
Energy Consumption Prediction with Uncertainty Quantification for
Electric Truck Operations: A Data-Driven Approach
Rik Litjens
1 a
, R
´
obinson Medina
2 b
, Nikos Avramis
2 c
, Camiel Beckers
2 d
,
Steven Wilkins
2 e
and Mykola Pechenizkiy
1 f
1
Department of Mathematics and Computer Science, Eindhoven University of Technology, Eindhoven, the Netherlands
2
Powertrains Department, TNO, Helmond, the Netherlands
Keywords:
Energy Consumption, Prediction Model, Uncertainty Quantification, Battery Electric Vehicle, Fleet
Management, LSTM.
Abstract:
The adoption of electric trucks in commercial applications is growing due the the adoption of zero-emission
zones in large cities. However, the usage of these trucks shows challenges for fleet managers due to their
limited range and uncertain energy usage. Accurately predicting the energy consumption of these vehicles is
crucial for their optimal usage in commercial applications. This work introduces a novel energy consumption
prediction method for electric trucks, based on a data-driven approach. The approach uses a two-stage Long
Short-Term Memory (LSTM) architecture: the first stage predicts vehicle speed while the second predicts
energy consumption. For the second stage, two updates to the LSTM encoder are proposed. The first im-
proves the energy prediction by splitting the predictions into regenerated and consumed energy, whereas the
second provides a score that quantifies the prediction uncertainty using Student’s t-distribution. Evaluating
the approach using real-world truck-operation data shows that splitting the energy consumption into regener-
ative and consumed components contributes to a 20% reduction of error compared to a state-of-the-art LSTM
model, mainly due to improved prediction accuracy for regenerated energy. Finally, the t-score demonstrates
a 92% reduction of calibration error compared to a Gaussian equivalent. This ensures reliable application in
the design of worst-case planning scenarios, decision thresholds, and probabilistic planning approaches.
1 INTRODUCTION
Governments worldwide are committing to reducing
greenhouse gas emissions and air pollution to pre-
vent climate change and increase living conditions.
A total of 33 countries have pledged to enable 100%
zero-emission medium- and heavy-duty vehicle sales
by 2040 (DriveToZero, 2024). With a 35% increase
in global electric truck sales between 2022 and 2023
and a close to threefold increase within Europe (In-
ternational Energy Agency (IEA), 2024), it is clear
that this is not just a paper reality. In the Nether-
lands, as in many countries worldwide, municipal-
ities have agreed to introduce zero-emission zones
a
https://orcid.org/0000-0003-0674-1435
b
https://orcid.org/0009-0001-2214-6153
c
https://orcid.org/0009-0007-3345-1018
d
https://orcid.org/0000-0002-3383-1092
e
https://orcid.org/0000-0001-9498-2321
f
https://orcid.org/0000-0003-4955-0743
between 2025 and 2030 as part of the 2019 Cli-
mate Agreement (Ministry of Infrastructure and Wa-
ter Management, 2024; Dutch Government, 2019).
The result is that the operation of traditional fossil-
fuel-based transport is partially or fully restricted, in-
creasing the importance of emission-free transporta-
tion.
For large transportation companies, the introduc-
tion of electric medium- to heavy-duty vehicles poses
challenges to fleet managers due to the limited range
of electric trucks, the difficulties in estimating how
much energy is needed to carry out a trip (Pelletier,
2019), and the lack of (fast) charging opportunities
along the road. Currently employed solutions intro-
duce inefficiencies in the planning process, by for ex-
ample oversizing the vehicle battery needed for a trip,
or providing conservative energy estimations per trip.
An accurate energy consumption prediction would
enable the fleet manager to optimize the routes and
schedules. However, improving prediction accuracy
is often challenging due to uncertainties in the pre-
166
Litjens, R., Medina, R., Avramis, N., Beckers, C., Wilkins, S. and Pechenizkiy, M.
Energy Consumption Prediction with Uncertainty Quantification for Electric Truck Operations: A Data-Driven Approach.
DOI: 10.5220/0013362900003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 166-177
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

Table 1: Overview of features and uncertainties for the problem setting.
Available Input Features Measured Features Underlying Uncertainties
Gross combined weight (kg) Front axle speed (km/h) Wind speed and direction
Coordinates (lat, long) Brake pedal position (%) Road conditions
Speed limit (km/h) Acceleration pedal position (%) Driver behaviour
Ambient temperature (deg C) Energy consumption (Wh) Traffic variability
Elevation (m) Powertrain efficiency fluctuations
Cornering angle (degrees)
Traffic lights (binary)
dictions, given by variations in the route, e.g., due to
traffic flow, differences in driver behavior, or weather
conditions. Quantifying inherent uncertainties under-
lying the predictions enables uncertainty-aware deci-
sion making in the planning of the vehicles.
Approaches for energy consumption prediction
of electric vehicles can be divided into physics-
based and data-driven approaches. Physics-based ap-
proaches rely on fundamental physical laws to esti-
mate vehicle energy consumption (Yang, 2014; Wu,
2015; Fiori et al., 2016; Fotouhi, 2021). These mod-
els have difficulties in capturing variability in energy
prediction because of the above-mentioned uncertain-
ties.
Data-driven approaches leverage large datasets
and machine learning algorithms to capture the en-
ergy dynamics (De Cauwer, 2017; Basso, 2019; Nan,
2022; Pan, 2023). The latter have garnered increas-
ing attention and adoption over the past decade due
to their ability to learn relations without the need for
the direct specification of vehicle dynamics (Chen,
2021b) and the increasing amount of available data as
a whole. This work focuses on data-driven models as
they have the potential of capturing the uncertainties
in the energy estimations, while still combining in-
sights from the physics-based modeling approaches.
Data-driven state-of-the-art approaches use a
two-stage model architecture, where the speed profile
and the energy consumption are predicted using
Long Short-Term Memory (LSTM) models (Nan,
2022; Chen, 2021a; Petkevicius, 2021; Feng, 2024).
However, this technique blindly applies the data-
driven approach, where no insights are taken from
the application domain, i.e., the physics behind the
vehicle dynamics. Some works have touched upon
the topic of uncertainty quantification (Petkevicius,
2021; Thorgeirsson, 2021) by evaluating uncertainty
scores as a Gaussian random variable. However, the
uncertainty score in (Petkevicius, 2021) produces
calibration intervals that often do not contain the
true values. To the best of the authors’ knowledge,
no strategy available in the literature leverages the
extensive physics knowledge of the electric vehicle
to produce better predictions and quantify the uncer-
tainty in the energy prediction of an electric vehicle
reliably.
The contributions of this paper build upon the
two-stage predictors from the presented literature.
This work improves the second stage (energy
prediction) by:
1. providing a novel architecture that takes into ac-
count the physics of the vehicle, so that regenera-
tive and consumed energy are modeled separately
(LSTM-Decom);
2. introducing the Long Short-Term Memory -
Student-t Mean-Variance (LSTM-TMV) method
that provides uncertainty scores. The method is
based on a Student’s t-distribution which outper-
forms the state-of-the-art Gaussian method.
This paper is organized as follows. Section 2 de-
scribes the specific setting for which the models are
designed and evaluated. Section 3 describes the pre-
diction architecture and models in it. In Section 4,
the approaches relating to uncertainty scores are de-
scribed. Section 5 presents the results evaluated in a
real data set of an electric truck. Section 6 closes the
paper with conclusions and future work.
2 PROBLEM STATEMENT
This work focuses on the setting where electric trucks
transport goods from a Distribution Centre (DC) to
one or more supermarkets. Each truck must drive var-
ious routes to ensure all supermarkets remain stocked
and return to the DC or a nearby charging station af-
terward. Each part of the route between a DC and/or a
supermarket is considered a “Trip”. The challenge is
to predict the energy consumption of upcoming trips,
using the data features available before departure.
Table 1 describes the available features for the
considered setting. Many of these features are ac-
cessible before the driving phase and are either de-
termined as part of the operating plan (weight and
Energy Consumption Prediction with Uncertainty Quantification for Electric Truck Operations: A Data-Driven Approach
167

route) or retrieved through external information sys-
tems (e.g., APIs). The remaining features, which can-
not simply be retrieved before a trip, are found in the
second column of Table 1. They cannot be used as
predictors: instead, they are used for model training
purposes or to analyse the results. The third column
of Table 1 indicates influencing factors that are infea-
sible to (precisely) measure or forecast and introduce
uncertainty underlying each prediction. Trip data is
available for two trucks of the same model over the
course of two years (2020 and 2021).
The target of this research is to predict the total
amount of battery energy e
i
consumed in each trip i,
measured in watt-hours (Wh), and quantify the com-
bined magnitude of the underlying uncertainties with
an uncertainty score.
3 METHODOLOGY
The method proposed in this paper builds on the start-
of-the-art data-driven methods for energy consump-
tion prediction and hence includes a two-stage archi-
tecture with the segmentation of the trips (De Cauwer,
2017). To do so, in Section 3.1, trips are divided into
smaller segments, then, in Section 3.2, the speed is
predicted for these segments and, finally, the energy
consumption is estimated.
3.1 Trip Segmentation
The trips are segmented to capture the local driving
conditions and road variations that directly impact
energy consumption, as well as to provide a consis-
tent input size to the machine learning models. It
is assumed that there are no long-term dependencies
between data points within the trip, as driving be-
haviour or events in the past generally only influence
the current energy consumption when they occurred
recently. This gives the possibility of segmenting the
trips into smaller sub-sequences. Furthermore, this
structure allows the model to learn from segments
on a more fine-grained level, enabling generalization
across trips. Note that the prediction targets have been
transferred from trip- to segment-level, with each seg-
ment j in trip i having its energy consumption predic-
tion target e
i, j
.
Equation 1 formalizes the segmented dataset D
with N trips.
D
(i)
= ((X
i,1
,e
i,1
),...,(X
i, j
,e
i, j
),...,(X
i,N
i
,e
i,N
i
))
∀i ∈ {1, . . . , N}.
(1)
Here, X
i, j
represents the sequence of features mea-
sured in segment j of trip i, and e
i, j
is the measured
energy. The predicted energy on the segment level is
summed as ˆe
i
=
∑
N
i
j=1
ˆe
i, j
, where N
i
is the amount of
segments in trip i and ˆe
i, j
is the predicted energy for
segment j in trip i.
Two methods for segmentation are used in the
model pipeline:
1. Distance Segmenter. The first segmentation
method splits the trips into segments of equal dis-
tance S, with a single data point every ∆s me-
ters. ∆s is defined in such a way that its value
represents a forecasting granularity that can be
achieved before trips.
This method is used for the speed prediction stage,
as time-based methods are unavailable before ve-
hicle speed along the route is known.
2. Change Segmenter. The second method is based
on the elapsed time within a trip and route char-
acteristics: First, trips are split into segments
of T seconds. The choice of T is based on a
trade-off between the size of the input segments
and the amount of context needed to predict the
energy consumption accurately. After this step,
the method is extended with additional segment
“splits” to make the segmentation occur at more
natural points. The technique leverages a subset
of input data features that describe the route ahead
(traffic lights, maximum speed changes, turns);
each time such an “event” occurs, the trip is split
into a new segment.
This method is used for the energy consumption
stage, as the relation between power and energy
consumption depends on time, making the seg-
mentation method more aligned with the physical
process.
3.2 Sequential Modeling Architecture
While segmentation narrows the scope of the predic-
tion problem, modular decomposition allows the in-
troduction of more domain knowledge into the design
of the model pipeline. As acceleration and speed are
influential features in the dataset for predicting energy
consumption and they are available as measurements,
it is beneficial to create a separate model to predict
these features, instead of relating the inputs to the
energy consumption directly. The results are subse-
quently passed to the energy consumption estimation
stage. This makes the design of the energy consump-
tion estimation model independent of the design of
the speed profile predictor.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
168
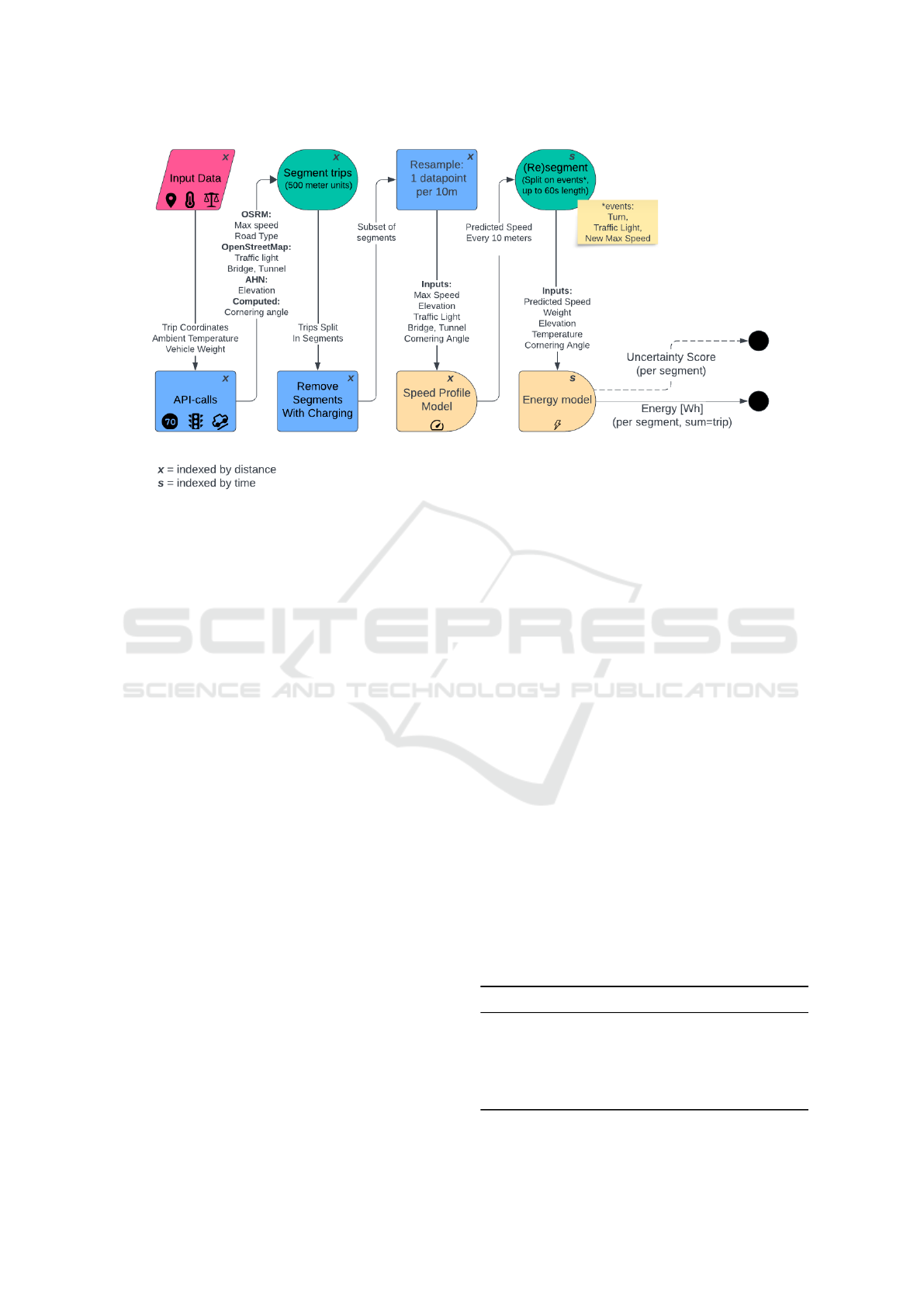
Figure 1: Full evaluation pipeline of the two-stage architecture (uncertainty scores indicated with a dashed line, to indi-
cate they are only present for the uncertainty-aware models). The pink block represents a dataset, the blue boxes indicate
(pre-)processing steps, and the green ovals indicate segmentation steps. Online API’s include Open Source Routing Mahcine
(OSRM), OpenStreetMap, and ‘Algemeen Hoogtebestand Nederland’ (AHN). Finally, the yellow figures indicate data-driven
prediction models and a black dot represents an output.
Formalizing this structure, one can see the seg-
ment predictor function f as a composite function
consisting of speed profile predictor g and energy con-
sumption estimator h:
f (X
i, j
) = h (g (X
i, j
)) for all trips i and segments j,
(2)
where function f : R
T
i, j
×d
→ R for d input features
and T
i, j
data points in the input segments.
3.3 Speed Profile Prediction
The first stage of the model aims to predict the speed
for upcoming trips. The historical measured speed
data can be used as prediction targets during the train-
ing process of the speed profile prediction model. Im-
plementing the speed predictor requires a sequence-
to-sequence model (i.e., a model that predicts a se-
quence based on one or more input sequences), such
that a single speed prediction is given for each in-
put data point. In this work, speed profiles are pre-
dicted for a generic driver, as driver identifiers were
not present in the input dataset.
Recurrent Neural Network (RNN) models are a
class of sequence-to-sequence models that can learn
short- to medium-distance dependencies between the
inputs. This aligns with the real-world dependency
structure of driving behaviour. Specifically, the
model used for this research is a LSTM model,
which is an improvement over the original recurrent
neural network that allows learning over longer input
sequences. The input features and the target feature
are given in Table 2. The initial speed of the segment
is provided during the training process and replaced
with the last prediction of the previous segment
during trip-level predictions.
The model architecture consists of a bidirectional
LSTM module, capturing both past and future speed
profile indicators. An intuitive example of why this
is needed arises when one considers upcoming traffic
events or road features, such as traffic lights. The
speed profile predictor has to account for these before
the vehicle passes the light itself. A stacked 2-layer
setup is used to allow more refined processing of
the sequence. Each LSTM output is passed through
a series of fully connected neural network decoder
layers to produce a sequence of predictions.
Table 2: Input and target features for the LSTM speed pre-
diction model. Inputs and predictions are given on a 1Hz
basis.
Input Features Target Feature
Speed limit (km/h) Speed (km/h)
Elevation (m)
Traffic lights (binary)
Cornering angle (degrees)
Initial speed in segment (km/h)
Energy Consumption Prediction with Uncertainty Quantification for Electric Truck Operations: A Data-Driven Approach
169
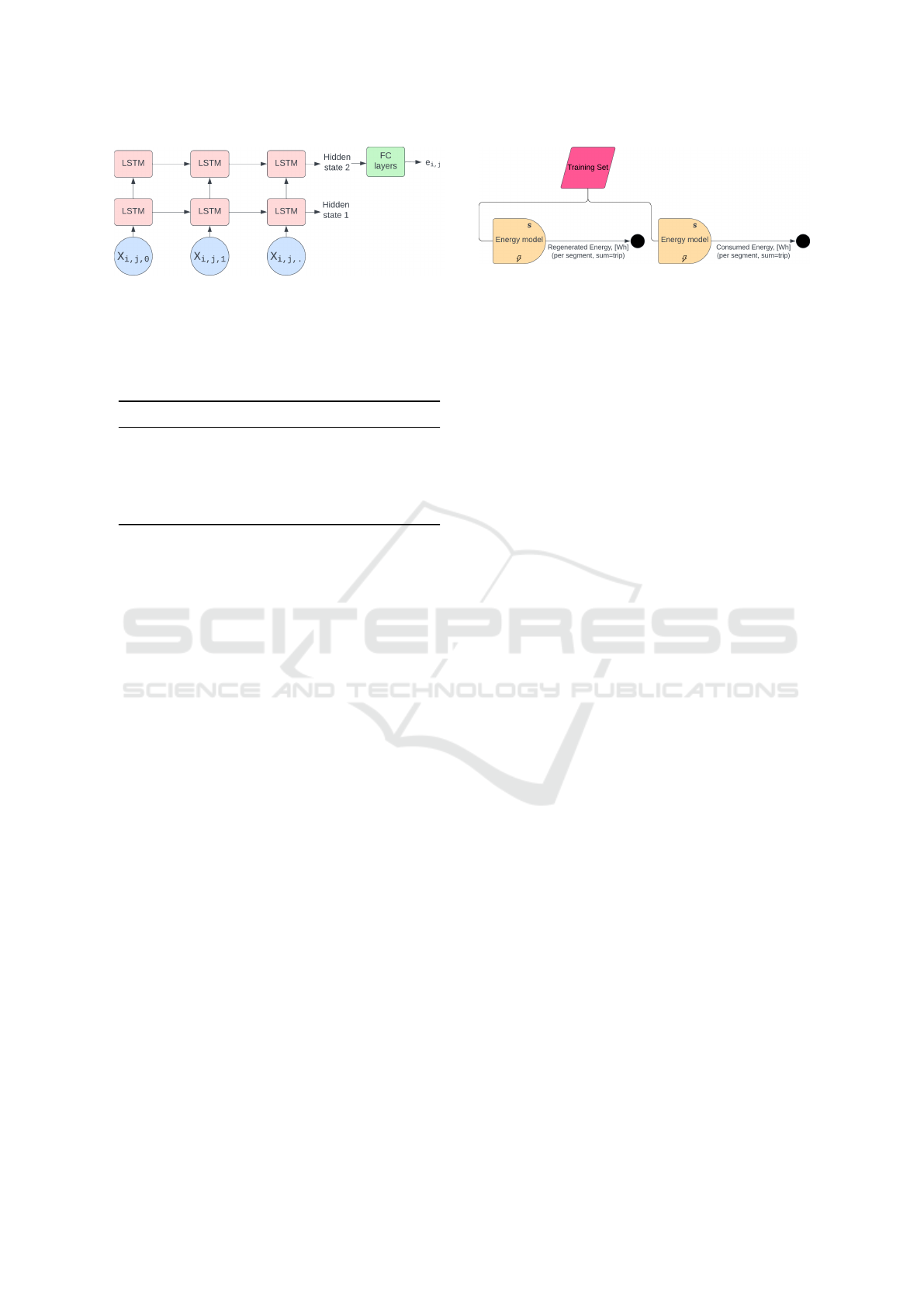
Figure 2: LSTM encoder architecture. The input sequence
is encoded before being passed to a series of fully connected
(FC) layers that estimate the energy consumption.
Table 3: Input and target features for the LSTM encoder
energy consumption model. Input is given on a 1Hz basis,
predictions on segment level.
Input Features Target Feature
Speed (km/h) Energy (Wh)
Weight (kg)
Elevation (m)
Ambient Temperature (deg C)
Cornering angle (degrees)
3.4 Energy Consumption Estimation
The subsequent step involves developing a model for
estimating energy consumption itself. The training of
this model is done independently and involves true
speed measurements. Even though the proposed ar-
chitecture, where second-by-second data within the
segments is given as an input sequence, is not found
in the literature, the use of LSTM components is
widespread in this and other application domains.
Therefore, the state-of-the-art model is the LSTM en-
coder architecture.
The model uses the entire input sequence X
i, j
to
predict the energy consumption and produces a sin-
gle scalar output per segment; the input features are
described in Table 3. The input is then processed by
two stacked LSTM layers, keeping track of two hid-
den states throughout the process (see Figure 2). At
the end of the input sequence, the hidden state of the
top layer can be seen as a high-level encoding of the
entire input sequence. This encoding is given as input
for a series of fully connected layers that produce an
energy prediction.
This setup assumes a fixed sequence length for
each segment. However, the input segments have
varying durations as the Change Segmenter uses
events to split the segments. Therefore, the segments
are padded to have equal length.
Evaluations of the performance of the LSTM
encoder model show that the prediction of the
amount of regenerative energy as a result of regen-
Figure 3: Proposed adaptation on energy consumption
pipeline. The entire preprocessing remains the same but
two models are trained to predict positive and negative con-
sumption components.
erative braking is the main source of error, as seen
in Figure 8. Regenerative braking is a technology in
electric vehicles that allows them to recover part of
the energy typically lost during braking and redirect
it back to the battery. The braking energy recovery is
defined within each segment as in Equation 3:
e
regen,i, j
=
Z
t
2
t
1
P(t) · 1
{P(t)<0}
dt, (3)
where e
regen,i, j
represents the total recovered energy
within segment j in trip i, P(t) · 1
{P(t)<0}
indicates
only negative power measurements are summed, and
t
1
and t
2
denote the start and end times of the segment.
Similarly, the consumed energy e
consume,i, j
is defined
by integrating over all positive power values.
The proposed novel architecture builds on the idea
that a different relation between the input features and
energy regeneration exists compared to their relation
to energy consumption. (Fiori et al., 2016; Chen,
2021a) implemented this idea by training separate
models for deceleration and acceleration and swap-
ping between them during inference, as in their setting
the actual acceleration state was always known. In
practice, exact acceleration states often are unknown.
Furthermore, knowing the precise acceleration state
is not required in the two-stage segmented model, as
predictions are performed on the segment level. Each
segment contains both energy regeneration and con-
sumption in varying proportions. The training process
of this model is visualized in Figure 3.
A new method called LSTM-Decom is intro-
duced, where two separate models are created that are
tasked with predicting the regenerative energy e
regen
and consumed energy e
consume
within a segment, re-
spectively. This decomposition allows more control
over the design of each model and its training process.
An important design decision for the regenerative
model is the use of balanced sampling of the training
set. When the input data largely consists of segments
with little to no regenerative energy, which is com-
mon, the training process is hindered. To implement
the balanced sampler, the training set is split into two
groups: the first containing segments with more than
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
170

a minimum threshold of regenerative energy, and the
second group containing the rest. Balanced sampling
is used to undersample from the majority group (i.e.
the group containing segments with little regenerative
energy). For example, consider that there are N
regen
segments with more than 100 W h energy regenera-
tion. Then, all N
regen
high regenerating segments and
only ⌊N
regen
/3⌋ other segments are used as a training
set for the energy regeneration model. Besides reduc-
ing the size of the training set to allow for faster train-
ing, the balanced data set enables a more thorough
understanding of energy regeneration.
4 UNCERTAINTY
QUANTIFICATION
Even after the proposed model improvement, other
sources of error remain, stemming from uncertainties
in the input data. To address these errors, a different
perspective on model error is useful. Let us define the
prediction error with the equation
e
i, j
= h
D
(X
i, j
) + ε
i, j
for all i, (4)
where h
D
is the energy consumption model trained on
a dataset D with uncertainties. Viewing ε
i, j
as a real-
ization of a random variable allows us to account for
the inherent uncertainty in the predictions. The aim is
to use this new perspective to introduce an additional
uncertainty score that describes this error distribution.
An uncertainty score in energy consumption pre-
dictions allows fleet managers to have a certain level
of confidence in these estimates, helping them an-
ticipate potential variations in energy needs for the
vehicles. Decisions that can be made using this
score range from the creation of prediction intervals,
to worst-case scenarios or the definition of decision
thresholds, where the predicted value is only trusted
when the accompanying uncertainty is low enough.
The uncertainty score is, therefore, expected to fol-
low the properties described in Definition 1.
Remark 1. Expected Properties from an Uncer-
tainty Score Energy Prediction
Two properties are expected from an uncertainty
score:
1. A low uncertainty score should correlate with low
prediction errors. A fleet manager should be able
to place trust in predictions made with high cer-
tainty.
2. The uncertainty score should be low when possi-
ble. When the model indicates high levels of un-
certainty for all predictions, it is impossible to act
on it.
Another application of the uncertainty scores entails
a probabilistic approach. Consider, for example, a
planning application based on probabilities of a truck
being able to complete a segment or trip with a cer-
tain amount of energy E. This involves calculating
P(e
i, j
< E). To do so, a point-prediction is made us-
ing input X
i, j
, after which a deficiency or surplus is
found with respect to E, denoted by E = h(X
i, j
) +
∆
E,i,j
. For the uncertainty-aware models, the theo-
retical cumulative distribution function (CDF) can be
used to derive this desired probability (see Section 4.2
for a concrete example).
4.1 Gaussian Distribution Method
The state-of-the-art methods assume a zero-mean
Gaussian distribution for the model error, where the
variance is different for each ε
i, j
, i.e.,
ε
i, j
∼ N (0,Var
h
(X
i, j
)) (5)
with Var
h
(X
i, j
) as the predicted error variance for in-
put segment j in trip i. The upgrades needed to the
LSTM encoder architecture are shown in Figure 4. As
both the distribution mean and variance are predicted,
the model is called the Gaussian Mean-variance Pre-
dictor (GMP).
4.2 Proposed Student’s t-distribution
Method
This work introduces a novel approach leveraging
Student’s t-distribution with ν degrees of freedom
(t
ν
),
ε
i, j
∼ t
ν
(0,Var
h
(X
i, j
)). (6)
The t-distribution is a probability distribution used
in statistics to estimate population parameters when
the sample size is small or the population standard
deviation is unknown. It features heavier tails com-
pared to the normal distribution, reflecting the in-
creased variability typically present in smaller sam-
ple sizes. To facilitate the learning process within the
LSTM framework, let us derive from the likelihood
function L
ν
of the Student’s t-distribution with mean
0 and ν degrees of freedom, the Student’s t Negative
Log-Likelihood (TNLL) as
Loss(ε
i, j
,Var
h
(X
i, j
)) = − log L
ν
(Var
h
(X
i, j
) | ε
i, j
)
=
1
2
log(Var
h
(X
i, j
))
+
ν + 1
2
log
1 +
ε
2
i, j
νVar
h
(X
i, j
)
!
+ constant, (7)
Energy Consumption Prediction with Uncertainty Quantification for Electric Truck Operations: A Data-Driven Approach
171

Figure 4: LSTM encoder architecture with uncertainty
quantification. The top branch predicts energy consump-
tion, while the bottom branch produces an uncertainty
score.
where L indicates the loss function. As the loss func-
tion is purely used for comparison, the constant is
irrelevant and removed in the implementation of the
loss function. The cumulative distribution function
for the Student’s t-distribution, used for the proba-
bilistic use case, is:
P(e
i, j
< E) = P(ε
i, j
< ∆
E,i,j
)
= I
z
ν
2
,
1
2
, with z =
ν
ν +
∆
2
E,i, j
Var(X
i, j
)
.
(8)
where e
i, j
is the true energy consumption and E
an arbitrary reference value for energy consumption.
I
z
(a,b) is the regularized incomplete beta function.
The neural network design is equal to that of the
Gaussian mean-variance setup, as seen in Figure 4.
The core difference is the custom PyTorch loss func-
tion incorporating the TNLL loss function. The re-
sulting t mean-variance predictor is named LSTM-
TMV.
4.3 Performance Metrics
The desired properties for the uncertainty score, as
listed earlier in Definition 1, are translated to two con-
crete metrics:
1. Calibration: This metric captures how often a
predicted value is inside the bounds of a pre-
diction interval. For uncertainty-aware models,
(1−α) prediction intervals are constructed, where
α represents the significance level. This statisti-
cal quantity reflects the fault tolerance by allow-
ing up to α probability of the true value falling
outside the prediction interval. The intervals can
either be one-sided (to aid in creating a worst-case
scenario upper bound or lower bound) or two-
sided, in which case both a lower bound and upper
bound are present. The percentage of predicted
trips whose true value falls within this predicted
interval indicates the calibration. Theoretically,
this rate should equal 1 − α. Let us therefore de-
fine scores where the rate is 1 − α or higher as
well-calibrated. This metric captures that a “low
uncertainty corresponds to low error”, at least for
(1−α)% of the predictions. When the uncertainty
is lower, the interval is smaller, leaving less room
for error. For example: if the prediction intervals
for 95 out of 100 test trips contain the true value
and α was chosen to be ≥ 0.05, the model is well-
calibrated.
2. Sharpness: This metric captures how far the pre-
dicted value is from the actual value. In principle,
assigning a high uncertainty score to each predic-
tion leads to a high calibration value. This behav-
ior is unwanted. Therefore, we score the adap-
tivity/tightness of the uncertainty score by gener-
ating prediction intervals. The distance between
the true energy consumption value for a trip and
the bounds on the prediction interval defines the
value for this metric. To give an example: if a trip
has an energy consumption of 50 kWh and the up-
per bound is predicted as 55 kWh, the sharpness
is 10%.
Note that the uncertainty scores are predicted on seg-
ment level, whereas the predictions should be avail-
able on trip level. Simply adding the predicted vari-
ances produces faulty trip-level scores due to the pres-
ence of covariances between individual segments in a
trip. To face this issue, a correlation coefficient ρ is
introduced. The error covariances between segment j
and k in trip i are determined using:
Cov
j,k
= ρ
q
Var
h
(X
i, j
)Var
h
(X
i,k
) (9)
5 RESULTS AND ANALYSES
This section presents how the models described in
Section 3.4 and 4 are trained on a vehicle dataset. To
do so, Section 5.1 presents a motivational case study,
Section 5.2 shows the results for the novel energy con-
sumption model design, and Section 5.3 for the un-
certainty score results. The speed profile predictor re-
sults are important to understand the results of the full
prediction pipeline. Hence, Section 5.4 shows these
results before Section 5.5 describes the full prediction
pipeline results.
5.1 Use Case Description and Model
Training
A dataset is available containing data collected over
two years on two trucks: Truck #1 and Truck #2. Two
test sets are used to evaluate the performance. The
first set consists of data collected in year 2 for Truck
#1 (1123 trips), to show that the methods can learn
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
172
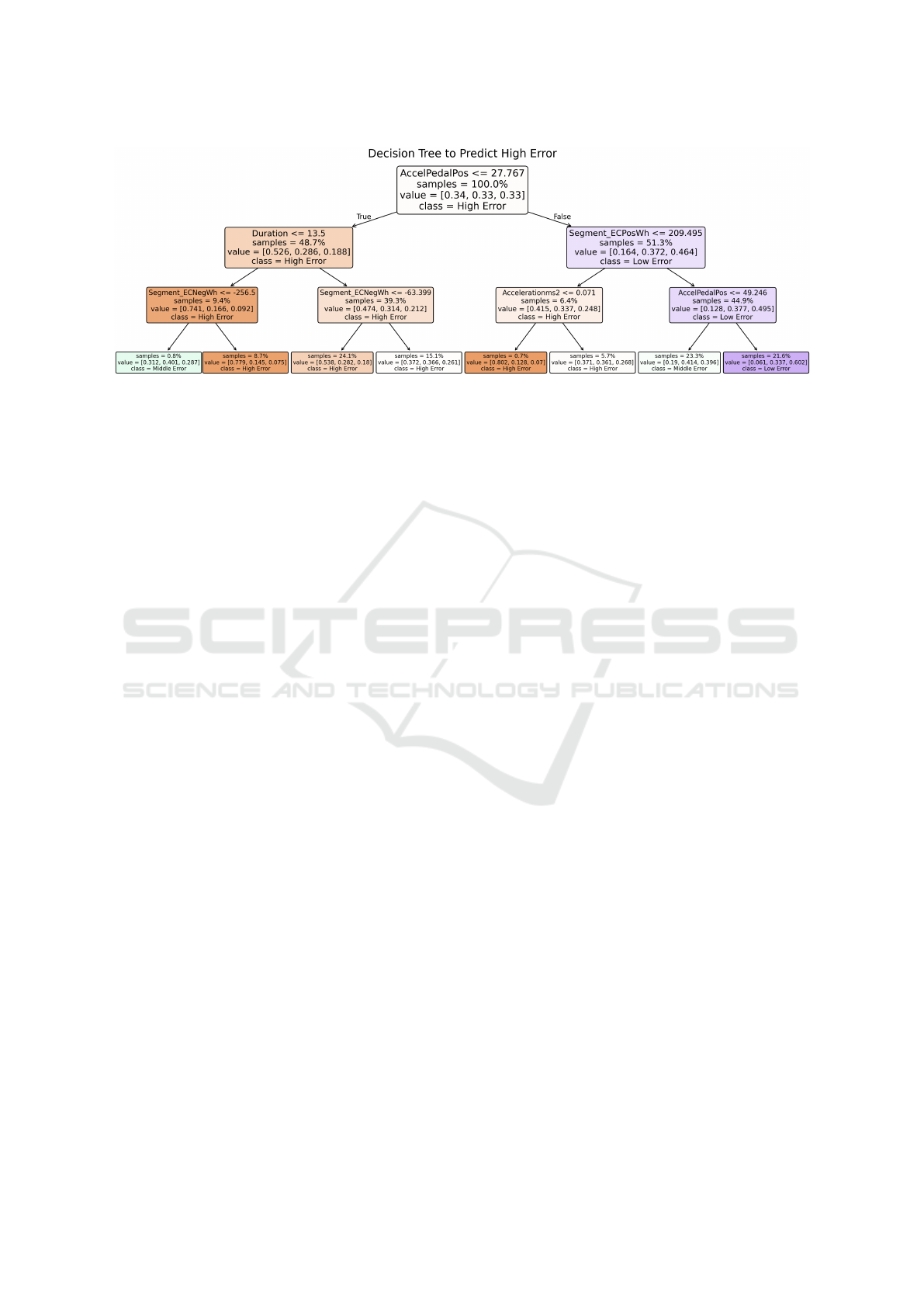
Figure 5: Decision tree to find subgroups of trips with high relative (percentage) error for the LSTM model.
from the past to predict the future. The trips for this
truck are, on average, 51 kilometers long, with out-
liers up until 125 kilometers. The second set consists
of data from year 1, for Truck #2 (2748 trips), to show
model performance for data measured on a different
truck. Note that this truck is of the same type and
produced at the same time. The trips for Truck #2
are only 16 kilometers long on average, significantly
shorter than for the first truck. For both trucks, trips
are recorded in a temperature range of -4 °C to 32 °C.
Elevation difference is only minimally present for all
trips.
For the segmentation methods, the chosen param-
eters are S = 500 m and ∆s = 10 m for the Dis-
tance Segmenter, based on the granularity of mea-
sured speeds in the dataset. The Change Segmenter
used in the energy consumption stage has a maximum
duration of T = 60 sec, producing segments that can
generalize to other trips while ensuring sufficient con-
text for predictions.
To guide the training process for both stages, the
training data set is split into an input set and a valida-
tion set. This is done by putting every 8
th
week of data
in the validation set and leaving the rest in the input
set. The model that performs best on the validation
set (in terms of segment-level mean squared error) is
saved and after all 100 epochs, this model is returned
as the training result.
The speed LSTM model was trained using a learn-
ing rate of 0.0001, a batch size of 64, and a hidden
dimension of size 512. For the energy consumption
model, the learning rate was 0.0001, the batch size
was 64, and the hidden dimension 1024. The thresh-
old for the balanced sampler, used to train the de-
composed model was found to be 100 Wh. For the
uncertainty models, correlation coefficient ρ was de-
termined to be 0.15, such that the Gaussian two-sided
prediction intervals with α = 0.05 are well-calibrated.
The same parameter is used for other intervals and the
LSTM-TMV model. The best fitting degrees of free-
dom parameter ν for the t-distribution is 4.
5.2 Energy Consumption Estimator
The results of the standard LSTM encoder model
are compared against the decomposed LSTM-Decom
model in Table 4 on two test sets. Both models are
trained using measured speed data. In terms of all in-
cluded metrics, the decomposed model outperforms
the standard model. A 19% reduction of mean abso-
lute prediction error is observed on the first test set
and a 22% reduction on the second. To confirm the
motivation behind the decomposed architecture, let us
observe the sources of error for the LSTM model by
fitting an interpretable decision tree model with depth
three and 3 classes: high relative error (assigned to the
33.3% of segments with the highest percentage error),
low relative error (assigned to the 33.3% of segments
with the lowest percentage error), and medium rela-
tive error (assigned to the rest of the segments). The
classification accuracy is only 51%, but the method
serves as a tool to find high or low-error subgroups in
the input dataset. Here, error as a result of noise is as-
sumed to be distributed equally across feature values.
The aim is to find subgroups in the input dataset for
which the error is systematically higher or lower.
Figure 5 visualizes the resulting tree. The av-
erage acceleration pedal position strongly influences
whether the error will be high or low, with a low aver-
age acceleration pedal position within a segment cor-
relating with higher errors. More concretely, 45% of
the segments have a low average acceleration pedal
position, and of those segments, 54% have high rela-
tive error. For segments with high acceleration pedal
positions, the amount of high error segments is only
16%. The reason is most likely that from a certain
acceleration pedal position and below, regenerative
braking occurs. Figure 6 confirms this by showing
Energy Consumption Prediction with Uncertainty Quantification for Electric Truck Operations: A Data-Driven Approach
173
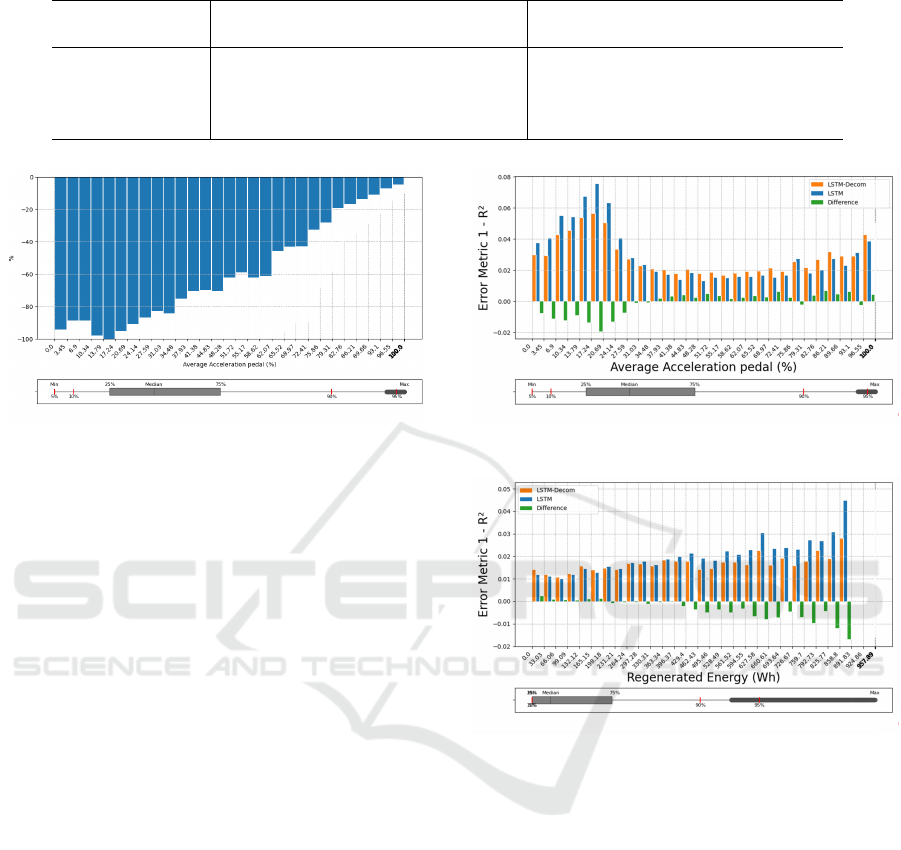
Table 4: Performance metrics comparison for LSTM and LSTM-Decom models across two truck datasets.
Metric LSTM (default) LSTM-Decom (proposed model)
Truck #1 year 2 Truck #2 year 1 Truck #1 year 2 Truck #2 year 1
MAE (Wh) 1229 1397 978 1083
RMSE (Wh) 2122 2340 1722 1880
MAPE (%) 7.4% 8.5% 6.0% 6.6%
Error <10% (%) 74% 66% 82% 79%
Figure 6: Mean regenerative energy across different val-
ues of the average acceleration pedal within segments. The
y-axis is normalized between the minimum and maximum
values for confidentiality reasons. The boxplot beneath the
x-axis indicates the distribution of values within the dataset.
a strong correlation between segments with a low ac-
celeration pedal position and higher amounts of re-
generative energy.
The LSTM-Decom model improves the perfor-
mance specifically for those segments with a low av-
erage acceleration pedal position, as shown in Fig-
ure 7a. The chosen error metric is one minus the R
2
scores across segments with different average pedal
position values. The R
2
is a measure of how much of
the variance in the energy consumptions is explained
by the inputs. As most values are relatively close to 1
the difference to one is used, implying that low values
of this metric indicate good performance.
The improvement in predicting regenerative en-
ergy is confirmed by Figure 7b, where increasingly
higher regenerative energy correlates with higher im-
provements in prediction accuracy for the LSTM-
Decom model. Even with these improvements, the
biggest source of error (derived using the decision
tree method) remains the low average acceleration
pedal position. This might be related to the fact
that the amount of energy that is regenerative is
highly uncertain. Overall, these results show that the
LSTM-Decom model improves prediction accuracy
by leveraging domain knowledge to face the main er-
ror source, leading to a 20% reduction of mean abso-
lute percentage error over both test sets.
(a) 1-R
2
metric across different values of the average accel-
eration pedal within segments.
(b) 1-R
2
metric across different values of the average regen-
erative braking within segments.
Figure 7: Energy consumption estimation comparison.
5.3 Uncertainty Scores
The results of the uncertainty-aware models are first
evaluated for the prediction interval application by
creating such intervals for confidence terms α = 0.05
and α = 0.01, indicating low and very low tolerance
for errors, respectively. The results in Table 5 provide
the results for both one-sided upper bounds and two-
sided intervals. The former can be used for the de-
sign of worst-case scenarios, whereas the latter gives
a more complete image of the quality of the uncer-
tainty score.
Results show that for 6 out of 8 evaluated
intervals, the LSTM-TMV model produces well-
calibrated scores (see Section 4 for context on the
metrics). For the Gaussian model, this only holds for
3 out of 8 intervals, with several calibration values
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
174
far from the target (e.g. 75% for the two-sided in-
terval with α = 0.05). When looking at the average
calibration error (distance from 1 − α), the error for
the GMP model is 7.7%, whereas the average calibra-
tion error is only 0.6% for the LSTM-TMV model.
This corresponds to a 92% decrease in calibration er-
ror. As the calibration metric defines the reliability of
the intervals, the LSTM-TMV model is deemed best
for modeling the uncertainties. However, this comes
at the cost of a higher median sharpness as listed in
Table 5. This means that the intervals for LSTM-
TMV are generally wider than for the GMP model.
When leveraging the score in planning applications,
this results in more “conservative” bounds than the
Gaussian scores.
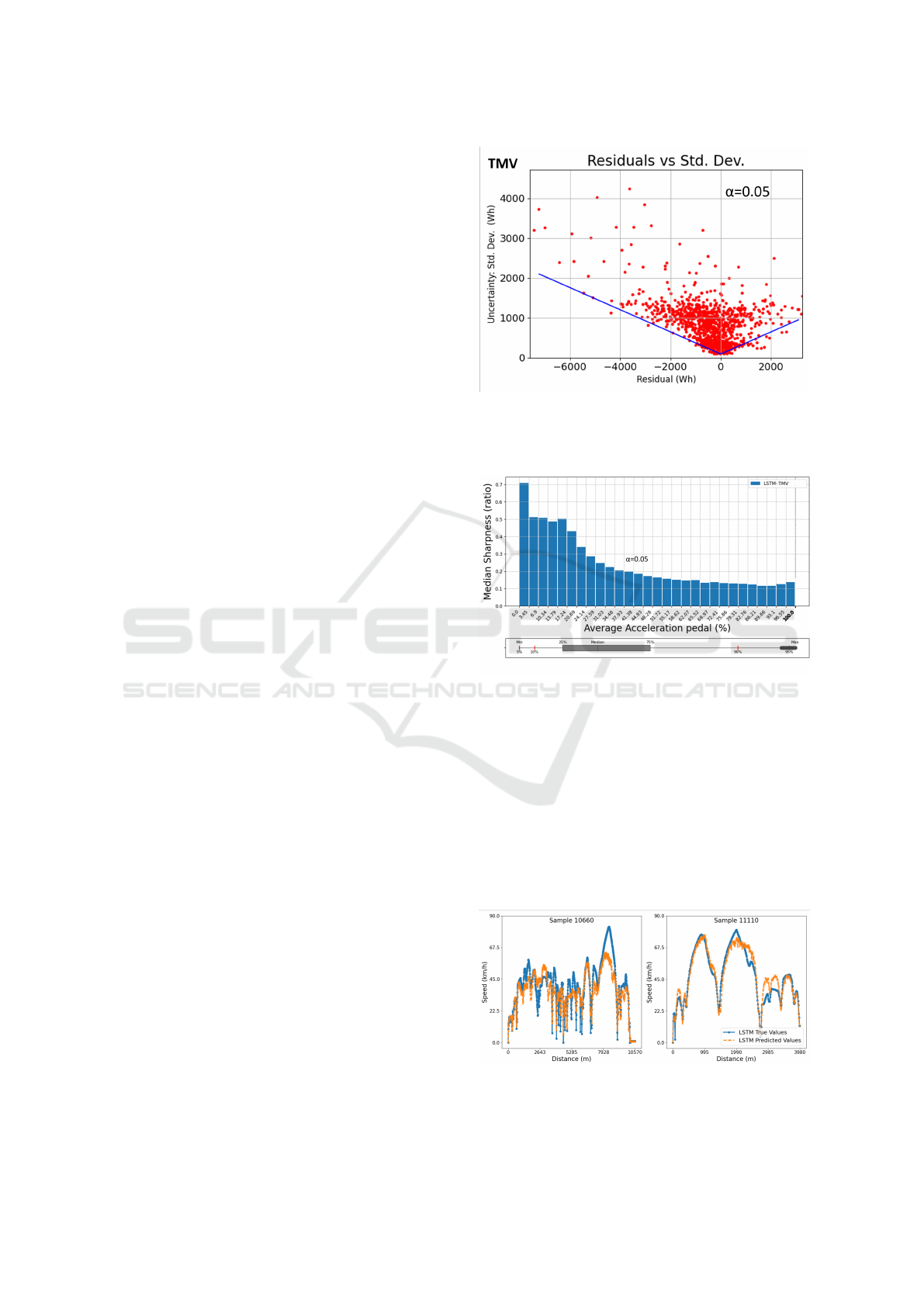
Let us look at another use-case for the uncertainty
score: a decision threshold, below which predictions
are deemed reliable or above which they are marked
as too risky. Figure 8 visualizes the relation be-
tween model error and predicted uncertainty scores.
It shows how a lower bound can be drawn, indicat-
ing that lower uncertainty scores correspond to lower
model errors. Thus, the figure can aid the end-user in
choosing a suitable threshold. Figure 9 shows that the
median sharpness of generated prediction intervals
using the LSTM-TMV model is higher for lower av-
erage acceleration pedal positions in segments. This
is consistent with what is expected, considering that
many uncertainties are paired with the amount of re-
generative in these cases.
To give an example of the probabilistic use-case
of the uncertainty score, let us evaluate an example
trip selected from the first test set. With a predicted
consumption of 20,407 Wh and a predicted standard
deviation of 1069 Wh, a fleet manager might wonder
what the probability is that 22,000 Wh of energy is
enough to complete the trip. Using the CDF function
provided in Section 4.2, a probability of 89.5% is de-
rived.
5.4 Speed Profile Predictor
The results of the LSTM model for speed predictions
are given in Table 6. For the speed prediction and
the full prediction pipeline experiments (Section 5.5)
only the test set for Truck #1 in year 2 is used for
evaluation.
Figure 10 shows the resulting predicted speed pro-
files for two sampled trips. Generally, the predicted
speed sequences follow the measured speeds, show-
ing the ability to predict acceleration and deceleration
patterns. However, the sample on the left is an exam-
ple of a phenomenon observed throughout the dataset;
the model seems unable to capture high-frequency
Figure 8: Lower bound on the uncertainty score (st.dev) for
all residuals of the LSTM-TMV model on test set “Truck #1
- year 2”. α = 0.05 relates to the design of the lower bound,
such that 95% of the points lie above it.
Figure 9: Visualization of the median sharpness (two-sided
interval with α = 0.05) across different values for the aver-
age acceleration pedal position. The uncertainty scores are
higher for lower acceleration pedal positions.
changes (seen in the middle of the segment) and rather
predicted a smoothed velocity profile. The predicted
speeds around 3000 meters of the sample on the right
show that certain driving behavior was expected (two
peaks) but not measured in the dataset. This shows
how the model can learn patterns, which might de-
pend on uncertainties in driving behavior or the envi-
ronment.
Figure 10: Predicted speed sequences plotted against mea-
sured speed data for two sampled trips in the year 2 for
Truck #1.
Energy Consumption Prediction with Uncertainty Quantification for Electric Truck Operations: A Data-Driven Approach
175
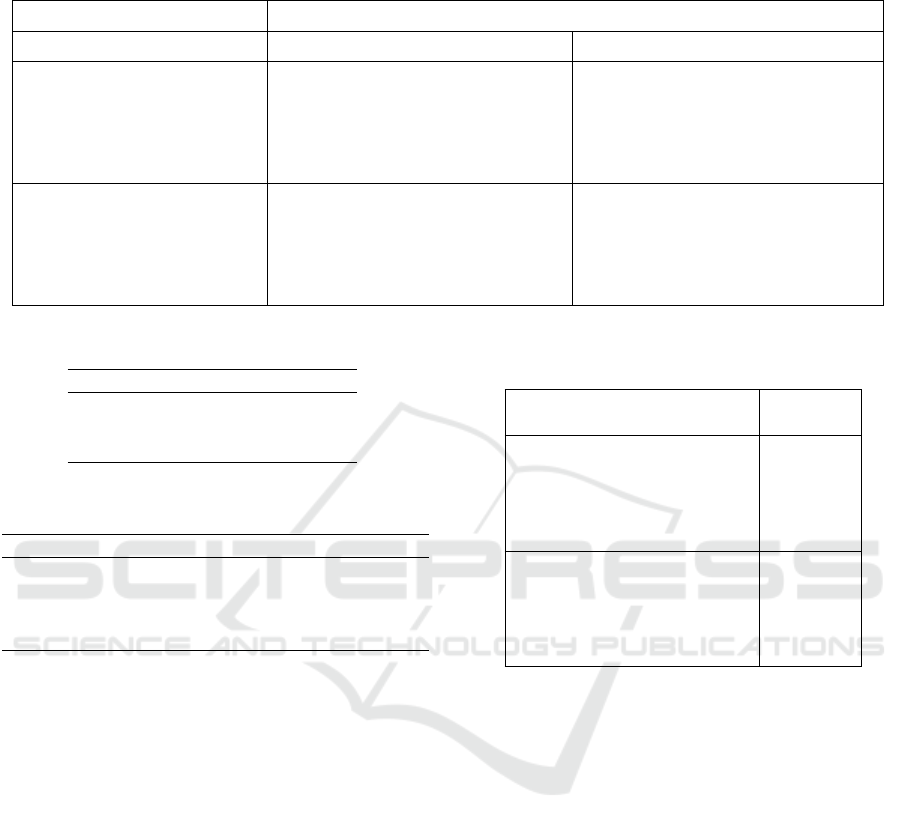
Table 5: Quantitative analysis comparing the uncertainty-aware LSTM-GMP and LSTM-TMV models. Calibrations meeting
alpha thresholds are in bold.
Model Comparison LSTM-GMP LSTM-TMV
Dataset Truck #1 Year 2 Truck #2 Year 1 Truck #1 Year 2 Truck #2 Year 1
α = 0.05:
Calibration upper bound 96.44% 97.82% 95.90% 93.67%
Calibration two-sided 75.07% 76.20% 95.37% 95.92%
Median Sharpness 10.22% 10.92% 11.14% 11.86%
Median Sharpness two-sided 24.27% 25.93% 29.01% 30.90%
α = 0.01:
Calibration upper bound 98.13% 99.20% 98.84% 99.53%
Calibration two-sided 91.54% 89.56% 99.11% 99.75%
Median Sharpness 14.40% 15.39% 19.58% 20.85%
Median Sharpness two-sided 31.82% 34.00% 48.11% 51.23%
Table 6: Speed profile results.
Metric Truck #1 Year 2
MAE (km/h) 3.64
RMSE (km/h) 5.59
MdAPE (%) 7%
Table 7: Results on the full prediction pipeline for the
LSTM-Decom and LSTM-TMV models (Trip-level).
Metric LSTM-Decom LSTM-TMV
MAE (Wh) 1507 2253
RMSE (Wh) 2484 3658
MAPE (%) 10.8% 12.50%
Error <10% (%) 59% 40%
5.5 Full Prediction Pipeline
Evaluating the speed profile predictor in combination
with both the LSTM-Decom model as well as the
LSTM-TMV model leads to the results in Table 7.
The LSTM-Decom model shows a mean absolute pre-
diction error of 10.8% and predicts 59% of segments
with an error of 10% or below, showing suitable per-
formance for a majority of segments. Compared to
the evaluations for the energy consumption models in
Section 5.2, higher errors are observed for the full
prediction pipeline. Given the presence of predic-
tion errors for the speed model, this decline in per-
formance is expected. The calibration of the LSTM-
TMV model in the full prediction pipeline as seen in
Table 8 is slightly below the target rate for the pre-
dicted intervals and alpha values. This is most likely
because the uncertainty in the predicted speed is not
accounted for. Still, the calibrations are generally
high, indicating that the scores convey meaningful in-
formation about the underlying uncertainties.
Table 8: Calibration and sharpness results for Truck #1 year
2 at different alpha values.
Metric
Truck #1
Year 2
α = 0.05:
Calibration upper bound 90.45%
Calibration two-sided 77.61%
Median Sharpness 11.63%
Median Sharpness two-sided 30.29%
α = 0.01:
Calibration upper bound 95.72%
Calibration two-sided 94.56%
Median Sharpness 20.44%
Median Sharpness two-sided 50.23%
6 CONCLUSIONS AND FUTURE
WORK
Motivated by the increasing adoption of battery-
electric trucks and their operational challenges related
to energy consumption prediction, this work investi-
gated a two-stage data-driven approach to predict the
energy consumption of electric trucks. The approach
integrated a speed profile predictor and an energy con-
sumption estimator.
The key findings of this paper improve the energy
consumption estimator or provide a measure of the
uncertainty in the predictions. In the first key find-
ing, the energy consumption estimation is improved
by including the novel Long Short-Term Memory
(LSTM)-Decom architecture, which decomposes the
energy consumption into regenerative and consumed
energy. The second key finding produces an uncer-
tainty measure in the energy prediction. Compared
to the state-of-the-art Gaussian uncertainty scores,
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
176

the implemented LSTM-TMV approach assumes a t-
distributed error, which successfully produced well-
calibrated prediction intervals.
The approach is evaluated using a real data set
recorded in electric trucks. Results show a mean ab-
solute prediction error of 7.4%, when evaluating only
the energy estimation part (i.e., using true speeds).
The reduction of error compared to a standard LSTM
encoder architecture is 20%, where analysis shows
this is due to improvements in independently predict-
ing regenerative energy. Evaluating the uncertainty
quantification scores, the novel t-distributed error ap-
proach reduces the calibration error (when compared
to a Gaussian approach) by as much as 92%.
The resulting approach shows a mean absolute
prediction error of 10.8%, when both the speed and
energy consumption are estimated (i.e., the combined
pipeline). The decrease in the prediction error com-
pared to state-of-the-art techniques and the provided
uncertainty in prediction error make the approach
suitable for planning operations.
Future work approaches focus on improving the
pipelined by including probabilitic approaches to pre-
dict speed, exploring unceratainty propagation from
speed to energy prediction, and enhance the data-
driven predictions by levearaging from the insights
provided by the well-know vehicle physic behaviour.
ACKNOWLEDGEMENTS
This work has received financial support from the
Dutch Ministry of Economic Affairs and Climate, un-
der the grant ‘R&D Mobility Sectors’, projects Green
Transport Delta - Electrificatie (GTD-e) and Charging
Energy Hubs (CEH), and the European Union’s Hori-
zon 2020 research and innovation programme under
grant agreement No 101192657, under the title of
FlexMCS.
REFERENCES
Basso, R. (2019). Energy consumption estimation in-
tegrated into the Electric Vehicle Routing Problem.
Transportation Research Part D: Transport and En-
vironment, 69:141–167.
Chen, Y. (2021a). Data-driven estimation of energy con-
sumption for electric bus under real-world driving
conditions. Sustainable Transport, Energy, Environ-
ment, & Policy, 98:102969.
Chen, Y. (2021b). A Review and Outlook of Energy Con-
sumption Estimation Models for Electric Vehicles.
SAE International Journal of Sustainable Transporta-
tion, Energy, Environment, & Policy.
De Cauwer, C. (2017). A Data-Driven Method for Energy
Consumption Prediction and Energy-Efficient Rout-
ing of Electric Vehicles in Real-World Conditions. En-
ergies, 10(5):608.
DriveToZero (2024). Memorandum of understanding (mou)
on zero-emission medium- and heavy-duty vehicles.
online.
Dutch Government (2019). National climate agreement.
Policy report on adaptation and mitigation strategies
to combat climate change.
Feng, Z. (2024). Energy consumption prediction strat-
egy for electric vehicle based on LSTM-transformer
framework. Energy, page 131780.
Fiori, C., Ahn, K., and Rakha, H. A. (2016). Power-
based electric vehicle energy consumption model:
Model development and validation. Applied Energy,
168:257–268.
Fotouhi, A. (2021). Electric vehicle energy consumption es-
timation for a fleet management system. International
Journal of Sustainable Transportation, 15(1):40–54.
International Energy Agency (IEA) (2024). Global
EV outlook 2024. https://www.iea.org/reports/
global-ev-outlook-2024. Licence: CC BY 4.0.
Ministry of Infrastructure and Water Management (2024).
Zero-emissiezones in nederland. Web page. Informa-
tion about the implementation dates and locations of
zero-emission zones in 29 Dutch municipalities. Ac-
cessed: 01-07-2024.
Nan, S. (2022). From driving behavior to energy consump-
tion: A novel method to predict the energy consump-
tion of electric bus. Energy, 261:125188.
Pan, Y. (2023). Development of an energy consumption
prediction model for battery electric vehicles in real-
world driving: A combined approach of short-trip seg-
ment division and deep learning. Journal of Cleaner
Production, 400:136742.
Pelletier, S. (2019). The electric vehicle routing problem
with energy consumption uncertainty. Transp. Re-
search Part B, 126:225–255.
Petkevicius, L. (2021). Probabilistic Deep Learning for
Electric-Vehicle Energy-Use Prediction. In 17th
International Symposium on Spatial and Temporal
Databases, pages 85–95, virtual USA. ACM.
Thorgeirsson, A. (2021). Probabilistic Prediction of Energy
Demand and Driving Range for Electric Vehicles With
Federated Learning. IEEE Open Journal of Vehicular
Technology, 2:151–161.
Wu, X. (2015). Electric vehicles’ energy consumption mea-
surement and estimation. Transportation Research
Part D: Transport and Environment, 34:52–67.
Yang, S. (2014). Electric vehicle’s electricity consumption
on a road with different slope. Statistical Mechanics
and its Applications, 402:41–48.
Energy Consumption Prediction with Uncertainty Quantification for Electric Truck Operations: A Data-Driven Approach
177
