
Research on Manual Carrier Landing Task in High Sea Conditions
XinZe Xu
1
, Guanxin Hong
1
and Liang Du
2
1
School of Aeronautic Science and Engineering, Beihang University, Beijing, 100191, China
2
Smart Aviation Center, Hangzhou Innovation Institute of Beihang University, Hangzhou, 311115, China
Keywords: Flight Mechanic, Pilot Model, Carrier Landing Task, Model Predictive Control, Simulation.
Abstract: A model for manual carrier-based aircraft landing missions was established for high sea condition
environments. The model includes pilot, aircraft, deck motion and carrier air wake. The pilot model uses an
intelligent structure, include perception, decision-making and execution modules. The perception module
considers the pilot's perception of unstructured and structured data processes, established through fuzzy
methods and Kalman filtering. The decision-making module is based on MPC (Model Predictive Control)
methods, considering the aircraft pilot's control characteristics based on trend prediction, enabling the
description of the pilot's control strategy under control input and rate constraints. The established pilot model
completed flight simulations in high sea conditions. Simulation results indicate that as sea condition levels
increase, the longitudinal trajectory deviation of manual landings significantly increases, with reduced
correction abilities for deviations caused by ship motion, reflecting the pilot's adaptive adjustment strategy
based on control resource margins under control rate and input constraints. As sea condition levels rise, the
distribution of touchdown point deviations during manual landings increases, posing significant safety risks,
validating that the manual landing model established in this study can be used to analyse the safety of aircraft
carrier landings in complex environments.
1 INTRODUCTION
Aircraft carriers are known as the most dangerous
operating airports in the world, with naval aviators
being the protagonists in this hazardous operating
environment. Currently, manual landing remains the
primary method for aircraft carrier landings. Statistics
show that 80% of accidents involving carrier-based
aircraft occur during the landing process (Haitao &
Yan, 2021; Wang, Jiang, Zhang, & Wen, 2022). In
manual landing mode, naval aviators of carrier-based
aircraft need to control three variables: speed,
altitude, and lateral deviation, requiring a high level
of precision in maintaining control. Providing a
comprehensive description of the control behaviour
of carrier-based aircraft pilots is difficult, hence
practical models that satisfy the closed-loop human-
machine system are typically established. Currently,
there are various practical pilot models available in
the field of carrier-based aircraft, categorized based
on modelling principles into classical control theory
models, physiology models, modern control theory
models, and intelligent models (Xu, Tan, Efremov,
Sun, & Qu, 2017). The classical control theory model
is established based on frequency domain criteria
proposed by McRuer and others. In the early days, the
U.S. military often used quasi-linear models to
describe the pitch channel control behaviour of pilots
during the approach phase of carrier-based aircraft
(D. T. McRuer & Jex, 1967). The physiology model
is based on the structural pilot model proposed by
Hess. Detailed explanations of this modelling
approach can be found in references 5-9. These
models are also based on identification results and are
typically single-channel models based on classical
control theory (Hess, 1980; Hess, 2006; Hess, 2019;
R. A. J. P. o. t. I. o. M. E. Hess, Part G: Journal of
Aerospace Engineering, 2008; M. M. Lone, Ruseno,
& Cooke, 2012). With the widespread application of
artificial intelligence, some scholars have also
introduced intelligent methods to construct model
parameters, extending this model to a wider range of
flight control tasks (Brutch & Moncayo, 2024;
Jakimovska, Pool, van Paassen, & Mulder, 2023).
The two types of models mentioned above mainly
address the description of pilot control behavior for
single-channel flight tasks (such as pitch angle
tracking), but due to their inherent characteristics,
they struggle to describe coupled control channel
operations. NASA reports that as task complexity
Xu, X., Hong, G., Du and L.
Research on Manual Carrier Landing Task in High Sea Conditions.
DOI: 10.5220/0013432600003970
In Proceedings of the 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2025), pages 175-184
ISBN: 978-989-758-759-7; ISSN: 2184-2841
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
175

increases, models based on frequency domain
identification results may prove insufficient (Baron,
Kleinman, & Levison, 1970; Kleinman, Baron, &
Levison, 1970).When it comes to multi-channel
control, even if it is possible to extend the
construction method of single-channel models to
multiple channels, it is challenging to address the
issue of model structure determination. It also
requires the decoupling of each channel, which limits
the application of quasi-linear models and structural
models in complex conditions involving multiple
inputs and multiple outputs.
Optimal pilot models based on modern control
theory have significant advantages in dealing with
multi-loop control problems. Since these models
describe the pilot's control behavior from the
perspective of overall performance based on optimal
assumptions, strict decoupling is not required (Lone
& Cooke, 2013; D. McRuer, Schmidt, & Dynamics,
1990). The main difference between the optimal pilot
model and the structural model lies in its modeling,
which is not based on frequency domain
identification criteria but on an assumption that aligns
with natural intuition: that human pilot control
behavior is to some extent optimal. The validity of
this assumption has been studied extensively (Roig,
1962). Based on experience, pilots always aim to
maintain a phase margin of 50°-100°for the man-
machine system. In the low frequency range, the
pilot's control behavior is somewhat optimal, aligning
with some theories in optimal control theory (Myers,
Johnston, & McRuer, 1982). Based on the optimal
assumption, discussing the pilot's control behavior
from the perspective of overall performance
optimization becomes feasible. By designing a
reasonable model structure, the optimal model can be
gradually extended to a wider range of flight tasks,
such as the LQR pilot model, MOCM-AE pilot model,
etc. The successful applications of these models have
all demonstrated the validity of extrapolating models
based on the optimal assumption (Davidson &
Schmidt, 1992; Wierenga, 1969).
The ship motion induced by high sea conditions
and complex ship wakes are important environmental
variables affecting the safety of ship landings. A
rising ship wake increases the risk of collision.
Stronger ship wakes and optical guidance motions
caused by heaving and pitching movements further
increase tracking difficulties (optical guidance
typically operates in a line-stabilized form, only able
to counteract ship rotations causing motion in the
optical sphere). This necessitates pilots to focus more
on controlling the overall flight trends. The optimal
assumption is currently the most suitable assumption
for establishing a MIMO human-machine system
pilot model. Therefore, this paper adopts a
constrained MPC method based on the optimal
assumption to establish the pilot model. Within the
constraint range, this model is equivalent to the LQG
pilot model, which has been proven applicable in
describing pilot control behavior. At the constraint
boundaries, by setting reasonable physical constraints,
pilot operations align more with realworld scenarios.
The main innovation of this paper is the
establishment of a pilot model for landing task,
integrating the pilot's predictions and dynamic
constraints during the landing process. Based on the
closed-loop human-machine system established,
which includes the ship motion, aircraft, pilot, and
environment, research on flight safety under high sea
conditions was conducted. This paper investigates the
manual carrier landing task under high sea conditions.
In this section, the research status of this field is
elucidated. The paper describes in the second section
the pilot model established based on the MPC method,
and supplements necessary carrier aircraft, ship
motion, and ship wake engineering models in the
third section to close the human-machine system loop.
Based on the established human-machine system,
simulation experiments of the manual carrier landing
task under high sea conditions are conducted in the
fourth section, discussing the results, and
summarizing the conclusions in the fifth section.
2 PILOT MODEL BASED ON MPC
METHOD
2.1 Overview of Manual Landing Task
The manual landing task of carrier-based aircraft is a
complex task, requiring pilots to manage variables in
three channels: pitch, altitude, and lateral deviation,
based on multiple perceptual information. To
establish a manual landing model for high sea
conditions, it is necessary to have a comprehensive
understanding of carrier landing missions. This
section, based on the description of carrier landing
missions, constructs a conceptual manual landing
model structure: the aircraft captures the desired glide
slope window from a distance behind the carrier. As
shown in Figure 1, guided by FLOLS, the aircraft
aligns with the ideal glide path and successively
completes the landing through a safety window.
Due to the movement of the carrier and the
disturbance caused by the carrier's airflow wake, it is
nearly impossible to maintain the flight path
SIMULTECH 2025 - 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
176

accurately. To minimize risks, landing signal officers
are typically stationed on the carrier deck to assist
pilots during landings. LSO are usually experienced
pilots who guide the pilot by predicting aircraft trends
for the next 2-3 seconds and ship movements. They
provide verbal commands like "high" or "low" to help
the pilot adjust their trajectory, which can be seen as
a way of introducing future information into the
guidance process.
In addition to the verbal commands from the LSO,
pilots also obtain the height deviation angle Δ𝑒
through the FLOLS optical guidance system during
the landing process. The literature outlines the
working principles of optical guidance for carrier
landings (Chen, Tan, Qu, & Li, 2018). The optical
guidance system provides feedback on the deviation
angle between the carrier-based aircraft and the ideal
glide path. There are various modelling processes
involved in how pilots handle this guidance
information (Chen et al., 2018; SCHMIDT, 1988).
This article uses the Kalman filtering method to
establish the process by which pilots convert the
deviation angle ∆𝑒 to height deviation ∆𝐻 as they
approach the stern of the carrier. The pilots
continuously self-correct based on observation
results, incorporating observation noise v to simulate
the pilots' observation deviation. The implementation
is as follows: first, establish the state equations for
optical ball displacement and height deviation. The
relationship between the height deviation angle Δ𝑒,
height deviation Δ𝐻, and distance from the carrier
𝑅
is as follows:
Δ𝑒=
8
3
∗
Δ𝐻
𝑅
(1)
It can be observed that the value of the deviation
angle is inversely proportional to the distance from
the carrier. By taking X
=
∆
, introducing
system noise w and observation noise v, the state
transition equation for the FLOLS system can be
derived:
𝑋
(
𝑘+1
)
=
𝐴
X
(
𝑘
)
+𝑤
𝑍=𝐶
X
(
𝑘
)
+𝑣
(2)
The pilot's estimate of the height deviation ∆𝐻
can be represented by equation (3), where F is the
Kalman gain, and X
is the estimate state of X
:
∆𝐻
=𝐴
X
(
𝑘−1
)
+𝐹∗
𝑍−𝐶
∗𝑋
(
𝑘
)
(3)
This article adopts the structure of intelligent pilot:
perception, decision and execution to establish the
pilot model. The manual approach landing model
structure is shown in Figure 1, where G(s) represents
the pilot's action execution transfer function, and the
perception model is as shown in equations (1-3). The
next section will establish the pilot decision model to
obtain the final actual operational instruction 𝑢
.
Perception
Information
Pilot
Decision
Model
Uc
G(s)
Ship, Aircraft and Environment
Model
Up
Pilot Perception
Model
Decision
Information
Figure 1: Perception, Decision, Action-Based Pilot Model
Structure.
To make the model closely resemble the actual
landing process, this article also designs the following
assumptions to make the pilot model fit human
capabilities to the greatest extent possible. The
specific assumptions are as follows:
1. Throughout the entire process, noise generated
by the pilot's own physiological characteristics
is assumed to be common zero-mean white
noise in nature, with noise within each time
interval being independent. The intensity of the
noise is linearly related to the task load.
2. The pilot will strive to make optimal decisions,
but only decisions within a limited time
interval will conform to the Bellman equation.
3. Regarding the dynamic characteristics of the
aircraft, the pilot has sufficient prior
knowledge for interpretation, and with the
assistance of the landing signal officer, can
roughly estimate the trend of changes in the
next 2-3 seconds. The pilot will not pre-
emptively act in response to unknown
disturbances.
4. The sampling time for the pilot model is 0.02
seconds.
2.2 Pilot Decision Making Models
Based on MPC Methods
The pilot model describes the process in which
pilots make operational decisions based on the
current state and future trends of the carrier-based
aircraft to output the desired operational instruction
𝑢
. Due to the need to minimize overshoot during
the landing process to avoid the risk of colliding
Research on Manual Carrier Landing Task in High Sea Conditions
177

with the carrier, trend prediction has become a key
focus of carrier-based aircraft pilot control
techniques. Pilots are required to smoothly mesh
with the carrier's movements to complete the
landing, which necessitates controlling the trends in
the next 2-3 seconds to counteract the optical ball
fluctuations caused by the carrier's heaving motion.
Considering the unique nature of carrier landing
missions, this article uses prediction and optimality
as two fundamental features and establishes the
pilot's decision model using MPC method.
The MPC method, similar to the LQR pilot model,
is based on optimal hypothesis to calculate the pilot's
gains, while the LQR model is widely used to
describe the pilot's control behaviour (Davidson &
Schmidt, 1992). Additionally, using the MPC method
can address constraint issues, which is crucial during
the landing process. The following sets up a pilot
model based on MPC, assuming the state space model
of the controlled object as:
𝑥(𝑘+1) =
𝐴
𝑥(𝑘)+𝐵𝑢
(k) + 𝐸𝑤
𝑦(𝑘) =𝐶𝑥(𝑘) +𝐷𝑢
(𝑘)
(4)
Where:
𝑥
(
𝑘+𝑃
)
=
𝐴
𝑥
(
𝑘
)
+
𝐴
𝐵𝑢
(
𝑘
)
+⋯
+𝐵𝑢
(
𝑘+𝑃−1
)
+
𝐴
𝐸𝑤
(5)
The recursive predictive model in Equation (5)
represents the pilot's predictive behaviour regarding
the flight state trends, where P is the pilot's prediction
horizon, m is the control horizon, and k is the discrete
step.
After establishing the mathematical model for
the pilot's predictive behaviour, the next step is to
establish explicit constraint equations reflecting the
physical constraints the pilot faces during the carrier
landing process. Constraints are common in the
pilot's working environment. The residual throttle
control resources left in the small perturbation
model established at the conventional operating
point usually range from only 10% to 15%. If hard
constraints are used in modelling, it could
potentially lead to divergence. Therefore, some
studies describe the pilot's control behaviour as a
highly constrained optimal linear controller. This
significantly affects the pilot's decision behaviour,
not only limiting the pilot's control performance but
also introducing intelligent human characteristics
based on control margins.
The advantage of the pilot model established in
this paper is its ability to explicitly handle constraint
issues. By introducing control constraints as
performance conditions into the performance index,
solving the pilot's control behaviour becomes a
planning problem. The control input constraints are
expressed as:
𝑢
(
)
≤𝑢
(
𝑘+𝑖
)
≤𝑢
(
)
(6)
∆𝑈
(
𝑘
)
≝
∆𝑢
(
𝑘
)
∆𝑢
(
𝑘+1
)
⋮
∆𝑢
(
𝑘+𝑚−1
)
(7)
∆𝑌
(
𝑘
)
≝
⎣
⎢
⎢
⎡
∆𝑦
(
𝑘+1
|
𝑘
)
∆𝑦
(
𝑘+2
|
𝑘
)
⋮
∆𝑦
(
𝑘+𝑝
|
𝑘
)
⎦
⎥
⎥
⎤
(8)
Clearly, the objective function J contains
inequalities, making it impossible to obtain an
analytically optimal pilot gain solution through
solving the Riccati equation. This is a typical
Quadratic Programming (QP) problem. Based on
Assumption 2, it is assumed that the pilot will
optimize the performance function at each sampling
instant.
Physically, the optimal gain represents the pilot's
control strategy that minimizes the overall deviation
of the flight state through a combination of
experience and the pilot's estimation of the flight
trends. By selecting appropriate Q and R values,
inhuman control behaviour can be avoided, typically
requiring state variables other than altitude and lateral
position not to exceed 1. QP problems are a classic
type of optimization problem for which mature
numerical optimization methods exist, making them
well-studied problems. Therefore, transforming the
pilot's decision problem into the standard form of a
QP problem allows for its solution. The standard form
of a QP problem is:
𝑚𝑖𝑛
𝑧
𝐻𝑧 −𝑔
𝑧,Where 𝐶𝑧≥𝑏
(9)
To standardize the predictive equation as in
Equation (8), we have:
𝑧=𝑈(𝑘)
𝐻=𝑆
𝑄
𝑄𝑆
+𝑅
𝑅
𝐺
(
𝑘+1
|
𝑘
)
=2𝑆
𝑄
𝑄𝐸
(
𝑘+1
|
𝑘
)
(10)
Therefore, the objective function transforms into:
𝐽
=∆𝑈
(
𝑘
)
𝐻∆𝑈
(
𝑘
)
−𝐺
(
𝑘+1
|
𝑘
)
∆𝑈
(
𝑘
)
(11)
SIMULTECH 2025 - 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
178
Where:
𝐸
(
𝑘+1
)
=𝑅
(
𝑘+1
)
−𝑆
∆𝑥
(
𝑘
)
−𝐼𝑦
(
𝑘
)
−𝑆
∆
𝑑
(12)
𝑆
=
⎣
⎢
⎢
⎢
⎢
⎢
⎢
⎡
𝐶𝐴
𝐶𝐴
⋮
𝐶𝐴
⎦
⎥
⎥
⎥
⎥
⎥
⎥
⎤
, 𝐼=
𝐼
×
𝐼
×
⋮
𝐼
×
, 𝑆
=
⎣
⎢
⎢
⎢
⎢
⎢
⎢
⎡
𝐶𝐵
𝐶𝐴
𝐵
⋮
𝐶𝐴
𝐵
⎦
⎥
⎥
⎥
⎥
⎥
⎥
⎤
𝑆
=
⎣
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎡
𝐶𝐵 0 0 … 0
𝐶𝐴
𝐵
𝐶𝐵 0 … 0
⋮⋮⋮⋱⋮
𝐶𝐴
𝐵
𝐶𝐴
𝐵
…… 𝐶𝐵
⋮⋮⋮⋱⋮
𝐶𝐴
𝐵
𝐶𝐴
𝐵
…… 𝐶𝐴
𝐵
⎦
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎤
Although physical plant constraints are constant,
in the model above, control constraints depend on the
control margin at the current sampling instant.
Therefore, the constraints are time varying. For any
arbitrary time 𝑡
, after discretization, we have:
∆𝑢
(
)
=𝑢
(
)
−𝑢
(
𝑘
)
∆𝑈
(
)
≝
⎣
⎢
⎢
⎡
𝑢
(
)
−𝑢
(
𝑘−1
)
𝑢
(
)
−𝑢
(
𝑘
)
⋮
𝑢
(
)
−𝑢
(
𝑘+𝑚−1
)
⎦
⎥
⎥
⎤
(13)
Therefore, by considering the form of ∆U(k), the
inequality structure can be obtained as:
−𝐼
𝐼
∆𝑈
(
𝑘
)
≥∆𝑈
(
𝑘
)
(14)
Consequently, we have transformed the pilot's
decision problem into the standard form of a QP
problem. Numerical optimization methods for QP
problems are well established, such as interior point
methods, which can be used for solving. I will not
delve into details here. Once we obtain the pilot gain
𝐾
, we will have established a complete decision-
making model to derive the pilot's desired command
𝑢
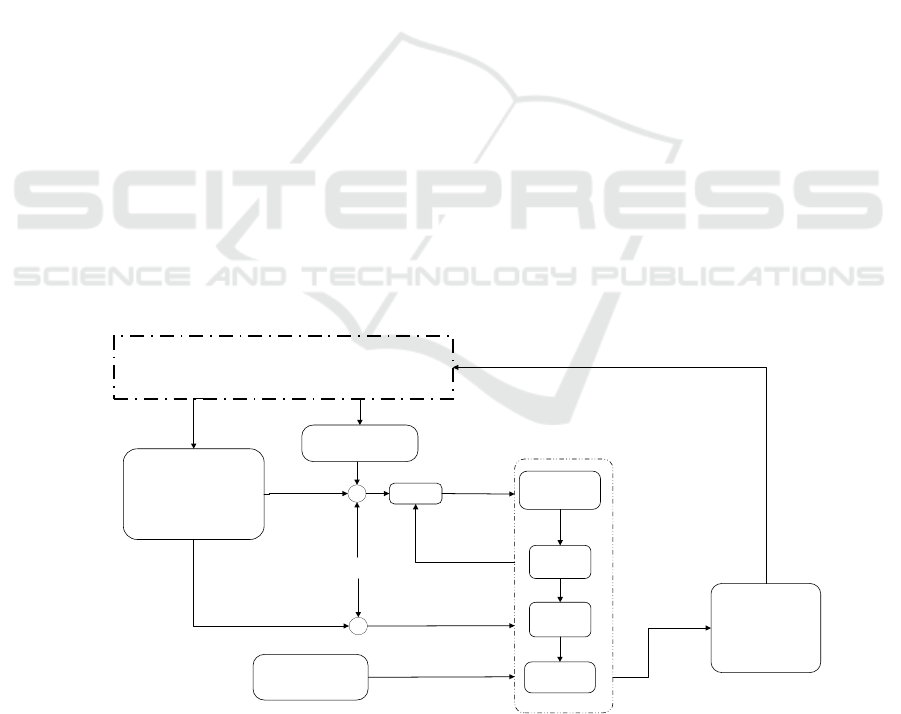
.In conclusion, the overall structure of the pilot
model with constraints added is illustrated in Figure 2.
3 AIRCRAFT SYSTEM
3.1 Aircraft System Model
To study the artificial landing model of carrier-based
aircraft in high sea conditions, it is necessary to
establish a model of the carrier-based aircraft. The
dynamic characteristics of the carrier-based aircraft
model will significantly impact the pilot's landing
performance. In landing tasks, the aerodynamic
effects of the carrier-based aircraft generally satisfy
the assumption of small disturbances, thus a linear
system is used to establish the model of the carrier-
based aircraft (Sweger, 2003). The dynamic equation
is as follows
𝑥=
𝐴
𝑥+𝐵𝑢+𝐸𝑤
y
=𝐶𝑥+𝐷𝑢
(15)
Fuzzy Perception
System
Altitude Deviation
ObservationΔe
Estimator
Altitude Deviation
EstimateΔH
K
Lateral Deviation
ObservationΔe
v
Lateral Deviation
EstimateΔH
K
Ideal Track Angle
Ship Speed and
Heading
Flight State
ObservationYp
Uc
G(s)
Ship, Aircraft and Environment
Model
Position Deviation and
LSO Instructions
Flight State
Up
Prediction
Decision
E(k+1)
Constraint
J(x,u,k)
Optimization
H,G(k)
Figure 2: The Overall Structure of Constrained Predictive Pilot Model.
Research on Manual Carrier Landing Task in High Sea Conditions
179
Where the state variable 𝑥 is:
𝑥=
𝑋,𝑌,𝑍,𝜙,𝜃,𝜑,𝑉,𝛼,𝛽,𝑝,𝑞,𝑟
In the state vector, 𝑋,𝑌,𝑍 represent the
displacements of the carrier-based aircraft in the earth
fixed reference frame, 𝜙,𝜃,𝜑 are the three Euler
angles of the aircraft, 𝑉,𝛼,𝛽 denote the airspeed,
angle of attack, and sideslip angle of the aircraft, and
𝑝,𝑞,𝑟 are the three Euler angular velocities of the
aircraft.
The control input u is:
𝑢=
𝛿
,𝛿
,𝛿
,𝛿
In the control vector, 𝛿
represents the elevator
deflection command, 𝛿
is the aileron deflection
command, 𝛿
is the rudder deflection command, and
𝛿
is the throttle command.
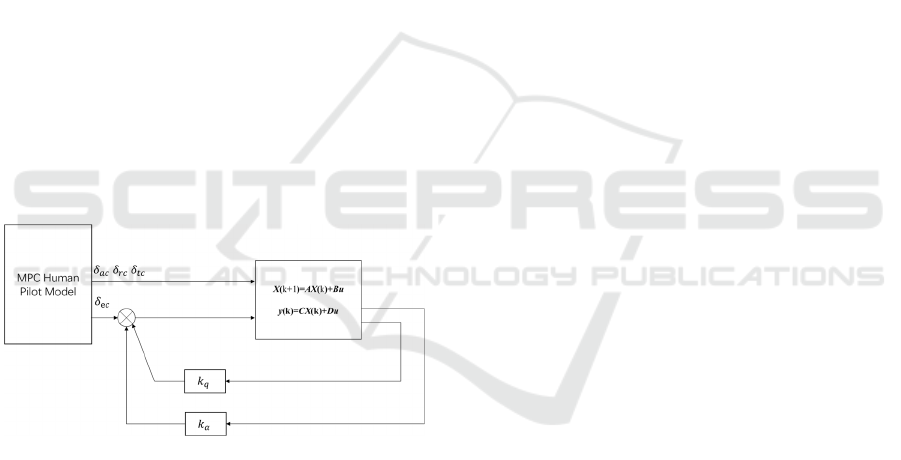
The inner-loop control structure of the aircraft
system is shown in figure 3, aiming to enhance the
flight quality of the system through feedback of 𝛼 and
𝑞 (Chen et al., 2018). Due to the use of pure gain
feedback, the system matrix containing stability
augmentation control can be obtained through linear
transformation. The control model used in this paper
has been somewhat simplified, incorporating the
effects of elevator surfaces and throttle as control rate
constraints into the pilot model. This is done to
analyze the impact of throttle delays and elevator rate
limits on control performance.
Figure 3: Block diagram of the aircraft system.
3.2 Carrier Desire Target Point Model
The position offset of the aircraft is calculated based
on the ideal glide path, with the origin of the ideal
glide path located above the aircraft carrier deck.
Therefore, it is influenced by both the translational
and angular displacements of the ship. In high sea
conditions, the ship will experience more intense
motion, which is a crucial factor affecting landing
safety. Hence, to analyse the impact of high sea
conditions on manual landings, it is necessary to
establish a ship motion model.
The ship motion model in this paper utilizes the
ISSC double parameter spectrum to calculate wave
disturbances, deriving wave interference forces.
Based on the ship's state space response, the time
history curve of ship motion is obtained. The ship
state space is defined as:
𝑥
=
𝐴
𝑥
+𝐵
𝑢
(16)
The state variable 𝑥
represents:
𝑥
=
𝑋,𝑌,𝑍,𝜙
,𝜃
,𝜑
,𝑢
,𝑣
,𝑤
,𝑝
,𝑞
,𝑟
The control input 𝑢
represents the wave
disturbance force. After obtaining the ship motion,
the ideal landing point velocity can be derived, as
shown in the following equation:
𝑢
=𝑉
𝑐𝑜𝑠𝜑
𝑣
=𝑉
sin
(
−𝜓
)
𝑠𝑖𝑛𝜑
𝑤
=𝑤
+𝑉
(
𝑠𝑖𝑛𝜃
−𝑠𝑖𝑛𝜙
𝑐𝑜𝑠𝜃
+𝑐𝑜𝑠𝜃
𝑐𝑜𝑠𝜙
)
(17)
𝑢
、𝑣
、𝑤
are the three axis velocities
of the desired touchdown point in the landing
coordinate system, 𝑉
is the speed of the ship, and
𝜓
is the deck angle.
3.3 Carrier Air Wake Model
In high sea conditions, due to the more intense ship
motion and environmental winds, the disturbance
intensity of the ship's wake will also increase
accordingly. The ship's wake consists of four
components, and in the landing coordinate system,
the three axis ship wake field is as follows(Peng, Jin,
& ASTRONAUTICS, 2000):
𝑢
=𝑢
+𝑢
+𝑢
+𝑢
𝑣
=𝑣
+𝑣
𝑤
=𝑤
+𝑤
+𝑤
+𝑤
(18)
In the equation, 𝑢
、𝑣
、𝑤
represent random
free atmospheric turbulence components. 𝑢
、 𝑤
represent steady components of the ship's wake. 𝑢
、
𝑤
represent periodic components of the ship's wake.
𝑢
、 𝑣
、 𝑤
represent random components of the
ship's wake.
4 SIMULATION
In the preceding sections, models for carrier-based
aircraft, ship motion, environmental wind, and pilot
behaviour were established. This paper focuses on sea
conditions 4, 5, and 6 as the research subjects. The
methods for calculating ship wakes and ship motion are
provided in Section 3. Simulation results are shown in
Figure 4. The results indicate that as the sea condition
level increases, the ship's wake motion increases with
the sea condition level, and the corresponding vertical
SIMULTECH 2025 - 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
180
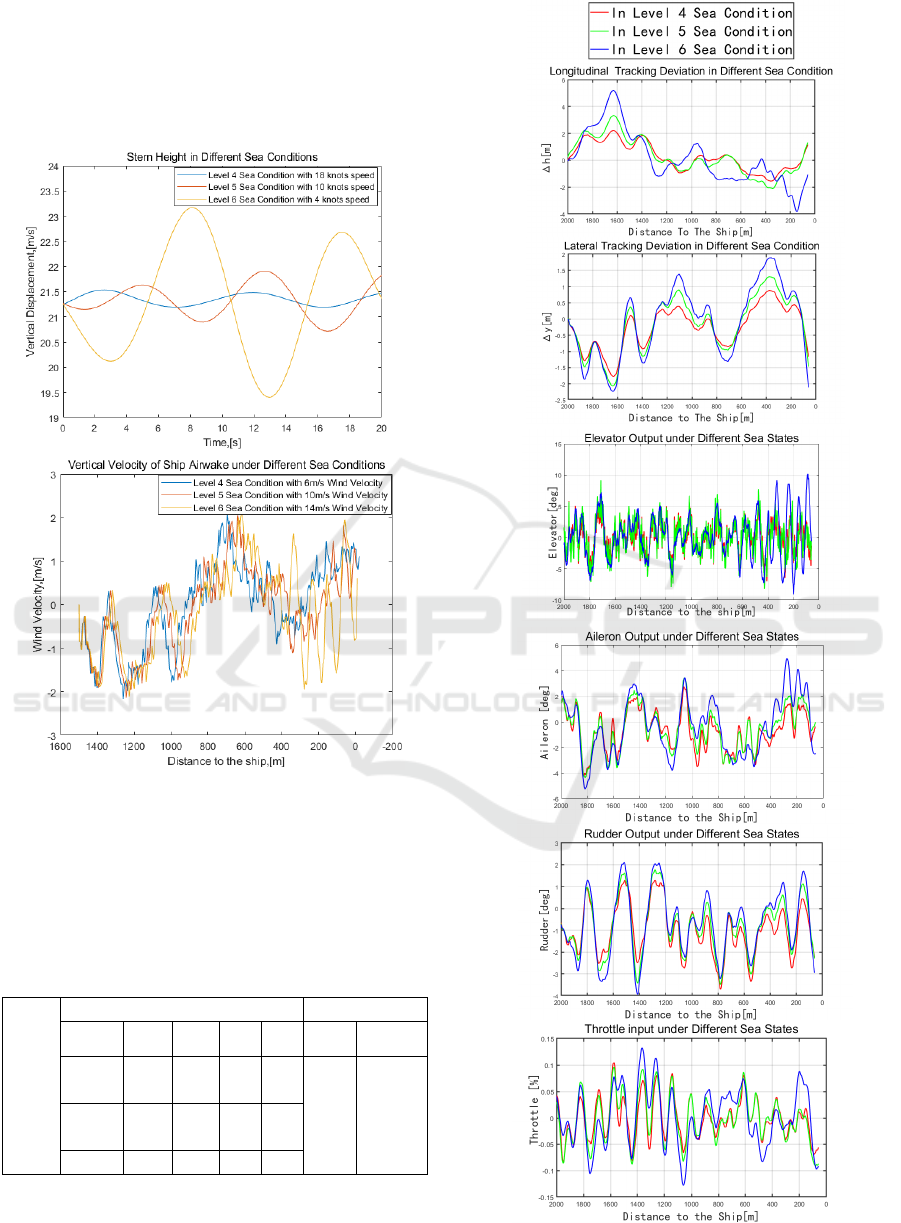
disturbances of the ship's wake flow are enhanced.
Even under sea condition 6 conditions, the ship's wake
motion remains less than ±1.7m, which aligns with the
operational conditions of carrier-based aircraft in the
literature. Therefore, the simulated conditions in this
paper are considered reasonable.
Figure 4: Ship motion and air wake in Level 4-6 sea
condition.
The above environmental conditions serve as
inputs to the simulated study of arrested landings in
high sea conditions. The parameters for the pilot
model are specified in Table 1:
Table 1: Pilot Model Parameters.
Para-
meter
Control Constraints Weight Matrix
Input 𝛿
𝛿
𝛿
𝛿
State Control
Upper
Bound
10.5 25 1 90
𝑄
𝑅
Lower
Bound
-25 -25 -3 75
Vehicle 5 5 0.1 0.1
Conducting simulated arrested landings in high sea
conditions according to the parameters in Table 1,
Figure 5 depicts the behavioural characterization
Figure 5: Pilot Model Output in Level 4,5,6 Sea Conditions.
Research on Manual Carrier Landing Task in High Sea Conditions
181
of pilots in high sea conditions. The simulation results
indicate that the pilot's control magnitude increases in
sea conditions 4, 5, and 6. In sea condition 6, the
ship's wake significantly affects the pilot's landing
operations, showing a trend of oscillation at the ship's
wake, with a notable increase in nonlinear
components in the control command output.
To further conduct a safety analysis of carrier
landings in high sea conditions, repeated simulation
experiments are carried out to study the statistical
characteristics and safety features of arrested landings
in high sea conditions. The repeated simulation
conditions are outlined in Table 2.
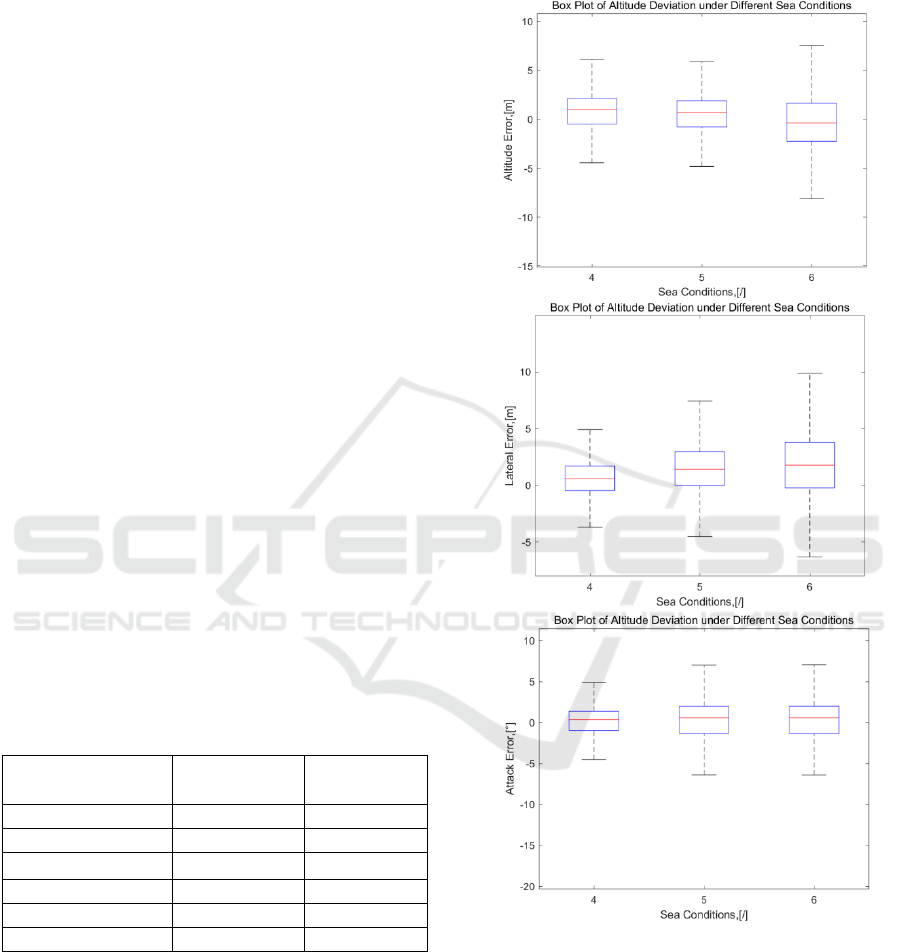
Figure 6 displays box plots of the deviations of
three landing elements in sea conditions 4, 5, and 6.
These elements include altitude deviation, lateral
deviation, and pitch angle deviation, which are the
three main control quantities that pilots need to focus
on during landing tasks. The box plot is a statistical
chart used to display the distribution of data. In box
plot, the data is divided into five parts: the upper
whisker, upper quartile, median, lower quartile, and
lower whisker. The upper whisker represents the
maximum value of the data, while the lower whisker
represents the minimum value. The line in the middle
of the box represents the median (the 50th percentile),
and there are horizontal lines at the top and bottom of
the box representing the upper quartile and lower
quartile, respectively. Box plots also include the
display of outliers, which are values that are typically
far from most data points. Box plots provide a clear
visualization of the data's spread, median, quartiles,
and the distribution of outliers.
Table 2: Simulation Conditions for High Sea condition
Deck Landing.
Name Work Condition Unit
Sea conditions 4,5,6 /
Wind of deck 25 kn
Average wind speed 6,8,14 m/s
Aircraft speed 62 m/s
𝛾
-4 °
Number of Repetitions 45 /
The results indicate that as the sea condition level
increases, the longitudinal deviation in arrested
landings gradually increases. The variance of lateral
deviation remains approximately constant, but the
distribution leans more towards the right side of the
ship's wake. This is because pilots have lower
tolerance for deviations in the longitudinal channel,
prioritizing corrections in that direction. This,
coupled with the longitudinal-lateral coupling, affects
corrections towards the centre, resulting in
insufficient correction for lateral deviations induced
by carrier motion.
Figure 6: Box plot of landing three elements' deviations in
sea condition 4-6.
Figure 7 shows the hook-to-ramp (The vertical
distance between the hook and the ramp when the
aircraft passes through the ramp) clearance of aircraft
passing over the ship's wake in sea conditions 4, 5,
and 6. The hook-to-ramp clearance represents the
safety margin during arrested landings, typically
requiring at least a 4-meter hook-to-ramp distance for
SIMULTECH 2025 - 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
182

safety. It can be observed that in sea condition 4,
manual arrested landings can ensure a hook-to-ramp
distance of at least 4 meters, descending from a
position slightly above the ideal trajectory towards
the ship's wake, as described in the literature. In sea
condition 5, the dispersion of hook-to-ramp distances
increases, with a tendency to cross the 4-meter safety
line. In sea condition 6, pilots struggle to maintain a
safe margin of 4 meters for the hook-to-ramp distance,
posing significant safety risks during arrested
landings.
Figure 7: Hook-to-ramp clearance of carrier-based aircraft
in sea conditions 4-6.
5 CONCLUSIONS
This article addresses the modelling issues of carrier
landings task in high sea conditions by establishing
models that include a carrier-based aircraft model,
deck motion model, carrier air wake model, and pilot
model, taking into account the pilot's perception and
decision-making processes. The main conclusions are
as follows:
1. The pilot models based on MPC method under
optimal assumptions, representing a MIMO pilot
model that controls based on the overall state of
the human-machine system. Compared to the
LQR pilot model, the MPC pilot model can
describe the flight techniques where pilots
control based on the trend changes of the ship's
movement and has the structural advantage of
explicitly handling constraints.
2. Simulation results indicate that in high sea
conditions, the longitudinal deviation during
manual arrested landings increases. Due to pilots'
low tolerance for longitudinal deviations and
their high correction priority, corrections for
lateral deviations induced by ship motion are
insufficient, leading to an overall right leaning
lateral deviation. The simulations also
demonstrate that as sea condition levels rise, the
dispersion of hook-to-ramp distances increases
with a tendency to exceed the 4-meter safety line,
posing significant safety risks. This confirms that
the model proposed in this study can be used for
safety analysis of manual carrier landing task in
complex environments.
REFERENCES
Baron, S., Kleinman, D. L., & Levison, W. H. (1970). An
optimal control model of human response part II:
Prediction of human performance in a complex task.
Automatica, 6(3), 371-383. doi:https://doi.org/10.1016/
0005-1098(70)90052-X
Brictson, C. A. (1966). Measures of pilot performance:
Comparative analysis of day and night carrier
recoveries: University of Southern California.
Brutch, S., & Moncayo, H. (2024). Machine Learning
Approach to Estimation of Human-Pilot Model
Parameters. Paper presented at the AIAA SCITECH
2024 Forum.
Chen, C., Tan, W., Qu, X., & Li, H. (2018). A Fuzzy
Human Pilot Model of Longitudinal Control for a
Carrier Landing Task. IEEE Transactions on
Aerospace and Electronic Systems, 54(1), 453-466.
doi:10.1109/TAES.2017.2760779
Davidson, J. B., & Schmidt, D. K. (1992). Modified optimal
control pilot model for compute r-aided design and
analysis. Retrieved from
Haitao, Y., & Yan, L. (2021, 19-22 Nov. 2021). Research
on Key Technologies of Carrier-Based Aircraft
Landing. Paper presented at the 2021 6th International
Conference on Robotics and Automation Engineering
(ICRAE).
Hess, R. A. (1980). Structural Model of the Adaptive
Human Pilot. Journal of Guidance and Control, 3(5),
416-423. doi:10.2514/3.56015
Hess, R. A. (2006). Simplified approach for modelling pilot
pursuit control behaviour in multi-loop flight control
tasks. Proceedings of the Institution of Mechanical
Engineers, Part G: Journal of Aerospace Engineering,
220(2), 85-102.
Hess, R. A. (2019). Analysis of the Aircraft Carrier Landing
Task, Pilot + Augmentation/Automation. IFAC-
PapersOnLine, 51(34), 359-365. doi:https://doi.org/10.
1016/j.ifacol.2019.01.017
Hess, R. A. J. P. o. t. I. o. M. E., Part G: Journal of
Aerospace Engineering. (2008). Obtaining multi-loop
pursuit-control pilot models from computer simulation.
222(2), 189-199.
Jakimovska, N., Pool, D. M., van Paassen, M. M., &
Mulder, M. (2023). Using the Hess Adaptive Pilot
Model for Modeling Human Operator's Control
Adaptations in Pursuit Tracking. Paper presented at the
AIAA SCITECH 2023 Forum.
Research on Manual Carrier Landing Task in High Sea Conditions
183

Kleinman, D. L., Baron, S., & Levison, W. H. (1970). An
optimal control model of human response part I: Theory
and validation. Automatica, 6(3), 357-369.
doi:https://doi.org/10.1016/0005-1098(70)90051-8
Lone, M. M., & Cooke, A. K. J. P. o. t. I. o. M. E., Part G:
Journal of aerospace engineering. (2013). Pilot-model-
in-the-loop simulation environment to study large
aircraft dynamics. 227(3), 555-568.
Lone, M. M., Ruseno, N., & Cooke, A. K. (2012). Towards
understanding effects of non-linear flight control
system elements on inexperienced pilots. The
Aeronautical Journal (1968), 116(1185), 1201-1206.
doi:10.1017/S0001924000007569
McRuer, D., Schmidt, D. K. J. J. o. G., Control,, &
Dynamics. (1990). Pilot-vehicle analysis of multiaxis
tasks. 13(2), 348-355.
McRuer, D. T., & Jex, H. R. (1967). A Review of Quasi-
Linear Pilot Models. IEEE Transactions on Human
Factors in Electronics, HFE-8(3), 231-249.
doi:10.1109/THFE.1967.234304
Myers, T. T., Johnston, D. E., & McRuer, D. J. N. C.-.,
June. (1982). Space shuttle flying qualities and flight
control system assessment study.
Peng, J., Jin, C.-j. J. J.-B. U. O. A., & ASTRONAUTICS.
(2000). Research on the numerical simulation of
aircraft carrier air wake. 26(3; ISSU 103), 340-343.
Roig, R. W. (1962). A comparison between human operator
and optimum linear controller RMS-error performance.
IRE Transactions on human factors in electronics(1),
18-21.
SCHMIDT, D. (1988). Modeling human perception and
estimation of kinematic responses during aircraft
landing. Paper presented at the Guidance, Navigation
and Control Conference.
Sweger, J. F. (2003). Design specifications development for
unmanned aircraft carrier landings: A simulation
approach: US Naval Academy.
Wang, L., Jiang, X., Zhang, Z., & Wen, Z. (2022). Lateral
automatic landing guidance law based on risk-state
model predictive control. ISA Transactions, 128, 611-
623. doi:https://doi.org/10.1016/j.isatra.2021.11.031
Wierenga, R. D. J. I. T. o. M.-M. S. (1969). An evaluation
of a pilot model based on Kalman filtering and optimal
control. 10(4), 108-117.
Xu, S. T., Tan, W. Q., Efremov, A. V., Sun, L. G., & Qu,
X. J. (2017). Review of control models for human pilot
behavior. Annual Reviews in Control, 44, 274-291.
doi:10.1016/j.arcontrol.2017.09.009.
SIMULTECH 2025 - 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
184
