
ADORe: Unified Modular Framework for Vehicle and
Infrastructure-Based System Level Automation
Mikkel Skov Maarssoe
a
, Sanath Konthala
b
, Marko Mizdrak
c
, Giovanni Lucente
d
, Matthias
Nichting
e
, Thomas Lobig
f
and Andrew Koerner
g
Institute of Transportation Systems, German Aerospace Center (DLR), Lilienthalplatz 7, 38108 Braunschweig, Germany
Keywords:
Automated Driving, Cooperative Automated Driving, Research Framework, Modular Software, Open-Source,
System-Level Automation.
Abstract:
Recent advancements in automated driving have primarily focused on achieving autonomy within individual
vehicles. However, a broader paradigm shift is emerging that leverages both vehicle-level autonomy and col-
laboration with other road users and infrastructure to optimize traffic flow and enhance safety. This paper intro-
duces ADORe
®
(Automated Driving Open Research), an open-source Automated Driving System developed
by the German Aerospace Center (DLR). ADORe adopts a modular, system-level approach, enabling seamless
integration between Single-Agent Automated Driving for local autonomy and Multi-Agent Autonomous Driv-
ing for infrastructure-assisted decision-making. By utilizing vehicle-to-infrastructure (V2X) communication,
ADORe facilitates coordinated multi-agent planning, dynamic route optimization, and improved situational
awareness through shared data. The framework supports flexible testing via simulation tools like CARLA and
SUMO, alongside deployment on research vehicles equipped with advanced sensors and teleoperation capa-
bilities. Successful demonstrations in research projects like the German national Gaia-X4ROMS and MAD
Urban validate ADORe’s capability to bridge the gap between isolated autonomous driving and cooperative
traffic systems. This collaborative approach highlights the potential of automated driving systems as a corner-
stone of intelligent transportation systems, advancing safety, efficiency, and interoperability.
1 INTRODUCTION
Recent progress in automated driving has demon-
strated remarkable advancements in perception,
decision-making, and control, bringing self-driving
vehicles closer to widespread deployment. However,
many current approaches still frame the challenge as
merely replacing human drivers inside the vehicles by
an artificial intelligence. This perspective alone ne-
glects the broader potential of automated driving as
a system-level innovation. Communication technolo-
gies, such as vehicle-to-vehicle (V2V) and vehicle-to-
infrastructure (V2I) connectivity, enable more com-
a
https://orcid.org/0009-0003-9999-8711
b
https://orcid.org/0009-0008-4096-7685
c
https://orcid.org/0009-0004-3931-2842
d
https://orcid.org/0000-0002-7844-853X
e
https://orcid.org/0000-0002-2484-4203
f
https://orcid.org/0009-0009-4158-5184
g
https://orcid.org/0009-0000-3837-3433
prehensive approaches to automated driving. By fa-
cilitating real-time information exchange between ve-
hicles and infrastructure, these technologies allow for
multi-agent decision-making that transcends the limi-
tations of local ego-vehicle-based optimization. Such
systems can promote collaboration, where vehicles
collectively negotiate traffic flow, adapt to dynamic
conditions, and coordinate their movement with in-
frastructure like traffic lights and edge computers. A
taxonomy for the different possible classes of co-
operation is provided in SAE J3216 (SAE, 2024b),
distinguishing specifically ’status-sharing’, ’intent-
sharing’, ’agreement-seeking’ and ’prescriptive co-
operation’. The paradigm shift redefines automated
driving not merely as individual autonomy but as a
cornerstone of intelligent, cooperative mobility sys-
tems, paving the way for safer, more efficient, and
seamlessly integrated transportation networks.
Automated Driving Open Research (ADORe
®
)
is the German Aerospace Center’s (DLR) open-
source Automated Driving System (ADS). Unlike
Maarssoe, M. S., Konthala, S., Mizdrak, M., Lucente, G., Nichting, M., Lobig, T. and Koerner, A.
ADORe: Unified Modular Framework for Vehicle and Infrastructure-Based System Level Automation.
DOI: 10.5220/0013405200003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 571-581
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
571

Figure 1: DLRs research CAVs, NGC-FASCar, ViewCar2,
& FASCarE.
many ADS that prioritize ego-vehicle performance,
ADORe adopts a system-level approach, facilitating
coordinated decision-making among Cooperative Au-
tomated Vehicles (CAV) and infrastructure systems.
Its modular and containerized framework supports
seamless integration and easy scalability, enabling ve-
hicles to operate both independently and collabora-
tively. ADORe’s dynamic design allows CAVs to
continuously communicate with traffic lights, other
vehicles, and infrastructure components facilitating
the optimization of traffic flow and the enhancement
of safety and efficiency. It enables adapting to vary-
ing operating domains by seamlessly switching be-
tween local autonomy, infrastructure-based support
and decision-making, and human-assisted remote op-
eration. By bridging the gap between isolated auton-
omy and cooperative traffic management, ADORe al-
lows researchers to work with a system-wide perspec-
tive of automated driving. As such tool, its goal is to
be used for prototypic research testing, and not for full
SAE Level 4 and above driving (SAE, 2024a).
2 STATE OF THE ART
The field of Automated Driving Systems (ADS) has
seen a surge in open-source tools in recent years. Due
to the complexity of the driving task, there is no per-
fect tool that fits all needs. Many of these tools are
focused on a particular level of abstraction like traffic
design, sensor processing, driving policy, and others.
Having multiple integrated tools that leverage the
advantages of more than one approach is an obvi-
ous path for ADS technology development, making
the journey from idea to proof-of-concept prototype
faster and easier.
There are already several existing open-source au-
tomation stacks that have been accessible for years
and have matured into well-developed software. Au-
toware (Aut, 2023) is an open-source highly fea-
tured Automated Driving Stack based on ROS2, de-
veloped at Nagoya University. It is well-documented
and maintained. Another automation stack is Apollo
(Apo, 2024), based on the open-source middleware
Apollo Cyber RT, developed by Baidu. RoboCar
(Testouri et al., 2024) is another recent modular and
cost-effective Automated Driving Stack. Alterna-
tively, there are Automated Driving Stacks that are
designed around research into Cooperative Driving
like OpenCDA that focus on providing an environ-
ment for testing cooperative driving algorithms (Xu
et al., 2021). For a comprehensive overview, we refer
the reader to the survey papers (Tang et al., 2023), (Li
et al., 2023).
Alongside these automation stacks, domain-
specific simulation and modeling tools have been de-
veloped to address particular ADS application re-
quirements. SUMO (Behrisch et al., 2011) is used for
traffic flow simulation (supporting V2X communica-
tion and linking to network simulation tools like ns-3
(L
¨
ucken et al., 2021)), CARLA (Dosovitskiy et al.,
2017) for vehicle dynamics simulation and different
scenarios testing, and CommonRoad (Althoff et al.,
2017), which focuses on planning policies. Compre-
hensive surveys on available tools (Li et al., 2023)
(Tong et al., 2020) emphasize that the need for more
integration of ADS tools, such as with SUMO for traf-
fic simulation and with CARLA for more realistic ve-
hicle dynamics, is critical.
3 METHODS
3.1 Architecture
ADORe is a modular system designed to be easily
adaptable to other frameworks and various hardware
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
572
components. To achieve this, ADORe is conceptual-
ized as two different categories of modules each con-
taining its own set of nodes, the interface modules,
and the ADORe Core. The ADORe interface mod-
ules are all hardware or companion software specific,
meaning specifically designed for the DLR-provided
hardware and software, or other companion software
like the CARLA Simulator. The ADORe Core con-
tains all modules for route planning, trajectory plan-
ning, and control used to achieve automated driv-
ing, and are specifically designed to avoid hardware
or companion software-specific implementations, and
are therefore adaptable to other frameworks as long as
they fulfill the message and topic requirements of the
ADORe Core ROS2 nodes. The ADORe Core can
be further categorized into two distinct sets of mod-
ules, as the planning behavior differs between them:
on the one hand, the Single-Agent Automated Driving
(SAAD) modules, and on the other hand, the Multi-
Agent Automated Driving (MAAD) modules. A sim-
plified overview of all the modules can be seen in Fig.
2.
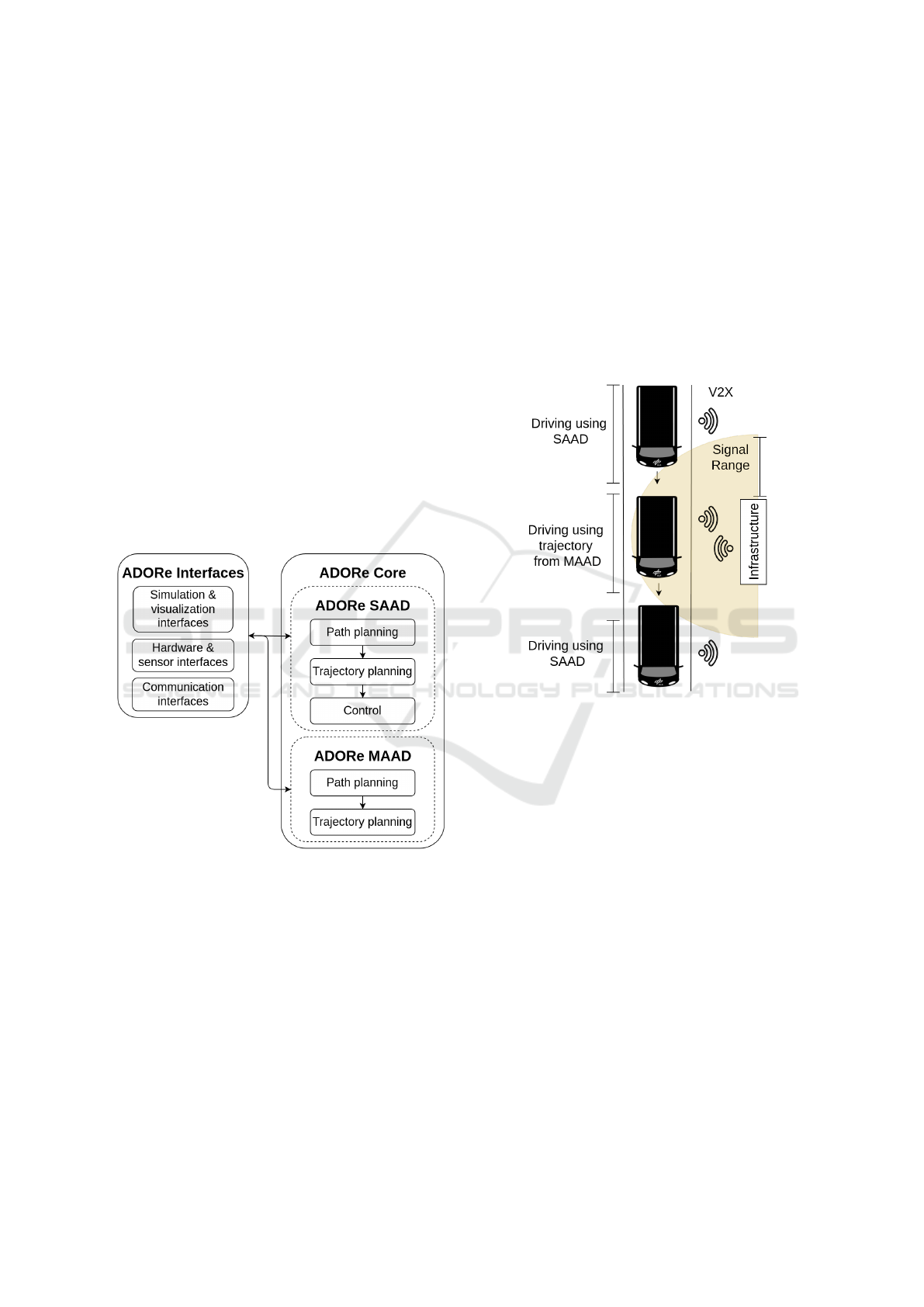
Figure 2: ADORes main categories of modules, ADORe in-
terface and ADORe core. The ADORe Core is further sepa-
rated into modules used for single-agent automated driving
(SAAD) and multi-agent automated driving (MAAD).
What distinguishes ADORe from many other al-
ternative ADS is that it is designed not only to run on
local hardware in a single ego vehicle using SAAD,
but also to perform planning for groups of CAVs when
operating on remote hardware, such as road-based lo-
cal infrastructure communicating through V2X with
the individual vehicles. ADORe is designed around
this collaborative relationship between SAAD and
MAAD, as depicted in Fig. 3. ADORe enables a CAV
running ADORe SAAD to drive autonomously on lo-
cal in-vehicle hardware when out of range of cooper-
ative infrastructure, yet supports switching to receiv-
ing its trajectories, control or maneuver advisories or
commands from ADORe MAAD through V2X when-
ever available. The benefit of using infrastructure-
provided commands and advisories is that they are
based on local infrastructure sensors tailored to the
related terrain and therefore enhancing safety, while
they can also be influenced by traffic management
systems focusing on the optimized throughput and
efficiency of all traffic participants in the local area
(Schindler et al., 2023).
Figure 3: A scenario showing a vehicle driving along a
route, running ADORe SAAD for autonomous driving,
when the car is within range of the infrastructure running
ADORe MAAD, the planning switches to be handled on
the infrastructure and gets switched back again once the ve-
hicle is out of range.
3.2 Integrated Build System &
Development Environment
ADORe features a container-based development en-
vironment built on Docker (Doc, 2024). This sys-
tem serves multiple roles, acting as a development
environment with debugging and development tools
preinstalled, as well as a runtime environment with
all necessary dependencies. It includes a virtual dis-
play for executing commands and programs in con-
texts without standard input or output, enabling pro-
grams that require a display to run in a headless en-
vironment (no standard input and standard output),
such as an automated build server. Known as the
ADORe CLI, this build system leverages GNU Make
non-conventionally as a command runner and oper-
ates within a containerized Docker context, support-
ADORe: Unified Modular Framework for Vehicle and Infrastructure-Based System Level Automation
573

ing both x86 and ARM64 architectures. The ADORe
CLI uses Docker ”volumes” to link the host filesys-
tem to the ADORe source code directory, allow-
ing system requirements and dependencies to be dy-
namically added by individual components, modules,
or nodes. Additionally, it integrates ccache, a tool
that caches C++ compilations to reduce repeat com-
pile times, enhancing development efficiency. The
ADORe CLI comes preinstalled with ROS 2 Jazzy
and Ubuntu 24.04, both of which are configurable,
along with a collection of common ROS development
tools, network debugging tools, and other command-
line tools. This system supports not only a standard-
ized development environment but also facilitates au-
tomation for automated building and testing.
3.3 Simulation & Visualization
3.3.1 Visualization
ADORe allows visualizing with all common ROS2
visualization tools like RViz (RVi, 2024), Foxglove
(Fox, 2024), and Lichtblick (lic, 2024).
This is done via a visualization node which is re-
sponsible for subscribing to all relevant messages and
converting them to visualizable messages (primarily
Marker Arrays). Including:
• Ego vehicle
• Other detected traffic participants
• Road/lane boundaries
• Planned trajectories
• Goal point
• Route to goal
• Satellite image of the map area
• Driven path
Figure 4: Example of ADORe visualization in Lichtblick.
3.3.2 Simulation
For testing in simple cases, ADORe provides a ROS2
node for simulating a vehicle with a simple vehicle
model which utilizes tire forces based on a simplified
dynamic bicycle model involving front and rear tire
stiffness, considers the effects of yaw rate, lateral ve-
locity, and steering angle, accounts for rotational iner-
tia and lateral tire forces through friction and stiffness
parameters, implements a simplified dynamic force
balance to compute lateral acceleration and yaw rate
changes (Rajamani, 2011). Many instances of the
Simulated Vehicle node can be spawned to test multi-
vehicle systems. The Simulated Vehicle node also
has several additional features, such as manual driv-
ing through a teleoperations panel, the ability to tog-
gle between manual and autonomous driving, and op-
tional generated/synthetic input noise.
3.3.3 CARLA Simulator Interface
The CARLA Simulator (Dosovitskiy et al., 2017) is
a popular open-source simulation tool for automated
driving with a realistic graphical output. ADORe
has an interface to CARLA extending its applicabil-
ity in research. For example, the interface facilitates
the simulation and testing of the ADORe vehicle au-
tomation using the precise vehicle models provided
by CARLA and it supports the execution of complex
driving scenarios. Additionally, the interface enables
the evaluation of perception models by leveraging
CARLA’s realistic graphical environment in conjunc-
tion with the ADORe automation framework. The in-
terface ensures bidirectional data exchange by con-
verting information into the appropriate formats for
both simulators. The CARLA Simulator is provided
in a containerized way by the CARLA team allowing
a straightforward deployment and execution together
with the ADORe framework.
3.3.4 SUMO Interface
The SUMO (Simulation of Urban Mobility) (Al-
varez Lopez et al., 2024) tool is a widely used open-
source microscopic traffic simulation tool. It is ca-
pable of supporting the simulation and analysis of
intermodal traffic flows within the context of large-
scale networks. ADORe provides an interface to
SUMO. This enables the utilization of SUMO for the
lightweight simulation of vehicles and traffic flows
in the vicinity of a vehicle that is simulated with
ADORe. Furthermore, it permits the operation of an
automated vehicle within a SUMO simulation via the
ADORe automation. This allows for the easy assess-
ment of the impact of an automated vehicle operated
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
574
by ADORe on the surrounding traffic flow. To achieve
the aforementioned functionality, the ADORe SUMO
bridge synchronizes both the ADORe and SUMO
simulations and transfers the information of all sta-
tuses of the traffic participants in the simulations. The
data exchange is based on libsumo, which is the C++
interface of SUMO. The direction of data transfer
for each participant is determined based on whether
a given traffic participant is simulated in SUMO or
ADORe. In each time step, the vehicle status is trans-
ferred and translated.
3.4 Hardware & Sensors
3.4.1 Research Vehicles
ADORe is deployed to all three of DLR’s research
vehicles seen in Fig. 1. There is the NGC-FASCar,
a Mercedes EQV equipped with an acceleration and
steering interface solution developed by Paravan.
Then there is also the FASCarE, a Volkswagen eGolf,
and the ViewCar2, a Volkswagen Passat GTE. Both
cars are controlled using enhanced CAN-bus inter-
faces. ADORe’s trajectory tracker sends commands
to a vendor-specific low-level interface to control the
actual vehicle. While the vendor-specific interface
part cannot be open-sourced, the trajectory tracker’s
output is simple enough to be adopted for any kind
of vehicle interface. All DLR’s research vehicles are
outfitted with LIDARs and cameras as well as GNNS
and a high-precision IMU. The research vehicles have
a DLR-internal sensor perception and fusion solution
which is also based on ROS, so the interface with
ADORe is based on ROS2 messages to provide ve-
hicle state information and surrounding object data.
Thus the interface is generic and modular and can be
adapted to a wide range of automation capable vehi-
cles.
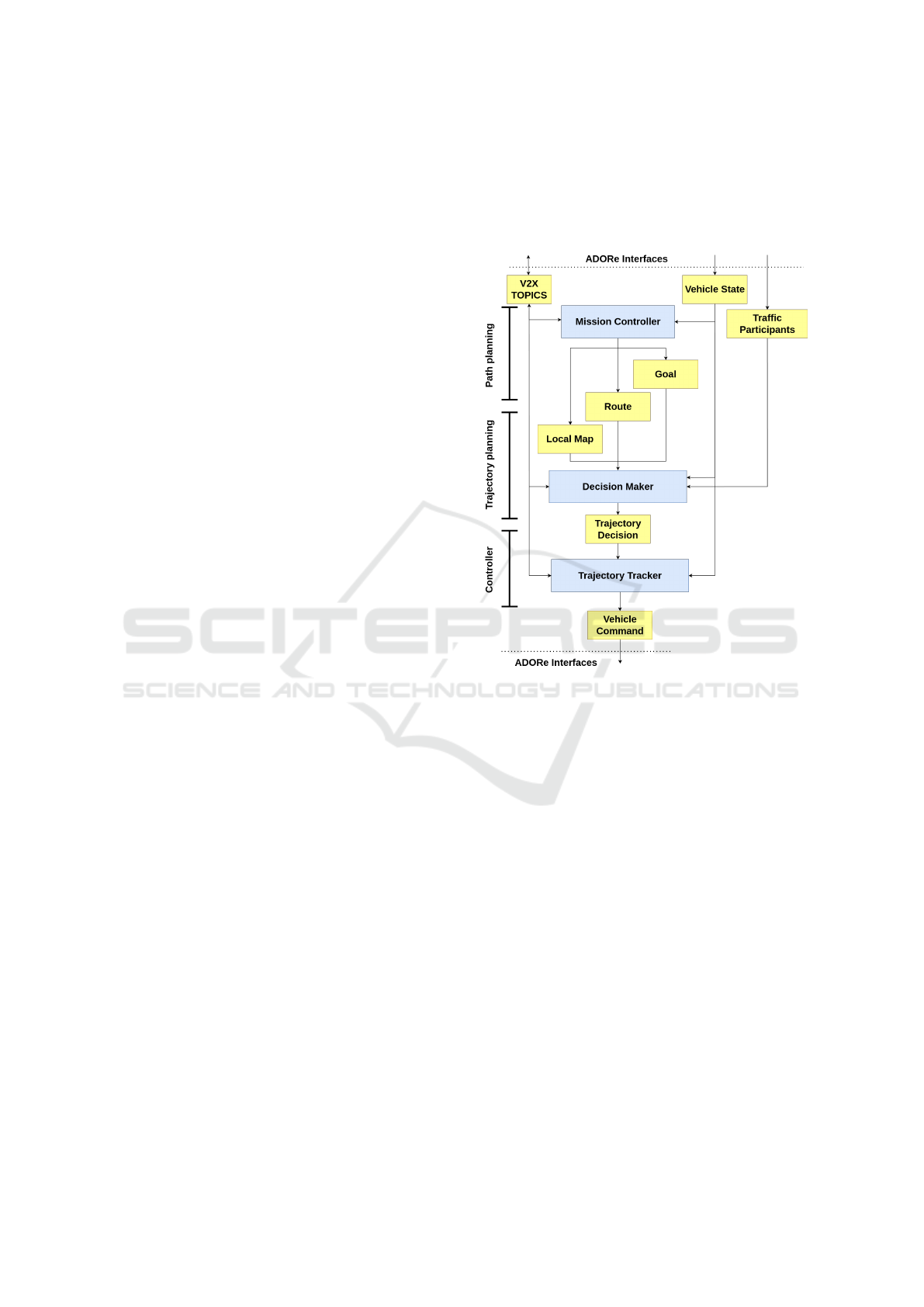
3.5 Single-Agent Automated Driving
The ADORe SAAD is responsible for calculating
routes, trajectories, decisions, V2X, and the actual
vehicle command to drive the vehicle to fulfill its
goals. Fig. 5 shows the different ROS2 nodes and
topics communicating with each other and gives an
overview of the flow of execution. ADORe SAAD
receives through its interfaces the current ego vehi-
cle state, other traffic participants, and a variety of
V2X topics. Using these topics, ADORe SAAD first
sends the necessary information to the mission con-
troller, which handles everything related to naviga-
tion. Afterwards, the decision maker is used to deter-
mine which planner is to be used. Different planners
exist for different purposes, which generate appropri-
ate trajectories, see below for details. The planned
trajectories can also be published using V2X. Lastly,
ADORe SAAD uses the trajectory tracker to calculate
low-level vehicle commands.
Figure 5: The ADORe SAAD nodes and topics overview,
yellow boxes being ROS2 topics & messages, and blue
boxes are nodes.
3.5.1 Mission Controller
The Mission Controller is responsible for the vehi-
cle’s high-level navigation, this includes map loading,
keeping track of goals, and route planning. The Mis-
sion Controller keeps track of a queue of goals. This
enables, for example, multiple pick up and drop-offs
at different locations. When many destinations should
be reached, many successive routes can be planned.
Two formats of HD maps are supported.
Road2Simulation maps and OpenDRIVE maps.
When the high definition (HD) map is loaded from
a file, a lane graph weighted by the lengths of the
lanes is created and Dijkstra is used to find the short-
est path to the goal along the drivable lanes. The Mis-
sion Controller keeps track of the progress along this
route and adjusts accordingly, recalculating when the
vehicle deviates too far from it.
A local cut-out of the larger map, the route, and
the goal are sent onward to other parts of the automa-
tion.
ADORe: Unified Modular Framework for Vehicle and Infrastructure-Based System Level Automation
575

3.5.2 Decision Maker & Trajectory Planner
The Decision Maker is the core component of
ADORe SAAD, responsible for managing the high-
level decision-making required for seamless and safe
automated vehicle operation. It operates through a hi-
erarchical state machine that dynamically determines
the type of trajectory and action executed by ADORe
SAAD. At its highest level of abstraction, the De-
cision Maker can transition between currently seven
prioritized states:
• Emergency Stop: Halts the vehicle as quickly as
possible.
• Minimum Risk Maneuver: Strategically brings
the vehicle to a stationary position safely.
• Requesting Assistance: Signals for human inter-
vention when the vehicle encounters a situation
requiring external input (see Sec. 4.1.1).
• Remote Operations: Allows human operators
to guide the vehicle remotely during challenging
scenarios. (see Sec. 4.1.1).
• Safety Corridor: Engages when a safety corridor
message is received, such as one issued by emer-
gency vehicles, instructing the vehicle to clear a
path (see Sec. 4.1.2).
• Standstill: State for stopping or remaining sta-
tionary.
• Follow Route: Creates a trajectory following the
lane center of a route provided by the mission con-
troller.
• Follow Reference: Follows a reference trajec-
tory provided from elsewhere, typically ADORe
MAAD.
The transition into and behavior within each state
depends on the data received through the topics and
interfaces described in Sec. 3.5. For instance, if local-
ization is lost, the Emergency stop state is triggered.
Alternatively, when a reference trajectory is available,
the Follow reference state is prioritized to ensure op-
timal trajectory execution.
The Decision Maker and Trajectory Planner work
in tandem to enable seamless transitions between lo-
cal automation, infrastructure-assisted driving, and
remote operations.
The Decision Maker determines the vehicle’s cur-
rent operational state and generates the appropriate
reference inputs for the Trajectory Planner. Depend-
ing on the state, the reference can take different forms:
a reference path to the goal, safety corridor lanes, or a
multi-agent-based reference trajectory from MAAD.
For example, when providing a reference path to the
goal, the Decision Maker also computes a reference
velocity using the Intelligent Driver Model (IDM)
(Malinauskas, 2014), ensuring safe minimum dis-
tance and time headway from other vehicles. These
references are then passed to the Trajectory Planner.
The Trajectory Planner uses these inputs, along
with additional information such as vehicle dynamics
and constraints, to generate a feasible and safe tra-
jectory. It employs a nonlinear constraints optimizer,
named OptiNLC (Opt, 2024), an OSQP-based opti-
mization solver (Stellato et al., 2020) library devel-
oped by DLR, to solve the optimal control problem.
The optimization cost function is designed to ensure
the vehicle follows the center of the lane smoothly
while adhering to kinematic and dynamic constraints.
It prioritizes passenger comfort by minimizing lateral
deviation, aligning the vehicle’s heading with the ref-
erence path, and promoting smooth, efficient motion.
By optimizing control inputs at each point within
the planning horizon, the algorithm iteratively solves
for the trajectory that satisfies convergence criteria.
While the current implementation focuses on longi-
tudinal motion planning guided by IDM, future de-
velopments aim to include more sophisticated lateral
planning and lane-changing capabilities, further en-
hancing the system’s robustness and adaptability.
3.5.3 Trajectory Tracker
To ensure that the automated vehicle follows the
planned trajectory, we have developed multiple con-
trollers to provide flexibility. These include a PID
controller, a Model Predictive Controller (MPC), and
an iterative Linear Quadratic Regulator (iLQR).
The PID controller computes control commands
by penalizing errors in position, velocity, and head-
ing relative to a point on the reference trajectory, with
separate PID gains for each error type. Anti-windup
mechanisms prevent integral terms from growing un-
controllably, while additional terms for comfort con-
straints (e.g., limits on steering velocity and accelera-
tion jerk) ensure smooth transitions.
The Model Predictive Controller improves upon
this by considering not just a single reference point on
the planned trajectory but a prediction horizon. This
also uses OptiNLC, the same OSQP-based optimiza-
tion solver library as is used in trajectory planning.
This approach results in smoother and more comfort-
able control outputs. The MPC’s cost function incor-
porates various factors to optimize trajectory track-
ing, including minimizing lateral deviation, penaliz-
ing steering angle velocity, and reducing longitudinal
jerk.
The iLQR controller also works in an MPC-like
way. At each time step, it calculates a control se-
quence over a longer horizon while only executing
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
576
the first part. It operates by iteratively refining an ini-
tial control sequence through forward and backward
passes, leveraging linear approximations of system
dynamics and quadratic approximations of the cost
function. In the forward pass, the algorithm simu-
lates the system’s response to the current control se-
quence using nonlinear dynamics, generating a state
trajectory. The backward pass linearizes the dynamics
around this trajectory and applies dynamic program-
ming to compute a time-varying feedback control law
that minimizes a local quadratic approximation of the
cost-to-go.
This implementation of iLQR incorporates a cost
function that penalizes deviations in longitudinal and
lateral position, velocity, and heading while adding
regularization terms for jerk and steering rate to en-
sure smooth and feasible motion. The dynamics
are represented using discretized linearized matrices,
which model how states and controls influence the
system over time. Cost derivatives are computed to
approximate the sensitivity of the cost function, en-
abling precise control updates. A line search mech-
anism ensures stability by scaling control updates
while warm-starting from previously computed tra-
jectories accelerates convergence.
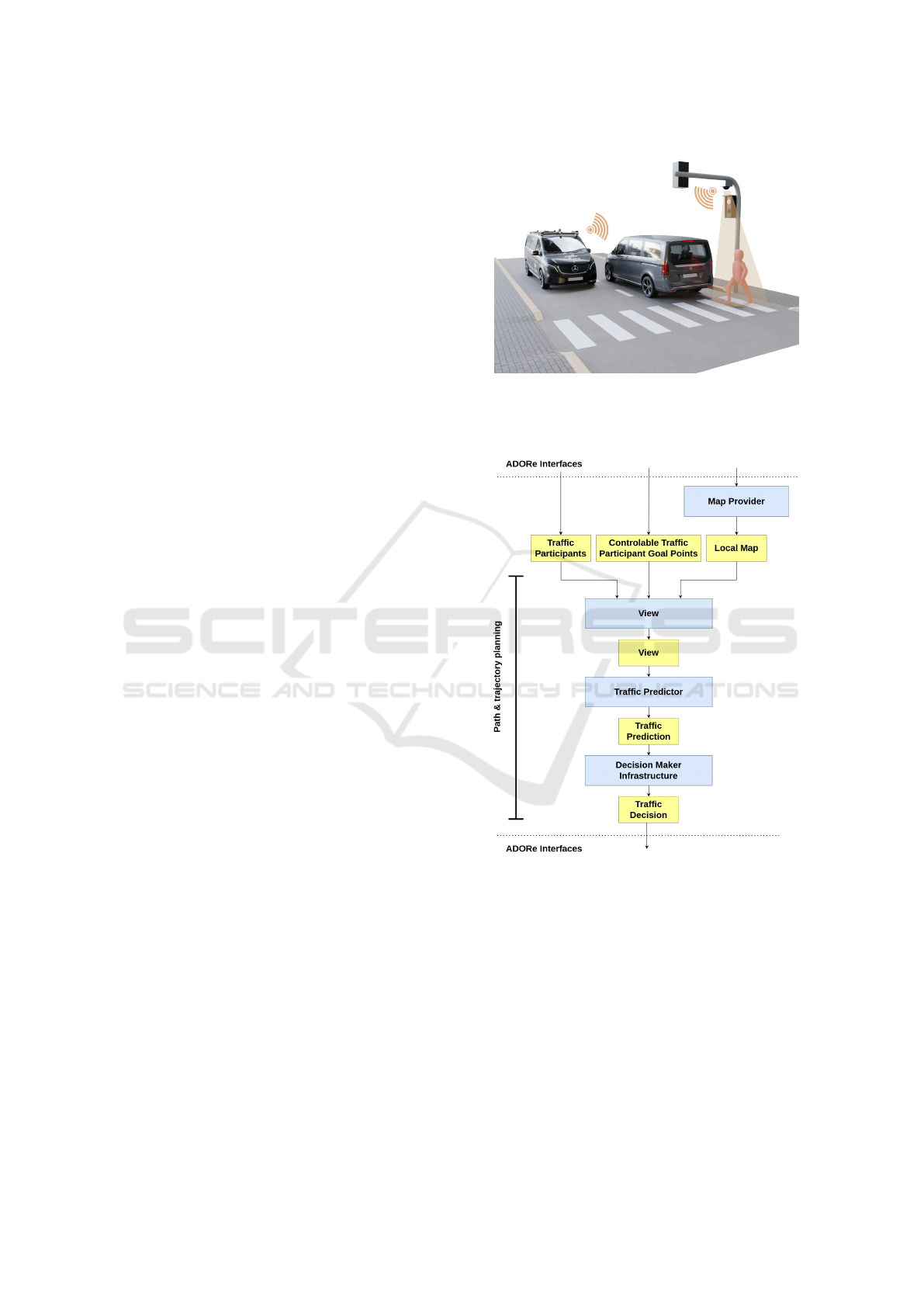
3.6 Multi-Agent Autonomous Driving
ADORe MAAD is designed for working on infras-
tructure or surrounding hardware that remotely com-
municates with ADORe SAAD on one or multiple ve-
hicles. The idea of communication with infrastructure
for planning for multiple CAVs gains multiple advan-
tages. First, each vehicle gains access to information
not achievable by a single vehicle like in the scenario
seen in Fig. 6. In Fig. 6 the DLR CAV is driving along
a road, and due to the viewing angle the car is unable
to see the person running toward the CAV’s driving
direction. However, the person is within the view-
ing angle of the infrastructure on the traffic light, and
through communication the CAV can gain an under-
standing of traffic that not even humans can achieve.
Secondly, since ADORe MAAD is designed for
planning multiple CAVs’ trajectories simultaneously,
it can optimize goals that involve many agents, for
example, to improve traffic and eliminate phantom
queues.
Due to the nature of controlling multiple vehicles,
the structure of ADORe MAAD is simplified by re-
moving the trajectory controller, to avoid assumptions
of the individual vehicles and their hardware. The
ADORe MAAD nodes and topics, when controlling
groups of vehicles, can be seen in Fig. 7.
The ADORe interfaces are responsible for provid-
Figure 6: Example of the advantages when combining in-
frastructure and local autonomous driving, the CAV is driv-
ing along a road, and unable to see the person running to-
wards it, as they are hidden behind another vehicle.
Figure 7: ADORe MAAD ROS2 nodes and topics
overview.
ing ADORe MAAD with a list of traffic participants,
the HD map, and a list of the traffic participants the
framework can control. The respective controllabil-
ity is defined through received V2X messages, which
contain state, capability and goal point information
(see (Schindler et al., 2024)) to be sent to the view
node. A map provider node is responsible for creat-
ing a local map for the view component. This com-
ponent, described in Sec. 3.6.1 generates a view mes-
sage, containing information on each vehicle’s driv-
ing options and where they are heading. The view
message is then sent to the traffic predictor, which as
ADORe: Unified Modular Framework for Vehicle and Infrastructure-Based System Level Automation
577

described in Sec. 3.6.2, will generate trajectories for
all traffic participants. Lastly, the MAAD decision
maker, which is intended to be used for creating im-
provement to the trajectories in the future, but right
now only has the functionality of filtering out the traf-
fic participants not relevant for the vehicles driving
using ADORe SAAD.
3.6.1 View
The purpose of the View module is to provide a lo-
calized representation of the HD map at the agent
level, removing unnecessary structures and informa-
tion while delivering the lane features essential for
downstream planning tasks. The function of the View
module can be understood by considering the type of
information a multi-agent trajectory planner requires
to plan the ego vehicle’s trajectory and predict the tra-
jectories of other traffic participants. This required
information includes:
• The state of each traffic participant, including the
ego vehicle. This comprises position, orientation,
yaw rate, speed, acceleration, dimensions, and ID.
• A description of the center lane (with any poten-
tial forks) as well as the left and right lanes, if
present, for each traffic participant in the scenario.
The role of the View module is to associate each
traffic participant with its respective lane and incorpo-
rate this information into the published View topic.
The view message consists of a vector of vehi-
cle items. Each vehicle item contains the state of
the vehicle and vectors for its center lanes (plural, to
account for forks), left lanes, and right lanes. Each
lane item further includes the points defining its cen-
ter line.
3.6.2 Trajectory Predictor
Planning in a multi-agent environment like traffic re-
quires predicting the trajectories of other traffic par-
ticipants. This must be done simultaneously with
planning, as the trajectory of the ego vehicle affects
and is affected by the trajectories of other traffic par-
ticipants.
There are two ways in which this is done. Firstly,
a primitive forces-based approach where each agent
is pulled toward making progress on the lane centers
while being repulsed by other agents. This method
benefits from being fast to compute while suffering
from a lack of optimality. A second, more com-
plex approach involves modeling the traffic scenario
as a dynamic game and computing its Generalized
Nash Equilibrium (GNE) (Lucente et al., 2024). The
GNE represents a strategy combination in which each
player of the game adopts their best strategy, assum-
ing that the strategies of the other players remain un-
changed. In this context, each vehicle is modeled as
a player, and its objective is to choose the optimal
strategy (trajectory) that minimizes its cost while re-
specting collision constraints. To compute the GNE,
the constrained optimization problems are reformu-
lated as unconstrained optimization problems using
the augmented Lagrangian method. These uncon-
strained problems are then solved using the Trust Re-
gion method (Lucente et al., 2024).
While the Trust Region method ensures local conver-
gence, it cannot guarantee global convergence. Con-
sequently, there is no assurance that the equilibrium
found constitutes a true Nash equilibrium. For this
reason, the solver’s performance is sensitive to the ini-
tial solution. If the initial guess is sufficiently close to
the GNE, it is reasonable to assume that the solution
will converge to the global minimum and, thereby, to
the GNE.
3.6.3 Middleware Service
ADORe is used in very varying projects that impose
different requirements in terms of back-end connec-
tivity. The requirements usually revolve around ob-
taining mission goals or propagating the vehicle sta-
tus. To avoid project-specific implementation details
within the ADORe core, we implemented a simple
middleware service. This backend service is respon-
sible for interfacing with the different project-specific
backends while keeping the API for the ADORe side
stable. Only a small portion of project-specific glue
code in the form of a Python ROS2 node is needed,
while the middleware service handles complex hand-
shakes and any other kind of server communication.
4 EXPERIMENTS
ADORe has successfully been tested in multiple re-
search projects. Also, several demonstrations have
been conducted in different use cases, performed in
different cities and under multiple environmental con-
ditions.
4.1 Passenger Transport
In the German national research project Gaia-
X4ROMS, which deals with the support and remote
operation of automated and networked mobility ser-
vices, the NGC-FASCar has demonstrated a pro-
totypic implementation of a shuttle service (Rom,
2024). It was bookable through a mobile app to
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
578
pickup individual passengers at specific bus stops.
The CAV drove around the perimeter along the green
path shown in Fig. 8. During the drives, it had to
interact with a mobile traffic light sending out V2X
messages.
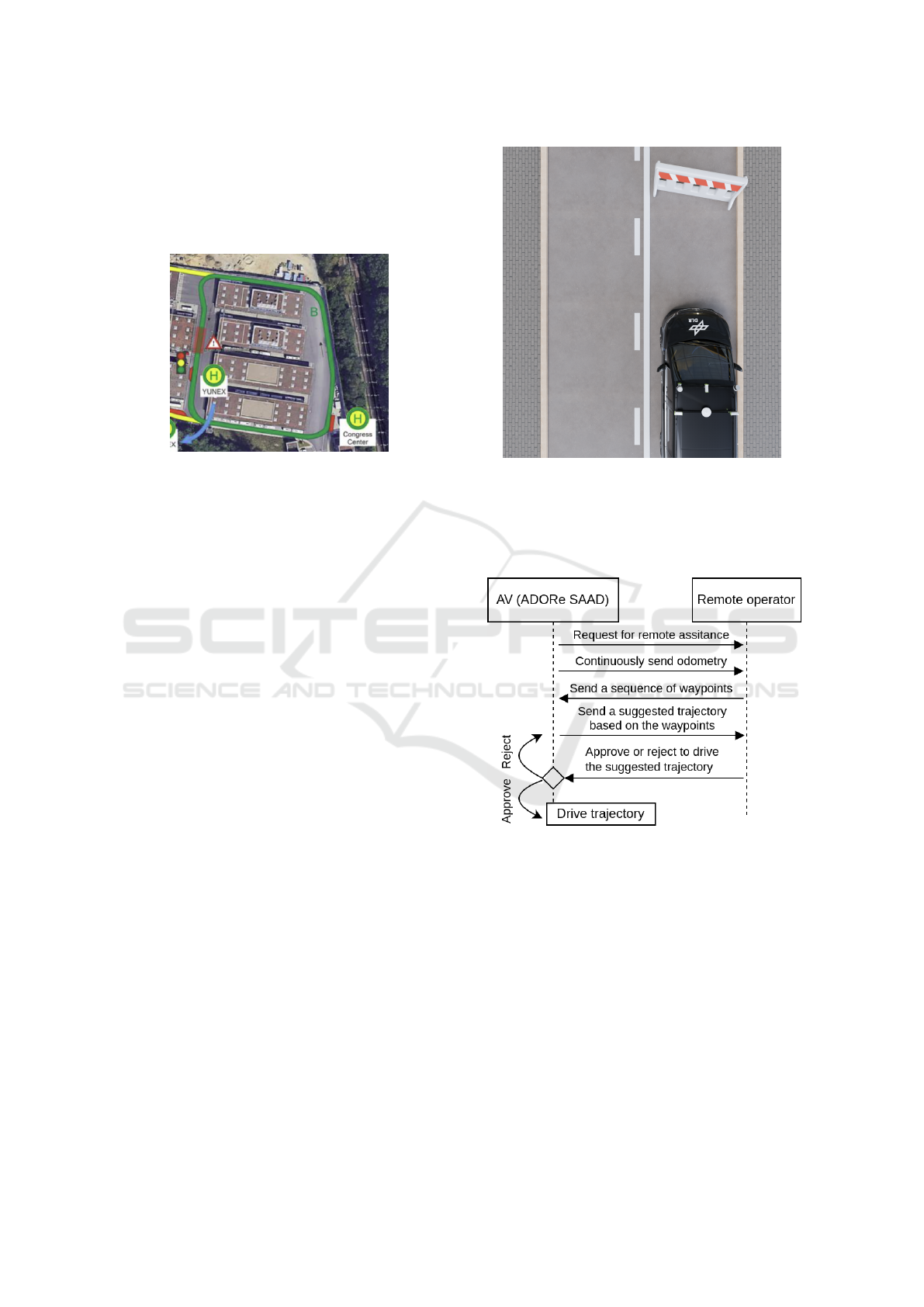
Figure 8: Gaia-X4ROMS driving demo area, showing the
two different pick-up and drop-off locations and a traffic
light.
A video of the vehicle driving the
route observed in Fig. 8 can be seen in:
https://github.com/DLR-TS/adore_videos/
blob/main/links.md#hamburg-driving-demo.
4.1.1 Remote Operations
A main use case that has been worked on at DLR is
remote operations, where a remote operator is taking
over control of CAVs running ADORe SAAD, in sit-
uations where the CAV is unable to make decisions
itself. The focus is primarily on remote assistance
while remote driving plays a minor role. Detailed in-
formation regarding the related project scope is pro-
vided at (Rem, 2024). An example scenario where
remote operations could be beneficial can be seen in
Fig. 9, where the CAV is driving along a given route,
that is blocked by temporal road construction. How-
ever, due to the solid line road marking, the CAV is
not allowed to cross the line to pass the obstacle, even
though there is no other way to get around. The ve-
hicle simply may not be allowed to perform this ac-
tion due to its restricted Operational Design Domain
(ODD).
During the scenario, the CAV is approaching the
obstacle while continuously monitoring its Operating
Domain in conjunction with the defined ODD. In case
there is a mismatch, the CAV is triggering a Mini-
mum Risk Maneuver (MRM) while at the same time
it is requesting remote assistance as explained in Sec.
3.5.2. The MRM consists of a smooth braking maneu-
ver accompanied by hazard lights. Contacting of the
remote operator is currently achieved by pushing re-
lated state information via MQTT wirelessly through
Figure 9: Example of a situation an CAV can encounter,
where human intervention could be required.
the nearby infrastructure or by using mobile commu-
nication. The CAV and remote operator then begin
the negotiation depicted in Fig. 10.
Figure 10: The communication between the AV running
ADORe SAAD and the remote operator to escape a situ-
ation.
After first sending a request for remote assistance
the CAV will continuously throughout the negotiation
transmit odometry at 1 Hz. The remote operator, upon
receiving the request and odometry will then see a vi-
sualization of the CAV in their visualization tool seen
in Fig. 11. From the visualization tool, the remote op-
erator can then enter a set of waypoints that they want
the CAV to drive, as seen in Fig. 11.A, which is then
sent to the CAV.
After the CAV receives the waypoints, it will
calculate a trajectory locally using its own planner as
described in Sec. 3.5.2, and return it to the remote
ADORe: Unified Modular Framework for Vehicle and Infrastructure-Based System Level Automation
579

Figure 11: A. The remote operator’s visualization of the
AV running ADORe SAAD with placed waypoints. B. The
remote operator’s visualization of the received trajectory.
operator for final approval. When the remote operator
receives the trajectory, it will be visualized as shown
in Fig. 11.B, and the remote operator can then decide
to either approve or reject. If the remote operator re-
jects the trajectory, the CAV will generate a new one
for approval. If the trajectory is accepted, the CAV
will begin driving the trajectory until it reaches the
end, where it switches back to automated driving and
stops contact with the remote operator. A video of
the car driving the remote operations example shown
in Fig. 11 can be seen here: https://github.com/
DLR-TS/adore_videos/blob/main/links.md#
remote-operation-demo-braunschweig.
4.1.2 Safety Corridor
Part of the German national project Gaia-X4AMS
(Advanced Mobility Services) was about leveraging
vehicle automation to create safety corridors during
emergencies (Ams, 2024). In this scenario, the au-
tomated vehicle detects an emergency through V2X
communication, receiving detailed information about
the safety corridor. This information includes a
polygonal area representing the path an emergency
vehicle will take. Upon receiving this data, the au-
tomated vehicle promptly calculates and executes an
evasive trajectory to vacate the polygon area. By do-
ing so, it helps forming an emergency lane, ensuring a
clear path for the emergency vehicle to pass through.
4.2 Collaborative Automated Driving
The collaborative relationship outlined in this pa-
per between ADORe SAAD and ADORe MAAD
has been developed as part of the German national
research project MAD-Urban (Managed Automated
Driving) (Mad, 2024). Throughout this project, pro-
tocols and the related system architecture for ”Man-
Figure 12: Ego Vehicle (white) leaving the safety corridor
to form emergency lane for emergency vehicle (red) to pass
by.
aged Automated Driving” have been developed and
implemented in research vehicles and local infras-
tructure components of DLR and project partners
(Schindler et al., 2024). First tests successfully estab-
lished the link between SAAD and MAAD, so that
infrastructure-based trajectories have been followed
by CAVs. The work is continued to bring the tech-
nology to public roads.
5 CONCLUSION
This paper introduces ADORe, German Aerospace
Center’s research framework for system-level auto-
mated driving of single CAVs controlled in-vehicle,
and multiple CAVs controlled by surrounding infras-
tructure, achieving both automated driving and coop-
erative automated driving. ADORe is ROS2-based
and comes packaged with its own integrated build
system and developer environment. The software
framework is divided into three stacks. First, the
ADORe interfaces, tailored to specific hardware or
software, are the only modules that would need mod-
ification to adapt to new vehicles or software. Sec-
ondly, the ADORe single-agent autonomous driving
stack, designed for use inside of a single vehicle,
which based on its conditions and available data can
make decisions on how to drive, plan, and execute tra-
jectories independently. Thirdly, the ADORe multi-
agent automated driving is intended to run on infras-
tructure, and will generate trajectories for all CAVs in
the local area, allowing for traffic optimizations not
possible by a single vehicle. ADORe has been suc-
cessfully used and demonstrated in several research
projects. While being further developed in recently
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
580

started and upcoming research projects, it is open-
source and available on Github: https://github.
com/DLR-TS/adore.
REFERENCES
(2023). Home Page - Autoware. [Online; accessed 10. Dec.
2024].
(2024). AMS. [Online; accessed 17. Dec. 2024].
(2024). Apollo. [Online; accessed 10. Dec. 2024].
(2024). Docker: Accelerated Container Application Devel-
opment. [Online; accessed 19. Dec. 2024].
(2024). Foxglove - Visualization and observability for
robotics developers. [Online; accessed 20. Dec. 2024].
(2024a). J3016 202104: Taxonomy and Definitions for
Terms Related to Driving Automation Systems for
On-Road Motor Vehicles - SAE International. [On-
line; accessed 13. Dec. 2024].
(2024b). J3216 202107: Taxonomy and Definitions for
Terms Related to Cooperative Driving Automation for
On-Road Motor Vehicles - SAE International. [On-
line; accessed 13. Dec. 2024].
(2024). lichtblick. [Online; accessed 10. Dec. 2024].
(2024). MAD Urban. [Online; accessed 17. Dec. 2024].
(2024). OptiNLC. [Online; accessed 20. Dec. 2024].
(2024). Remote Operation: An important building block
from Braunschweig for the mobility of the future.
[Online; accessed 17. Dec. 2024].
(2024). ROMS Abschlussevent. [Online; accessed 17. Dec.
2024].
(2024). rviz. [Online; accessed 20. Dec. 2024].
Althoff, M., Koschi, M., and Manzinger, S. (2017). Com-
monroad: Composable benchmarks for motion plan-
ning on roads. In 2017 IEEE Intelligent Vehicles Sym-
posium (IV), pages 719–726. IEEE.
Alvarez Lopez, P., Banse, A., Barthauer, M., Behrisch, M.,
Cou
´
eraud, B., Erdmann, J., Fl
¨
otter
¨
od, Y.-P., Hilbrich,
R., Nippold, R., and Wagner, P. (2024). Simulation of
urban mobility (sumo).
Behrisch, M., Bieker, L., Erdmann, J., and Krajzewicz, D.
(2011). Sumo - simulation of urban mobility: An
overview. In of Oslo Aida Omerovic, S. . U., Simoni,
R. I. R. T. P. D. A., and Bobashev, R. I. R. T. P. G.,
editors, SIMUL 2011, The Third International Confer-
ence on Advances in System Simulation, pages 63–68,
Barcelona, Spain. ThinkMind.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). CARLA: An open urban driving
simulator. In Proceedings of the 1st Annual Confer-
ence on Robot Learning, pages 1–16.
Li, Y., Yuan, W., Zhang, S., Yan, W., Shen, Q., Wang,
C., and Yang, M. (2023). Choose Your Simulator
Wisely: A Review on Open-source Simulators for Au-
tonomous Driving. arXiv.
Lucente, G., Maarssoe, M. S., Konthala, S. H., Abulehia,
A., Dariani, R., and Schindler, J. (2024). Deepgame-
tp: Integrating dynamic game theory and deep learn-
ing for trajectory planning. IEEE Open Journal of In-
telligent Transportation Systems, pages 1–1.
L
¨
ucken, L., Schwamborn, M., Mintsis, E., Koutras,
D., Karagounis, V., Correa, A., Sepulcre, M.,
Coll Perales, B., Thandavarayan, G., Blokpoel, R.,
Zhang, X., Huisken, G., Boerma, S., Maerivoet,
S., Carlier, K., P
´
apics, P., Ons, B., Tourw
´
e, S.,
Banse Bueno, O. A., and Schindler, J. (2021). Tran-
sAID Deliverable 6.2/2 - Assessment of Traffic Man-
agement Procedures in Transition Areas. [Online; ac-
cessed 11. Dec. 2024].
Malinauskas, R. (2014). The intelligent driver model: Anal-
ysis and application to adaptive cruise control.
Rajamani, R. (2011). Vehicle dynamics and control.
Springer Science & Business Media.
Schindler, J., Dariani, R., Klein, P., Lee, A., and Fleck,
T. (2024). Automated Vehicles Controlled By Smart
Infrastructure – The Architecture Of Managed Auto-
mated Driving. In ERTICO, editor, 2024 ITS World
Congress Paper Publications Part 2, pages 1210–
1220, Dubai, VAE. ERTICO.
Schindler, J., Klein, P., Fleck, T., and Lee, A. (2023).
Managed Automated Driving (MAD) - a Concept for
Empowering Road Infrastructure. In ERTICO, edi-
tor, 2023 ITS European Congress Book of Abstracts,
pages 933–944, Lisbon, Portugal. ERTICO.
Stellato, B., Banjac, G., Goulart, P., Bemporad, A., and
Boyd, S. (2020). Osqp: an operator splitting solver
for quadratic programs. Mathematical Programming
Computation, 12(4):637–672.
Tang, S., Zhang, Z., Zhang, Y., Zhou, J., Guo, Y., Liu,
S., Guo, S., Li, Y.-F., Ma, L., Xue, Y., and Liu, Y.
(2023). A Survey on Automated Driving System Test-
ing: Landscapes and Trends. ACM Trans. Software
Eng. Method., 32(5):1–62.
Testouri, M., Elghazaly, G., and Frank, R. (2024). Robo-
Car: A Rapidly Deployable Open-Source Platform for
Autonomous Driving Research. arXiv.
Tong, K., Ajanovic, Z., and Stettinger, G. (2020). Overview
of Tools Supporting Planning for Automated Driving.
arXiv.
Xu, R., Guo, Y., Han, X., Xia, X., Xiang, H., and Ma,
J. (2021). Opencda: an open cooperative driving
automation framework integrated with co-simulation.
In 2021 IEEE International Intelligent Transportation
Systems Conference (ITSC), pages 1155–1162. IEEE.
ADORe: Unified Modular Framework for Vehicle and Infrastructure-Based System Level Automation
581
