
Reinforcement Learning-Enhanced Procedural Generation for Dynamic
Narrative-Driven AR Experiences
Aniruddha Srinivas Joshi
a
Independent Researcher, University of California, Santa Cruz, U.S.A.
Keywords:
Procedural Content Generation, Artificial Intelligence, Reinforcement Learning, Augmented Reality,
Interactive Environments, Narrative-Driven Games, Mobile AR, Real-Time Generation.
Abstract:
Procedural Content Generation (PCG) is widely used to create scalable and diverse environments in games.
However, existing methods, such as the Wave Function Collapse (WFC) algorithm, are often limited to static
scenarios and lack the adaptability required for dynamic, narrative-driven applications, particularly in aug-
mented reality (AR) games. This paper presents a reinforcement learning-enhanced WFC framework de-
signed for mobile AR environments. By integrating environment-specific rules and dynamic tile weight ad-
justments informed by reinforcement learning (RL), the proposed method generates maps that are both con-
textually coherent and responsive to gameplay needs. Comparative evaluations and user studies demonstrate
that the framework achieves superior map quality and delivers immersive experiences, making it well-suited
for narrative-driven AR games. Additionally, the method holds promise for broader applications in education,
simulation training, and immersive extended reality (XR) experiences, where dynamic and adaptive environ-
ments are critical.
1 INTRODUCTION
Procedural generation has become a cornerstone in
the creation of diverse and scalable environments for
games, enabling automated generation of complex
layouts with minimal manual intervention. Although
widely used in traditional gaming, its application in
augmented reality (AR) remains limited, particularly
in scenarios where environments need to dynamically
adapt to gameplay narratives or physical surround-
ings. The Wave Function Collapse (WFC) algorithm
(Gumin, 2016), known for generating cohesive lay-
outs through adjacency constraints, has been effective
in creating static maps. However, it does not inher-
ently address the challenges posed by narrative-driven
experiences, where maps must align with evolving
storylines and diverse contextual needs.
In this work, we extend the WFC algorithm to bet-
ter serve the needs of narrative-driven AR games. By
introducing environment-specific rules, our method
tailors map generation to diverse settings, such as ur-
ban grids, open spaces, and dense terrains. These
rules govern the placement of paths and features, en-
suring maps are both visually coherent and themati-
cally appropriate. To enhance adaptability, reinforce-
a
https://orcid.org/0000-0002-1989-7597
ment learning (RL) refines generation decisions dy-
namically, adapting layouts to diverse gameplay re-
quirements. Additionally, AR-specific features sup-
port real-time interactivity, enabling users to dynami-
cally adjust maps to evolving gameplay narratives.
This approach bridges the gap between static
procedural generation and the dynamic needs of
narrative-driven AR games. By combining algorith-
mic enhancements with tools for real-time modifica-
tion, our method delivers adaptive environments that
enhance storytelling and gameplay. Beyond games,
the framework can be applied to AR educational
tools, simulation training, and other immersive expe-
riences, offering a novel and practical advancement in
state-of-the-art procedural content generation (PCG)
methods.
To this end, this study addresses two primary
research questions. Firstly, it evaluates how RL-
enhanced WFC compares to traditional PCG meth-
ods in supporting the needs of narrative-driven aug-
mented reality experiences. Secondly, it examines
how the proposed method improves user experience
by enabling dynamic, coherent, and immersive envi-
ronments in narrative-driven AR games.
Joshi, A. S.
Reinforcement Learning-Enhanced Procedural Generation for Dynamic Narrative-Driven AR Experiences.
DOI: 10.5220/0013373200003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 385-397
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
385

2 RELATED WORKS
In the realm of interactive environments, procedural
generation and machine learning (ML) have emerged
as transformative technologies that enable the cre-
ation of dynamic and richly detailed content. This
section delves into the evolution of these technologies
from their foundational use in game development to
their sophisticated integration within augmented real-
ity systems. We examine how traditional procedural
generation methods have been enhanced by learning
algorithms to address the complexities of modern ap-
plications. The discussion underscores the need for
more adaptable and context-aware generation meth-
ods, especially for enhancing user experiences in AR,
virtual reality (VR), and extended reality (XR) envi-
ronments, setting the stage for our proposed method
designed to address these critical challenges.
2.1 Procedural Generation in Games
Procedural generation techniques have long been
foundational for creating diverse and scalable con-
tent in games. One of the earliest techniques, Binary
Space Partitioning (BSP), introduced a method to re-
cursively divide space into convex sets, enabling ef-
ficient rendering and collision detection. Originally
designed to solve the hidden surface problem (Fuchs
et al., 1980), BSP has since been adapted for gen-
erating structured layouts, such as dungeon levels,
in modern games. Noise-based methods like Per-
lin Noise (Perlin, 1985) and Simplex Noise improve
naturalistic terrain generation, with Simplex Noise
addressing computational inefficiencies and reducing
artifacts. Cellular Automata (Johnson et al., 2010) is
another widely used approach for simulating organic
structures such as caves or forests, evolving systems
over time.
The Wave Function Collapse algorithm (Gumin,
2016) builds on earlier techniques for tile-based map
generation. Notably, it shares significant similari-
ties with the Model Synthesis algorithm (Merrell and
Manocha, 2011). Model Synthesis differs in its ap-
proach to cell selection and its ability to modify the
model in smaller blocks, which enhances its perfor-
mance for generating larger and more complex out-
puts. A comparative analysis highlights their concep-
tual overlap and differences in implementation (Mer-
rell, 2021). Unlike earlier techniques, WFC excels
in maintaining structural coherence. However, it re-
mains static in nature and lacks the ability to adapt
dynamically to gameplay or narrative contexts, high-
lighting the need for more flexible and context-aware
procedural generation methods, especially for inter-
active applications like augmented reality.
2.2 Machine Learning in Procedural
Generation
Machine learning has greatly expanded the possibili-
ties of procedural content generation by enabling sys-
tems to adaptively generate content based on learned
patterns. Methods like Generative Adversarial Net-
works (GANs) and Variational Autoencoders (VAEs)
(Liu et al., 2021) are commonly used to create high-
quality game assets, including levels and textures.
These approaches introduce flexibility and adaptabil-
ity, enhancing traditional procedural content genera-
tion (PCG) techniques.
RL has also shown promise for procedural tasks
requiring sequential decision-making. For instance,
RL-based frameworks (Khalifa et al., 2020) demon-
strate how RL agents can generate game levels by
framing level design as a Markov Decision Process
(MDP). Similarly, recent work highlights RL’s ability
to balance quality, diversity, and playability in level
generation (Nam et al., 2024). Despite these advance-
ments, ML-based methods are often applied to 2D
or platformer games and have yet to be fully inte-
grated into augmented reality or interactive 3D envi-
ronments.
2.3 Procedural Generation in
Augmented Reality
Procedural Content Generation has also been applied
in augmented reality to enhance user interaction by
dynamically adapting virtual content to physical en-
vironments. Recent work presents a pipeline for inte-
grating pre-existing 3D scenes into AR environments,
minimizing manual adjustments and ensuring align-
ment with physical spaces (Caetano and Sra, 2022).
Similarly, PCG has been used to tailor AR game lev-
els to the player’s surroundings, dynamically adjust-
ing elements like layout and difficulty to leverage
physical affordances (Azad et al., 2021).
While these studies illustrate the potential of PCG
in AR, they often focus on predefined or static con-
tent and rarely explore dynamic procedural generation
tailored to narrative-driven gameplay. This work ad-
dresses these gaps by introducing adaptive PCG tech-
niques for dynamically generating AR maps aligned
with both narrative and gameplay needs, enabling
real-time interactivity and customization.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
386

2.4 AR/VR/XR in Narrative Games
AR, VR, and XR technologies have increasingly been
used to create immersive environments for narrative-
driven games. Research demonstrates how spatial
interactivity can enhance storytelling by embedding
narratives into physical spaces, providing players with
unique, location-aware experiences (Viana and Naka-
mura, 2014). Similarly, mobile AR studies examine
the challenges of balancing user freedom with narra-
tive control, highlighting AR’s potential for support-
ing interactive storytelling (Nam, 2015).
Although these works showcase AR and XR’s
strengths in narrative gaming, they often rely on man-
ually designed environments, limiting scalability and
adaptability. Few approaches incorporate procedural
generation to dynamically align narratives with gen-
erated virtual spaces. This work builds on these foun-
dations by integrating PCG into AR-specific features,
enabling the dynamic creation of interactive environ-
ments that evolve alongside narrative-driven game-
play.
3 METHOD
In this section, we elucidate the proposed approach,
which integrates reinforcement learning with the
WFC algorithm (Gumin, 2016) to procedurally gen-
erate grid-based, immersive 3D maps in augmented
reality for narrative-driven games. The RL-enhanced
WFC method builds on the foundational WFC algo-
rithm, originally designed for tile-based map genera-
tion using adjacency constraints. Our approach incor-
porates biome-specific constraints and reinforcement
learning to optimize the generation process, ensuring
biome coherence and enhancing path layouts.
We focus on three distinct biomes, each with
unique layout and art styles:
• City: A structured environment with continu-
ous paths including pathways and buildings. De-
signed for interconnected urban settings that facil-
itate navigation.
• Desert: A sparse environment characterized by
open areas and minimal impassable tiles such as
boulders and cacti.
• Forest: A natural setting featuring paths between
dense obstacles like trees and rocks, interspersed
with open clearings.
Figure 1 shows examples of each biome generated
as a 10×10 grid tabletop map in AR. These biome-
specific configurations influence the RL-enhanced
WFC algorithm by defining tile types, adjacency
Figure 1: Real-time screen capture of 10×10 grids for City,
Desert, and Forest biomes.
rules, and path continuity, allowing the generated ter-
rain to align with the intended narrative and gameplay.
We have designed our approach to generate a map
in Augmented Reality for the narrative game Dun-
geons and Dragons (D&D) (Wizards of the Coast,
2014). The method includes interactive controls that
enable the Dungeon Master (DM) to modify the gen-
erated AR map in real time. This enhances gameplay
by allowing adjustments that align closely with the
evolving narrative.
3.1 Proposed Procedural Generation
Method
We now present the proposed procedural generation
method aimed at constructing dynamic and interactive
environments. Fundamental to our approach are the
concepts of ’cell’ and ’tile’. A cell is the basic unit of
Reinforcement Learning-Enhanced Procedural Generation for Dynamic Narrative-Driven AR Experiences
387
the grid capable of assuming multiple potential states
known as tile options. A tile represents one of these
options, each defined by unique characteristics such
as type, adjacency rules, and visual representations
(including 3D models). When a cell has a specific tile
option selected, it is said to be ’collapsed’ reducing
its potential states to that single option. Conversely, a
cell with multiple possible tile options remains ’non-
collapsed’ allowing for further decision-making as the
algorithm progresses.
Our method employs the following key input pa-
rameters:
1. Grid dimensions specifying the length and
breadth of the grid.
2. An array of all possible tiles, each detailed with
properties such as adjacency rules, tile type, and
the corresponding 3D model for rendering.
3. A dynamic term from the RL agent (r
RL
) that ad-
justs tile weight calculations to optimize procedu-
ral generation based on gameplay dynamics and
environmental conditions. More details on this are
discussed in Section 3.2.
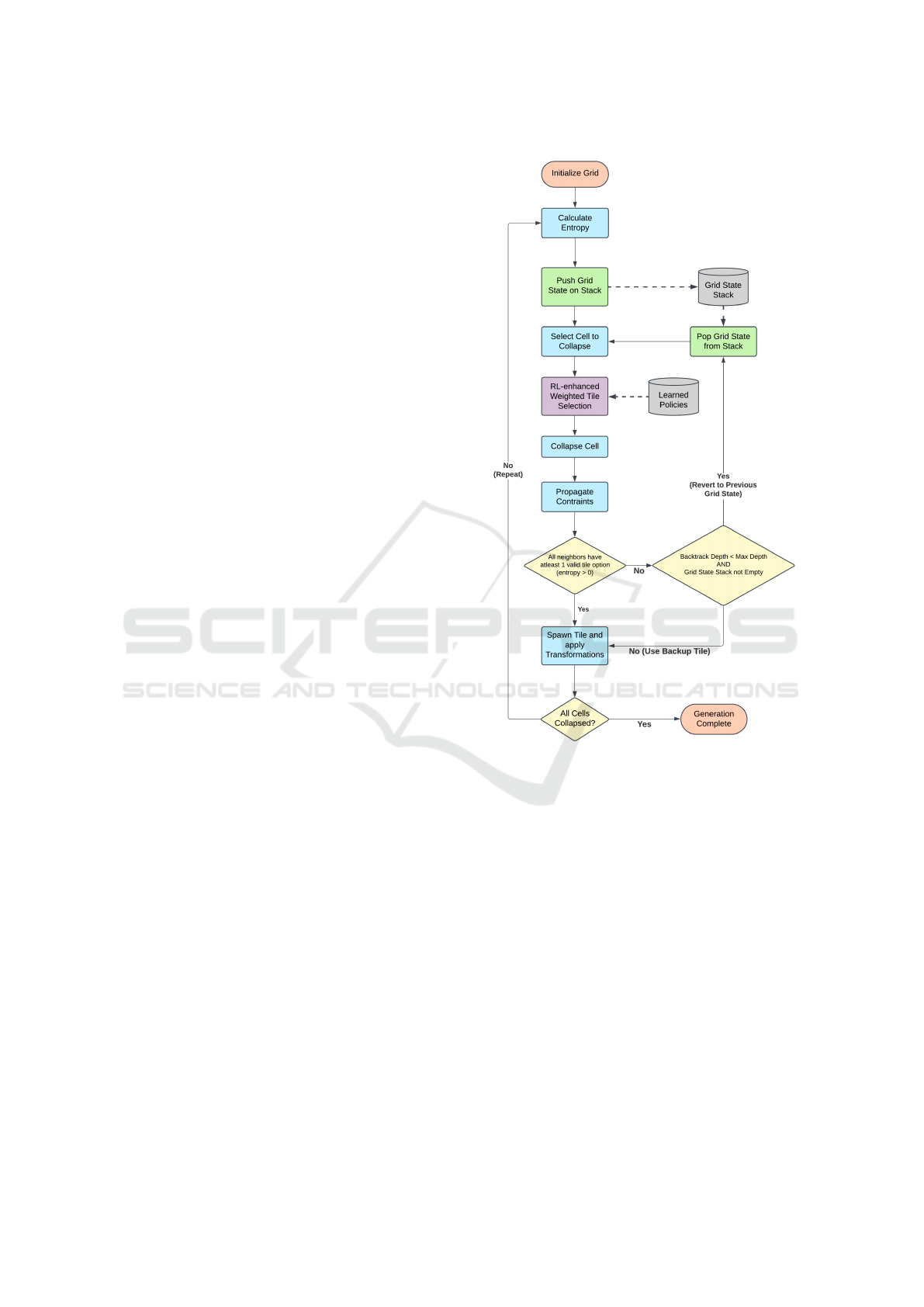
A high-level diagram of the proposed method is
presented in Figure 2. The method implements the
following key steps:
1. Initialize Grid: A grid of empty cells is generated
based on the specified length and breadth dimen-
sions. Each cell is initialized with all possible tile
options according to the selected biome.
2. Calculate Entropy: For each cell, the entropy is
calculated as the count of valid tile options. The
resulting grid state is pushed onto a stack.
3. Select Cell to Collapse: Cells with lower entropy
are prioritized for collapse. If multiple cells share
the same entropy, one of these cells is picked at
random (this always occurs in the first iteration
where all cells have the same entropy).
4. Select Tile with RL-enchanced Weighted Ran-
domness: For the selected cell, a tile option is
chosen based on weighted randomness. The cal-
culation of these tile weights is detailed in Sec-
tion 3.1.1, while the integration of RL to refine
tile selection is described in Section 3.2.
5. Collapse the Cell: The selected cell is collapsed
to its chosen tile, reducing its possible states to
just that tile.
6. Propagate Constraints: After the collapse,
neighboring cells are updated to remove any tile
options that conflict with the collapsed tile’s ad-
jacency constraints. The neighborhood includes
the cells directly up, down, left, and right of the
Figure 2: High-level diagram of the proposed method.
collapsed cell, maintaining consistency with tra-
ditional WFC neighborhood rules. Path layout
strategies as detailed in 3.1.2 are applied here to
guide path connectivity.
7. Backtrack if Necessary: While updating neigh-
boring cells tile options, if any neighboring cell
has no valid tile options remaining (i.e., entropy
= 0), the algorithm reverts to a previous grid
state saved on stack and attempts a different tile
configuration. Backtracking is tracked using a
depth counter, and if the depth reaches a prede-
fined maximum limit (Max Depth) or the stack is
empty, a default tile is used to resolve the dead-
lock and allow the algorithm to proceed.
8. Spawn and Apply Transformations: The tile
content is instantiated at the corresponding cell lo-
cation. Transformations (rotation, symmetry, and
scaling) are applied to the spawned tile to add vi-
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
388

sual variety while maintaining coherence.
9. Repeat Until Completion: Steps 2 to 8 are re-
peated until every cell in the grid is collapsed,
completing the map.
3.1.1 Tile Weight Calculation and Selection
As we begin this section, it is crucial to acknowledge
that Equation 1 has been extended to incorporate con-
tributions from the RL agent. A detailed discussion
on this topic will follow in Section 3.2. Our current
focus will be on the base implementation of weighted
random selection.
Each cell in the grid has a list of possible tile
options, and each tile option is assigned a weight
based on how well it aligns with its neighboring cells.
Tiles that fit better with neighbors are assigned higher
weights to increase their likelihood of selection.
If a given cell has a total of T tile options, then the
weight for the i
th
tile option denoted w
i
is calculated
as follows:
w
i
= w
0
+
∑
n∈N
s
n
(1)
where:
• w
0
is the base weight (w
0
= 1.0),
• N represents the neighboring cells,
• s
n
is the adjacency score for neighbor cell n:
s
n
=
0, if n is non-collapsed
(i.e., n does not have a tile selected),
1.5, if n has a compatible tile
(i.e., n’s tile adheres to adjacency rules),
0.5, if n has an incompatible tile
(i.e., n’s tile violates adjacency rules)
After calculating weights for T tile options, a
weighted random selection is performed:
1. Compute the total weight W =
∑
T
w
i
for all tile
options.
2. Generate a random number r ∈ [0, W ].
3. Select the tile with smallest index j such that
∑
j
k=1
w
k
≥ r.
This tile selection method ensures that tiles with
higher weights (those that fit well with their neigh-
bors) are more likely to be chosen, while still allowing
some randomness in choice.
3.1.2 Path Layout Strategies
The proposed method assumes two types of tiles:
1. Path tiles: These are tiles that players can traverse
(e.g., roads, grass).
2. Impassable tiles: These are tiles that cannot be tra-
versed and block movement (e.g., boulders, trees).
Depending on the selected biome, the path layout
can be continuous (e.g., city biome) or sparse (e.g.,
forest biome). These layouts are created by applying
different path constraint strategies during the propa-
gation step.
Continuous Path Layouts: Strict adjacency con-
straints are enforced to ensure path connectivity.
Once a path tile is selected, these constraints are en-
forced during propagation:
• Filtering Valid Tile Options: For each neighbor-
ing cell, valid tile options are constrained to in-
clude only those that can connect to the path tile.
This prioritization ensures that most neighboring
cells favor path-compatible tiles, maintaining con-
tinuous connectivity.
• Inclusion of Impassable Tiles: Impassable tiles
are only considered valid if they satisfy specific
adjacency rules, such as requiring at least one
adjacent path tile to preserve navigability. This
approach allows for the integration of buildings,
walls, or other impassable elements without dis-
rupting the functionality of the map.
• Weighted Randomness Favors Continuity of
Path: During tile selection, weighted randomness
biases selection toward path tiles while allowing
occasional placement of impassable tiles for di-
versity.
Sparse Path Layouts: Relaxed adjacency con-
straints are used, allowing paths to be more scattered
with impassable tiles (e.g., trees, rocks) interspersed
among path tiles, creating a more open, fragmented
layout. This is achieved through the following mech-
anisms:
• Random Application of Continuous Path Con-
straints: When a path tile is placed, for each
neighboring cell, there is a 50% chance of apply-
ing continuous path constraints as previously de-
scribed.
• Flexible Tile Options: If continuous path con-
straints are not applied, the neighboring cell re-
tains a wider range of valid tile options, includ-
ing path tiles and impassable tiles. This promotes
more randomness and contributes to the sparse
layout’s fragmented structure.
Reinforcement Learning-Enhanced Procedural Generation for Dynamic Narrative-Driven AR Experiences
389

• Weighted Randomness Favors Variety: In
sparse layouts, weighted randomness slightly fa-
vors impassable tiles because they are more nu-
merous than path tiles. This leads to more scat-
tered obstructions and open spaces.
By introducing gaps in connectivity and balanc-
ing paths with impassable tiles, the resulting map
achieves a more natural and unstructured appearance.
This layout aligns with the aesthetics of open environ-
ments such as forests and deserts.
3.2 Reinforcement Learning for
Procedural Map Generation
RL is integrated to dynamically adjust tile weights
in the WFC algorithm. By tailoring tile weights
to biome-specific characteristics, this approach im-
proves the coherence, completeness, and efficiency of
map generation. The Proximal Policy Optimization
(PPO) algorithm is chosen for its stability and abil-
ity to train effective policies while enabling moderate
exploration (Schulman et al., 2017).
PPO uses a clipped surrogate objective function to
stabilize policy updates:
L
CLIP
(θ) = E
t
min
r
t
(θ)
ˆ
A
t
, clip(r
t
(θ), 1 − ε, 1 + ε)
ˆ
A
t
(2)
where:
• θ represents the policy network parameters
• t is the timestep
• r
t
(θ) is the probability ratio between new and old
policies at t
•
ˆ
A
t
is the advantage estimate at t, quantifying the
relative benefit of actions
• ε is the clipping threshold to limit policy update
ratios
The PPO algorithm is used to train an RL agent
to learn a policy that adjusts tile weights dynamically
during map generation. Through episodic interactions
with the WFC system, the agent observes the cur-
rent grid state, biome type, and layout requirements
to determine optimal adjustments. The policy learned
by the agent is designed to maximize cumulative re-
wards, encouraging map generation that is efficient,
complete, and biome-coherent.
Building on the baseline tile weight formula de-
fined in Equation 1, the updated formula incorporates
a dynamic adjustment term, r
RL
, derived from the RL
agent’s policy:
w
i
= w
0
+
∑
n∈N
s
n
+ r
RL
(3)
where r
RL
accounts for real-time adjustments guided
by the RL agent’s policy.
This updated formula enables real-time tile weight
adaptation, allowing the system to account for biome-
specific variations while maintaining coherence and
efficiency during map generation.
3.2.1 Agent Training
Agent training proceeds in episodes, where each
episode represents a single map generation task. At
the beginning of each episode, the WFC system ini-
tializes an empty grid and the agent receives an ob-
servation. This observation encodes the current grid
state as a binary representation of collapsed and un-
collapsed cells, the biome type as a one-hot vector
(e.g., Forest, City, or Desert), and the layout type as a
binary value indicating sparse or continuous layouts.
The agent outputs a continuous adjustment value
(RL Score), which dynamically modifies tile weights
during map generation. The WFC algorithm uses
these adjusted weights to generate a map, linking the
agent’s actions to the resulting layout. After map gen-
eration, the agent evaluates the map’s quality using a
reward function, which comprises three components:
1. Completeness: Rewards fully collapsed grids and
penalizes incomplete or invalid configurations.
This is formally defined as:
C =
+1, if all cells are collapsed and valid,
−0.5, if some cells remain uncollapsed,
−1, if grid contains invalid configurations
(4)
2. Biome Coherence: Rewards alignment with
biome-specific characteristics, such as sparse lay-
outs for Forests, continuous paths for Cities, and
open spaces for Deserts. It is calculated as:
B =
∑
T
j=1
b
j
T
(5)
where b
j
= 1 if the j
th
tile adheres to biome-
specific adjacency constraints, and T is the total
number of tiles.
3. Efficiency: Rewards faster map generation and
penalizes retries or backtracking. Efficiency is de-
fined as:
E = k
1
· (S
max
− S
used
) − k
2
· B (6)
where:
• k
1
= 0.2 is the reward factor for minimizing
steps
• k
2
= 0.1 is the penalty factor for backtracking
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
390

• S
max
is the maximum allowed steps for map
generation
• S
used
is the number of steps taken to complete
the grid
• B is the number of backtracking operations per-
formed
The total reward for an episode is given by:
R = C + B + E (7)
The agent receives this cumulative reward, which
guides its policy updates. PPO adjusts the policy pa-
rameters to maximize future rewards, reinforcing ben-
eficial actions while discouraging suboptimal ones.
The clipped objective ensures incremental updates,
maintaining training stability and preventing large
policy shifts. Over successive episodes, the agent
refines its policy, learning to associate specific tile
weight adjustments with desirable map characteris-
tics. By the end of training, the policy generalizes
effectively across biomes, enabling adaptability to di-
verse map generation scenarios.
3.2.2 Policy Deployment
After training, the policy learned by the RL agent is
deployed in inference mode i.e. it applies the learned
adjustments to make decisions without further up-
dates. During deployment, the system uses the policy
to dynamically adjust tile weights based on the biome
type and grid state in real-time. These adjustments en-
sure that the generated maps are coherent, complete,
and efficient, aligning with the specific requirements
of each biome.
3.3 Mobile AR Implementation
The Augmented Reality mobile app was developed
using Unity’s AR Foundation API (Unity Technolo-
gies, 2023), which provides built-in plane detection
to identify horizontal surfaces, such as tabletops, as
valid spaces for placing virtual elements. Detected
surfaces are visually highlighted to indicate valid
placement areas, offering clear feedback to the user.
Once a surface is confirmed through a screen tap, a
raycast is performed from the tap position to the plane
surface. The raycast ensures accurate placement of
the procedural grid map, which is generated based on
the specified dimensions and biome, and then aligned
with the detected surface for an immersive and inter-
active experience.
To ensure the method is optimized for mobile
devices, grid sizes were limited to a maximum of
15×15. This constraint prevents excessive computa-
tional overhead while also aligning with the physi-
cal constraints of typical tabletop surfaces, ensuring
that the generated maps remain practical and immer-
sive for mobile AR. Low-poly assets were used to
reduce rendering demands, preserving visual fidelity
while ensuring efficient performance. Additionally,
tile backtracking depth during map generation was
restricted to minimize unnecessary computations, en-
hancing responsiveness.
By integrating robust AR placement mechanisms
with mobile-specific optimizations, the framework
delivers detailed, biome-specific maps while main-
taining real-time interactivity. These strategies en-
sure that mobile AR applications meet the needs of
narrative-driven gameplay while remaining efficient
and responsive.
3.4 Interactive Narrative Control
The proposed method provides dynamic narrative
controls for real-time customization of procedurally
generated AR environments. These interactive con-
trols give DMs the ability to adapt the map to align
with the evolving narrative. This allows the envi-
ronment to respond to key narrative events and unex-
pected player actions, bridging the gap between pro-
cedural generation and narrative-driven gameplay.
The key interactive features are:
1. Biome and Grid Size Selection: The DM can
select the biome (City, Desert, or Forest) and de-
fine grid dimensions at the start of map genera-
tion. This ensures the environment aligns with the
story’s thematic and spatial requirements.
2. Clearing Paths: Hidden routes can be revealed
to guide players toward new objectives or advance
the narrative. For instance, uncovering a passage
after solving a puzzle ensures the story progresses
naturally while encouraging exploration.
3. Blocking Paths: Existing routes can be closed off
to simulate story-driven events or introduce envi-
ronmental challenges. Examples include blocking
a path to represent a cave-in or using a locked gate
to redirect players toward specific objectives.
4. Placing Special Objects: Narrative-critical ob-
jects such as traps, treasure chests, keys, or locked
doors can be dynamically added to the map.
These objects embed story-specific interactions
into the environment, such as requiring players to
locate a key to progress or triggering traps during
pivotal moments.
The integration of these interactive controls into the
procedural generation framework establishes a strong
connection between the narrative and the environ-
ment. Unlike traditional PCG methods that produce
Reinforcement Learning-Enhanced Procedural Generation for Dynamic Narrative-Driven AR Experiences
391

static maps, the proposed framework enables real-
time adaptability, transforming the environment from
a passive backdrop into an active participant in the
storytelling process. Figure 3 illustrates these dy-
namic controls.
Figure 3: Real-time screen captures showcasing dynamic
controls offered by the proposed method.
By allowing DMs to clear paths, block routes,
and place narrative-critical objects dynamically, the
framework empowers them to align the environment
with both predefined story arcs and emergent player-
driven scenarios. For example, uncovering a hidden
path can guide players toward key objectives, while
introducing obstacles or rewards in response to player
actions creates unique, unplanned narrative moments.
This flexibility ensures that the environment remains
engaging and contextually relevant.
Through this combination of real-time customiza-
tion and procedural generation, the proposed method
supports immersive, story-driven applications in AR
gaming and other interactive environments. It demon-
strates the potential of PCG to move beyond static
content creation, enabling richer and more dynamic
storytelling experiences.
4 EXPERIMENTAL EVALUATION
In this section, we present the experimental evaluation
conducted to validate the effectiveness and efficiency
of our proposed procedural generation method. The
evaluation includes the training of the RL agent, a
user study assessing interaction quality with AR ap-
plications, and a performance analysis comparing our
method to baseline approaches. Together, these eval-
uations provide a comprehensive assessment of the
proposed method’s application in generating procedu-
ral content for interactive AR environments.
4.1 RL Agent Training
The RL agent was trained in Unity using ML-Agents
with PyTorch for policy updates. Training was con-
ducted on a Windows workstation equipped with an
AMD Ryzen 9 5900X 12-Core processor and an
NVIDIA RTX 4070 Super GPU. Unity’s simulation
environment handled procedural map generation dur-
ing episodic interactions with the agent, providing the
basis for policy learning.
The agent was trained using 15×15 grids, as this
is the maximum grid size supported by the mobile ap-
plication. Each biome (City, Forest, and Desert) was
trained for 50,000 episodes, a value chosen to provide
enough iterations for the policy to generalize across
diverse map generation scenarios.
Training parameters included a batch size of 64,
a learning rate of 3.0 × 10
−4
, a buffer size of 2048,
a discount factor (γ) of 0.99, and a clipping threshold
(ε) of 0.2. Observations consisted of biome-specific
inputs and the grid state (collapsed/uncollapsed cells).
A single continuous action r
RL
dynamically adjusted
tile weights during training.
The reward function as defined in Section 3.2.1
guided the agent’s policy updates by balancing Com-
pleteness, Biome Coherence, and Efficiency. For the
Efficiency component, k
1
= 0.2 and k
2
= 0.1 were se-
lected to encourage faster map generation while pe-
nalizing excessive backtracking. These values were
chosen to balance the trade-offs observed during ini-
tial training runs. Higher backtracking penalties
caused overly cautious behavior, while lower penal-
ties made retries less impactful.
By the end of training, the agent effectively
learned to adjust tile weights dynamically, enabling
the generation of coherent, complete, and efficient
maps across diverse biomes.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
392
4.2 User Study
A user study was conducted with 28 participants with
a diverse range of D&D experience levels, as shown
in Table 1. Each participant interacted with three AR
applications, each implementing a different procedu-
ral generation algorithm:
• App 1: Perlin Noise (Perlin, 1985)
• App 2: Cellular Automata (Johnson et al., 2010)
• App 3: Proposed Method
We conducted a statistical power analysis to de-
termine the appropriate sample size for our within-
subjects study. As with prior work in immersive me-
dia (Breves and Schramm, 2021) and (H
¨
ogberg et al.,
2019), we assumed a medium effect size ( f = 0.25), a
significance level of α = 0.05, and a statistical power
of 1 − β = 0.8 (Cohen, 1988). Using G* Power for a
repeated measures ANOVA with three conditions, the
required sample size was calculated to be 28 partici-
pants.
Table 1: Participant Distribution by Years of D&D Experi-
ence.
Experience Level Number of Participants
5+ years 6
3–5 years 6
1–3 years 7
Less than 1 year 9
Participants rated the procedural generation algo-
rithms on key dimensions using a 5-point Likert scale
(1 = Poor, 5 = Excellent). The aggregated results for
these dimensions are shown in Table 2. Questions
asked assessed biome coherence, immersion, usabil-
ity, visual quality, speed, and suitability, focusing on
critical aspects of evaluating procedural content gen-
eration.
Following the presentation of the aggregated re-
sults in Table 2, it is important to note that while
Likert scales are ordinal, the use of means for their
analysis is aligned with common practices in Human-
Computer interaction (HCI) research. This method-
ological choice, as supported by (Kaptein et al., 2010)
helps in providing clear, actionable insights despite
the ordinal nature of the data, especially useful in con-
texts with small sample sizes where robustness and
ease of interpretation are prioritized.
Biome Coherence (Forest, Desert, City) evaluated
the logical structure and realism of generated envi-
ronments, supported by frameworks like (Togelius
et al., 2011) and (Shaker et al., 2016), which em-
phasize alignment with user expectations and natural
archetypes to ensure quality and coherence. Biome
Suitability evaluated alignment with biome-specific
characteristics, such as sparse desert layouts or struc-
tured city grids, supported by frameworks for proce-
dural generation and environmental coherence (Azad
et al., 2021) and (Togelius et al., 2011). Immersion
assessed user engagement, inspired by the Presence
Questionnaire (Witmer and Singer, 1998), while Gen-
eration Speed reflected usability principles from the
System Usability Scale (SUS) (Brooke, 1995). Vi-
sual Quality, adapted from the User Experience Ques-
tionnaire (UEQ) (Laugwitz et al., 2008), measured
aesthetics, and Preferred App captured participants’
overall impressions, commonly used in procedural
content evaluations (Khalifa et al., 2020).
Table 2: User Study Ratings Across Procedural Generation
Methods.
Metric App 1 App 2 App 3
Forest Coherence 4.5 4.0 4.6
Desert Coherence 3.8 3.3 4.4
City Coherence 3.0 4.2 4.7
Immersion 4.1 4.0 4.5
Biome Suitability 3.7 3.8 4.6
Generation Speed 4.7 4.3 3.6
Visual Quality 4.2 4.0 4.7
Preferred App 18% (5) 14% (4) 68% (19)
The following points detail the key observations
from Table 2:
• Perlin Noise (App 1):
– Strong performance in Forest coherence (4.5),
offering natural visuals.
– Weak in City coherence (3.0) due to unrealistic
structure.
• Cellular Automata (App 2):
– Performed well in City coherence (4.2).
– Lowest score in Desert coherence (3.3), strug-
gling with sparse layouts.
• Proposed Method (App 3):
– Rated highest for Forest coherence (4.6),
Desert coherence (4.4), and City coherence
(4.7).
– Participants praised biome-specific realism and
coherence. Figure 4 supports this feedback
with examples of generated environments.
– Slower generation speed (3.6) was noted as a
drawback.
• Overall:
– 68% of participants preferred App 3, while
18% chose App 1 and 14% chose App 2.
Reinforcement Learning-Enhanced Procedural Generation for Dynamic Narrative-Driven AR Experiences
393

Figure 4: Close up real-time screen captures of environ-
ments generated by the proposed method.
To evaluate the broader usability and suitability of
the proposed method (App 3) for narrative games like
Dungeons & Dragons, participants rated additional
aspects beyond the key evaluation metrics using a 5-
point Likert scale (1 = Poor, 5 = Excellent). Since the
user interface remained identical across apps, ques-
tions on Ease of Use, Better than Traditional Map-
Building Methods, Likelihood of Future Use, Satis-
faction with Visual Quality, and Engagement in Cus-
tomization were asked only once for the proposed
method. The results of these ratings are summarized
in Table 3. These additional questions were informed
by the System Usability Scale (Brooke, 1995) and the
Presence Questionnaire (Witmer and Singer, 1998)
to target broader usability and narrative-driven utility.
This design ensured a focused evaluation of the algo-
rithms, balancing comprehensiveness and usability to
meet the study’s objectives.
Table 3: Usability Ratings for the Proposed Method.
Aspect Rating (Mean)
Ease of Use 4.1
Better than Traditional Methods 4.0
Likelihood of Future Use 4.0
Engagement in Customization 3.8
4.3 Computational Performance
Analysis
We assess the computational performance of our pro-
posed procedural generation method, focusing on its
efficiency relative to the baseline techniques used in
the user study. This evaluation provides insights into
the method’s practicality for implementation on mo-
bile devices.
Table 4: Computational Performance Metrics for Perlin
Noise.
Biome Grid Size Time (s) Min FPS Avg FPS FPS Recovery (s)
Forest 5×5 = 25 0.534 51.25 54.3075 0.117
10×10 = 100 1.763 52.333 57.644 0.467
15×15 = 225 3.841 53.333 59.106 0.512
Desert 5×5 = 25 0.518 52.667 56.115 0.0833
10×10 = 100 1.753 54 58.129 0.564
15×15 = 225 3.888 50.667 58.671 0.612
City 5×5 = 25 0.478 56 58.859 0.028
10×10 = 100 1.802 51 56.967 0.662
15×15 = 225 3.859 51.667 58.899 0.473
Table 5: Computational Performance Metrics for Cellular
Automata (CA).
Biome Grid Size Time (s) Min FPS Avg FPS FPS Recovery (s)
Forest 5×5 = 25 0.528 51.667 55.333 0.321
10×10 = 100 1.8052 50.2 56.818 0.5838
15×15 = 225 4.07 49 56.894 0.523
Desert 5×5 = 25 0.517 52.667 55.295 0.094
10×10 = 100 1.835 49.25 56.094 0.888
15×15 = 225 3.88 51.333 58.715 0.617
City 5×5 = 25 0.589 47.667 53.103 0.0444
10×10 = 100 1.845 47.333 56.02 0.611
15×15 = 225 3.98 46 57.58 1.234
Table 6: Computational Performance Metrics for Proposed
Method.
Biome Grid Size Time (s) Min FPS Avg FPS FPS Recovery (s)
Forest 5×5 = 25 0.614 47.2 52.346 0.08
10×10 = 100 4.332 16.4 29.6426 2.279
15×15 = 225 24.0454 5.6 14.7964 18.0716
Desert 5×5 = 25 0.5906 48.6 52.962 0.0732
10×10 = 100 4.189 16 31.099 2.0714
15×15 = 225 21.059 5.833 17.522 15.371
City 5×5 = 25 0.709 43.75 49.991 0.075
10×10 = 100 7.592 8.2 22.232 3.477
15×15 = 225 29.98 3.5 12.175 29.61
4.3.1 Experimental Setup and Metrics
The performance of the proposed method was eval-
uated alongside two baseline methods: Perlin Noise
and Cellular Automata. The evaluation was con-
ducted using a Samsung Galaxy S21 with a Snap-
dragon 888 processor and 8 GB of RAM.
Performance was evaluated by measuring the fol-
lowing key metrics:
1. Time Taken: Total time required to generate the
grid map.
2. Minimum FPS: The lowest frame rate recorded
during the generation process.
3. Average FPS: The overall average frame rate
maintained during map generation.
4. FPS Recovery Time: Time taken for the system to
stabilize back to 60 FPS after an FPS drop.
Results were recorded for grid sizes of 5×5,
10×10, and 15×15 across each biome with each re-
sult averaged over 10 trials. These results are shown
in Tables 4, 5, and 6.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
394

4.3.2 Observations
The following observations were made from the com-
parative results:
• Perlin Noise was the fastest method across
all biomes with Cellular Automata performing
slightly slower and the proposed method requir-
ing significantly more time, particularly for larger
grid sizes.
• Performance consistently degraded with increas-
ing grid size across all methods with longer gener-
ation times, lower minimum FPS, and prolonged
FPS recovery times.
• Desert biome exhibited consistently better perfor-
mance with shorter generation times and higher
FPS across methods while the Forest and City
biomes were more computationally demanding.
4.4 Results
The computational performance and user feedback
evaluations reveal key trade-offs between quality and
efficiency for the proposed method compared to Per-
lin Noise and Cellular Automata in mobile AR envi-
ronments.
The evaluation of generation times as shown
in Tables 4, 5 and 6, demonstrated that the pro-
posed method required significantly longer times
across all grid sizes and biomes. While slower, the
proposed method produced highly detailed, biome-
specific maps that were rated superior in user stud-
ies, reinforcing its value for applications where qual-
ity and coherence are critical.
Performance trends across grid sizes showed that
larger grids led to longer generation times, reduced
minimum FPS and increased FPS recovery times
across all methods. The Desert biome consistently
performed better with shorter generation times and
higher FPS values while the City and Forest biomes
posed greater computational challenges due to their
complexity. Despite these challenges, the proposed
method achieved significantly higher map coherence
and quality across all biomes, particularly for more
intricate layouts in the City environment.
The user study results validated the proposed
method’s advantages, with participants consistently
rating its maps as more immersive, visually coher-
ent, and narrative-friendly than those from baseline
methods. These findings highlight its suitability for
narrative-driven AR applications where immersion
and contextual alignment take precedence over speed.
While WFC without RL was not explicitly evalu-
ated in this study, future work could include such
a comparison to further quantify the RL-enhanced
framework’s contributions to coherence and adapt-
ability. Moreover, the results confirm that the research
questions posed in the Introduction were effectively
addressed. Specifically, the proposed method sup-
ports narrative-driven AR applications by delivering
immersive and coherent environments, while offer-
ing performance comparable to traditional PCG tech-
niques in this context.
Although the proposed method’s computational
demands are higher, they remain acceptable for mo-
bile AR applications, especially for narrative-driven
scenarios prioritizing immersion over speed. Poten-
tial optimizations, such as asynchronous map genera-
tion in the background could mitigate FPS drops and
reduce perceived delays. Device specifications also
play a significant role, with lower-spec devices facing
greater challenges when handling larger grids.
Overall, the findings from both the user study
and computational evaluation demonstrate that the re-
search questions posed at the beginning of this work
were effectively addressed. The proposed method
delivers immersive and coherent environments for
narrative-driven AR applications, while achieving
a balance between computational demands and the
quality required for such contexts.
5 CONCLUSIONS
In this work, a reinforcement learning-enhanced
wave function collapse based procedural generation
method was developed and evaluated for mobile
AR environments. The proposed method demon-
strated superior coherence and map quality, making
it particularly well-suited for narrative-driven games
where immersion and environmental detail are crit-
ical. While the method introduces higher compu-
tational demands compared to baseline approaches,
user studies consistently rated the resulting maps sig-
nificantly higher, highlighting its effectiveness in de-
livering high-quality and contextually appropriate en-
vironments.
The performance evaluation revealed trade-offs
between computational performance and map qual-
ity, influenced by the structural intricacy of the gener-
ated environments. Despite slower performance, the
generation times of the proposed method remain ac-
ceptable for mobile AR applications. Adapting the
method for next-generation XR devices with greater
computational power could further enhance its per-
formance and scalability. Techniques such as asyn-
chronous map generation could reduce perceived de-
lays and improve responsiveness, making the method
Reinforcement Learning-Enhanced Procedural Generation for Dynamic Narrative-Driven AR Experiences
395

more suitable for real-time or near-real-time applica-
tions.
Future work could explore AI-driven techniques
to refine generated tiles at runtime, enabling more dy-
namic and interactive maps. In addition, AI could
be utilized to adjust neighboring tiles in response to
user modifications, allowing the environment to adapt
fluidly and better align with narrative developments.
Additional research may also extend the method to
support more intricate environments, optimize per-
formance for larger grids, or evaluate its application
in broader AR or VR scenarios beyond narrative-
driven games. These advancements could establish
the method as a versatile tool for procedural content
generation in immersive environments.
In conclusion, this work not only addresses the
research questions posed at the beginning but also
demonstrates the potential of combining RL with pro-
cedural generation techniques to meet the unique de-
mands of narrative-driven AR environments. By bal-
ancing computational trade-offs with user experience,
it lays a strong foundation for future innovations in
AR content generation and immersive technologies.
ACKNOWLEDGEMENTS
I would like to thank Sai Siddartha Maram from the
University of California, Santa Cruz for his valuable
insights and support during this work.
REFERENCES
Azad, S., Saldanha, C., Gan, C.-H., and Riedl, M. (2021).
Procedural level generation for augmented reality
games. Proceedings of the AAAI Conference on Ar-
tificial Intelligence and Interactive Digital Entertain-
ment, 12(1):247–249.
Breves, P. and Schramm, H. (2021). Bridging psychologi-
cal distance: The impact of immersive media on dis-
tant and proximal environmental issues. Computers in
Human Behavior, 115:106606.
Brooke, J. (1995). Sus: A quick and dirty usability scale.
Usability Evaluation in Industry, 189:—.
Caetano, A. and Sra, M. (2022). Arfy: A pipeline for adapt-
ing 3d scenes to augmented reality. In Adjunct Pro-
ceedings of the 35th Annual ACM Symposium on User
Interface Software and Technology, UIST ’22, pages
1–3. ACM.
Cohen, J. (1988). Statistical Power Analysis for the Behav-
ioral Sciences. Routledge, 2nd edition.
Fuchs, H., Kedem, Z. M., and Naylor, B. F. (1980). On
visible surface generation by a priori tree structures.
In Proceedings of the 7th Annual Conference on
Computer Graphics and Interactive Techniques, SIG-
GRAPH ’80, pages 124–133.
Gumin, M. (2016). Wave function collapse algorithm.
GitHub Repository.
H
¨
ogberg, J., Hamari, J., and W
¨
astlund, E. (2019). Game-
ful experience questionnaire (gamefulquest): An in-
strument for measuring the perceived gamefulness of
system use. User Modeling and User-Adapted Inter-
action, 29(3):619–660.
Johnson, L., Yannakakis, G. N., and Togelius, J. (2010).
Cellular automata for real-time generation of infinite
cave levels. In Proceedings of the 2010 Workshop on
Procedural Content Generation in Games, New York,
NY, USA. Association for Computing Machinery.
Kaptein, M. C., Nass, C., and Markopoulos, P. (2010).
Powerful and consistent analysis of likert-type rating
scales. In Proceedings of the SIGCHI Conference on
Human Factors in Computing Systems, pages 2391–
2394, New York, NY, USA. Association for Comput-
ing Machinery.
Khalifa, A., Bontrager, P., Earle, S., and Togelius, J. (2020).
Pcgrl: Procedural content generation via reinforce-
ment learning. In Proceedings of the Sixteenth AAAI
Conference on Artificial Intelligence and Interactive
Digital Entertainment. AAAI Press.
Laugwitz, B., Held, T., and Schrepp, M. (2008). Construc-
tion and evaluation of a user experience questionnaire.
In USAB 2008, volume 5298 of Lecture Notes in Com-
puter Science, pages 63–76.
Liu, J., Snodgrass, S., Khalifa, A., Risi, S., Yannakakis,
G. N., and Togelius, J. (2021). Deep learning for pro-
cedural content generation. Neural Computing and
Applications, 33(1):19–37.
Merrell, P. (2021). Comparing model synthesis and wave
function collapse.
Merrell, P. and Manocha, D. (2011). Model synthesis:
A general procedural modeling algorithm. IEEE
Transactions on Visualization and Computer Graph-
ics, 17(6):715–728.
Nam, S., Hsueh, C.-H., Rerkjirattikal, P., and Ikeda, K.
(2024). Using reinforcement learning to generate lev-
els of super mario bros. with quality and diversity.
IEEE Transactions on Games, pages 1–14.
Nam, Y. (2015). Designing interactive narratives for mobile
augmented reality. Cluster Computing, 18(1):309–
320.
Perlin, K. (1985). An image synthesizer. SIGGRAPH Com-
put. Graph., 19(3):287–296.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017). Proximal policy optimization al-
gorithms.
Shaker, N., Togelius, J., and Nelson, M. (2016). Procedural
Content Generation in Games: A Textbook and Sur-
vey. Springer.
Togelius, J., Yannakakis, G. N., Stanley, K. O., and Browne,
C. (2011). Search-based procedural content gen-
eration: A taxonomy and survey. IEEE Transac-
tions on Computational Intelligence and AI in Games,
3(3):172–186.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
396

Unity Technologies (2023). Unity AR Foundation Manual.
Version 6.0.
Viana, B. S. and Nakamura, R. (2014). Immersive inter-
active narratives in augmented reality games. In De-
sign, User Experience, and Usability, volume 8519 of
Lecture Notes in Computer Science, pages 773–781.
Springer.
Witmer, B. G. and Singer, M. J. (1998). Measuring pres-
ence in virtual environments: A presence question-
naire. Presence: Teleoperators and Virtual Environ-
ments, 7(3):225–240.
Wizards of the Coast (2014). Dungeons & Dragons
Player’s Handbook. Wizards of the Coast, Renton,
WA, 5th edition.
Reinforcement Learning-Enhanced Procedural Generation for Dynamic Narrative-Driven AR Experiences
397
