
Synthetic Data-Driven Object Detection for Rail Transport: YOLO vs
RT-DETR in Train Loading Operations
Thiago Leonardo Maria
1 a
, Saul Delabrida
1,2 b
and Andrea Gomes Campos
1,2 c
1
Graduate Program in Instrumentation, Control and Automation of Mining Processes (PROFICAM),
Federal University of Ouro Preto (UFOP) and Vale Institute of Technology (ITV), Minas Gerais, Brazil
2
Department of Computing (DECOM), Federal University of Ouro Preto (UFOP), Ouro Preto, Brazil
Keywords:
Wagon, Object Detection, Synthetic Data.
Abstract:
Efficient wagon loading plays a crucial role in logistic efficiency and supplying essential raw materials to
various industries. However, ensuring the cleanliness of the wagons before loading is a critical aspect of this
process as it directly impacts the quality and integrity of the transported item. Early detection of objects inside
empty wagons before loading is a key component in this logistic puzzle. This study proposes a computer
vision approach for object detection in train wagons before loading and performs a comparison between two
models: YOLO (You Only Look Once) and RT-DETR (Real-Time Detection Transformer), which are based on
Convolutional Neural Networks (CNNs) and Transformers, respectively. Additionally, the research addresses
the generation of synthetic data as a strategy for model training, using the Unity platform to create virtual
environments that simulate real conditions of wagon loading. Therefore, the findings highlight the potential of
combining computer vision and synthetic data to improve the safety, efficiency, and automation of train loading
processes, offering valuable insights into the application of advanced vision models in industrial scenarios.
1 INTRODUCTION
Computer vision has emerged as a powerful tool in the
industry, transforming the way object inspection and
detection are carried out in industrial environments,
all due to the exponential advancement of technol-
ogy (Zhang et al., 2014). Combining image process-
ing algorithms and artificial intelligence techniques,
computer vision enables systems to interpret and un-
derstand the visual environment, enabling a variety
of applications in industrial automation (Sonka et al.,
2014).
Autonomy in industrial inspection is fundamen-
tal to guarantee the efficiency, quality, and safety of
production processes. Traditionally, inspection is car-
ried out manually, which is susceptible to environ-
mental influences, often leading to human errors (El-
Masry et al., 2012), in addition to requiring significant
time and resources, and its accuracy is not guaranteed
(Park et al., 1996). However, advances in computer
vision have enabled automated inspection systems ca-
a
https://orcid.org/0009-0002-8815-4989
b
https://orcid.org/0000-0002-8961-5313
c
https://orcid.org/0000-0001-7949-1188
pable of analyzing and interpreting images quickly
and accurately. These systems can identify defects,
anomalies, and objects of interest in real time, all
without requiring physical contact with the environ-
ment. (Aydin et al., 2014).
Object detection in industry is a key application of
computer vision, with diverse applications including
product tracking, automated selection, quality con-
trol, and workplace safety (Megahed and Camelio,
2012). The ability to detect and recognize objects
in complex and dynamic industrial environments is
essential to ensure process efficiency and prevent ac-
cidents and contamination. As a result, foreign ob-
ject detection makes industrial processes more effi-
cient and safer.
Rail transport plays an essential role in the global
supply chain, providing a viable and sustainable alter-
native to road transport. In the United States and the
European Union, the average volume of rail freight
transported between 2006 and 2019 was approxi-
mately 2.8 trillion tonne-kilometers (Gholamizadeh
et al., 2024). Statistics show that expanding rail net-
works and using them efficiently are crucial to meet-
ing global logistics demand and supporting sustain-
able economic and environmental practices.
Maria, T. L., Delabrida, S. and Campos, A. G.
Synthetic Data-Driven Object Detection for Rail Transport: YOLO vs RT-DETR in Train Loading Operations.
DOI: 10.5220/0013402500003929
In Proceedings of the 27th International Conference on Enterprise Information Systems (ICEIS 2025) - Volume 1, pages 873-880
ISBN: 978-989-758-749-8; ISSN: 2184-4992
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
873

Railroads often pass through areas where low-
income people live. Due to the presence of single-
track sections of a single line where there is traffic in
both directions, the train must wait to pass through
the route it chooses. Therefore, trains that are not op-
erating must be stopped at intersections and in areas
adjacent to cities. It is not uncommon for waste to be
improperly discarded into the wagons, posing chal-
lenges to operational efficiency and cargo integrity
Early detection of objects inside these empty wag-
ons before loading is a critical necessity to ensure op-
erational efficiency and safety of the logistics process.
The presence of unwanted objects can compromise
not only the logistical organization but also the in-
tegrity of the transported item.
In the mining industry, trains must typically main-
tain a speed of approximately 10 km/h when entering
a loading terminal to perform the tare process. How-
ever, when foreign object detection process is carried
out visually by the operator, this speed is reduced in
some terminals. Consequently, the tare time is in-
creased, which leads to a delay in the start of charging.
The relevance of keeping wagons clean before
loading goes beyond logistical organization. Clean-
ing plays a crucial role in preserving the quality of the
transported item, especially in the mining industry,
preventing unwanted contamination that could com-
promise the integrity of the final product. Efficient
object detection inside wagons not only optimizes the
loading process but also ensures the quality of the ore
from its origin to its final destination, affecting both
its value and reliability.
It is often difficult to obtain real data for train-
ing object detection models. Some of these difficul-
ties may be dangerous or difficult-to-access environ-
ments, rare or extremely specific scenarios, applica-
tions with private or sensitive data, cost of data collec-
tion, and ethics and consent for data collection. Many
of these data acquisition difficulties come with the
search for synthetic data, and one way to obtain this
data is to use AI to generate this data. However, this
method comes with some difficulties, some of which
are the lack of perfect realism, it requires a lot of com-
putational effort, it can generate bias in the generated
data, problems with dynamic scenarios, and difficulty
in generating extreme cases. Another alternative for
generating synthetic data is to create a realistic virtual
environment that simulates the situation from which
you want to obtain the data.
The main objective of this study is to develop a
computer vision-based approach for detecting objects
in train wagons before loading operations.
The specific objectives include:
• Address the generation of synthetic data as a strat-
egy for training the models, using the Unity plat-
form to create virtual environments that faithfully
simulate the real conditions of wagons.
• Compare two object detection models, one widely
recognized, YOLO (You Only Look Once) v.10
and RT-DETR (Real Time Detection Trans-
former), based on convolutional neural networks
(CNNs) and Transformers, respectively, high-
lighting their particularities and advantages for the
detection of objects specifically in train cars.
• Contribute to the efficiency and safety of the
wagon loading process, exploring the capabilities
of computer vision, the comparison between es-
tablished models, and the generation of realistic
synthetic data.
Using computer vision and comparing two known
models trained using realistic synthetic data generated
by 3D simulation, this paper aims to analyzing which
is the best specific object detection system for train
loading with that increasing the efficiency and safety
in train loading by assisting the loading operator in
decision-making. Progress made in this area not only
improves operational practices but also encourages a
smarter and more technologically advanced approach
to rail transportation and logistics.
2 RELATED WORKS
The use of computer vision and artificial intelligence
can solve many practical problems, including those
currently being solved in the industrial environment.
This chapter examines several ways in which these
technologies can be used to detect foreign objects and
anomalies in the industrial environment.
(Yang et al., 2014) presents a real-time inspec-
tion system for conveyor belts using computer vision.
The objective of the system is to find and classify
unwanted objects that may impair the efficiency or
safety of the conveyor process in industrial produc-
tion lines. The proposed system analyzes the images
captured by cameras installed along the conveyor belt
and, using a combination of machine learning and im-
age processing methods classifies the objects to make
decisions. The experimental results show the effec-
tiveness of the proposed system in detecting and clas-
sifying objects in real-time, highlighting its potential
to automate and improve inspection processes in in-
dustrial production lines.
(Yao et al., 2023) present an improved method for
detecting foreign objects on conveyor belts using the
YOLOX model. To detect unwanted objects on indus-
trial conveyor belts, they introduced modifications to
ICEIS 2025 - 27th International Conference on Enterprise Information Systems
874
the YOLOX model. This improves industrial inspec-
tion systems by ensuring the safety and efficiency of
transportation processes. But this system often needs
adjustments for different belt types, materials or de-
fect patterns. This limits generalization and requires
specific settings for each application environment.
In the railway (Chen W, 2022) describes a system
for detecting foreign objects in images, using a two-
stage convolutional neural network. The authors pro-
pose an approach to identify and classify unwanted
objects in railway track images, aiming to improve
the safety and efficiency of railway operations. The
system is trained on a large dataset of railway images,
allowing it to learn to detect and classify foreign ob-
jects with high accuracy.
(H
¨
utten et al., 2022) explores the application of
the Transformer architecture in industrial visual in-
spection, trained in three different use cases in the do-
main of visual damage assessment for railway freight
car maintenance. This paper explains how the Trans-
former approach has been modified and used for vi-
sual inspection tasks. The paper discusses the advan-
tages and disadvantages of the ViT approach com-
pared to other traditional convolutional neural net-
work architectures, such as CNNs. The experiment
results show that the Vision Transformer architecture
can be competitive in several industrial visual inspec-
tion tasks, outperforming or equaling other conven-
tional architectures.
(Salas et al., 2020) presents an approach to train
object detection and segmentation models on im-
ages of industrial machinery. Rather than relying
solely on real-world datasets, the authors propose us-
ing computer-generated synthetic images to train and
improve the performance of models. The paper de-
scribes the process of synthetic image generation,
which involves creating 3D models of industrial ma-
chines and objects of interest, rendering these models
in different virtual environments, and capturing im-
ages from these environments. After generating the
synthetic images, the authors conduct experiments to
compare the performance of models trained with syn-
thetic data compared to models trained only with real
data.
Most of the articles presented use CNNs in their
object detection, (Yang et al., 2014) and (Yao et al.,
2023) mention some limitations of using this type of
approach on conveyor belts, such as adverse environ-
mental conditions, such as dust, variable lighting and
complex background noise. These factors can affect
the detection accuracy and robustness of the model,
especially in scenarios with poor visibility or partially
obscured objects. (H
¨
utten et al., 2022) validates the
use of the Transformer architecture saying that it has
a better performance than other traditional architec-
tures in industrial visual inspection, this highlights
the potential of the Transformer approach to boost
automation and efficiency in industrial environments
through advanced visual inspection. (Salas et al.,
2020) demonstrate that training with synthetic data, in
addition to real data, can lead to significant improve-
ments in the accuracy and robustness of the models,
especially in challenging conditions that were not ad-
equately covered by real data.
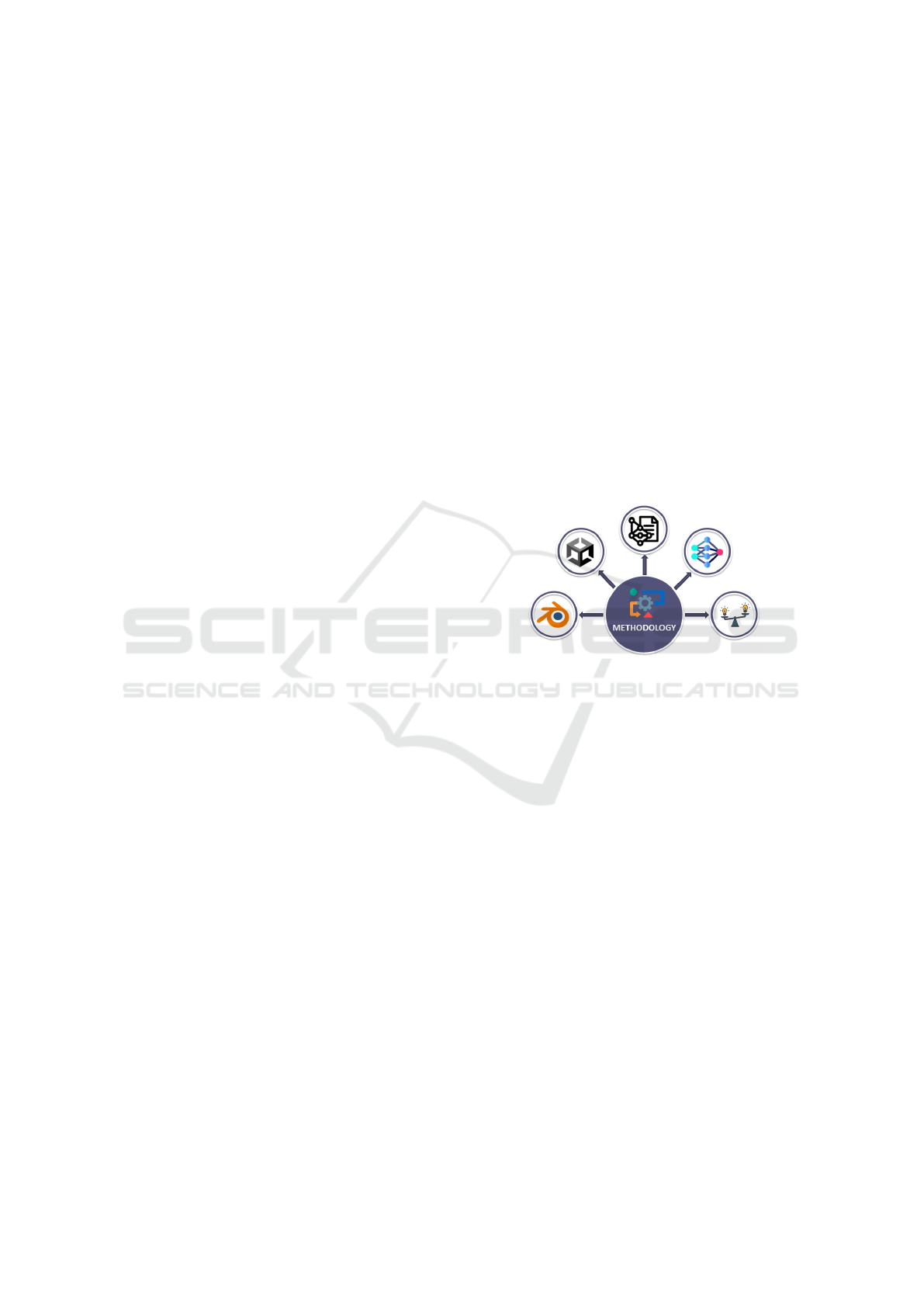
3 METHODOLOGY
The methodology of this work consists of the follow-
ing steps: 3D modeling and texturing, scene creation
in Unity, synthetic data generation, training YOLO
and RE-DETR detection networks, and comparing re-
sults.
Figure 1: Steps of the proposed methodology.
3.1 3D Modeling and Texturing
3D models are necessary for the creation of the sim-
ulated 3D virtual environment. The models used in
this work will be acquired from marketplaces. The
marketplaces used were blendswap.com, free3d.com,
assetstore.unity.com and mixamo.com. Most of the
objects were obtained for free and some that could
not be found this way were purchased. Models not
found this way will be modeled and textured using
the Blender tool, which is a free modeling tool.
The objects will be divided into two categories:
main objects and foreign objects. The main objects
will be all the objects that make up the scene, such
as the train car, the tracks, vegetation, and terrain.
The foreign objects will be the unwanted objects that
will appear inside the cars. The foreign objects will
be divided into two categories: inanimate objects and
living objects: animals and humans. A total of 200
objects and variations will be selected, with 100 inan-
imate objects, 50 humans, and 50 animals.
Inanimate objects and animals will be chosen ac-
cording to the chance of this type of object appearing
Synthetic Data-Driven Object Detection for Rail Transport: YOLO vs RT-DETR in Train Loading Operations
875

inside the wagons and the quantity of objects chosen
to provide sufficient variability in the generation of
synthetic data. The human category will have 10 dif-
ferent humans in 5 different poses.
Figure 2: Example of objects, animal and human category
respectively.
3.2 Scene Creation in Unity
Unity is a game engine widely used for simulations
and creation of interactive virtual environments.
The construction of the simulated scene in Unity
is a crucial step, it consists of assembling a virtual en-
vironment capable of simulating the reality of train
loading with a certain realism, using acquired and
modeled objects incorporating various techniques to
increase the fidelity of the simulation, techniques such
as:
• Using ray tracing to enhance visual realism, al-
lowing for a more accurate representation of light-
object interaction in the scene (Skala et al., 2024).
• Development of a dynamic lighting system, capa-
ble of adjusting to the variable conditions of the
simulated environment, providing realistic varia-
tions in luminosity.
• Implementation of a rain system to add climate
variations to the simulation.
• Addition of wagons representing mineral waste to
incorporate realistic conditions.
• Implementation of a random arrangement of ob-
jects inside the wagons to increase the variability
of the synthetic data.
The Unity tool has three rendering pipelines, one
of which is the High Definition Render Pipeline
(HDRP), which prioritizes graphic quality using sev-
eral tools. One of these tools is ray tracing, a tech-
nology that simulates the behavior of light in the real
world to create more realistic and immersive graphics.
The use of this pipeline also facilitates the creation
of a climate system with rain cycles and has many
post-processing tools that allow us to add effects to
the camera to improve the visuals.
Unity uses C# to create scripts, these scripts allow
the manipulation of almost everything within the tool.
With these scripts, the entire dynamic system of this
simulated scene will be developed, such as the move-
ment of the trains, the day and night cycle, climate
control, and the random appearance of objects inside
the wagons, among other tasks.
3.3 Synthetic Data Generation
From the virtual loading environment previously cre-
ated in Unity, with all simulations and techniques to
increase realism, some additional configurations will
be made to generate synthetic data. This process will
be conducted following the steps:
• Careful selection of camera settings, including
resolution, aspect ratio, FOV, and position/tilt,
aligned with the usual specifications in the indus-
try.
• Configure post-processing effects such as bloom,
ambient occlusion, motion blur and vignette.
• Creation of a script to generate tag files to la-
bel objects in the simulated scene, facilitating the
training of detection models.
• Generation of images to compose the training and
validation data set, considering a comprehensive
representation of the object detection conditions.
Will be generated a set contain 6600 images, 5280
for training and 1320 for validation, with 10% of
background images in each category. These images
will contain different settings such as day, night, day
with rain and night with rain. This number of images
was calculated based on Ultralytics suggestion in its
documentation.
3.4 Training YOLO and RE-DETR
Model
The training phase of the YOLO and RT-DETR de-
tection networks involves preparing the synthetic data
generated. This step will be performed using train-
ing and testing sets from the Unity simulation of the
different experiments, with the appropriate object an-
notations. For this training, the RT-DETR-l and RT-
DETR-x models will be used, which are the large
and extra large models, respectively. In addition,
the YOLO models to be used are YOLOv10l and
ICEIS 2025 - 27th International Conference on Enterprise Information Systems
876

YOLOv10x, which are compatible with the RT-DETR
models used. These models were chosen according to
the availability of models provided by Ultralytics.
The training will be performed on a physical ma-
chine equipped with a 12-core AMD Ryzen 9 5900X
processor, an NVIDIA GeForce RTX3090 graphics
card with 24GB of VRAM and 64GB of DDR4 RAM
at 3200MHz.
3.5 Comparing Results
The final phase of the research involves a comparison
between the YOLO and RT-DETR networks consid-
ering the different experiments.
The MAP (Mean Average Precision) metric will
be used, which is commonly used to evaluate the
accuracy and performance of object detection algo-
rithms in computer vision. It is especially relevant in
object detection tasks where multiple objects can be
present in a single image and it is important to evalu-
ate the detection accuracy for each object class.
The mAP50 and mAP90 metrics will be used to
evaluate object detection models. Evaluation at Dif-
ferent Accuracy Thresholds mAP50 measures model
performance considering a more relaxed intersection-
over-union criterion. It is useful for evaluating
whether the model can detect objects at approximate
positions, even if the segmentation or bounding is not
highly accurate. mAP90 measures performance un-
der a more rigorous criterion. It focuses on detection
accuracy, evaluating whether the bounding boxes are
perfectly aligned with the objects.
4 RESULTS
During the course of the project, several versions of
the synthetic data generator were developed. The first
was the proof of concept, in which a model of moving
wagons was created, in which objects such as cubes
and spheres were randomly inserted, replicating the
conditions found in a railway environment. These ob-
jects were later replaced by items found inside wag-
ons, increasing the fidelity of the simulation.
To control the movements of the wagons and the
items that appear inside them, a dedicated script was
developed. This script allows the variation of parame-
ters such as the speed of the wagons and the chance of
a wagon having an item inside. In addition, the strate-
gic addition of a camera positioned above the wagons
allowed for the accurate capture of images, essential
for object detection and subsequent analysis.
As an integral part of the simulation, a dynamic
day-night cycle system was implemented, contribut-
ing to diversifying the lighting conditions and increas-
ing the realism of the scene. This approach enriches
the simulated environment, making it more complex
and closer to the real conditions encountered during
loading operations.
Figure 3: Proof of concept scene in Unity.
4.1 Acquisition of 3D Objects
The next step was to obtain the 3D objects. Scene
composition objects such as train tracks, trees, and
terrain were modeled and textured in the Blender tool.
The train car, one of the main models requiring more
details, was acquired from a 3D object marketplace
and subsequently applied a custom texture using the
Blender tool.
The models of inanimate objects, animals, and hu-
mans were mostly acquired for free from various mar-
ketplaces; all models have a CC-00 license.
All models went through an adaptation process
to be used in Unity, which consisted of reducing the
mesh size for objects with a very high polygon count
and retexturing for some objects.
4.2 Configuration Script
After collecting the 3D models, the development of
the synthetic data generator began. Based on the
proof of concept, new 3D models were added, cre-
ating a more realistic virtual environment.
A script called “GameManager” was created to
manage and configure all the settings for the symmet-
ric data generator. This script has multiple settings
that allow for the customization of the loading envi-
ronment, the objects that appear randomly inside the
wagon, and the dynamic weather and climate condi-
tions. Additionally, the script automates the creation
of the folder structure needed to separate and save the
generated data.
4.3 Positioning of Objects
The positioning of the objects inserted into the wagon
is randomly chosen from eight positions along the
Synthetic Data-Driven Object Detection for Rail Transport: YOLO vs RT-DETR in Train Loading Operations
877

Figure 4: Part of the configuration script.
wagon, in addition to the rotation of the object on
the vertical axis being defined randomly. Objects
are placed slightly above the wagon, and the Unity
physics engine simulates the item falling into the
wagon. This process allows objects to rotate and settle
in various orientations, exponentially increasing the
diversity of their positions within the wagon.
The number of objects inside the wagon ranges
from 1 to 3. The first object will always be inserted,
the second object has a 50% chance of appearing, and
the third object has a 25% chance, ensuring variability
in the dataset while maintaining a realistic scenario.
4.4 Day and Night and Rain Cycles
The day and night cycle implemented in the proof
of concept uses Unity’s lighting systems to configure
light emission, activate dynamic shadows, and rotate
sun objects.
In addition to the day and night cycle, a rain cy-
cle was implemented. This rain cycle uses Unity’s
particle system to simulate rain and has a random in-
tensity of rain, fog, and lighting every time the rain
starts. Furthermore, textures for the wagon, environ-
ment, and objects are dynamically modified to appear
wet when the rain cycle starts.
To enhance the realism of the simulated environ-
ment, Ray Tracing and other filters such as Bloom,
Screen Space Ambient Occlusion, Screen Space Re-
flection and several others were used. These filters
are commonly used in games with realistic graphics,
which helps maintain fidelity to real environments.
The combination of these filters with day and night
and rain cycles helps to diversify the synthetic data
generated.
Figure 5: The cycles in the simulation.
4.5 3d Object Separation
In addition to the objects, humans and animals di-
vision, another general division of the 3D objects is
made. They are randomly divided into five groups
using a seed to enable repeatability. This division is
necessary so that the training data and validation data
contain different 3d models, promoting better gener-
alization of the trained models. Four of these five
groups will be used for training and the last for val-
idation.
4.6 Label File and Synthetic Data
Generation
One of the advantages of using synthetic data is the
ability to generate labels automatically. In Unity we
used the list of vertex positions of the mesh of the ob-
jects inside the wagon. This list of vertex positions
is collected and converted to the camera space. By
finding the maximum and minimum horizontally and
vertically, the bounding box of the object can be de-
termined. After that, it is necessary to apply some
limiting filters so that the values do not exceed the
screen limits and do not fall behind the wagon wall.
With the label data collected, all that remains is to
convert them to the label system that will be used. In
this case, the YOLO system will be used.
To generate synthetic data, it is checked whether
there are objects within the viewing space of the cam-
era that is inside the wagon. If there are any objects,
an image is generated and the process of generating
the label for this image begins. After that, the im-
age and the label are saved in their respective folders.
After this, a period of time is waited for the next iter-
ation and generation of the next data, this process is
repeated until the defined amount of data is reached.
ICEIS 2025 - 27th International Conference on Enterprise Information Systems
878
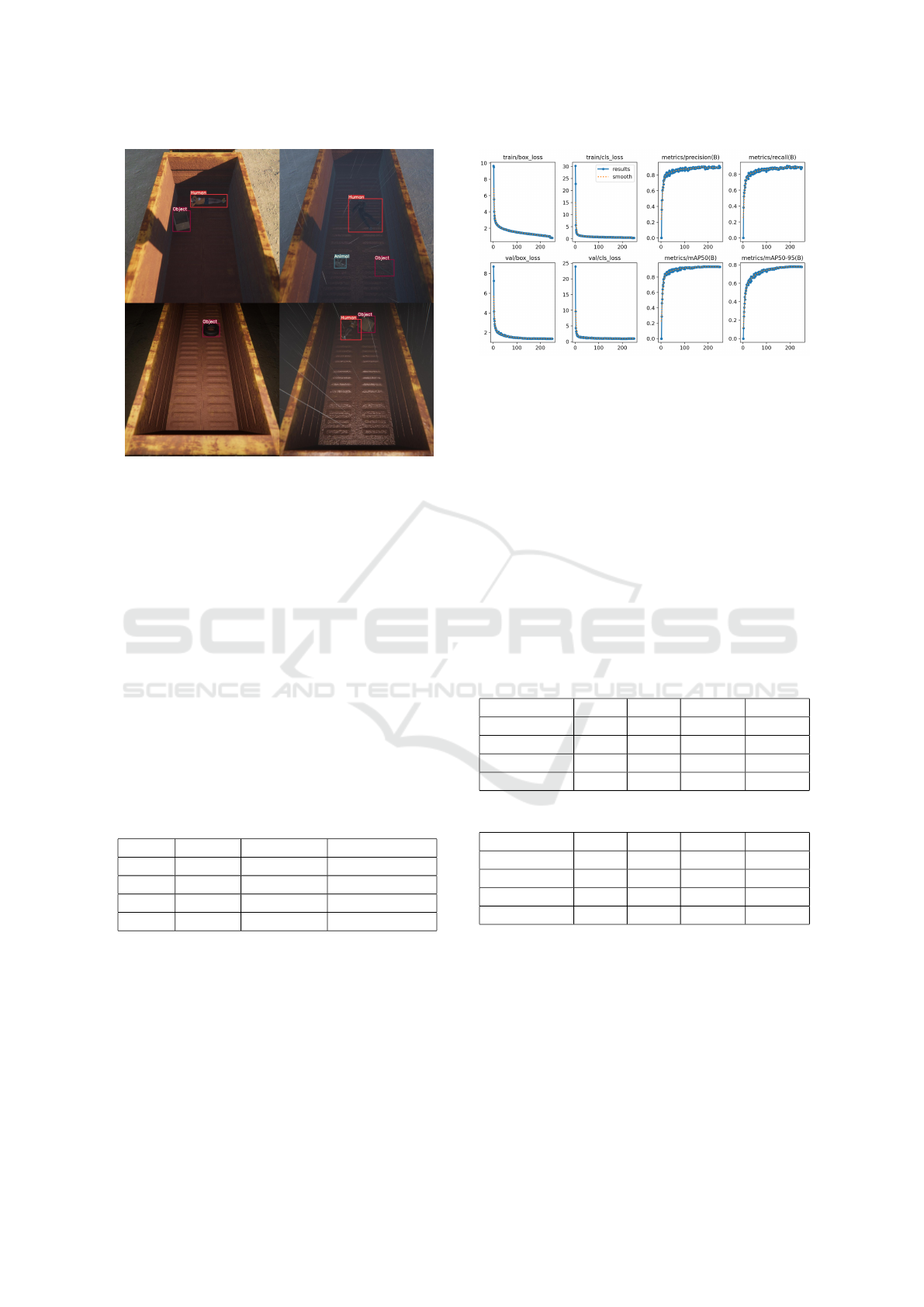
Figure 6: Example of data generated.
A total of 5.280 training images were generated,
including 480 of which are background-only im-
ages and 1.320 validation images, 120 of which are
background-only images. The images have a resolu-
tion of 1.080x1.080 pixels and were generated in ap-
proximately 6 hours. Figure 6 shows an example with
the bounding boxes already placed on the generated
data.
4.7 Model Training
Before the main model training, some pre-training
phase was performed to define the training resolu-
tion of the images and the ideal number of epochs for
this dataset. Four training sessions were performed
with resolutions of 1.080p, 640p, 480p and 384p in
50 epochs. The results are shown in the Table 1.
Table 1: Resolution pre-training result.
mAP50 mAP50-90 Train Time (h)
1080p 0.811 0.573 2.28
640p 0.809 0.561 0.85
480p 0.800 0.551 0.53
384p 0.765 0.523 0.38
After analyzing the results, the training resolution
was defined as 480p, since higher resolution values
did not show much improvement in the mAP50 val-
ues and at 480p the training time was reduced consid-
erably compared to higher resolutions, the inference
time will also be reduced in lower resolution. These
tests were performed for both YOLO and RT-DETR,
obtaining comparable results.
Another pre-training session was performed to de-
fine the number of epochs for training the models.
Figure 7: Epoch pre-training result.
Training was performed without an epoch limit with
a patience of 50, that is, 50 epochs without any im-
provement and the training ended. The training was
completed in 246 epochs. Analyzing the loss and
mAP graphs in the Figure 7, a limit of 250 epochs
was defined for training.
After the training configurations were defined,
the synthetic data generated was separated, the fifth
folder was selected as validation and the other four
folders was selected as training. Subsequently, the
four models, YOLOV10l, YOLOV10x, RT-DETR-l
and RT-DETR-x were trained using the models pro-
vided by the Ultralytics library. Each training session
took an average of 6 hours to complete. The results
are presented in the Table 2 and Table 3.
Table 2: mAP50 values for classes and models.
Model All Obj Animal Human
YoloV10l 0.902 0.890 0.832 0.981
YoloV10x 0.909 0.890 0.855 0.982
RT-DETR-l 0.817 0.776 0.717 0.956
RT-DETR-x 0.800 0.747 0.702 0.950
Table 3: mAP50-95 values for classes and models.
Model All Obj Animal Human
YoloV10l 0.727 0.773 0.593 0.814
YoloV10x 0.729 0.765 0.612 0.811
RT-DETR-l 0.620 0.637 0.470 0.755
RT-DETR-x 0.589 0.595 0.435 0.736
The two tables provide comparisons between the
YoloV10l, YoloV10x, RT-DETR-l, and RT-DETR-
x detection models on different performance met-
rics, mAP50 (Table 2) and mAP50-95 (Table 3).
On mAP50, YoloV10x performed best overall with
0.909, beating YoloV10l with 0.902. The RT-DETR
models have lower values, with RT-DETR-x achiev-
ing 0.800 and RT-DETR-l 0.817.
In the mAP50-95 metric YoloV10x continues to
lead with 0.729 in overall performance, closely fol-
Synthetic Data-Driven Object Detection for Rail Transport: YOLO vs RT-DETR in Train Loading Operations
879

lowed by YoloV10x with 0.727. Although YoloV10l
and YoloV10x maintain high and similar perfor-
mance, the RT-DETR models face considerable dif-
ficulties with the mAP50-95 metric, indicating that
they have lower generalization ability across multiple
accuracy thresholds.
5 CONCLUSIONS
This work developed a synthetic data generator within
a fully virtual environment created using the Unity
tool. The environment was created specifically before
the loading of trains to evaluate two computer vision
models, one very well-known and more traditional
that uses convolutional neural networks, YOLO, and
another model that is based on Vision Transformers
(VITs). Specifically in this work, RT-DETR is being
used, which is a real-time VIT.
From the training results of the four models, two
from YOLO and two from RT-DETR of compatible
sizes, it was observed that, for this environment, in
the context of train loading, YOLO outperforms RT-
DETR by approximately 10% mAP results. Addition-
ally, no significant improvement was seen in perfor-
mance with the larger model sizes of either YOLO or
RT-DETR, indicating that increasing the model size
did not yield better results for this specific task.
In a real-world scenario, the insights from this
study show that a YOLO network can be applied in
the area of train loading to improve automation and
monitoring processes in loading operations. The abil-
ity of computer vision models to detect and analyze
loading conditions in real time can significantly im-
prove efficiency and become a great ally for the oper-
ator reducing human error and increasing safety.
Grounds for future work include expanding the
analysis to other vision networks, comparing perfor-
mance on different hardware, and comparing the use
of synthetic data, real data, and mixed data in training
the networks.
ACKNOWLEDGEMENTS
The authors thank the entire team of the Master’s
Program in Instrumentation, Control and Automa-
tion of Mining Processes (PROFICAM), Fundac¸
˜
ao
de Amparo
`
a Pesquisa do Estado de Minas Gerais
(FAPEMIG), Vale Technological Institute (ITV) and
Federal University of Ouro Preto (UFOP). This
study was financed in part by the Coordenac¸
˜
ao
de Aperfeic¸oamento de Pessoal de N
´
ıvel Superior
- Brasil (CAPES) - Finance Code 001, the Con-
selho Nacional de Desenvolvimento Cient
´
ıfico e Tec-
nol
´
ogico (CNPQ) financing code 306101/2021-1,
FAPEMIG financing code APQ-00890-23 and APQ-
01306-22, the Instituto Tecnol
´
ogico Vale (ITV) and
the Universidade Federal de Ouro Preto (UFOP).
REFERENCES
Aydin, I., Karakose, M., and Akin, E. (2014). A new
contactless fault diagnosis approach for pantograph-
catenary system using pattern recognition and image
processing methods. Advances in Electrical and Com-
puter Engineering, 14(3):79–89.
Chen W, Meng S, J. Y. (2022). Foreign object detection in
railway images based on an efficient two-stage convo-
lutional neural network. Comput Intell Neurosci.
ElMasry, G., Cubero, S., Molt
´
o, E., and Blasco, J. (2012).
In-line sorting of irregular potatoes by using auto-
mated computer-based machine vision system. Jour-
nal of Food Engineering, 112(1):60–68.
Gholamizadeh, K., Zarei, E., and Yazdi, M. (2024). Rail-
way Transport and Its Role in the Supply Chains:
Overview, Concerns, and Future Direction, pages
769–796. Springer International Publishing, Cham.
H
¨
utten, N., Meyes, R., and Meisen, T. (2022). Vision trans-
former in industrial visual inspection. Applied Sci-
ences, 12(23).
Megahed, F. and Camelio, J. (2012). Real-time fault detec-
tion in manufacturing environments using face recog-
nition techniques. Journal of Intelligent Manufactur-
ing, 23:1–16.
Park, B., Chen, Y.-R., Nguyen, M., and Hwang, H.
(1996). Characterizing multispectral images of tumor-
ous, bruised, skin-torn, and wholesome poultry car-
casses. Transactions of the ASABE, 39:1933–1941.
Salas, A. J. C., Meza-Lovon, G., Fern
´
andez, M. E. L., and
Raposo, A. (2020). Training with synthetic images for
object detection and segmentation in real machinery
images. IEEE.
Skala, T., Mari
ˇ
cevi
´
c, M., and
ˇ
Cule, N. (2024). Optimization
and application of ray tracing algorithms to enhance
user experience through real-time rendering in virtual
reality. Acta Graphica, 32(2):108–129.
Sonka, M., Hlavac, V., and Boyle, R. (2014). Image
Processing, Analysis, and Machine Vision. Cengage
Learning.
Yang, Y., Miao, C., Li, X., and Mei, X. (2014). On-line con-
veyor belts inspection based on machine vision. Optik,
125(19):5803–5807.
Yao, R., Qi, P., Hua, D., Zhang, X., Lu, H., and Liu, X.
(2023). A foreign object detection method for belt
conveyors based on an improved yolox model. Tech-
nologies, 11(5).
Zhang, B., Huang, W., Li, J., Zhao, C., Fan, S., Wu, J., and
Liu, C. (2014). Principles, developments and appli-
cations of computer vision for external quality inspec-
tion of fruits and vegetables: A review. Food Research
International, 62:326–343.
ICEIS 2025 - 27th International Conference on Enterprise Information Systems
880
