), pages 15-26
ISBN: 978-989-758-759-7; ISSN: 2184-2841
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
15

this study. This approach would not only enhance
military training but also support strategic decision-
making, strengthening the Army's ability to address
the challenges of contemporary operations in remote
environments.
This study proposes exploring the possibility of
incorporating the delivery of medical supplies by
drones into the COMBATER algorithm, using real-
world data to parameterize the efficiency of this
logistical solution. Constructive simulation serves as
a cost-effective and controlled method to evaluate the
integration of UAVs in logistical processes,
minimizing risks and informing live simulation
strategies. Additionally, it aims to identify the most
suitable echelons to receive this technology in
constructive simulation before its deployment in live
simulation, ensuring that its adoption is grounded in
robust operational and technical evidence. This
initiative could also contribute to the evolution of
military doctrine by providing a data-driven
foundation for integrating UAVs into logistical
frameworks, enhancing operational efficiency and
readiness.
2 METHODS
2.1 Eligibility Criteria
This study employed a systematic literature review,
structured in alignment with the guidelines outlined
in the Preferred Reporting Items for Systematic
Reviews and Meta-Analyses (PRISMA) statement
(Page et al., 2021). The temporal scope included
publications on military doctrine from 1997 to the
present and scientific works published between 2014
and 2024. Four languages were considered for
inclusion: English, Portuguese, French, and Spanish.
Regarding the types of publications, the search
focused on book chapters, monographs, doctrinal
manuals, scientific articles, and technical standards.
2.2 Search Strategy
The primary objective of this review was to identify
and analyse studies focusing on the utilization of
drones, commonly referred to as RPA (Remotely
Piloted Aircraft) and UAV (Unmanned Aerial
Vehicles), for medical supply operations in jungle,
forest, or remote environments. The review explored
topics related to logistics, medical operations, and the
integration of technology in complex and challenging
settings.
In this study, the research focused on drones
classified as Class 1 (weighing up to 150 kg)
according to NATO standards (NATO, 2019). Class
1 drones are divided into three categories based on
their weight, maximum altitude, and range:
• Micro: drones weigh less than 2 kg, can reach
an altitude of up to 200 feet AGL (Above Ground
Level), and have a range of up to 5 km.
• Mini: drones weigh between 2 kg and 15 kg, can
fly up to 3,000 feet AGL, and have a range of up
to 25 km.
• Small: drones weigh between 15 kg and 150 kg,
can reach an altitude of up to 5,000 feet AGL, and
have a range of up to 50 km.
To structure the keywords used across various
databases for the research on drone applications in
medical supply logistics within forested
environments and military operations, we adopted the
PICO strategy (Population, Intervention,
Comparison, and Outcome). The PICO framework
aids in categorizing keywords into essential
components for systematic reviews, streamlining the
identification of studies that address specific aspects
of the topic (Nishikawa-Pacher, 2022).
To define and guide the search strategy in the
selected databases, this study adapted the PICO
framework to its specific research context.
• Problem (P): Focused on challenging
environments such as jungles and remote areas where
traditional logistics face accessibility issues
(keywords: "jungle," "forest," "remote area").
• Intervention (I): Examined the use of drones
(RPA/UAV) for transporting medical supplies in
hard-to-reach regions (keywords: "drone," "RPA,"
"UAV").
• Comparison (C): No direct comparison with
traditional methods; the focus is on the implicit
advantages of drones in these settings.
• Outcome (O): Aimed to improve logistics for
medical supplies (Class VIII), reducing response
times and risks (keywords: "medical," "medicine,"
"supply," "distribution," and "logistic.").
Building upon the defined PICO components, the
search string was developed according to the
established criteria, resulting in a set of Boolean terms
tailored to the capabilities of each digital database:
• Scopus, Web of Science, and PubMed: The
search string used was ((“drone” OR "rpa" OR "uav"
) AND ( "medical" OR "medicine" ) AND ( "supply"
OR "distribution" OR "logistic" ) AND ( "jungle" OR
"forest" OR "remote AND area" )), utilizing the
advanced search feature.
• Science Direct: Due to limitations in Boolean
operators within the database, the string ("drone" OR
SIMULTECH 2025 - 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
16

"uav" OR "rpa") AND ("medical" OR "medicine")
AND ("supply" OR "distribution") AND ("jungle"
OR "forest") was applied in the advanced search
option.
• Defense Technical Information Center
(DTIC) and The Army University: In these
databases, the string ("uav" AND "forest" AND
"medical" AND "drone" AND "logistic") was
employed, as the lack of an advanced search option
constrained the number of applicable keywords.
• BDEx: As a Brazilian Army database, keyword
translation and the inclusion of the term SARP
(Sistemas de Aeronaves Remotamente Pilotadas)
were necessary, reflecting its official nomenclature
(Brasil, 2020).Due to limitations in search
capabilities, the string ("drone" AND "SARP" AND
"logística") was used to locate relevant studies
aligning with the specific objectives of this research.
2.3 Study Selection
During the identification phase, a total of 755
duplicate records were excluded from the initial set of
1,597 references. The remaining references
underwent a multi-stage screening process to ensure
alignment with the research objectives.
In the first screening, titles, keywords, and
abstracts were reviewed. References that were
misaligned with the study’s goals, such as those
focusing on artificial intelligence (AI), Internet of
Things (IoT), computer vision, robotics, or blockchain
in healthcare systems, were eliminated. Incomplete
references, such as indices, news, or abstracts without
full text, and those with search keywords appearing in
titles or abstracts but unrelated to the research
objectives, were also excluded. Additionally, records
using the acronym RPA to refer to Robotic Process
Automation rather than Remotely Piloted Aircraft
were removed.
The second screening addressed accessibility and
language. Studies not found or written in languages
other than English, French, Spanish, or Portuguese
were excluded.
In the third screening, the full texts of the
remaining studies were evaluated using a multi-
criteria analysis. Articles classified with very strong
adherence included at least four central concepts
(keywords) and were fully aligned with the research
objectives. Articles with strong adherence contained
at least three central concepts and demonstrated
coherence with the study’s aims, while those with
medium adherence covered at least two central
concepts and aligned with the research focus. No
articles were classified with weak adherence, and
articles with no adherence were excluded if they
lacked focus on the study’s scope and objectives, even
if they discussed drones.
2.4 Data Collection Process
The data collection process involved conducting
searches across seven pre-defined databases using
four proposed keyword combinations. These
databases were selected because they are well-known
and provided a higher number of studies aligned with
the objectives of the systematic review. After each
search, the retrieved data were imported and stored in
the EndNote software for organization and subsequent
analysis.
2.5 Quality Assessment of Studies
The quality of the methodologies employed in the
studies included in the review was assessed based on
the guidelines of the Transparent Reporting of
Evaluations with Nonrandomized Designs (TREND),
as described by Des Jarlais et al. (2004). This tool was
chosen due to its relevance in ensuring transparency in
the evaluation of studies with nonrandomized designs,
such as quasi-experimental and observational studies,
which are often utilized in contexts where randomized
clinical trials are unfeasible or unethical (Vallvé, C,
2005). The TREND statement provides a structured
checklist to evaluate aspects such as detailed
descriptions of interventions, theoretical foundations,
treatment allocation, consideration of confounding
variables, and the overall methodological robustness
(Des Jarlais et al., 2004).
The use of the TREND guidelines is also justified
by the need to ensure that the results of the studies are
accurate and consistent, making it easier to compare
findings across studies in meta-analyses and
systematic reviews. The evaluation looked at
important aspects, such as how clearly the sample
selection was explained, how treatments were
assigned, how potential factors that could affect the
results were considered, whether the results could be
applied to other situations, and how strong the overall
study design was. By following these steps, the studies
were carefully analyzed for their reliability and
accuracy. The results of this evaluation are shown in
Table 1.
Aerial Logistics in Hard-to-Reach Environments: Systematic Review of the Use of Class 1 UAVs in Health Supply Distribution in Military
Operations and Other Context
17
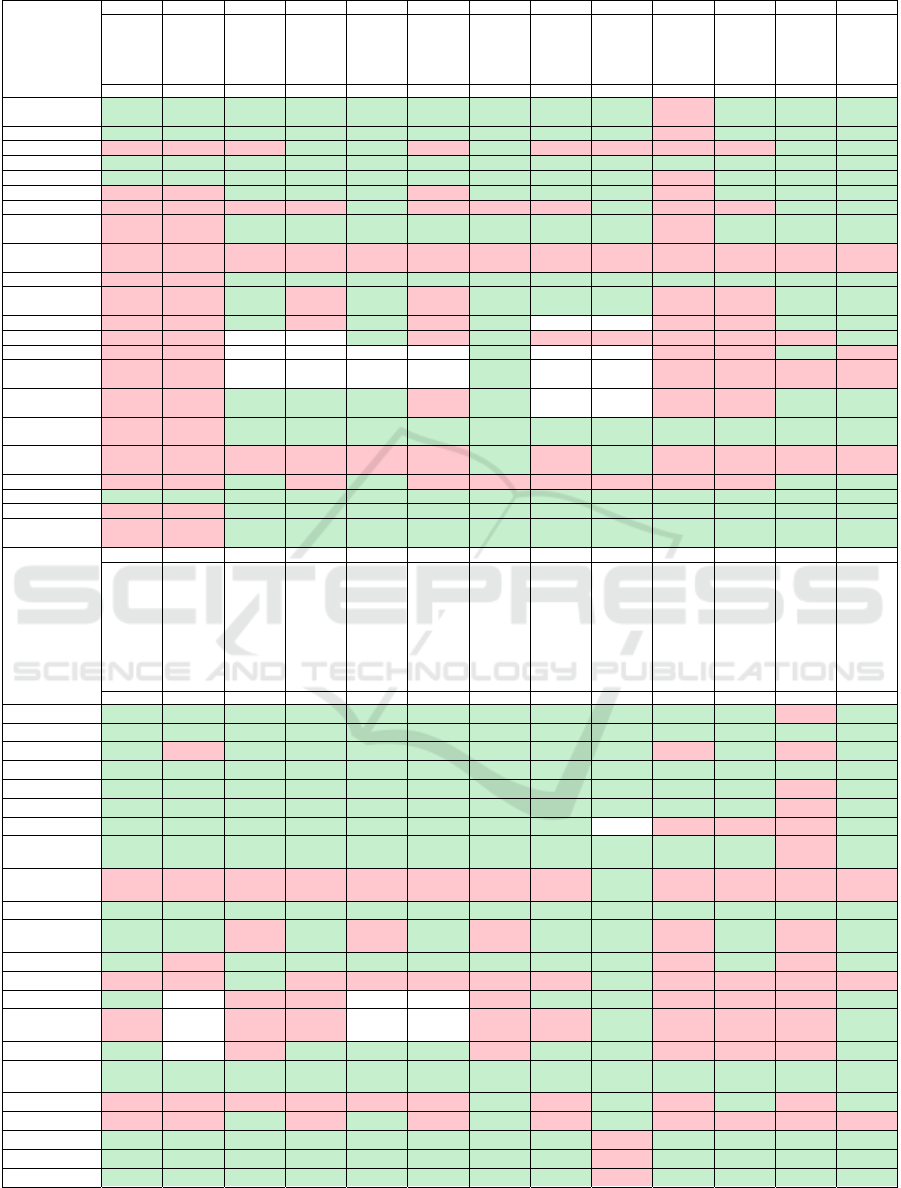
Table 1: Assessment of Study Quality Using the TREND Guideline.
Section/Topic
Study Study Study Study Study Study Study Study Study Study Study Study Study
Awad et at.,
2021
(Stanton,
2020)
Awad et at.,
2021
(Vodafone,
2019)
Awad et at.,
2021
(Hii et al.,
2019)
Awad et at.,
2021
(Ackerman
and Koziol,
2019)
Awad et at.,
2021
(Cheskes et
al., 2020)
Awad et at.,
2021
(Suas
News,
2014)
Ayamga et
at., 2021
(Sanfridsso
n et al.,
2019)
Banik et al.,
2023
(Adwibowo
, 2021)
Banik et al.,
2023
(Nur et al.,
2020)
Braun et al.,
2019
(DHL,
2018)
Braun et
al., 2019
(Howell et
al., 2015)
Euchi, 2021
(Amukele
et al.,
2017a)
Euchi, 2021
(Claesson
et al., 2017)
Reported? Reported? Reported? Reported? Reported? Reported? Reported? Reported? Reported? Reported? Reported? Reported? Reported?
Title and
Abstract
YES YES YES YES YES YES YES YES YES NO YES YES YES
Background YES YES YES YES YES YES YES YES YES NO YES YES YES
Participants NO NO NO YES YES NO YES NO NO NO NO YES YES
Interventions YES YES YES YES YES YES YES YES YES YES YES YES YES
Objectives YES YES YES YES YES YES YES YES YES NO YES YES YES
Outcomes NO NO YES YES YES NO YES YES YES NO YES YES YES
Sample Size NO NO NO NO YES NO NO NO YES NO NO YES YES
Assignment
Method
NO NO YES YES YES YES YES YES YES NO YES YES YES
Blinding
(masking)
NO NO NO NO NO NO NO NO NO NO NO NO NO
Unit of Analysis NO NO YES YES YES YES YES YES YES YES YES YES YES
Statistical
Methods
NO NO YES NO YES NO YES YES YES NO NO YES YES
Participant flow NO NO YES NO YES NO YES NA NA NO NO YES YES
Recruitment NO NO NA NA YES NO YES NO NO NO NO NO YES
Baseline Data NO NO NA NA NA NA YES NA NA NO NO YES NO
Baseline
equivalence
NO NO NA NA NA NA YES NA NA NO NO NO NO
Numbers
analyzed
NO NO YES YES YES NO YES NA NA NO NO YES YES
Outcomes and
estimation
NO NO YES YES YES YES YES YES YES YES YES YES YES
Ancillary
analyses
NO NO NO NO NO NO YES NO YES NO NO NO NO
Adverse events NO NO YES NO YES NO NO NO NO NO NO YES YES
Interpretation YES YES YES YES YES YES YES YES YES YES YES YES YES
Generalizability NO NO YES YES YES YES YES YES YES YES YES YES YES
Overall
Evidence
NO NO YES YES YES YES YES YES YES YES YES YES YES
Section/Topic
Study Study Study Study Study Study Study Study Study Study Study Study Study
Fakhruldd
in et al.,
2019
Fakhruldd
in et al.,
2019
(Claesson
et al.,
2016)
Flemons
et al.,
2022
Grote et
al., 2024
Mohd
Daud et
al., 2022
(Yakushij
i et al.,
2020)
Naor et
al., 2024
Poljak,
2020
(Mesar et
al., 2018)
Poljak,
2020
(Scalea et
al., 2018)
Sanz-
Martos,
2022
(Jain et
al., 2018)
Scott, J
and Scott,
C, 2018
Shao et
al., 2022
Sharma,
S. and
Sharma,
H, 2024
(The
Times of
India,
2023
)
Stierlin et
al., 2024
(Amukele
et al.,
2017b)
Reported? Reported? Reported? Reported? Reported? Reported? Reported? Reported? Reported? Reported? Reported? Reported? Reported?
Title and Abstract YES YES YES YES YES YES YES YES YES YES YES NO YES
Background
YES YES YES YES YES YES YES YES YES YES YES YES YES
Participants YES NO YES YES YES YES YES YES YES NO YES NO YES
Interventions YES YES YES YES YES YES YES YES YES YES YES YES YES
Objectives
YES YES YES YES YES YES YES YES YES YES YES NO YES
Outcomes YES YES YES YES YES YES YES YES YES YES YES NO YES
Sample Size YES YES YES YES YES YES YES YES NA NO NO NO YES
Assignment
Method
YES YES YES YES YES YES YES YES YES YES YES NO YES
Blinding
(masking)
NO NO NO NO NO NO NO NO YES NO NO NO NO
Unit of Analysis YES YES YES YES YES YES YES YES YES YES YES YES YES
Statistical
Methods
YES YES NO YES NO YES NO YES YES NO YES NO YES
Participant flow YES NO YES YES YES YES YES YES YES NO YES NO YES
Recruitment NO NO YES NO NO NO NO NO YES NO NO NO NO
Baseline Data
YES NA NO NO NA NA NO YES YES NO NO NO YES
Baseline
equivalence
NO NA NO NO NA NA NO NO YES NO NO NO YES
Numbers analyzed YES NA NO YES YES YES NO YES YES NO NO NO YES
Outcomes and
estimation
YES YES YES YES YES YES YES YES YES YES YES YES YES
Ancillary analyses NO NO NO NO NO NO YES NO YES NO YES NO YES
Adverse events NO NO YES NO YES NO YES NO YES NO NO NO NO
Interpretation
YES YES YES YES YES YES YES YES NO YES YES YES YES
Generalizability YES YES YES YES YES YES YES YES NO YES YES YES YES
Overall Evidence YES YES YES YES YES YES YES YES NO YES YES YES YES
SIMULTECH 2025 - 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
18
3 RESULTS
3.1 Study Selection and Characteristics
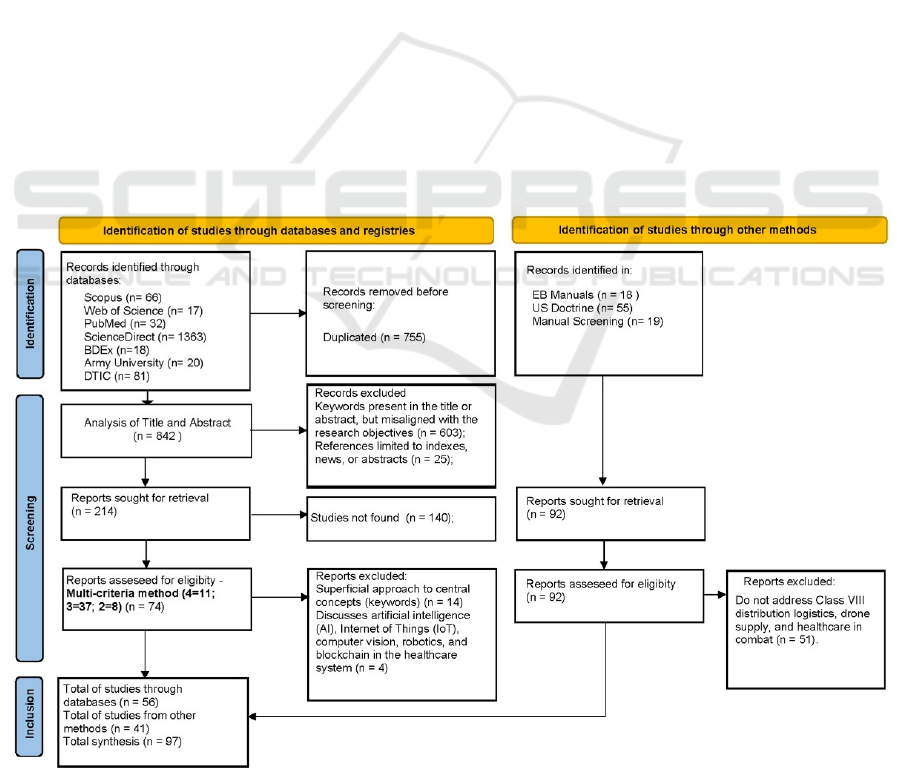
The Fig. 1 presents the PRISMA flow diagram used to
illustrate the systematic selection process for this
review on medical supply operations using Class 1
UAVs in healthcare and military contexts. The process
includes four phases: Identification, Screening,
Eligibility, and Inclusion. Studies were identified
through databases and manual searches, followed by
removing duplicates and excluding those misaligned
with research objectives or limited to indexes. In the
eligibility phase, studies were rigorously assessed,
excluding those with superficial approaches or
irrelevant technologies. Ultimately, 97 studies were
included, ensuring a comprehensive synthesis aligned
with the review's objectives.
Following the systematic review using the
PRISMA method, a detailed analysis was conducted
on studies specifically addressing the characteristics
of drones used in medical supply operations in jungle,
forest, or remote environments. This process resulted
in the identification of 26 studies, 6 of which directly
mentioned the characteristics of the drones.
Additionally, the snowballing method was applied to
explore references and citations of the included
studies, leading to the identification of 20 additional
articles categorized as the "Corpus Static." This
corpus represents a fixed dataset derived from
reference analysis, comprising studies that specifically
addressed Class 1 UAV characteristics within their
scope of research (Wohlin, 2014).
3.2 Risk of Bias in Studies
Table 1 presents the risk of bias analysis for the 26
studies evaluated using the TREND method. The 5
studies marked in red exhibited low methodological
quality and a high risk of bias.
Some items from the TREND checklist are marked
as "not applicable (NA)" in certain studies because
these criteria may not align with the design or scope
of the evaluated research. For instance, most studies
do not directly involve human participants but focus
on logistical interventions or operational analyses,
which eliminates the need for descriptions of
demographic characteristics or blinding strategies.
Similarly, studies that examine technologies or
technical processes without traditional comparative
variables may not require advanced statistical methods
or causality analyses, thus justifying their exclusion in
specific evaluations.
Figure 1: PRISMA flow diagram illustrating the selection process.
Aerial Logistics in Hard-to-Reach Environments: Systematic Review of the Use of Class 1 UAVs in Health Supply Distribution in Military
Operations and Other Context
19
3.3 Results of Individual Studies
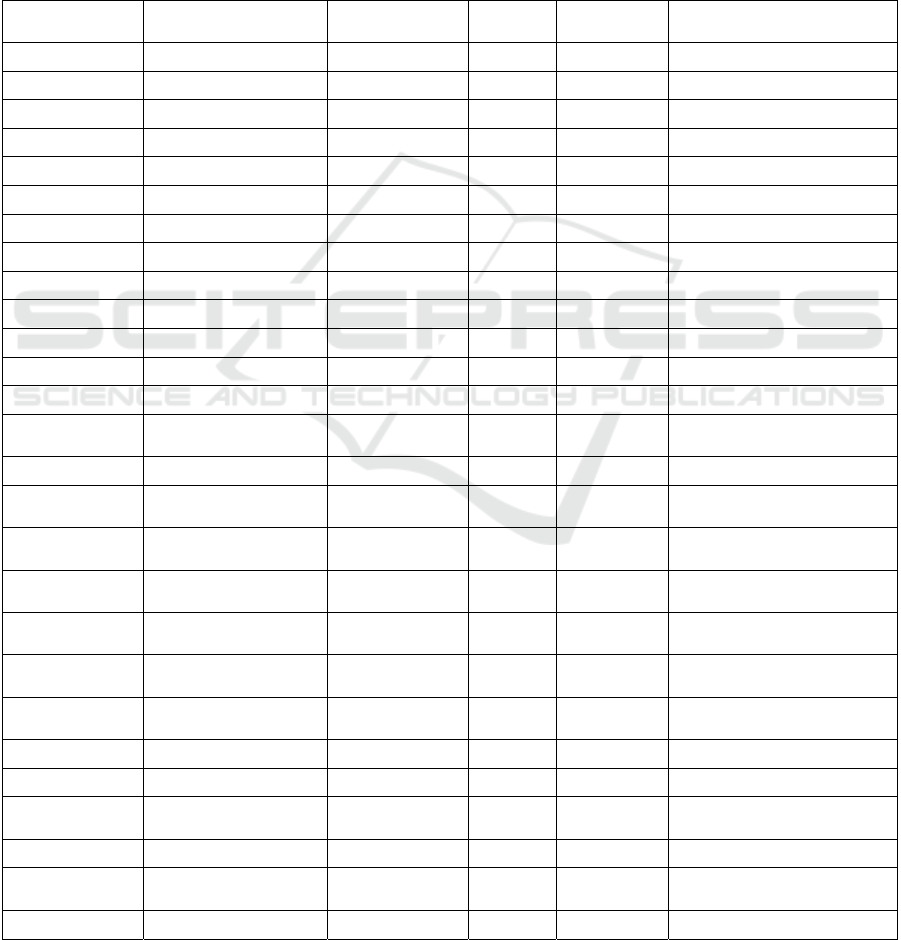
The Table 2 provides an overview of studies
analysing the application of drones in health logistics,
highlighting their capabilities and operational
contexts. It categorizes drones based on their
developers, models, configurations, and classification
according to NATO UAS guidelines (NATO, 2019),
detailing the operational environments (urban, rural,
remote, or controlled) and delivery methods, such as
ground landing, winch systems, or parachutes.
Additionally, it specifies the types of medical
materials transported, ranging from insulin and
vaccines to emergency medical equipment and
refrigerated medical cargo.
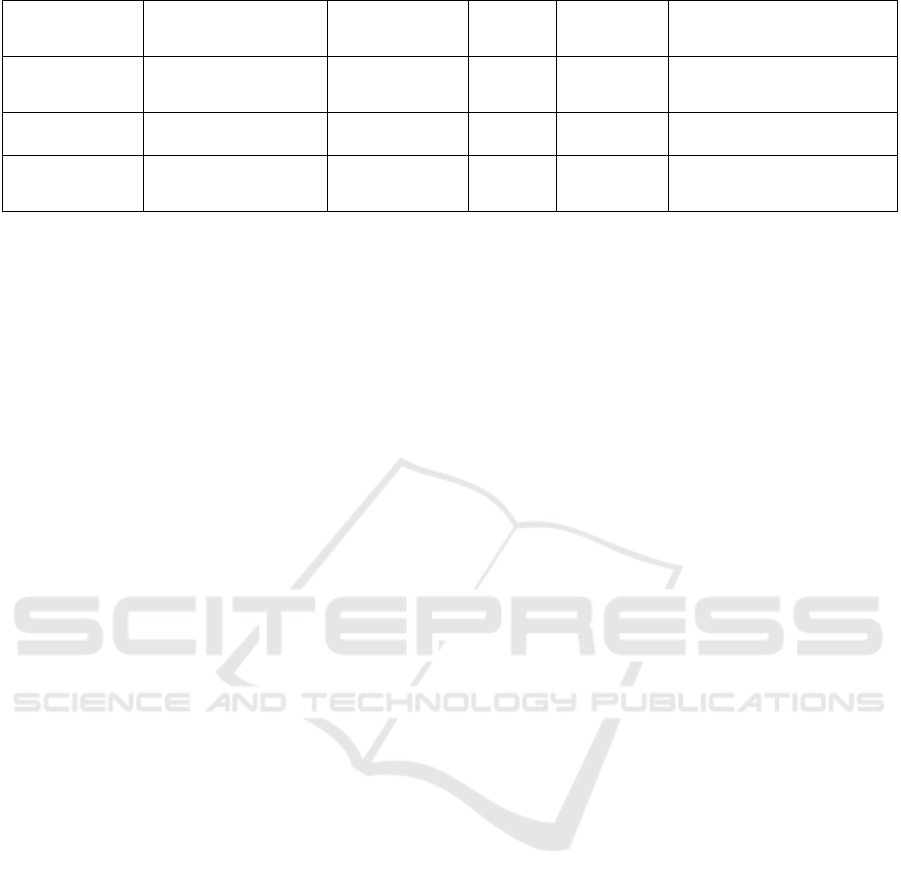
The technical performance indicators and load
capacities of drones used in health logistics are
presented in Table 3, which complements the analysis
provided in Table 2. It details information such as
flight endurance, operational range (per single battery
charge), maximum speed, altitude capabilities, and
load capacity for each model.
Table 2: General Characteristics of Studies on the Use of Drones in Health Logistics.
Study
(Corpus Static)
Drone Information (Developers,
Model, Configuration)
Country (Operation
Environmental)
Category
(Nato UAS
Classification)
Delivery method Type of Material Transported
Awad et at., 2021
(Hii et al., 2019)
DJI, Mavic Air, Multi-rotor-
quadcopter
United Kingdom
(Urban)
Mini (<15 kg) Ground landing Medications (Insulin)
Awad et at., 2021 (Stanton,
2020)
Volansi, VOLY C10, Multi-rotor -
quadcopter
USA
(Not provided)
Not provided Ground landing Vaccines
Awad et at., 2021
(Vodafone, 2019)
NUI Galway, Wingcopter 178
Heavy Lift, Hybrid
Irlanda
(Rural and Remote Areas)
Not provided Ground landing Medications (for diabetes)
Awad et at., 2021
(Ackerman and Koziol, 2019)
Zipline, Not provided, Fixed Wing
Rwanda (Mountainous,
Rural and Remote Areas)
Small (>15 kg) Parachute Blood products
Awad et at., 2021
(Cheskes et al., 2020)
Drone Delivery Canadian, Sparrow
X1000, Multi-rotor - octocopter
Canadian
(Rural and Remote Areas)
Not provided Ground landing
Automated External
Defibrillators (AED)
Awad et at., 2021
(Cheskes et al., 2020)
Indro Robotics, InDro M210C,
Multi-rotor - quadcopter
Canadian
(Rural and Remote Areas)
Not provided Ground landing
Automated External
Defibrillators (AED)
Awad et at., 2021
(Suas News, 2014)
TU Delft, Not provided, Multi-
rotor - octocopter
Netherlands
(Urban)
Mini (<15 kg) Ground landing
Automated External
Defibrillators (AED)
Ayamga et at., 2021
(Sanfridsson et al., 2019)
DJI, Inspire 1, Multi-rotor -
quadcopter
Sweden
(Urban and Rural)
Mini (<15 kg) Ground landing
Automated External
Defibrillators (AED)
Banik et al., 2023
(Adwibowo, 2021)
Not provided, Not provided,
Multi-rotor - quadcopter
Indonesia
(Mountainous and Rural)
Small (>15 kg) Ground landing Vaccines (COVID vaccine)
Banik et al., 2023
(Nur et al., 2020)
Not provided, "Drone B", Multi-
rotor - quadcopter
Not provided
(Urban and Rural)
Mini (<15 kg) Ground landing Not provided
Braun et al., 2019
(DHL, 2018)
DHL, Parcelcopter 4.0, Hybrid
Tanzania
(Remote Areas and Rural)
Not provided Ground landing Medications and Medical supplies.
Braun et al., 2019
(Howell et al., 2015)
Flirtey Corporation, Flirtey F2.4,
Multi-rotor - hexacopter
USA
(Urban and Rural)
Mini (<15 kg) Dropped by rope Medications and Medical supplies.
Euchi, 2021
(Amukele et al., 2017a)
DJI - Johns Hopkins Hospital,
S900, Multi-rotor - hexacopte
r
USA
(Controlled Environment)
Mini (<15 kg) Ground landing Blood products
Euchi, 2021
(Claesson et al., 2017)
Swedish Transportation Agency,
Not provided, Multi-rotor -
Octocopter
Sweden
(Urban and Rural)
Mini (<15 kg) Ground landing
Automated External
Defibrillators (AED)
Fakhrulddin et al., 2019
DJI, Phantom 3 Professional,
Multi-rotor - quadcopter
Iraq
(Urban)
Mini (<15 kg) Ground landing Medical supplies (First aid kit)
Fakhrulddin et al., 2019
(Claesson et al., 2016)
HEIGHT TECH GmbH & Co.
KG, Not provided, Multi-rotor -
Octocopter
Sweden
(Urban and Rural)
Not provided
Parachute, Cargo drop
and Ground landing
Automated External
Defibrillators (AED)
Flemons et al., 2022
DJI, Mavic Enterprise, Multi-rotor
- quadcopter
Canadian
(Rural and Remote Areas)
Mini (<15 kg)
Ground landing,
Winch system and
Cargo drop
Medical supplies (Medical devices, Personal
Protective Equipment (PPE), water bottles
and blankets)
Flemons et al., 2022
DJI, Matrice 300, Multi-rotor -
quadcopter
Canadian
(Rural and Remote Areas)
Mini (<15 kg)
Ground landing or
Winch system
Medical supplies (Medical devices, Personal
Protective Equipment (PPE), water bottles
and blankets)
Flemons et al., 2022
DJI, Matrice 600, Multi-rotor -
hexacopter
Canadian
(Rural and Remote Areas)
Mini (<15 kg)
Ground landing or
Winch system
Medical supplies (Medical devices, Personal
Protective Equipment (PPE), water bottles
and blankets)
Grote et al., 2024
Mugin UAVe Operation
Environment, Mugin-5 Pro,
Hybri
d
United Kingdom
(Urban and Rural)
Not provided
Ground landing or
Winch system
Medical samples (pathology samples)
Mohd Daud et al., 2022
(Yakushiji et al., 2020)
Mazex Co. Ltd., M1000, Multi-rotor
- quadcopter
Japan
(Urban and Remote Areas)
Small (>15 kg) Winch system
Medications, Medical supplies and
Automated External
Defibrillators (AED)
Naor et al., 2024 Gadfin, Spirit-One, Hybrid
Israel
(Urban and Remote Areas)
Small (>15 kg) Ground landing
Medications, Medical supplies, Blood
p
roducts and human organ
Naor et al., 2024 Gadfin, Spirit-HD, Hybrid
Israel
(Urban and Remote Areas)
Small (>15 kg) Ground landing
Medications, Medical supplies, Blood
p
roducts and human organ
Poljak, 2020
(Mesar et al., 2018)
Pulse Aerospace, Vapor 55, Rotary-
wing
USA
(Remote Areas)
Small (>15 kg) Ground landing
Medical supplies (tourniquets, bandages,
pain relievers) and Blood products
(tourniquets, bandages, pain relievers)
Poljak, 2020
(Scalea et al., 2018)
DJI - Universidade de Maryland,
M600, Multi-rotor - hexacopter
USA
(Urban and Rural)
Mini (<15 kg) Ground landing Human organs
Sanz-Martos, 2022 (Jain et
al., 2018)
Yuneec International, Yuneec
Tornado H920, Multi-rotor -
hexacopter
Canadian
(Controlled Environment)
Mini (<15 kg) Not provided
Medical supplies (Victim triage equipment
and sensors)
Scott, J and Scott, C, 2018
Flirtey, Not provided, Multi-rotor -
quadcopter
USA
(Remote Areas)
Mini (<15 kg) Winch system Medications
SIMULTECH 2025 - 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
20
Scott, J and Scott, C, 2018
Matternet - UNICEF and Doctors
without Borders, Not provided,
Multi-rotor - quadcopter
Haiti, Dominican Republic,
Papua New
Guinea and Switzerland
(Urban and Rural)
Mini (<15 kg) Ground landing Medications and Blood products
Shao et al., 2022
Researchers from Chang Jung
Christian University e da Chunghwa
Telecom Co, Ltd., Not provided,
Multi-rotor - hexacopter
Taiwan
(Mountainous and Rural)
Mini (<15 kg) Not provided
Medications
Sharma, S. and Sharma, H,
2024
(The Times of India, 2023)
AIIMS-Rishikesh, AQUILA X2,
Hybrid
India
(Mountainous and Remote
Areas)
Mini (<15 kg) Ground landing
Medications (Anti-tuberculosis Drugs)
Stierlin et al., 2024
(Amukele et al., 2017b)
Latitude Engineering - Johns
Hopkins University School of
Medicine e a Mayo Clinic., HQ-40,
Hybri
d
USA
(Controlled Environment)
Mini (<15 kg) Ground landing Medical samples
Among the analysed studies, only six provided
data on ambient temperature during drone flights
(Amukele et al., 2017a, 2017b; Flemons et al., 2022;
Hii et al., 2019; Sanfridsson et al., 2019; Scalea et al.,
2018; Yakushiji et al., 2020). The recorded
temperatures varied significantly, ranging from
negative values, such as -1°C in tests conducted by
Hii et al. (2019), to a maximum of 36.2°C reported by
Mohd Daud et al. (2022). Wind speed was mentioned
in five studies (Flemons et al., 2022; Hii et al., 2019;
Scalea et al., 2018; Shao et al., 2022; Yakushiji et al.,
2020), while relative humidity was documented in
only two cases (Amukele et al., 2017; Hii et al.,
2019). Atmospheric pressure data were even scarcer,
being recorded solely by Hii et al. (2019), who
reported values between 1021 and 1022 mbar during
operations.
Among the 26 studies analyzed (Table 2), 24
(92.3%) reported the use of a single delivery method
per drone, while 2 studies (7.7%) described the
employment of multiple methods. In total, 31 drones
were reported, with ground landing being the
predominant method, observed in 64.5% (20 drones).
Additional methods included the winch system,
utilized in 6.5% (2 drones), and parachute delivery,
observed in 3.2% (1 drone). Combinations of
methods were employed in 9.7% (3 drones), such as
ground landing or winch system, while more complex
approaches, like parachute delivery, ground landing,
and cargo drop, were implemented in 6.5% (2
drones). Lastly, 6.5% (2 drones) did not provide
sufficient information about the delivery method
utilized.
Regarding operational environments, urban and
rural areas were the most frequently mentioned,
representing 30.8% (8 studies). Next, rural and
remote areas were observed in 11.5% (3 studies). The
mountainous environment was identified in various
combinations, including mountainous and remote
areas, mountainous and rural areas, or mountainous,
rural, and remote areas, totaling 15.4% (4 studies).
Exclusively urban and controlled environments were
equally reported, with 11.5% (3 studies) each.
Additionally, urban and remote areas were mentioned
in 7.7% (2 studies), and exclusively remote
environments were reported in 7.7% (2 studies).
Finally, 1 study (3.8%) did not specify the operational
environment.
Among the drones analyzed, the Mini (<15 kg)
category was the most frequently reported,
representing 58.1% (18 drones). This was followed
by the Small (>15 kg) category, accounting for 19.4%
(6 drones). Additionally, 22.6% (7 drones) were
classified as Not provided, indicating a lack of
specific weight-based categorization for a significant
portion of the sample.
In terms of materials transported, the most
frequently mentioned items were Automated External
Defibrillators (AEDs) and Medications, each reported
in 5 studies (19.2%). Medical Supplies were
mentioned in 4 studies (15.4%), while Vaccines,
Blood Products, and Medical Samples appeared in 2
studies each (7.7%). Unique cases included Human
Organs in 1 study (3.8%), and combinations such as
Medications and Medical Supplies in 2 studies (7.7%)
and Medications, Medical Supplies, Blood Products,
and Human Organs in 1 study (3.8%). Lastly, 1 study
(3.8%) did not specify the transported materials.
According to Table 3, the results indicated that the
flight endurance had a mean of 33.07 minutes and a
standard deviation of 36.36 minutes. The drones'
range showed a mean of 68.16 km, with a standard
deviation of 101.19 km. The average maximum speed
was 75.88 km/h, with a standard deviation of 39.61
km/h. For operational altitude, the mean found was
871.45 m, with a standard deviation of 1174.15 m.
Finally, the cargo capacity recorded a mean of 5.01
kg and a standard deviation of 4.24 kg.
Aerial Logistics in Hard-to-Reach Environments: Systematic Review of the Use of Class 1 UAVs in Health Supply Distribution in Military
Operations and Other Context
21
Table 3: Drone Flight Performance Metrics and Cargo Capacity.
Study (Corpus Static)
Drone Information (Developers, Model,
Configuration)
Flight
Endurance
(min)
Range (for a
single battery
charge) (km)
Maximal
Speed (km/h)
Altitude (m)
Cargo
capacity
(Kg)
Awad et at., 2021
(Hii et al., 2019)
DJI, Mavic Air, Multi-rotor-quadcopter 7 to 11 0.63 and 0.99 5.4 10 0.194
Awad et at., 2021
(Stanton, 2020)
Volansi, VOLY C10, Multi-rotor - quadcopter 60 80.46 Not provided Not provided 4.53
Awad et at., 2021
(Vodafone, 2019)
NUI Galway, Wingcopter 178 Heavy Lift, Hybrid 32 43.3 Not provided Not provided
Not
p
rovide
d
Awad et at., 2021
(Ackerman and Koziol,
2019)
Zipline, Not provided, Fixed Wing 45 160 128 400 to 500 1.75
Awad et at., 2021
(Cheskes et al., 2020)
Drone Delivery Canadian, Sparrow X1000, Multi-rotor -
octocopter
25 25 80 900 4.5
Awad et at., 2021
(Cheskes et al., 2020)
Indro Robotics, InDro M210C, Multi-rotor - quadcopter 25 25 55 1000 4
Awad et at., 2021
(Suas News, 2014)
TU Delft, Not provided, Multi-rotor - octocopter Not provided 100 Not provided Not provided 4
Ayamga et at., 2021
(Sanfridsson et al.,
2019)
DJI, Inspire 1, Multi-rotor - quadcopter 15 to 20 Not provided Not provided Not provided 2
Banik et al., 2023
(Adwibowo, 2021)
Not provided, Not provided, Multi-rotor - quadcopter 16 to 50 Not provided 54 to 80 Not provided 3 to 20
Banik et al., 2023
(Nur et al., 2020)
Not provided, "Drone B", Multi-rotor - quadcopter 15 12 Not provided Not provided 2
Braun et al., 2019
(DHL, 2018)
DHL, Parcelcopter 4.0, Hybrid 40 60 140 Not provided 4
Braun et al., 2019
(Howell et al., 2015)
Flirtey Corporation, Flirtey F2.4, Multi-rotor -
hexacopter
10 to 15 1.3 Not provided 152 2.3
Euchi, 2021
(Amukele et al., 2017a)
DJI - Johns Hopkins Hospital, S900, Multi-rotor -
hexacopter
26.5 Not provided 36 to 54 100 1,9
Euchi, 2021
(Claesson et al., 2017)
Swedish Transportation Agency, Not provided, Multi-
rotor - Octocopter
Not provided Not provided 75 Not provided
Not
p
rovide
d
Fakhrulddin et al., 2019 DJI, Phantom 3 Professional, Multi-rotor - quadcopter 3.75 Not provided Not provided Not provided
Not
p
rovide
d
Fakhrulddin et al., 2019
(Claesson et al., 2016)
HEIGHT TECH GmbH & Co. KG, Not provided, Multi-
rotor - Octocopter
8.5 10 70 Not provided
Not
p
rovide
d
Flemons et al., 2022 DJI, Mavic Enterprise, Multi-rotor - quadcopter < 30 8 Not provide
d
15 and 40 m < 1
Flemons et al., 2022 DJI, Matrice 300, Multi-rotor - quadcopter 30 to 45 15 Not provide
d
15 and 40 m 1 to 8
Flemons et al., 2022 DJI, Matrice 600, Multi-rotor - hexacopter 30 to 45 8 Not provide
d
15 and 40 m 1 to 8
Grote et al., 2024
Mugin UAVe Operation Environment, Mugin-5 Pro,
Hybri
d
Not provided 75 65 Not provided 5
Mohd Daud et al., 2022
(Yakushiji et al., 2020)
Mazex Co. Ltd., M1000, Multi-rotor - quadcopter Not provided Not provided 58 35 to 1100 17
Naor et al., 2024 Gadfin, Spirit-One, Hybri
d
Not provide
d
250 100 Not provide
d
5
Naor et al., 2024 Gadfin, Spirit-HD, Hybri
d
Not provide
d
400 100 Not provide
d
15
Poljak, 2020
(Mesar et al., 2018)
Pulse Aerospace, Vapor 55, Rotary-wing 20.77 12.27 34.03 Not provided 4.5
Poljak, 2020
(Scalea et al., 2018)
DJI - Universidade de Maryland, M600, Multi-rotor -
hexacopter
Not provided 4 to 5 67.6 30.5 a 61 9.1
Sanz-Martos, 2022 (Jain
et al., 2018)
Yuneec International, Yuneec Tornado H920, Multi-
rotor - hexacopter
24 0.7 Not provided 4000
Not
p
rovide
d
Scott, J and Scott, C,
2018
Flirtey, Not provided, Multi-rotor - quadcopter Not provided 32 Not provided Not provided 2
Scott, J and Scott, C,
2018
Matternet - UNICEF and Doctors without
Borders, Not provided, Multi-rotor - quadcopter
Not provided 10 40 Not provided 2
Shao et al., 2022
Researchers from Chang Jung Christian University e da
Chunghwa Telecom Co, Ltd., Not provided, Multi-rotor
- hexacopter
12 5.35 Not provided 1245 1
Sharma, S. and Sharma,
H, 2024
(The Times of India,
2023)
AIIMS-Rishikesh, AQUILA X2, Hybrid 30 40 Not provided Not provided 2
Stierlin et al., 2024
(Amukele et al., 2017b)
Latitude Engineering - Johns Hopkins University School
of Medicine e a Mayo Clinic., HQ-40, Hybrid
180 258 160 290 4
4 DISCUSSIONS
4.1 Evaluating UAVs in Healthcare:
Insights from a Systematic Review
The findings of this systematic review highlight the
operational versatility of Class 1 UAVs in healthcare
logistics, particularly in challenging environments
such as jungles, forests, and remote areas. Based on
the analysis of 26 studies, key metrics such as
endurance, range, speed, and cargo capacity were
identified as critical for selecting suitable drone
models for medical supply missions. The inclusion of
the snowballing method allowed the incorporation of
additional relevant studies (Corpus Static), enriching
the dataset with unique insights and reinforcing the
robustness of the methodology when combined with
PRISMA.
SIMULTECH 2025 - 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
22

However, as noted in section 3.2 (Risk of Bias),
five of the 26 studies showed low methodological
quality and high risk of bias (DHL, 2018; Stanton,
2020; Suas News, 2014; The Times of India, 2023;
Vodafone, 2019). These sources failed to meet
several TREND criteria—such as clarity on sample
size, statistical methods, outcome reporting, and
participant flow—mainly because they are not peer-
reviewed papers, but descriptive reports from
websites. Although useful for contextual information,
they lack scientific rigor and are limited in supporting
data-driven decisions.
Overall, the RSL confirms the feasibility of
integrating drone-based medical supply delivery into
the COMBATER simulation algorithm. The
performance data compiled in Tables 2 and 3 provide
real-world parameters that can be used to model
realistic logistic scenarios within the simulator.
4.2 Identified Methodological
Limitations
This study highlighted several methodological
limitations that may influence the interpretation of the
findings and their applicability to the COMBATER
simulation software. One of the primary challenges
was the heterogeneity of the analysed studies, as the
experiments were conducted in diverse geographic
locations and with different types of drones and
equipment. This variability complicates the
generalization of results, as the performance of
drones may be context-specific, influenced by unique
environmental and operational factors.
Another significant limitation was the lack of
reported meteorological conditions in the studies.
Weather factors, such as wind speed, temperature,
humidity, and precipitation, are known to
significantly affect drone performance, particularly in
terms of range, endurance, and operational altitude.
Without this critical information, it becomes difficult
to comprehensively evaluate how drones operate
under various environmental conditions. This gap
limits the ability to model drone performance
realistically, especially in scenarios where adverse
weather conditions are a likely operational constraint.
Finally, the diversity in reporting standards
among the studies analysed also presented challenges.
The absence of consistent metrics, such as
standardized measures for flight endurance or
payload performance, hindered direct comparisons
and increased the reliance on averages that may not
fully capture the nuances of specific drone categories.
Addressing these methodological gaps in future
research will be essential to refine the parameters for
integration into COMBATER and ensure that
simulations are grounded in robust and
comprehensive data.
4.3 Delivery Methods and Drone
Categories in Healthcare Logistics
The analysis of delivery methods and operational
environments highlights an intrinsic relationship
between terrain conditions and the choice of
technology employed. The predominance of ground
landing (64.5%) in urban and rural areas reflects its
practicality and reliability in scenarios where terrain
access is relatively straightforward. Conversely, more
specific methods, such as winch (6.5%) and parachute
(3.2%), are used in situations that require adapted
solutions for inaccessible terrains or those that
minimize ground interaction, such as in remote or
mountainous regions.
Technical flexibility is demonstrated by combined
methods, such as ground landing and winch (9.7%),
which show potential for serving areas with mixed
characteristics, enhancing operational efficiency in
hard-to-reach locations. However, the lack of
information on delivery methods for 6.5% of the
drones, points to methodological gaps that could
compromise the practical applicability of the results.
These findings underscore the need to align the
choice of delivery method with the specificities of the
operational environment, maximizing logistical
efficiency and the effectiveness of operations in
challenging contexts.
The relationship between the drone category and
the type of material transported shows that Mini
drones (<15 kg), representing 58.1% of the analysed
drones (18 drones), are better suited for lightweight
and low-volume items, such as medications (19.2%)
and medical supplies (15.4%). This preference is
associated with their agility, lower operational costs,
and simplicity of operation, making them ideal for
short distances. On the other hand, small drones (>15
kg), which account for 19.4% of the sample (6
drones), are more appropriate for more complex
materials, such as blood products (7.7%), vaccines
(7.7%), and human organs (3.8%). These items
require greater payload capacity and transport
precision and are often linked to operations in remote
or mountainous areas. Additionally, combinations of
materials, such as medications, medical supplies,
blood products, and organs (7.7%), highlight the need
for more robust drones in the small category to meet
diverse logistical requirements.
Aerial Logistics in Hard-to-Reach Environments: Systematic Review of the Use of Class 1 UAVs in Health Supply Distribution in Military
Operations and Other Context
23

4.4 Recommendations for Future
Applications in COMBATER
As part of the proposed integration of drone data into
the COMBATER simulation software, and in
alignment with the Doctrinal and Operational
Constraints of the Brazilian Army (Brasil, 2024), it is
recommended that Mini drones (<15 kg) be employed
at the unit level, with operational responsibility
assigned to the Command and Support Company. In
contrast, small drones (>15 kg) should be allocated at
the brigade level, with the Logistics Battalion
responsible for their operation.
The analysis of Tables 2 and 3 enabled the
identification of specific parameters to be
incorporated into the COMBATER simulation
software to ensure accurate modeling. For Mini
drones (<15 kg), the predominant configuration is the
multi-rotor (quadcopter) type, used by 44% (8 out of
18) of the drones analyzed. Brazilian military
doctrine establishes a maximum range of 15 km line
of sight (LOS) and an operational altitude of up to 140
meters (Brasil, 2024). Additional parameters include
a flight endurance of 26.02 minutes, a maximum
speed of 73.93 km/h, and an average cargo capacity
of 3.63 kg. Recommended materials for transport in
this category include medications and medical
supplies, due to their lightweight and essential role in
unit-level logistical support.
For Small drones (>15 kg), a hybrid configuration
is recommended due to its superior flight endurance,
as evidenced in studies such as Amukele et al.
(2017b). Suggested parameters for this category,
consistent with military doctrine, include a range of
up to 50 km LOS and an operational altitude of up to
900 meters (Brasil, 2024). The data analyzed indicate
an average flight endurance of 61.5 minutes, a
maximum speed of 100 km/h, and an average cargo
capacity of 5 kg, based on the mean values across all
reviewed studies. In this category, recommended
cargo includes blood products, vaccines, and human
organs, which are heavier and more complex,
requiring more robust drones with higher operational
capacity.
The incorporation of UAVs into the COMBATER
simulator involves more than the mere inclusion of
technical parameters such as speed, range, or payload.
COMBATER operates as a constructive simulator,
based on doctrinal logic and AI-generated behaviors
rather than real-time physical replication. As
described by Almeida et al. (2023), simulated units in
COMBATER act autonomously according to
predefined behavior trees and doctrinal rules.
Therefore, representing UAV capabilities, such as
reconnaissance, aerial delivery, or coordination with
other elements, requires the development of specific
models within the simulator’s internal logic. Without
this modeling, the presence of UAVs would be
merely symbolic, with no meaningful impact on
simulation outcomes. In this context, the parameters
identified in the present study constitute a necessary
preliminary step toward adapting COMBATER’s
internal structure to enable more realistic
representations of UAV employment in future
simulation environments.
5 CONCLUSIONS
This study identified and analysed key operational
and doctrinal parameters related to the use of Class 1
Unmanned Aerial Vehicles (UAVs) in military
logistics, with a focus on environments such as jungle
operations. The systematic literature review,
conducted according to PRISMA guidelines, and
application of the TREND checklist enabled the
selection of relevant studies and extraction of
standardized technical data. These parameters form
the basis for modelling UAVs in simulation
environments.
Among the findings, mini drones (<15 kg) were
found suitable for unit-level operations, while small
drones (>15 kg) showed potential for brigade-level
missions. Suggested applications included the
transport of critical materials such as medications,
vaccines, and blood products. By identifying these
parameters, the study contributes to future
adjustments in the COMBATER simulation platform.
Rather than modifying the simulator directly, the
objective was to provide inputs that support doctrinal
modeling and realistic representation of UAV
capabilities. The integration of such data is expected
to enhance the system’s ability to simulate logistical
operations and decision-making more accurately.
However, the study faced limitations, such as the
heterogeneity of the analyzed studies, the absence of
detailed meteorological data, and inconsistent
reporting standards. These gaps hinder a
comprehensive understanding of UAV performance
under diverse conditions and highlight the need for
further research. In this context, constructive
simulation, as implemented in COMBATER, offers a
valuable tool to explore scenarios that are difficult to
replicate in real-world experiments.
SIMULTECH 2025 - 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
24

REFERENCES
Ackerman, E., & Koziol, M. (2019, May). The blood is
here: Zipline’s medical delivery drones are changing
the game in Rwanda. IEEE Spectrum. Retrieved from
https://spectrum.ieee.org/ziplinedrones0519.
Adwibowo, A. (2021). Assessments of heavy lift UAV
quadcopter drone to support COVID-19 vaccine cold
chain delivery for indigenous people in remote areas in
South East Asia. medRxiv.
Almeida, A. M. de, Neves, E. B., Jansen, A. E., Pochmann,
P. G. C., & Amaral, A. D. F. (2023).
The use of constructive simulation based on
COMBATER software to enhance the learning of
Brazilian Army officers at the tactical level. 2023 15th
IEEE International Conference on Industry
Applications (INDUSCON), 1374–1379.
Amukele, T., Ness, P. M., Tobian, A. A. R., Boyd, J., &
Street, J. (2017a). Drone transportation of blood
products. Transfusion, 57(3), 582–588.
Amukele, T. K, Hernandez, J., Snozek, C. L., Wyatt, R. G.,
Douglas, M., Amini, R., & Street, J. (2017b). Drone
transport of chemistry and hematology samples over
long distances. American Journal of Clinical
Pathology, 148(5), 427-435.
Awad, A., Trenfield, S. J., Pollard, T. D., Ong, J. J.,
Elbadawi, M., McCoubrey, L. E., Goyanes, A.,
Gaisford, S., & Basit, A. W. (2021). Connected
healthcare: Improving patient care using digital health
technologies. Advanced Drug Delivery Reviews, 178,
113958.
Ayamga, M., Akaba, S., & Nyaaba, A. A. (2021).
Multifaceted applicability of drones: A review.
Technological Forecasting & Social Change, 167,
120677.
Banik, D., Hossain, N. U. I., Govindan, K., Nur, F., &
Babski-Reeves, K. (2023). A decision support model
for selecting unmanned aerial vehicles for medical
supplies: Context of COVID-19 pandemic. The
International Journal of Logistics Management, 34(2),
473–496.
Brasil. Exército Brasileiro. (2024). Portaria n° 454, de 15
de julho de 2024. Aprova as Condicionantes
Doutrinárias e Operacionais nº 02/2024 (CONDOP Nº
02/2024) Sistemas de Aeronaves Remotamente
Pilotadas (SARP). Boletim de Acesso Restrito do
Exército, (7), 84–93.
Brasil. Ministério da Defesa. Exército Brasileiro. Estado-
Maior do Exército. (2020). Manual de Campanha
EB20-MC-10.214: Vetores aéreos da Força Terrestre
(2ª ed.). Brasília, DF: Ministério da Defesa.
Braun, J., Gertz, S. D., Furer, A., Bader, T., Frenkel, H.,
Chen, J., Glassberg, E., & Nachman, D. (2019). The
promising future of drones in prehospital medical care
and its application to battlefield medicine. Journal of
Trauma and Acute Care Surgery, 87(1, Supplement 1),
S28–S34.
Cheskes, S., McLeod, S. L., Nolan, M., Snobelen, P.,
Vaillancourt, C., Brooks, S. C., Dainty, K. N., Chan, T.
C. Y., & Drennan, I. R. (2020). Improving access to
automated external defibrillators in rural and remote
settings: A drone delivery feasibility study. Journal of
the American Heart Association, 9(e016687).
Claesson, A., Bäckman, A., Ringh, M., Svensson, L.,
Nordberg, P., Djärv, T., & Hollenberg, J. (2017). Time
to delivery of an automated external defibrillator using
a drone for simulated out-of-hospital cardiac arrests vs
emergency medical services.
JAMA, 317(22), 2332–
2334.
Claesson, A., Fredman, D., Svensson, L., Ringh, M.,
Hollenberg, J., Nordberg, P., Rosenqvist, M., Djärv, T.,
Österberg, S., Lennartsson, J., & Ban, Y. (2016).
Unmanned aerial vehicles (drones) in out-of-hospital
cardiac arrest. Scandinavian Journal of Trauma,
Resuscitation and Emergency Medicine, 24(124).
Des Jarlais, D. C., Lyles, C., Crepaz, N., & the Trend
Group. (2004). Improving the reporting quality of
nonrandomized evaluations of behavioral and public
health interventions: The TREND statement. American
Journal of Public Health, 94(3), 361–366.
DHL Group. (2018). Rapid response from the air:
Medicines successfully delivered using a parcel drone
in East Africa. DHL Group. Retrieved from
https://group.dhl.com/en/media-relations/press-
releases/2018/rapid-response-from-the-air-medicines-
successfully-delivered-using-a-parcel-drone.
Euchi, J. (2021). Do drones have a realistic place in a
pandemic fight for delivering medical supplies in
healthcare systems problems? Chinese Journal of
Aeronautics, 34(2), 182–190.
Fakhrulddin, S. S., Gharghan, S. K., Al-Naji, A., & Chahl,
J. (2019). An advanced first aid system based on
unmanned aerial vehicles and a wireless body area
sensor network for elderly persons in outdoor
environments. Sensors, 19(13), 2955.
Flemons, K., Baylis, B., Khan, A. Z., Kirkpatrick, A. W.,
Whitehead, K., Moeini, S., Schreiber, A., Lapointe, S.,
Ashoori, S., Arif, M., Berenger, B., Conly, J., &
Hawkins, W. (2022). The use of drones for the delivery
of diagnostic test kits and medical supplies to remote
First Nations communities during COVID-19.
American Journal of Infection Control, 50(6), 849–856.
Grote, M., Oakey, A., Pilko, A., Krol, J., Blakesley, A.,
Cherrett, T., Scanlan, J., Anvari, B., & Martinez-
Sykora, A. (2024). The effects of costs on drone uptake
in multi-modal logistics systems within a healthcare
setting. Transport Economics and Management, 2, 58–
75.
Hii, M. S. Y., Courtney, P., & Royall, P. G. (2019). An
evaluation of the delivery of medicines using drones.
Drones, 3(52), 1–20.
Howell, C. T., Jones, F., Thorson, T., Grube, R., Mellanson,
C., Joyce, L., Coggin, J., & Kennedy, J. (2015). The
first government sanctioned delivery of medical
supplies by remotely controlled unmanned aerial
system (UAS). NASA Langley Research Center.
Jain, T., Sibley, A., Stryhn, H., & Hubloue, I. (2018).
Comparison of unmanned aerial vehicle technology-
assisted triage versus standard practice in triaging
casualties by paramedic students in a mass-casualty
Aerial Logistics in Hard-to-Reach Environments: Systematic Review of the Use of Class 1 UAVs in Health Supply Distribution in Military
Operations and Other Context
25

incident scenario. Prehospital and Disaster Medicine,
33(3), 234–239.
Mesar, T., Lessig, A., & King, D. R. (2018). Use of drone
technology for delivery of medical supplies during
prolonged field care. Journal of Special Operations
Medicine, 18(4), 34–39.
Mohd Daud, S. M. S., Mohd Yusof, M. Y. P., Heo, C. C.,
Khoo, L. S., Chainchel Singh, M. K., Mahmood, M. S.,
& Nawawi, H. (2022). Applications of drone in disaster
management: A scoping review. Science & Justice,
62(1), 30–42.
Naor, M., Pinto, G. D., Davidov, P., Cohen, Y., Izchaki, L.,
Hadieh, M., & Ghaith, M. (2024). Vertical takeoff and
landing for distribution of parcels to hospitals: A case
study about Industry 5.0 application in Israel’s
healthcare arena. Sustainability, 16(4682).
NATO (2019). ATP-3.3.8.1: Minimum training
requirements for unmanned aircraft systems (UAS)
operators and pilots (Edition B, Version 1). NATO
Standardization Office (NSO).
Nishikawa-Pacher, A. (2022). Research questions with
PICO: A universal mnemonic. Publications, 10(21), 1–
10.
Nur, F., Alrahahleh, A., Burch, R., Babski-Reeves, K., &
Marufuzzaman, M. (2020). Last mile delivery drone
selection and evaluation using the interval-valued
inferential fuzzy TOPSIS. Journal of Computational
Design and Engineering, 7(4), 397–411.
Page, M. J., McKenzie, J. E., Bossuyt, P. M., Boutron, I.,
Hoffmann, T. C., Mulrow, C. D., Shamseer, L.,
Tetzlaff, J. M., Akl, E. A., Brennan, S. E., Chou, R.,
Glanville, J., Grimshaw, J. M., Hróbjartsson, A., Lalu,
M. M., Li, T., Loder, E. W., Mayo-Wilson, E., ...
Moher, D. (2021). The PRISMA 2020 statement: An
updated guideline for reporting systematic reviews.
BMJ, 372, n71.
Poljak, M., & Šterbenc, A. (2020). Use of drones in clinical
microbiology and infectious diseases: Current status,
challenges, and barriers. Clinical Microbiology and
Infection, 26(5), 425–430.
Sanfridsson, J., Sparrevik, J., Hollenberg, J., Nordberg, P.,
Djärv, T., Ringh, M., Svensson, L., Forsberg, S., Nord,
A., Andersson-Hagiwara, M., & Claesson, A. (2019).
Drone delivery of an automated external defibrillator:
A mixed method simulation study of bystander
experience. Scandinavian Journal of Trauma,
Resuscitation and Emergency Medicine, 27(40).
Sanz-Martos, S., López-Franco, M. D., Álvarez-García, C.,
Granero-Moya, N., López-Hens, J. M., Cámara-
Anguita, S., Pancorbo-Hidalgo, P. L., & Comino-Sanz,
I. M. (2022). Drone applications for emergency and
urgent care: A systematic review. Prehospital and
Disaster Medicine, 37(4), 502–508.
Scalea, J. R., Restaino, S., Scassero, M., Blankenship, G.,
Bartlett, S. T., & Wereley, N. (2018). An initial
investigation of unmanned aircraft systems (UAS) and
real-time organ status measurement for transporting
human organs. IEEE Journal of Translational
Engineering in Health and Medicine, 6, 4000107.
Scott, J. E., & Scott, C. H. (2018). Models for drone
delivery of medications and other healthcare items.
International Journal of Healthcare Information
Systems and Informatics, 13(3), 20–34.
Shao, P. C., Lin, C. E., & Tsai, K. H. (2022). UAS medical
delivery in rural/mountain areas under UTM
surveillance. 2022 Integrated Communications,
Navigation and Surveillance (ICNS) Conference, 1–10.
Sharma, S., & Sharma, H. (2024). Drone: A technological
leap in health care delivery in distant and remote
inaccessible areas: A narrative review. Saudi Journal of
Anesthesia, 18(1), 95–99.
Stanton, D. (2020). Merck teams to deliver meds by drone.
BioProcess Insider. Retrieved from
https://www.bioprocessintl.com/global-markets/flew-
vaccine-merck-teams-to-deliver-meds-by-drone.
Stierlin, N., Risch, M., & Risch, L. (2024). Current
advancements in drone technology for medical sample
transportation. Logistics, 8(4), 104.
sUAS News. (2014). TU Delft’s ambulance drone
drastically increases chances of survival of cardiac
arrest patients. sUAS News. Retrieved from https://
www.suasnews.com/2014/10/tu-delfts-ambulance-dro
ne-drastically-increases-chances-of-survival-of-cardiac
-arrest-patients/.
The Times of India. (2023). 36km in 30 minutes: Drone for
medicines delivery in Uttarakhand hills. Times of India.
Retrieved from https://timesofindia.indiatimes.com/
city/dehradun/drone-delivers-meds-from-aiims-rishike
sh-to-uttarakhand-hospital/articleshowprint/97992202
.cms.
Vallvé, C., Artés, M., & Cobo, E. (2005). Estudios de
intervención no aleatorizados (TREND). Medicina
Clínica (Barc), 125(Supl. 1), 38-42.
Vodafone. (2019). World’s first diabetes drone completes
maiden flight. Vodafone News. Retrieved from
https://www.vodafone.com/news/technology/world-
first-diabetes-drone-completes-maiden-flight.
Wohlin, C. (2014). Guidelines for snowballing in
systematic literature studies and a replication in
software engineering. Proceedings of the 18th
International Conference on Evaluation and
Assessment in Software Engineering (EASE '14), 1–10.
Yakushiji, K., Fujita, H., Murata, M., Hiroi, N., Hamabe,
Y., & Yakushiji, F. (2020). Short-range transportation
using unmanned aerial vehicles (UAVs) during
disasters in Japan. Drones, 4(68), 1–8.
SIMULTECH 2025 - 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
26
