
Embodied AI in Mobile Robot Simulation with EyeSim: Coverage Path
Planning with Large Language Models
Xiangrui Kong
1 a
, Wenxiao Zhang
2 b
, Jin Hong
2 c
and Thomas Br
¨
aunl
1 d
1
Department of Electrical, Electronic and Computer Engineering, University of Western Australia, Crawley, Australia
2
Department of Computer Science and Software Engineering, University of Western Australia, Crawley, Australia
Keywords:
Natural Language Processing, Mobile Robots, Path Planning, Indoor Navigation.
Abstract:
In recent years, Large Language Models (LLMs) have demonstrated remarkable capabilities in understanding
and solving mathematical problems, leading to advancements in various fields. We propose an LLM-embodied
path planning framework for mobile agents, focusing on solving high-level coverage path planning issues and
low-level control. Our proposed multi-layer architecture uses prompted LLMs in the path planning phase and
integrates them with the mobile agents’ low-level actuators. To evaluate the performance of various LLMs,
we propose a coverage-weighted path planning metric to assess the performance of the embodied models. Our
experiments show that the proposed framework improves LLMs’ spatial inference abilities. We demonstrate
that the proposed multi-layer framework significantly enhances the efficiency and accuracy of these tasks by
leveraging the natural language understanding and generative capabilities of LLMs. Experiments conducted
in our EyeSim simulation demonstrate that this framework enhances LLMs’ 2D plane reasoning abilities and
enables the completion of coverage path planning tasks. We also tested three LLM kernels: gpt-4o, gemini-
1.5-flash, and claude-3.5-sonnet. The experimental results show that claude-3.5 can complete the coverage
planning task in different scenarios, and its indicators are better than those of the other models. We have made
our experimental simulation platform, EyeSim, freely available at https://roblab.org/eyesim/.
1 INTRODUCTION
The application of Large Language Models (LLMs)
has grown exponentially, revolutionizing various
fields with their advanced capabilities (Hadi et al.,
2023). Modern LLMs have evolved to perform var-
ious tasks beyond natural language processing. When
integrated into mobile agents, these LLMs can inter-
act with the environment and perform tasks without
the need for explicitly coded policies or additional
model training. This capability leverages the exten-
sive pre-training of LLMs, enabling them to general-
ize across tasks and adapt to new situations based on
their understanding of natural language instructions
and contextual cues.
Embodied AI refers to artificial intelligence sys-
tems integrated into physical entities, such as mo-
bile robots, that interact with the environment through
a
https://orcid.org/0000-0001-5066-1294
b
https://orcid.org/0009-0000-5196-8562
c
https://orcid.org/0000-0003-1359-3813
d
https://orcid.org/0000-0003-3215-0161
sensors and actuators (Chrisley, 2003). The integra-
tion of LLMs with embodied AI in applications such
as autonomous driving (Dorbala et al., 2024) and hu-
manoid robots (Cao, 2024) demonstrates their poten-
tial. However, the application of LLMs in controlling
mobile robots remains challenging due to issues such
as end-to-end control gaps, hallucinations, and path
planning inefficiencies. LLMs possess the capability
to solve mathematical problems, which directly aids
in path planning methods (Gu, 2023).
Path planning and obstacle avoidance are critical
for the effective operation of mobile robots, ensur-
ing safe and efficient navigation in dynamic environ-
ments (Hewawasam et al., 2022). Coverage path plan-
ning is a typical method employed in various research
areas, such as ocean seabed mapping (Galceran and
Carreras, 2012), terrain reconstruction (Torres et al.,
2016), and lawn mowing (Hazem et al., 2021). Tra-
ditional path planning methods include algorithms
such as A* (Warren, 1993), D* (Ferguson and Stentz,
2005), and potential field methods (Barraquand et al.,
1992). Given a global map, a path-planning method
can be framed as a mathematical problem solvable by
Kong, X., Zhang, W., Hong, J., Bräunl and T.
Embodied AI in Mobile Robot Simulation with EyeSim: Coverage Path Planning with Large Language Models.
DOI: 10.5220/0013455100003970
In Proceedings of the 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2025), pages 185-192
ISBN: 978-989-758-759-7; ISSN: 2184-2841
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
185
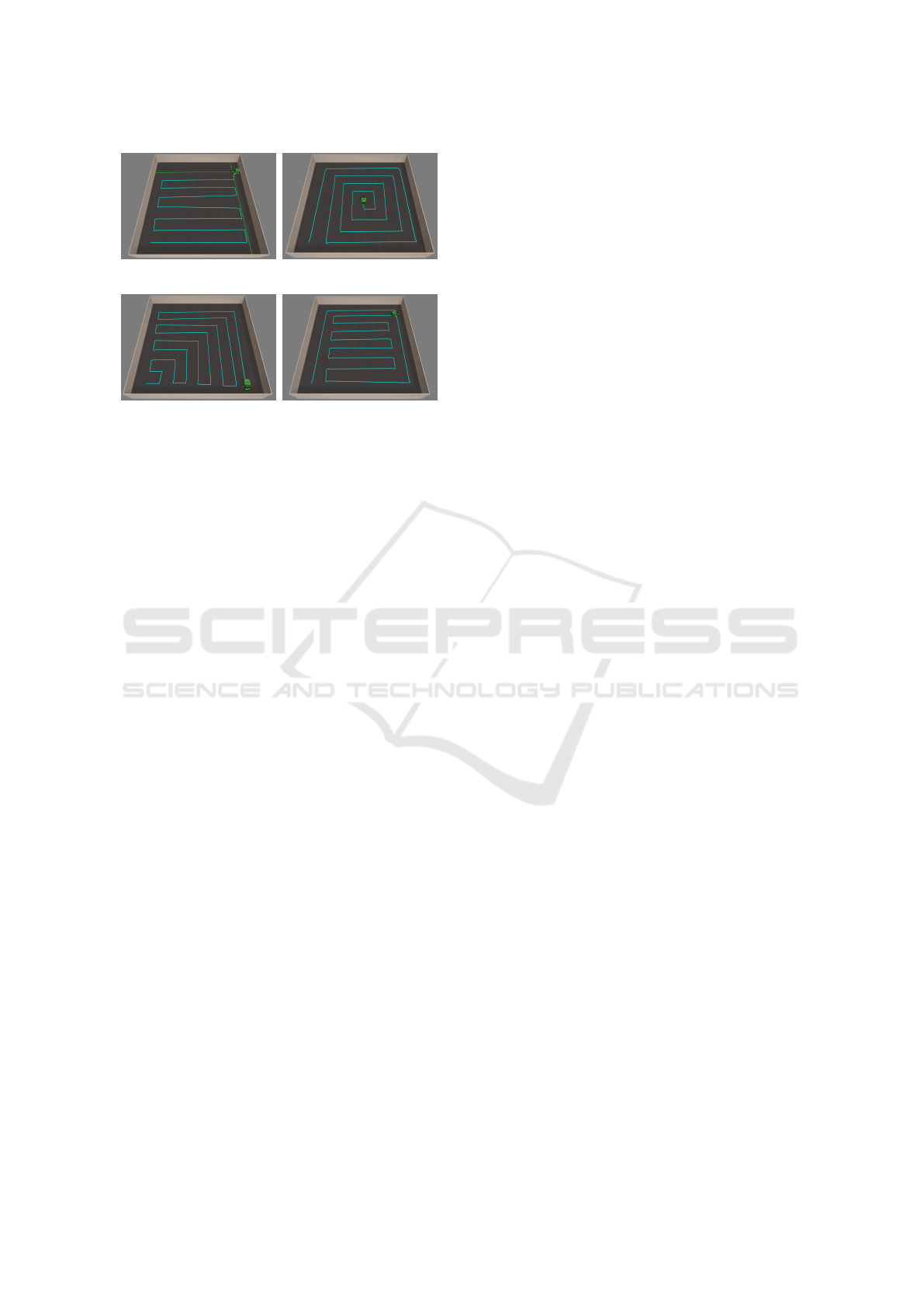
(a) Standard lawnmower (b) Square spiral
(c) Square move (d) Lawnmower + wall following
Figure 1: Comparison of Path Planning Patterns generated
by prompted LLMs.
LLMs. In this context, we simplify some traditional
path-planning methods and test LLMs in our mobile
robot simulator. LLMs demonstrate their ability to
solve mathematical problems collaboratively (Zhang
et al., 2024). The EyeSim VR is a multiple mo-
bile robot simulator with VR functionality based on
game engine Unity 3D that allows experiments with
the same unchanged EyeBot programs that run on the
real robots (Br
¨
aunl, 2020), which is capable of simu-
lating all major functionalities in RoBIOS-7. We have
made our experimental simulation platform, EyeSim,
freely available at https://roblab.org/eyesim/.
This paper presents a multi-layer coverage path
planner based on existing multimodal large language
models. It involves the static low-dimensional decon-
struction of unstructured maps, abstracting spatial re-
lationships into mathematical problems for reasoning
and solving by prompted LLMs. The reasoning accu-
racy of the LLM is enhanced through multi-turn dia-
logues and multimodal interactions. The inferred re-
sults from the LLM are combined with the control in-
terface, enabling the mobile agent to control the robot
in real time for path planning. Simulation experi-
ments demonstrate that LLMs possess path-planning
capabilities in unstructured static maps.
2 RELATED WORKS
2.1 LLMs in Mobile Robots
Currently, LLMs are involved in various aspects of
mobile robots, including code writing, model train-
ing, action interpretation, and task planning. LLMs
can process new commands and autonomously re-
compose API calls to generate new policy code
by chaining classic logic structures and referencing
third-party libraries (Liang et al., 2023). LLMs have
also been used to automatically generate reward al-
gorithms for training robots to learn tasks such as
pen spinning (Ma et al., 2024). PaLM-E, an embod-
ied language model trained on multi-modal sentences
combining visual, state estimation, and textual input
encodings, demonstrates the versatility and positive
transfer across diverse embodied reasoning tasks, ob-
servation modalities, and embodiments (Driess et al.,
2023). LLMs have shown promise in processing and
analyzing massive datasets, enabling them to uncover
patterns, forecast future occurrences, and identify ab-
normal behaviour in a wide range of fields (Su et al.,
2024). VELMA is an embodied LLM agent that gen-
erates the next action based on a contextual prompt
consisting of a verbalized trajectory and visual obser-
vations of the environment (Schumann et al., 2024).
Sharma et al. propose a method for using natural lan-
guage sentences to transform cost functions, enabling
users to correct goals, update robot motions, and re-
cover from planning errors, demonstrating high suc-
cess rates in simulated and real-world environments
(Sharma et al., 2022).
There is also some research applying LLMs in
zero-shot path planning (Chen et al., 2025). The
3P-LLM framework highlights the superiority of the
GPT-3.5-turbo chatbot in providing real-time, adap-
tive, and accurate path-planning algorithms compared
to state-of-the-art methods like Rapidly Exploring
Random Tree (RRT) and A* in various simulated sce-
narios (Latif, 2024). Singh et al. describe a program-
matic LLM prompt structure that enables the genera-
tion of plans functional across different situated envi-
ronments, robot capabilities, and tasks (Singh et al.,
2022). Luo et al. demonstrate the integration of a
sampling-based planner, RRT, with a deep network
structured according to the parse of a complex com-
mand, enabling robots to learn to follow natural lan-
guage commands in a continuous configuration space
(Kuo et al., 2020). ReAct utilizes LLMs to generate
interleaved reasoning traces and task-specific actions
(Yao et al., 2022). These methods typically use LLMs
to replace certain components of mobile robots. The
development of a hot-swapping path-planning frame-
work centred around LLMs is still in its early stages.
2.2 Path Planning Method
Path planning for mobile robots involves determin-
ing a path from a starting point to a destination on
a known static map (Ab Wahab et al., 2024). Ob-
stacle avoidance acts as a protective mechanism for
SIMULTECH 2025 - 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
186

the robot, enabling interaction with obstacles encoun-
tered during movement. Low-level control connects
algorithms to different types of system agents, such
as UAVs, UGVs, or UUVs (Ali and Israr, 2024).
In addition to the A* and D* algorithms mentioned
in the previous chapter, path planning algorithms in-
clude heuristic optimization methods based on pre-
trained weights, such as genetic algorithms (Castillo
et al., 2007), particle swarm optimization (Dewang
et al., 2018), and deep reinforcement learning (Panov
et al., 2018). These pre-trained methods do not di-
rectly rely on prior knowledge but utilize data to pre-
train weights. The obstacle avoidance problem ad-
dresses dynamic obstacles encountered during move-
ment, ensuring the safety of the mobile agent. Main-
stream methods include the Artificial Potential Field.
The coverage path planning problem is a branch
of path planning problems. Compared with point-to-
point path planning, a coverage waypoint list needs to
cover the given area as much as possible (Di Franco
and Buttazzo, 2016). Classically, decomposing a
given map based on topological rules and then apply-
ing a repeatable coverage pattern is a common way to
solve this issue following the divide-and-conquer al-
gorithm (Palacios-Gas
´
os et al., 2018; Petitjean, 2002;
Smith, 1985). In this way, a known map is required to
start, whereas the Traveling Salesman Problem (TSP),
an optimization problem that seeks to determine the
shortest possible route for a salesman to visit a given
set of cities exactly once and return to the original
city, offers another solution to solve it in a node graph
(Hoffman et al., 2013). Figure 1 presented showcases
a comparison of four distinct path-planning patterns
employed in robotic navigation. The first pattern, la-
belled as a standard lawnmower (Figure 1a), utilizes
a standard back-and-forth sweeping motion to ensure
comprehensive coverage of the area. The second pat-
tern, square spiral (Figure 1b), depicts a robot fol-
lowing an inward spiral trajectory, efficiently cover-
ing the space in a continuous inward motion. The
third pattern, square move (Figure 1c), illustrates a
robot navigating in a sequential inward square for-
mation, progressively moving towards the centre. Fi-
nally, the lawnmower after wall following (Figure 1d)
combines two approaches: initially, the robot adheres
to the perimeter of the wall following area, and subse-
quently, it adopts a lawnmower pattern to cover the re-
maining interior space. This comparative analysis of
path planning strategies highlights the versatility and
application-specific advantages of each method in en-
suring thorough area coverage in robotic navigation
tasks.
3 METHODOLOGY
As depicted in Figure 2, our method is divided into
three main sections: global planning, waypoint eval-
uation, and navigation. In global planning phase, a
coverage planning task in a given map is decomposed
into a cell map, and the additional requirement is de-
signed using natural language with a simplified for-
mat to decompose LLM responses. During the way-
point evaluation phase, the LLM responses are further
evaluated before execution. The theoretical coverage
rate and the theoretical shortest path distance are cal-
culated in this phase. Once the desired path passes
the evaluation, the planned warpaint list transitions to
the navigation phase. In navigation phase, the mo-
bile agent simply travels through them one by one and
triggers the safety mechanism if the sensor shows a
threshold distance between the robot and an unknown
obstacle.
3.1 Global Planning
We design a waypoint generation prompt with natural
language describing 2D grid maps like a chessboard
to simplify the inference difficulty of LLMs. During
the global phase, a prompt contains the size of the
grid map, current location, and response format. We
assume the LLM generates the desired waypoint list
with a required format which is a local position se-
quence separated with a bar sign. In order to evaluate
the performance and excitability of the planned path,
the desired waypoint list is visualised and calculated
in the phrase of waypoint evaluation. Considering the
robot’s kinematic limitation, we prompt a description
of mobile agents including equipped sensors, driving
commands, and basic status. We experimented with
various settings to describe robot behaviors in con-
versations with ChatGPT. However, we observed that
these changes in description had minimal impact on
the output responses. We use OpenAI GPT-4o ser-
vices (Achiam et al., 2023), a multimodal efficient
model for inference and reasoning. The temperature
parameter with the range from 0 to 2 is set as 0.6 with
our prompt for a consistent planned path. Lower val-
ues for temperature result in more consistent outputs,
while higher values generate more diverse and cre-
ative results.
3.2 Waypoint Evaluation
The response from the LLMs can occasionally be in-
correct, leading us to design a waypoint evaluator to
mitigate hallucinations. Initially, the desired way-
point list is visualized on a 2D map, providing a clear
Embodied AI in Mobile Robot Simulation with EyeSim: Coverage Path Planning with Large Language Models
187
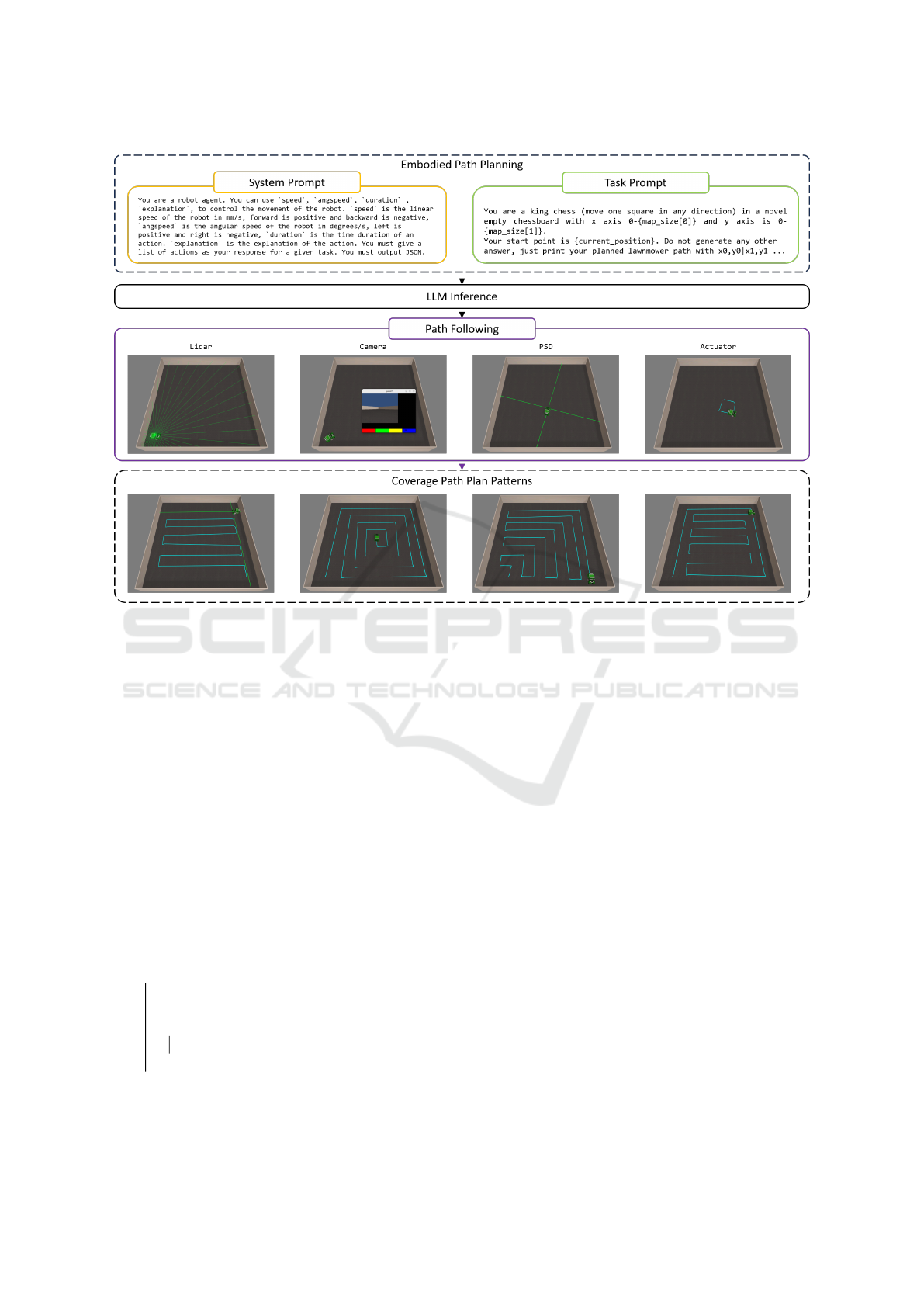
Figure 2: Multi-layer embodied path planning framework.
and precise layout of the proposed route. The shortest
path and the number of turns are then calculated math-
ematically to ensure efficiency and feasibility. Paths
that do not meet the required criteria are rejected and
not converted into a driving command list. The de-
signed dialogue system initiates as soon as the agent
receives the task command and map, continuing un-
til a waypoint list passes the evaluation. This ensures
that only optimal routes are considered for execution.
Once the mobile agent begins driving, the task cannot
be altered, guaranteeing consistency and reliability in
task completion.
Algorithm 1 begins by initializing key parameters:
the maximum number of iterations N, the evaluation
Data: N, θ, p
t
, s
0
Result: P ← {p
t
, s
0
}
initialization;
while n < N do
W ← Φ(P ) // LLM inference ;
r, τ ← E (W);
if r, τ > θ then
W;
end
end
Algorithm 1: Initialization.
threshold θ, the target position p
t
, and the starting po-
sition s
0
. A prompt P is created, containing the task
description and current position, which is then used
by the LLM to generate waypoints. The LLM infer-
ence function Φ produces a list of waypoints W based
on this prompt, taking into account the grid map, cur-
rent location, and required response format. As the al-
gorithm iterates, it evaluates the generated waypoints
using the evaluation function E , which calculates the
shortest path r and the number of turns τ. If the cal-
culated path metrics r and τ exceed the predefined
threshold θ, the waypoint list is considered feasible
and returned. This loop continues until a valid way-
point list is identified or the maximum number of it-
erations is reached. The algorithm ensures that only
optimal routes are considered, thus providing a ro-
bust framework for waypoint generation and evalu-
ation. This process incorporates global planning and
rigorous waypoint evaluation to leverage LLM capa-
bilities while ensuring safe and reliable path execu-
tion for mobile agents.
3.3 Waypoint Navigation
After evaluating the waypoint list, the mobile agent
begins to iterate through the waypoints. Due to po-
SIMULTECH 2025 - 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
188

while w
i
in W do
s ← O ;
s
′
← W ;
a ← Γ(s, s
′
) //Choose a method ;
∆ ← ||s − s
′
|| ;
if ∆ < d then
continue
end
end
Algorithm 2: Execution.
tential sensor errors and the intricacies of the path-
following method, it is essential for the mobile agent
to appropriately select the following method. Simple
waypoint following methods such as the dog curve
and turn-and-drive can be employed to navigate the
waypoints with a fixed distance. These methods en-
able the mobile agent to follow the sequence of way-
points with smooth and accurate navigation along the
route.
In our approach, we decompose this procedure
using a status transform matrix that maps the next
driving command based on the current heading, cur-
rent position, and the next waypoint. This matrix al-
lows for dynamic adjustment and precise control dur-
ing navigation. Additionally, the designed safety sys-
tem ensures the execution is safe by preventing col-
lisions with unknown obstacles. This is achieved us-
ing a position-sensitive detector and LIDAR beams,
which continuously monitor the environment and pro-
vide real-time feedback for obstacle avoidance.
A algorithm 2 iterates over each waypoint w
i
in
the list W . The current position s is updated us-
ing odometry data O, and the next waypoint s
′
is
converted from the waypoint list W . The following
method is chosen based on the action command a,
which is determined by the selected path following
function Γ(s, s
′
). The distance ∆ between the current
position s and the next waypoint s
′
is calculated. If
the distance ∆ is less than a predefined threshold d,
the algorithm continues to the next waypoint.
4 EXPERIMENT
4.1 Implement Details
This framework has been implemented on EyeBot
simulator (Br
¨
aunl, 2023). The EyeBot simulator with
virtual reality EyeSim VR is a multiple mobile robot
simulator with VR functionality based on game en-
gine Unity 3D that allows experiments with the same
unchanged EyeBot programs that run on the real
robots. We adjust the environmental values based on
the task map from 5 × 5 to 11 × 11. In each map,
the mobile agent is at a random starting position and
runs the proposed method in 10 episodes, and all per-
formance metrics are averaged. Three large language
models are evaluated in the experiment including gpt-
4o, gemini-1.5-flash and claude-3.5-sonnet with the
same system prompt and default temperature shown
in Figure 2.
4.2 Metrics
We referenced the metrics from (Anderson et al.,
2018) and (Zhao et al., 2021), including success rate,
average distance, and coverage rate. The success rate
indicates whether the paths generated by LLMs can
cover the designated area. Average distance repre-
sents the average path length of the mobile robot,
while coverage rate is a metric specific to coverage
methods, used to assess the completeness of coverage
path planning algorithms.
In traditional navigation evaluation standards, task
termination is determined by the distance between the
agent and the target point, which is effective for path
planning problems with clearly defined start and end
points. However, for coverage path planning algo-
rithms, the generated paths do not have a clear end-
point, and the coverage path is autonomously decided
by the LLM. Therefore, we have added a coverage
rate metric to the comprehensive evaluation standards
referenced from the cited sources. Inspired by Suc-
cess weighted Path Length (SPL) from (Anderson
et al., 2018), we will refer to the following measure
as CPL, short for Coverage weighted by (normalized
inverse) Path Length:
CPL =
1
N
N
∑
i=1
A
i
¯
A
i
l
i
max(p
i
, l
i
)
(1)
where N means the number of test episodes. A
i
and
¯
A
i
indicate the area of the coverage path and the
area of the mission area, respectively. The ratio of A
i
and
¯
A
i
is expressed as the Coverage Rate (CR), which
is used to evaluate the completeness of the path. The l
i
means the theoretical shortest path distance from the
mobile agent start point, and the p
i
is the Path Length
(PL) of the moving path by the agent.
4.3 Results and Analysis
The performance and time analysis are shown in Ta-
ble 1 and Table 2. All three models demonstrate
the ability to plan a coverage path in a square space
with a random start position. However, as the map
size increases, the coverage rate decreases by ap-
proximately 5% to 10%, though all models maintain
Embodied AI in Mobile Robot Simulation with EyeSim: Coverage Path Planning with Large Language Models
189
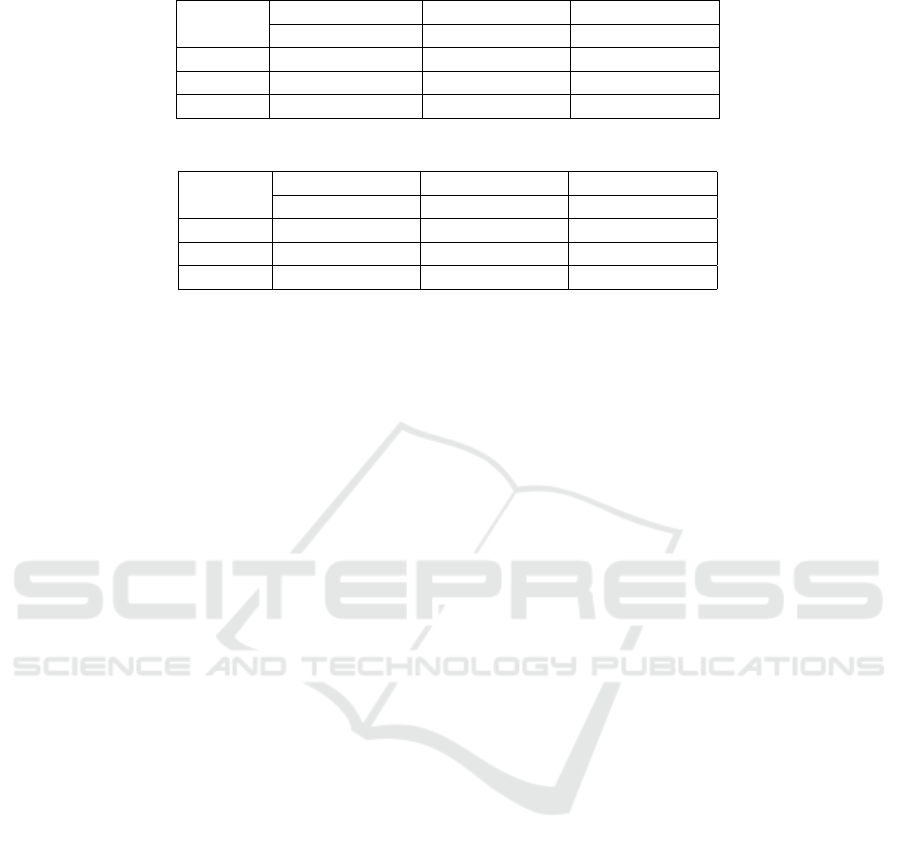
Table 1: Zero-shot coverage path planning performance using multiple LLM services in various environments.
Map Size
GPT-4o Gemini-1.5 Claude-3.5
CPL↑ PL↓ CR↓ CPL PL CR CPL PL CR
5 × 5 0.95 34.2 96.4 0.87 44.5 87.8 0.99 37.2 100
7 × 7 0.86 56.9 86.7 0.81 61.1 82.0 0.97 65.9 97.6
11 × 11 0.78 116 79.7 0.67 124 68.1 0.98 147 97.7
Table 2: Preceding and execution time analysis.
Map Size
GPT-4o Gemini-1.5 Claude-3.5
T T
i
T
d
T T
i
T
d
T T
i
T
d
5 × 5 84.6 2.93 81.5 107 3.20 104 85.9 2.81 83.1
7 × 7 129 4.94 124 125 3.67 121 130 3.18 127
11 × 11 169 9.47 160 157 5.56 151 184 5.84 178
a coverage rate above 65%. As shown in Table 1,
the model claude-3.5-sonnet exhibits the best perfor-
mance among the three models in terms of cover-
age rate and weighted path length. Changes in map
size do not significantly affect the coverage rate and
weighted path for the model gemini-1.5-flash. Con-
versely, the model gpt-4o achieves a higher coverage
rate with smaller map sizes, but this rate decreases
as the map size increases. As the map size grows,
the actual path length increases more rapidly than
the weighted path length, indicating that the planned
paths include repeated visits to the same cells based
on the random start position.
The differences in path length are attributed to
the coverage rate of the planned path and the mobile
agent’s hardware capabilities, such as sensors and ac-
tuators. Since the evaluation processes locally with
a short time cost (less than 300ms), we sum the in-
ference time and the evaluation time as T
i
. T and T
d
represent the total time spent and the driving part time
cost, respectively.
Model claude-3.5-sonnet performs best and ex-
hibits the fastest inference time in the experiment,
planning fully coverage waypoints in various envi-
ronments. Model gpt-4o shows stable performance
across different map sizes, demonstrating robustness
and reliability. However, it is noted that the model’s
performance declines slightly as the map size in-
creases, which could be attributed to the complex-
ity of managing larger spaces and more waypoints.
Model gemini-1.5-flash, on the other hand, main-
tains consistent performance regardless of map size,
although it occasionally introduces extra line break
marks in its responses, which could be due to format-
ting issues within the LLM’s output generation pro-
cess.
Additionally, the path length differences highlight
the varying capabilities of the mobile agents’ hard-
ware, such as sensor accuracy and actuator precision,
which directly impact the execution of the planned
paths. The evaluation process, which includes both
inference and validation, ensures that the paths are not
only feasible but also optimized for efficiency.
Overall, the claude-3.5-sonnet model excels in
both performance and speed, making it ideal for sce-
narios requiring rapid and thorough coverage. The
gpt-4o model offers balanced performance with sta-
bility across various map sizes, making it a versatile
choice. The gemini-1.5-flash model, despite minor
formatting issues, proves to be reliable with consis-
tent performance. These insights can guide the selec-
tion of appropriate LLM services for specific cover-
age path planning tasks in mobile robotics.
5 CONCLUSIONS
We propose a novel embodied framework for mobile
agents, incorporating weighted evaluation metrics for
the specific task of coverage path planning. A key fac-
tor of the framework is the use of zero-shot prompts to
simplify LLM inference during the initial phase. This
approach leverages the power of LLMs to generate ef-
fective waypoints without the need for extensive train-
ing data, thus streamlining the path-planning process.
During the navigation phase, we introduced a robust
safety mechanism for mobile agents to avoid obsta-
cles. This mechanism ensures that the mobile agents
can navigate safely and efficiently in dynamic envi-
ronments. Our experiments demonstrate that current
LLMs have the capability to function as an embod-
ied AI brain within mobile agents for specific tasks,
such as area coverage, when guided by appropriately
designed prompts.
The competition among LLM companies has sig-
nificantly advanced the field, freeing researchers from
the traditional labelling-training-validation loop in AI
research. This shift allows for more focus on inno-
SIMULTECH 2025 - 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
190

vative applications and real-world deployment of AI
technologies. Future research will focus on evaluat-
ing path-planning problems in more realistic scenar-
ios and simulation environments. This includes in-
tegrating more complex environmental variables and
constraints to further evaluate and enhance the robust-
ness of the proposed framework. Additionally, ex-
ploring the scalability of LLMs in diverse and larger-
scale applications will be crucial in advancing the
practical deployment of embodied AI systems in mo-
bile robotics.
REFERENCES
Ab Wahab, M. N., Nazir, A., Khalil, A., Ho, W. J., Ak-
bar, M. F., Noor, M. H. M., and Mohamed, A. S. A.
(2024). Improved genetic algorithm for mobile robot
path planning in static environments. Expert Systems
with Applications, 249:123762.
Achiam, J., Adler, S., Agarwal, S., Ahmad, L., Akkaya, I.,
Aleman, F. L., Almeida, D., Altenschmidt, J., Altman,
S., Anadkat, S., et al. (2023). Gpt-4 technical report.
arXiv preprint arXiv:2303.08774.
Ali, Z. A. and Israr, A. (2024). Motion Planning for Dy-
namic Agents. BoD–Books on Demand.
Anderson, P., Chang, A., Chaplot, D. S., Dosovitskiy, A.,
Gupta, S., Koltun, V., Kosecka, J., Malik, J., Mot-
taghi, R., Savva, M., et al. (2018). On evalua-
tion of embodied navigation agents. arXiv preprint
arXiv:1807.06757.
Barraquand, J., Langlois, B., and Latombe, J.-C. (1992).
Numerical potential field techniques for robot path
planning. IEEE transactions on systems, man, and
cybernetics, 22(2):224–241.
Br
¨
aunl, T. (2020). Robot adventures in Python and C.
Springer.
Br
¨
aunl, T. (2023). Mobile Robot Programming: Adventures
in Python and C. Springer International Publishing.
Cao, L. (2024). Ai robots and humanoid ai: Re-
view, perspectives and directions. arXiv preprint
arXiv:2405.15775.
Castillo, O., Trujillo, L., and Melin, P. (2007). Multiple ob-
jective genetic algorithms for path-planning optimiza-
tion in autonomous mobile robots. Soft Computing,
11:269–279.
Chen, Y., Han, Y., and Li, X. (2025). Fastnav: Fine-tuned
adaptive small-language- models trained for multi-
point robot navigation. IEEE Robotics and Automa-
tion Letters, 10(1):390–397.
Chrisley, R. (2003). Embodied artificial intelligence. Arti-
ficial intelligence, 149(1):131–150.
Dewang, H. S., Mohanty, P. K., and Kundu, S. (2018). A
robust path planning for mobile robot using smart par-
ticle swarm optimization. Procedia computer science,
133:290–297.
Di Franco, C. and Buttazzo, G. (2016). Coverage path plan-
ning for uavs photogrammetry with energy and reso-
lution constraints. Journal of Intelligent & Robotic
Systems, 83:445–462.
Dorbala, V. S., Chowdhury, S., and Manocha, D. (2024).
Can llms generate human-like wayfinding instruc-
tions? towards platform-agnostic embodied instruc-
tion synthesis. arXiv preprint arXiv:2403.11487.
Driess, D., Xia, F., Sajjadi, M. S. M., Lynch, C., Chowd-
hery, A., Ichter, B., Wahid, A., Tompson, J., Vuong,
Q., Yu, T., Huang, W., Chebotar, Y., Sermanet, P.,
Duckworth, D., Levine, S., Vanhoucke, V., Haus-
man, K., Toussaint, M., Greff, K., Zeng, A., Mor-
datch, I., and Florence, P. (2023). Palm-e: An em-
bodied multimodal language model. In arXiv preprint
arXiv:2303.03378.
Ferguson, D. and Stentz, A. (2005). The field d* algo-
rithm for improved path planning and replanning in
uniform and non-uniform cost environments. Robotics
Institute, Carnegie Mellon University, Pittsburgh, PA,
Tech. Rep. CMU-RI-TR-05-19.
Galceran, E. and Carreras, M. (2012). Efficient seabed
coverage path planning for asvs and auvs. In 2012
IEEE/RSJ International Conference on Intelligent
Robots and Systems, pages 88–93. IEEE.
Gu, S. (2023). Llms as potential brainstorming part-
ners for math and science problems. arXiv preprint
arXiv:2310.10677.
Hadi, M. U., Qureshi, R., Shah, A., Irfan, M., Zafar, A.,
Shaikh, M. B., Akhtar, N., Wu, J., Mirjalili, S., et al.
(2023). A survey on large language models: Appli-
cations, challenges, limitations, and practical usage.
Authorea Preprints.
Hazem, S., Mostafa, M., Mohamed, E., Hesham, M., Mo-
hamed, A., Lotfy, E., Mahmoud, A., and Yacoub, M.
(2021). Design and path planning of autonomous so-
lar lawn mower. In International Design Engineering
Technical Conferences and Computers and Informa-
tion in Engineering Conference, volume 85369, page
V001T01A016. American Society of Mechanical En-
gineers.
Hewawasam, H., Ibrahim, M. Y., and Appuhamillage, G. K.
(2022). Past, present and future of path-planning al-
gorithms for mobile robot navigation in dynamic envi-
ronments. IEEE Open Journal of the Industrial Elec-
tronics Society, 3:353–365.
Hoffman, K. L., Padberg, M., Rinaldi, G., et al. (2013).
Traveling salesman problem. Encyclopedia of op-
erations research and management science, 1:1573–
1578.
Kuo, Y.-L., Katz, B., and Barbu, A. (2020). Deep compo-
sitional robotic planners that follow natural language
commands.
Latif, E. (2024). 3p-llm: Probabilistic path planning using
large language model for autonomous robot naviga-
tion.
Liang, J., Huang, W., Xia, F., Xu, P., Hausman, K., Ichter,
B., Florence, P., and Zeng, A. (2023). Code as poli-
cies: Language model programs for embodied control.
Ma, Y. J., Liang, W., Wang, G., Huang, D.-A., Bastani, O.,
Jayaraman, D., Zhu, Y., Fan, L., and Anandkumar, A.
Embodied AI in Mobile Robot Simulation with EyeSim: Coverage Path Planning with Large Language Models
191

(2024). Eureka: Human-level reward design via cod-
ing large language models.
Palacios-Gas
´
os, J. M., Sag
¨
ues Blazquiz, C., and Monti-
jano Mu
˜
noz, E. (2018). Multi-Robot Persistent Cover-
age in Complex Environments. PhD thesis, PhD thesis,
Universidad de Zaragoza.
Panov, A. I., Yakovlev, K. S., and Suvorov, R. (2018).
Grid path planning with deep reinforcement learn-
ing: Preliminary results. Procedia computer science,
123:347–353.
Petitjean, S. (2002). A survey of methods for recovering
quadrics in triangle meshes. ACM Computing Surveys
(CSUR), 34(2):211–262.
Schumann, R., Zhu, W., Feng, W., Fu, T.-J., Riezler, S., and
Wang, W. Y. (2024). Velma: Verbalization embodi-
ment of llm agents for vision and language navigation
in street view. Proceedings of the AAAI Conference
on Artificial Intelligence, 38(17):18924–18933.
Sharma, P., Sundaralingam, B., Blukis, V., Paxton, C.,
Hermans, T., Torralba, A., Andreas, J., and Fox, D.
(2022). Correcting robot plans with natural language
feedback.
Singh, I., Blukis, V., Mousavian, A., Goyal, A., Xu, D.,
Tremblay, J., Fox, D., Thomason, J., and Garg, A.
(2022). Progprompt: Generating situated robot task
plans using large language models.
Smith, D. R. (1985). The design of divide and conquer algo-
rithms. Science of Computer Programming, 5:37–58.
Su, J., Jiang, C., Jin, X., Qiao, Y., Xiao, T., Ma, H., Wei,
R., Jing, Z., Xu, J., and Lin, J. (2024). Large language
models for forecasting and anomaly detection: A sys-
tematic literature review.
Torres, M., Pelta, D. A., Verdegay, J. L., and Torres, J. C.
(2016). Coverage path planning with unmanned aerial
vehicles for 3d terrain reconstruction. Expert Systems
with Applications, 55:441–451.
Warren, C. W. (1993). Fast path planning using modified a*
method. In [1993] Proceedings IEEE International
Conference on Robotics and Automation, pages 662–
667. IEEE.
Yao, S., Zhao, J., Yu, D., Du, N., Shafran, I., Narasimhan,
K., and Cao, Y. (2022). React: Synergizing reason-
ing and acting in language models. arXiv preprint
arXiv:2210.03629.
Zhang, R., Jiang, D., Zhang, Y., Lin, H., Guo, Z., Qiu, P.,
Zhou, A., Lu, P., Chang, K.-W., Gao, P., et al. (2024).
Mathverse: Does your multi-modal llm truly see the
diagrams in visual math problems? arXiv preprint
arXiv:2403.14624.
Zhao, M., Anderson, P., Jain, V., Wang, S., Ku, A.,
Baldridge, J., and Ie, E. (2021). On the evaluation
of vision-and-language navigation instructions.
SIMULTECH 2025 - 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
192
