
MCPro: A Procedural Method for Topologically Correct Isosurface
Extraction Based on Marching Cubes
Julian Stahl
a
and Roberto Grosso
b
Visual Computing Erlangen, Friedrich-Alexander-Universit
¨
at Erlangen-N
¨
urnberg, Germany
Keywords:
Isosurface Extraction, Marching Cubes, Topological Correctness, Saddle Points, Trilinear Interpolation.
Abstract:
In this work, we present an innovative procedural algorithm designed for extracting isosurfaces from scalar
data within hexahedral grids. The geometry and the topological features of the intersection of a level set of the
trilinear interpolant with the faces and the interior of a reference unit cell are analyzed. Ambiguities are solved
without the help of lookup tables, generating a topologically correct triangulation of the level set within the cell
that is consistent across cell boundaries. The algorithm is based on constructing and triangulating a polygonal
halfedge data structure that includes contours and critical points of the trilinear interpolant. Our algorithm
is capable of handling many singular cases that were not solved by previous methods. The efficacy and
correctness of the algorithm were tested on a variety of academic and praxis-relevant CT and MRI datasets.
1 INTRODUCTION
Isosurfacing is a technique for visualizing scalar vol-
ume data by extracting a surface with a constant iso-
value. The surface is often represented as a trian-
gle mesh that can be used for further processing and
computations. Marching Cubes (MC) (Lorensen and
Cline, 1987) is the most common isosurfacing algo-
rithm because of its simplicity and performance. It
computes a triangulation of the surface within dis-
cretized cells of the volume based on trilinear inter-
polation between data points. Especially for compu-
tations and mesh processing algorithms, the topology
of the extracted mesh is essential. An isosurfacing
algorithm that guarantees that the generated meshes
are watertight is called topologically consistent. How-
ever, a topologically consistent triangulation does not
necessarily have the same topology as the trilinear
isosurface. If the extracted mesh is homeomorphic
to the trilinear interpolant, it is called topologically
correct. The original version of Marching Cubes is
neither topologically consistent nor correct.
Many improvements have been proposed to make
Marching Cubes topologically correct, but some spe-
cial cases have been often overlooked. March-
ing Cubes uses predefined triangulations stored in a
lookup table and chooses based on 256 cases deter-
mined only by the scalar field value on the cell ver-
a
https://orcid.org/0009-0005-7564-9984
b
https://orcid.org/0000-0001-5965-5325
tices. However, when considering the trilinear inter-
polant, there is more than one possible triangulation
in some cases. These cases are called ambiguous,
and many different disambiguation techniques have
been proposed. For example, the asymptotic decider
(Nielson and Hamann, 1991) will choose the correct
branches of the isosurface. The intersection of an
isosurface of the trilinear interpolant with an axis-
aligned plane is a rectangular hyperbola. The rectan-
gular hyperbola can degenerate into a singular cross,
two axis-aligned lines intersecting at a singular vertex
for a particular combination of the scalar field values
as shown in Figure 1.
Figure 1: A singular face with a singular point at the inter-
section of the two axis-aligned lines in blue. Positive and
negative corners are marked in green and red.
As we discuss in Section 4, this happens more
frequently in medical data where the resolution of
Stahl, J. and Grosso, R.
MCPro: A Procedural Method for Topologically Correct Isosurface Extraction Based on Marching Cubes.
DOI: 10.5220/0013309800003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th Inter national Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 331-338
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
331
values is often limited to integers. In such cases,
the disambiguation approaches fail to determine
the correct topology of the isosurface. Therefore,
we propose a new isosurfacing algorithm based on
Marching Cubes that generates topologically correct
triangulations and can handle singular cases that
other methods cannot solve. The triangulations are
computed procedurally without using a lookup table,
which avoids hand-crafting and storing a large num-
ber of possible configurations. The algorithm utilizes
simple properties of the isosurface and the trilinear
interpolation for robust topology disambiguation.
The contributions of this paper are:
• a lookup table-free, procedural algorithm for
topologically correct isosurface extraction
• handling of singular cases
• an open-source implementation (Stahl, 2025)
In Section 2, we discuss related work that focuses
on improving the topological properties of March-
ing Cubes and other isosurfacing methods. In Sec-
tion 3 the topology of the trilinear interpolant is ana-
lyzed and our algorithm is described. We show some
results for singular cases and a medical dataset in
Section 4 and compare the triangulations generated
by our method with the trilinear interpolant. Addi-
tionally, we verify our algorithm with a test dataset
and discuss non-manifoldness occurring in the trilin-
ear interpolant. Finally, in Section 5, we shortly re-
view and comment on the results of our work.
2 RELATED WORK
The Marching Cubes algorithm was proposed by
(Lorensen and Cline, 1987) and has since been im-
proved in many aspects. In this section, we consider
advances regarding topological correctness, some of
which were summarized by (Newman and Yi, 2006).
There are two kinds of topological ambiguities.
Face ambiguity occurs if the two pairs of opposite cor-
ners of a face are on different sides of the isosurface.
It can lead to holes between adjacent cells if the deci-
sion on which corners to connect is inconsistent. One
approach to resolve the inconsistency is to exploit
only rotational symmetry in the Marching Cubes ta-
ble (Nielson, 2003), (Nielson et al., 2002). However,
a topologically consistent triangulation does not have
to be topologically correct; that is homeomorphic to
the isosurface of the trilinear interpolant. (Nielson
and Hamann, 1991) proposed the asymptotic decider
to solve face ambiguity in a topologically correct way.
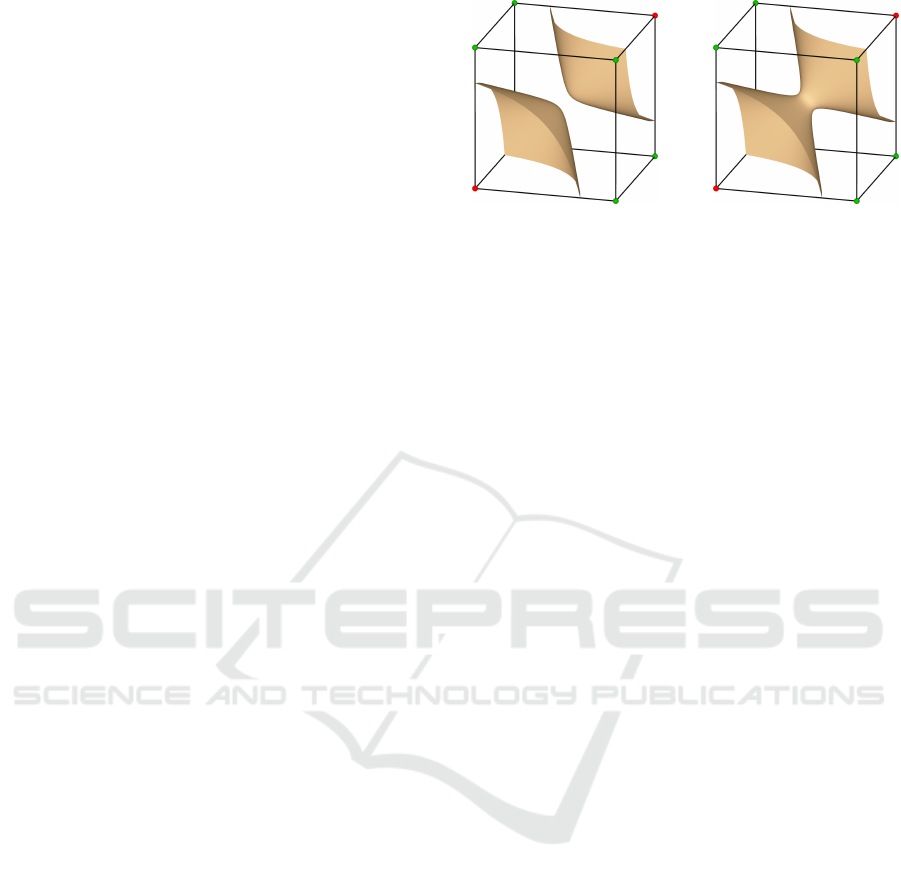
Figure 2: An interior ambiguity: the two diagonally op-
posed corners may be separated or connected by a tunnel.
(Natarajan, 1994) was the first to describe the
problem of interior ambiguity. Here, opposite corners
of a cell can be connected by a tunnel, as shown in
Figure 2. Natarajan added four subcases to the orig-
inal 15 cases of Marching Cubes. (Chernyaev, 1996)
further extended the Marching Cubes table to include
33 different triangulations. (Etiene et al., 2012) noted
that there are cases where the triangulation of MC33
is not topologically correct. (Custodio et al., 2013)
proposed the improved version C-MC33. In (Lewiner
et al., 2012), an implementation of MC33 using mul-
tiple tables to determine subcases was discussed.
Some methods use critical points of the isosurface
to determine the topology. (Nielson, 2003) presented
an approach with multi-stage decisions that require
multiple tables. (Lopes and Brodlie, 2003) uses addi-
tional shoulder points and inflection points to increase
the geometric accuracy of the triangulation. (Renbo
et al., 2005) proposed a table-free variant of Lopes
and Brodlie’s method that distinguishes cases based
on the number of polygons on cell faces and inflec-
tion points.
(Custodio et al., 2019) presented an alternative
and table-free approach to determine the correct
topology inside a cell. They compute connected
groups of vertices and create a triangulation based on
convex hulls.
(Grosso, 2016) presented a contour-based isosur-
facing method that infers the correct topology inside a
cell from the number and configurations of isosurface
contours on cell faces. In addition, interior points are
computed for some cases and used to decide whether
a tunnel occurs. The occurrence of singular cases was
discussed in (Grosso, 2017).
Other methods rely on subdivisions to resolve
topological ambiguities. (Scheidegger et al., 2010)
used an adaptive regular subdivision scheme while
(Carr and Max, 2010) proposed subdivisions at crit-
ical points of the trilinear interpolant.(Hege et al.,
1997) proposed an algorithm that uses non-binary
classifications of the vertices and assigns them proba-
bilities for interpolation. They also subdivide the cell,
followed by a simplification step.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
332

Another algorithm for isosurface computation is
Marching Tetrahedra (Treece et al., 1999), based on
linear interpolation within the tetrahedra. This results
in a different interpolation and therefore isosurface,
even when a hexahedral mesh is split into tetrahedra.
Recently, neural isosurfacing methods like Neural
Marching Cubes (Chen and Zhang, 2021) or Neural
Dual Contouring (Chen et al., 2022) have gained at-
tention. However, these cannot guarantee topological
correctness due to their probabilistic nature.
(Etiene et al., 2012) proposed a framework to
verify the topological properties of isosurface algo-
rithms, which we will use in Section 4 to test our
method.
3 METHOD
Table-based implementations of topologically correct
Marching Cubes require hand-crafting many individ-
ual triangulations for the different configurations of
corner values and possible topologies of a cell. There-
fore, we strive towards a universal procedural algo-
rithm based on the properties of the trilinear inter-
polant. In contrast to previous work, our method in-
cludes the topologically correct triangulation of sin-
gular cases without increasing in complexity. The
following chapter analyzes the isosurface obtained
by trilinear interpolation and describes its topologi-
cal properties. Afterward, an algorithm is presented
that leverages these insights to generate a procedu-
ral triangulation of the isosurface without relying on
lookup tables.
3.1 Topology of Trilinear Interpolation
To analyze the topology of the trilinear interpola-
tion we consider only a single unit cell for simplic-
ity. Marching Cubes assumes the values inside of a
cell to be a trilinear interpolation of the corner values
f
0
, ..., f
7
defined as
F(u, v, w) =
(1 − u)(1 − v)(1 − w) f
0
+ u(1 − v)(1 − w) f
1
+(1 − u)v(1 − w) f
2
+ uv(1 − w) f
3
+(1 − u)(1 − v)w f
4
+ u(1 − v)w f
5
)
+(1 − u)vw f
6
+ uvw f
7
,
(1)
where (u, v, w) ∈ [0, 1]
3
are the local coordinates of the
cell. We assume w.l.o.g. that the isovalue is zero, so
the isosurface is described by
F(u, v, w) = 0. (2)
Positive values are considered to be on the outside of
the isosurface, and corners of a cell with a positive
or negative value are called positive and negative cor-
ners, respectively.
Previous work showed that the topology of the iso-
surface of a trilinear interpolation can be ambiguous
on the faces of the cell and its interior. Firstly, we
focus on distinguishing different topological cases of
the intersection of the isosurface with a face. In the
following, we consider the face w = 0 with corner val-
ues f
0
, f
1
, f
2
, f
3
. The restriction of Equation (1) to the
plane defined by this face is the bilinear interpolation
F
w=0
(u, v) = (1 − v)((1 − u) f
0
+ u f
1
)
+v ((1 − u) f
2
+ u f
3
),
(3)
which can be written in normal form as
F
w=0
(u, v) = α + η(u − u
0
)(v − v
0
) (4)
with
η = f
0
− f
1
− f
2
+ f
3
(5)
α =
f
0
f
3
− f
1
f
2
η
(6)
u
0
=
f
0
− f
2
η
, v
0
=
f
0
− f
1
η
. (7)
This form shows that the intersection of the isosur-
face with a plane is generally a hyperbola as shown
in Figure 3a with the asymptotes u = u
0
and v = v
0
when α ̸= 0 and η ̸= 0. However, Equation (4) can
degenerate and lead to three other topological cases
on the face that are shown in Figure 3. If α = 0 and
η ̸= 0, the hyperbola collapses to the two lines u = u
0
and v = v
0
in Figure 3b that meet at the center of the
asymptotes (u
0
, v
0
). We call a face with this topology
a singular face and the point (u
0
, v
0
) a singular point
on the face. This point is not necessarily singular in
three dimensions depending on the incident cells.
If η = 0 Equation (4) is no longer defined. Instead,
the bilinear interpolation from Equation (3) degener-
ates to the linear interpolation
F
w=0
(u, v) = f
0
+ u( f
1
− f
0
) + v( f
2
− f
0
), (8)
where the solution to F
w=0
(u, v) = 0 is either a single
straight line visualized in Figure 3c or in the case f
0
=
f
1
= f
2
= f
3
= 0 the solution is the whole plane w = 0
shown in Figure 3d.
(a) hyperbola (b) cross (c) single line (d) plane
Figure 3: The topologies of the isosurface on a face.
The cases where the intersection of the isosurface
with a face is a single line or the whole plane cannot
MCPro: A Procedural Method for Topologically Correct Isosurface Extraction Based on Marching Cubes
333

be ambiguous. However, the hyperbolic and singular
cases have an ambiguous topology because they con-
sist of two branches of the isosurface. From the signs
of the values f
0
, ..., f
3
, it cannot be determined how
the two branches are oriented. In the singular case, the
two branches meet at the center of the asymptotes, but
if we move in the direction orthogonal to the surface,
the two branches will separate or merge, see Figure
10. The correct topology is defined by the limit when
the face is approached from the cell’s interior.
After resolving face ambiguities, we now analyze
interior ambiguities of the trilinear interpolant. Inte-
rior ambiguities can even occur if no faces are am-
biguous. The isosurface can be described in paramet-
ric form by solving Equation (2) for one of u, v, or w,
e.g.
w(u, v) =
auv + bu + cv + d
euv + f u + gv + h
, (9)
where a, ..., h depend on the values at the cell corners
f
0
, ..., f
7
. We look at the critical points’ existence and
positions to determine the topology of the isosurface.
Between critical points and the cell’s boundaries, the
surface is monotonic. The surface defined by w(u, v)
has up to two critical points that satisfy
∂w(u, v)
∂u
=
∂w(u, v)
∂v
= 0. (10)
These critical points are saddle points of the isosur-
face because the determinant of the Hessian is nega-
tive at the critical points, so minima and maxima do
not exist. The same holds for u(v, w) and v(u, w), re-
sulting in up to six critical points of the isosurface.
Because the partial derivatives in two directions are
zero, the saddle points lie on the intersections of two
axis-aligned lines that are part of the isosurface, as
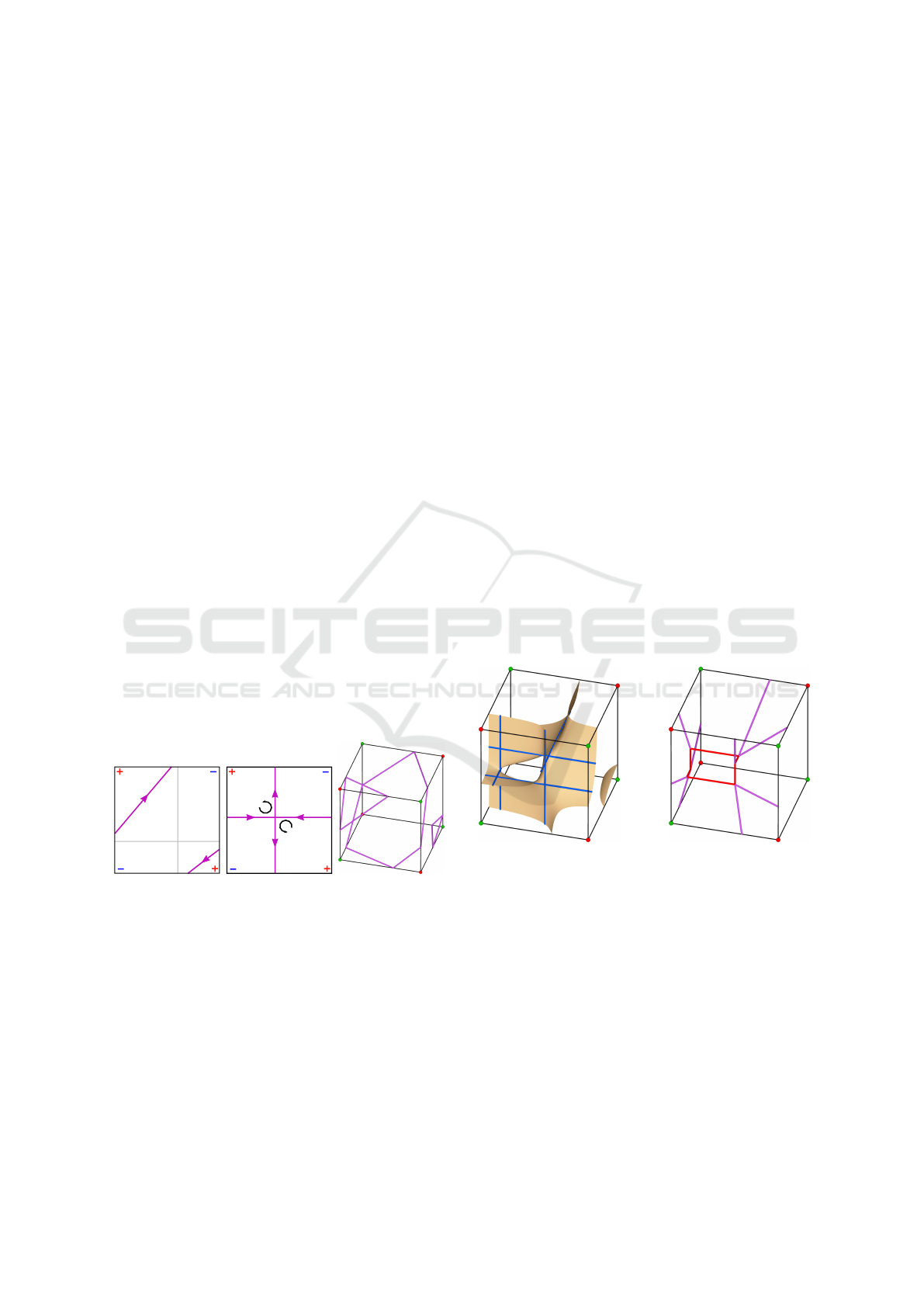
shown in Figure 4a.
(a) (b)
Figure 4: (a) A saddle point is located at the intersection of
two axis-aligned anchor lines shown in blue. (b) The inner
hexagon marked in red consists of six critical points on the
anchor lines forming a cuboid.
We call these axis-aligned lines with constant value
anchor lines. There can be at most six of these anchor
lines. The saddle points are the same ones computed
by (Grosso, 2016) by solving three quadratic equa-
tions. The advantage of the formulation in Equation
(10) is that it is not based on the intersection of the
isosurface with cell faces that can degenerate to the
singular case. If all six critical points exist, they form
six corners of a cuboid, where two diagonally oppo-
site corners are missing. This structure is called De-
Vella’s Necklace (Nielson, 2003) or Inner Hexagon
(Grosso, 2016) and is visualized by the red lines in
Figure 4b. The case of two crossing lines, Figure 3b,
occurs precisely in the case where one or more ver-
tices of the inner hexagon lie on a face of the cell.
3.2 Triangulation Algorithm
Due to the high number of possible combinations of
cell corner values, face ambiguities, interior ambi-
guities, and singularities, storing all potential cases
of triangulations in tables is infeasible. The trian-
gulation is therefore generated procedurally based on
properties of the trilinear interpolation inside a cell.
All configurations are processed similarly without re-
lying on many execution paths for individual edge
cases. For example, cases that contain cell corners
with exactly the isovalue do not require a large in-
crease of handcrafted triangulations as proposed by
(Raman and Wenger, 2008). The algorithm is split
into four stages that analyze features of increasing di-
mensionality of the grid. This enables efficient par-
allelization and reduces duplicate computations. Our
algorithm creates the triangulation based on contours
on the faces and interior of a cell. The isosurface is
represented by oriented segments stored in a halfedge
data structure that allows efficient insertion and up-
dates.
The first three stages of the algorithm are iterating
all cell edges of the grid, then the faces, and lastly,
the cells. While the edges are considered, new ver-
tices are created. When the faces are analyzed, if
the face is singular, a new vertex on the face is cre-
ated, and the vertices are connected to line segments.
While iterating the cells in the third stage, a halfedge
data structure is created by connecting the segments
to form contours, interior vertices are added, and the
interior structure is connected to the contours. In the
final step, the halfedge data structure is triangulated
to create a mesh. In the following, the principal steps
of the algorithm are explained in more detail.
Firstly, all edges are iterated and checked for an
intersection with the isosurface. If the values at the
endpoints of an edge are on different sides of the iso-
surface, a new vertex is created at the position deter-
mined by linear interpolation. If both endpoints of an
edge lie on the isosurface, they are added to the list
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
334
of vertices, and no interpolation is performed. Oth-
erwise, the edge does not intersect the isosurface and
can be ignored.
Next, the faces are considered. The intersection
of the isosurface with a plane can have four different
mathematic descriptions that are distinguished by the
asymptotic decider in Equation (6). Based on these
different topologies, the vertices on a face are con-
nected to segments. Therefore, each face is divided
into quadrants based on the center of the asymptotes
given by Equation (7). The vertices on the face are
sorted into their respective quadrants. The non-empty
quadrants must contain two vertices that are con-
nected by a segment. The singular cases can be solved
similarly by connecting all vertices on the cell’s edges
to the central, singular vertex on the face.
Because the segments are later converted to
halfedges, they must be correctly oriented. Each seg-
ment has a tangential and a normal direction, where
the normal is on the left side of the tangent. Since
we defined positive values as outside the isosurface,
the normal of the line segments should always point
towards a positive corner of the face. The orienta-
tion of the segment is computed based on its normal
direction and the sign of a corner in the same quad-
rant like in Figure 5a. For singular faces, the normal
of the face at the asymptotic center is also used to
decide how the four segments are connected. Con-
nected segments must rotate counter-clockwise for a
face normal facing outwards as shown in Figure 5b.
Repeating this procedure for all faces leads to the seg-
ments in Figure 5c that represent the intersection of
the isosurface with the faces of a cell.
(a) hyperbolic face (b) singular face (c) outer contours
Figure 5: The segments on a face are connected and ori-
ented based on corner values and the face normal to form
contours.
Finally, the segments on the faces are connected to
form contours on the cell faces, and the topology of
the isosurface inside the cell is evaluated. The mesh
inside of a cell is represented by a local halfedge data
structure. The segments generated on the faces of the
cell are inserted and pointers to the next and previ-
ous halfedges are stored. Then, two opposite critical
points are computed by solving the system of equa-
tions (10). The remaining four points of the inner
hexagon shown in Figure 4b are inferred by combin-
ing the coordinates of the two known solutions. The
anchor lines and the hexagon shown in Subsection 3.1
form a skeleton inside the cell that is used to deter-
mine the triangulation. All critical points inside the
cell are added to the list of vertices. The critical points
that lie on the face coincide with the points already
calculated during the face iteration and are therefore
not added to the list. The intersections of an anchor
line with the faces of the cell will always lie on a con-
tour of the exact, trilinear isosurface as can be seen
in Figure 6a. To connect the inner hexagon with the
outer contours, segments are created from every crit-
ical point to the outer vertices according to the skele-
ton of anchor lines. However, the outer end of an an-
chor line generally does not coincide with a contour
vertex. Thus, the vertex that corresponds to the inter-
sected contour and is closest to the intersection point
with the face is chosen instead. This is repeated for
all critical points. Additionally, the segments of the
inner hexagon are added to complete the inner skele-
ton of halfedges shown in Figure 6b. The connectivity
of halfedges at the inner vertices is decided by choos-
ing the surface normal to face outward according to
the interpolated gradient of the function values at that
point. The outer contour is split at intersected ver-
tices and is newly connected to and from the inner
vertices. This way, the created halfedge data structure
describes a polygonal mesh of the isosurface.
(a) (b)
Figure 6: (a) The intersection of the anchor lines with the
faces of the cell is always on the contour of the isosurface.
(b) The contours of the isosurface inside a cell based on the
skeleton of anchor lines.
Because the isosurface is monotonic between critical
points, its topology is equivalent to a disk’s. The re-
sulting polygons described by the halfedge data struc-
ture can therefore be triangulated as disks. This is
done by iteratively replacing two incident halfedges
with the spanned triangle and inserting the third side
as a new halfedge. The resulting mesh can be output
as an indexed face set or a global halfedge data struc-
ture.
This formulation inherently solves many configu-
MCPro: A Procedural Method for Topologically Correct Isosurface Extraction Based on Marching Cubes
335

Figure 7: The halfedge data structure represents the surface
as polygons shown in different colors on the left. The poly-
gons are triangulated to create the final mesh on the right.
rations that previous methods could only solve based
on some decision criteria for the correct topology. For
example, the normals of neighboring saddle points
decide whether a tunnel or disc is created for MC
case 13 because the halfedges will be oriented differ-
ently. From there, the same triangulation algorithm
creates the correct meshes for both topologies instead
of needing to define an explicit case distinction.
4 RESULTS
In this section, we present some results of our new
triangulation algorithm, test the method on real-world
datasets, and show some singular cases of implicitly
defined surfaces for the trilinear interpolant that are
non-manifold. For comparison purposes we use the
MC33 implementation in the scikit library, (van der
Walt et al., 2014).
In contrast to previous work, we focused on the
cases where the intersection of the isosurface with a
cell face is a degenerated hyperbola. Our table-free
method generates topologically correct triangulations
compared to the trilinear interpolant. Some examples
of such cases on one or multiple faces can be seen in
Figure 8. A reference for the exact trilinear isosur-
face is obtained by subdividing each cell at least 100
times and computing the isosurface within the sub-
cells. Tunnels in the isosurface are correctly repre-
sented in the mesh created by our method, even for
the singular cases where one or more saddle points lie
on the faces of the cell. MC33 can not produce a topo-
logically correct mesh for these cases. For the middle
case in Figure 8 with three singular faces next to each
other, MC33 creates a tunnel with triangles on the
cell faces, leading to an incorrect non-manifoldness
when connected to the neighboring cells. Our use of
a halfedge data structure prevents this by describing
the face neighborhood with opposite halfedges.
We verified our algorithm with the test datasets
provided by (Etiene et al., 2012). The datasets contain
Table 1: The number of mesh elements of the human skull
(isovalue 950) created by our method, MC33, and MC.
Method Ours MC33 MC
Vertices 1213089 1102349 1093007
Triangles 2434920 2219708 2212832
10000 single-cell examples, and 10000 closed sur-
faces together with precomputed topological invari-
ants. To compare the topology of the meshes gener-
ated by our method to the trilinear interpolant, we use
Betti numbers b
i
(Konkle et al., 2003). Only b
0
, b
1
,
and b
2
can be non-zero in three-dimensional space.
Here, b
0
describes the number of connected compo-
nents. b
1
counts the one-dimensional holes of an ob-
ject and can be computed as b
1
= 2g, where g is the
genus of the surface (Theisel, 2002). The number b
2
represents the regions of space enclosed by the sur-
face. We additionally used the Euler characteristic
χ = V − E + F as a topological invariant for compar-
isons. Our method generates isosurfaces with the cor-
rect topology in all 20000 examples provided by the
test datasets. Note that the test datasets did not con-
tain any singular faces.
We used our algorithm to compute the isosurface
from some real-world datasets of a human skull, a
mecanix, a Porsche, and a carp, as shown in Figure 9.
CT and MRI datasets contain only 16-bit integer data
values, which increases the probability for singu-
lar faces and non-manifold cases. We analyzed 22
datasets of which all but one contain singular faces
and therefore require special handling of these cases.
Our algorithm produces a more detailed mesh be-
cause critical points are included in the triangulation.
Therefore, the number of vertices and triangles in-
creases compared to MC33. As Table 1 shows for the
example of the human skull dataset, our method gen-
erates approximately 10 % more vertices and faces
than the standard Marching Cubes and the MC33 al-
gorithms.
We now look at non-manifoldness occurring in the
trilinear interpolant. The face of a cell whose inter-
section with the isosurface is a degenerated hyperbola
contains a vertex on the face. Although the vertex is
singular on the face, it can be part of a continuous
surface through the two incident cells where the ver-
tex is not singular in three dimensions. In Figure 10,
we see on the left that the cross lies on a single branch
of the isosurface, and thus, the singular point is mani-
fold in 3D. On the other side, on the right, we see two
branches of the isosurface touch at the singular point.
The singular point corresponds to a singularity of the
implicit surface, creating a non-manifold vertex.
The previous example shows that the trilinear in-
terpolant can be singular on faces, edges, and cor-
ners, for which the topologically correct triangulation
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
336
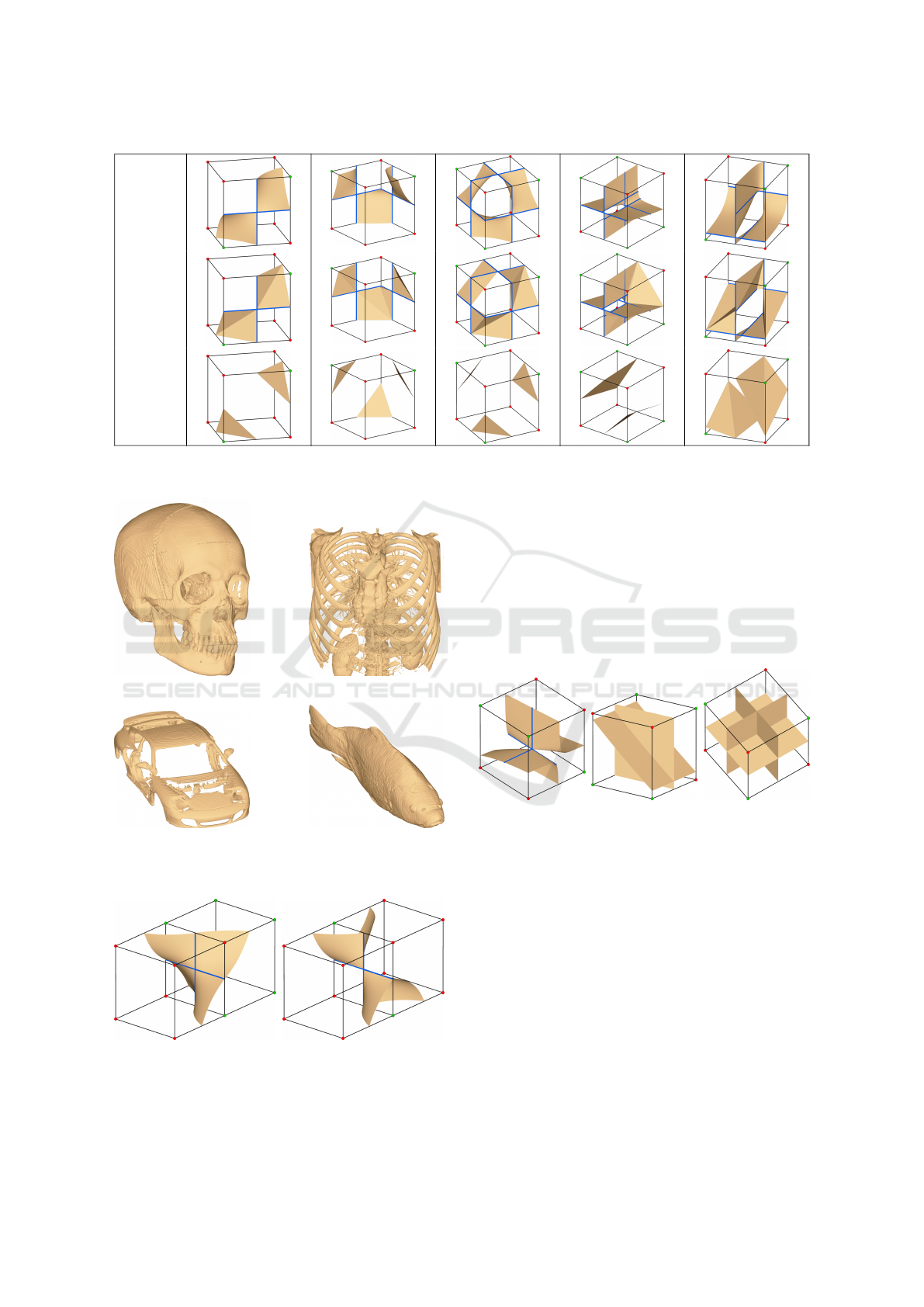
Trilinear
Ours
MC33
Figure 8: The triangulations created by subdividing and interpolating the grid values, our method, and MC33 for cases with
at least one degenerated hyperbola.
(a) Human skull (b) Mecanix
(c) Porsche (d) Carp
Figure 9: Meshes generated with our method from a selec-
tion of real-world datasets.
Figure 10: Two cells that share a singular face can either re-
sult in a continuous surface (left) or a singular surface with
a non-manifold vertex (right).
is non-manifold. As seen in Figure 11, Singularity
can also occur within a cell. A singular point oc-
curs if all six saddle points coincide and the tunnel
collapses to a single point in space. In this case, the
isosurface and the topologically correct triangulation
are non-manifold. The case of an isosurface, which is
non-manifold along an edge, occurs if the scalar val-
ues of the cell vertices are symmetric in such a way
that an axis-aligned plane is part of the isosurface.
Figure 11: Non-manifold vertices and edges can occur in
the trilinear interpolant.
The geometric accuracy of the triangulation of the iso-
surface within a cell can be improved by edge flips for
some cases where the three-dimensional shape of the
polygons that make up the isosurface is not optimal.
The topologically correct triangulation of cases con-
taining non-manifold edges, such as in Figure 11, will
be the subject of future work.
5 CONCLUSIONS
We presented an isosurface method that generates
meshes topologically equivalent to the isosurface of
the trilinear interpolation of a scalar field. The method
does not rely on lookup tables like many previous
MCPro: A Procedural Method for Topologically Correct Isosurface Extraction Based on Marching Cubes
337

variants of Marching Cubes. Instead, it generates the
triangulation in a procedural algorithm based on a lo-
cal halfedge data structure. The correct topology is
determined by the contours on the cell faces and the
configuration of critical points inside the cell. Com-
pared to previous methods, our approach generates
topologically correct triangulations for cases where
the intersection of the trilinear interpolant and a cell
face is not hyperbolic but degenerates into two cross-
ing lines. Our method creates a more detailed mesh
by making use of critical points of the surface. We
showed that an isosurface based on trilinear interpo-
lation can be non-manifold both inside of a cell and
on the boundary between cells, so a topologically cor-
rect triangulation should include these non-manifold
features.
ACKNOWLEDGEMENTS
This work was funded by the Deutsche Forschungs-
gemeinschaft (DFG, German Research Foundation) –
502500606.
REFERENCES
Carr, H. and Max, N. (2010). Subdivision Analysis of the
Trilinear Interpolant. IEEE Transactions on Visualiza-
tion and Computer Graphics, 16(4):533–547.
Chen, Z., Tagliasacchi, A., Funkhouser, T., and Zhang, H.
(2022). Neural dual contouring. ACM Trans. Graph.,
41(4):104:1–104:13.
Chen, Z. and Zhang, H. (2021). Neural marching cubes.
ACM Trans. Graph., 40(6):251:1–251:15.
Chernyaev, E. (1996). Marching Cubes 33: Construction of
Topologically Correct Isosurfaces. No. CERN-CN-95-
17.
Custodio, L., Etiene, T., Pesco, S., and Silva, C.
(2013). Practical considerations on Marching Cubes
33 topological correctness. Computers & Graphics,
37(7):840–850.
Custodio, L., Pesco, S., and Silva, C. (2019). An extended
triangulation to the Marching Cubes 33 algorithm.
Journal of the Brazilian Computer Society, 25(1):6.
Etiene, T., Nonato, L. G., Scheidegger, C., Tienry, J., Pe-
ters, T. J., Pascucci, V., Kirby, R. M., and Silva, C. T.
(2012). Topology Verification for Isosurface Extrac-
tion. IEEE Transactions on Visualization and Com-
puter Graphics, 18(6):952–965.
Grosso, R. (2016). Construction of Topologically Correct
and Manifold Isosurfaces. Computer Graphics Forum,
35(5):187–196.
Grosso, R. (2017). An asymptotic decider for robust
and topologically correct triangulation of isosurfaces:
topologically correct isosurfaces. Proceedings of the
Computer Graphics International Conference, pages
1–5.
Hege, H.-C., Stalling, D., Seebass, M., and Z
¨
ockler, M.
(1997). A generalized marching cubes algorithm
based on non-binary classifications. SC-97-05.
Konkle, S. F., Moran, P. J., Hamann, B., and Joy, K. I.
(2003). Fast methods for computing isosurface topol-
ogy with betti numbers. In Data Visualization: The
State of the Art, pages 363–375.
Lewiner, T., Lopes, H., Vieira, A., and Tavares, G. (2012).
Efficient Implementation of Marching Cubes’ Cases
with Topological Guarantees. Journal of Graphics
Tools, 8.
Lopes, A. and Brodlie, K. (2003). Improving the robust-
ness and accuracy of the marching cubes algorithm
for isosurfacing. IEEE Transactions on Visualization
and Computer Graphics, 9(1):16–29.
Lorensen, W. E. and Cline, H. E. (1987). Marching cubes:
A high resolution 3D surface construction algorithm.
In Proceedings of the 14th annual conference on
Computer graphics and interactive techniques, SIG-
GRAPH ’87, pages 163–169.
Natarajan, B. K. (1994). On generating topologically con-
sistent isosurfaces from uniform samples. The Visual
Computer, 11(1):52–62.
Newman, T. S. and Yi, H. (2006). A survey of the marching
cubes algorithm. Computers & Graphics, 30(5):854–
879.
Nielson, G. (2003). On Marching Cubes. IEEE Trans-
actions on Visualization and Computer Graphics,
9:283–297.
Nielson, G. and Hamann, B. (1991). The asymptotic de-
cider: resolving the ambiguity in marching cubes. In
Proceeding Visualization ’91, pages 83–91.
Nielson, G., Huang, A., and Sylvester, S. (2002). Approxi-
mating normals for marching cubes applied to locally
supported isosurfaces. In IEEE Visualization, 2002.
VIS 2002., pages 459–466.
Raman, S. and Wenger, R. (2008). Quality Isosur-
face Mesh Generation Using an Extended Marching
Cubes Lookup Table. Computer Graphics Forum,
27(3):791–798.
Renbo, X., Weijun, L., and Yuechao, W. (2005). A Robust
and Topological Correct Marching Cube Algorithm
Without Look-Up Table. In The Fifth International
Conference on Computer and Information Technology
(CIT’05), pages 565–569.
Scheidegger, C., Etiene, T., Nonato, L. G., and Silva, C. T.
(2010). Edge Flows: Stratified Morse Theory for Sim-
ple, Correct Isosurface Extraction. SCI Institute, Uni-
versity of Utah, SCI Technical Report UUSCI-2010-
002.
Stahl, J. (2025). MCPro [Software]. Github.
https://github.com/JulyCode/MCPro.
Theisel, H. (2002). Exact Isosurfaces for Marching Cubes.
Computer Graphics Forum, 21(1):19–32.
Treece, G. M., Prager, R. W., and Gee, A. H. (1999). Regu-
larised marching tetrahedra: improved iso-surface ex-
traction. Computers & Graphics, 23(4):583–598.
van der Walt, S., Sch
¨
onberger, J. L., Nunez-Iglesias, J.,
Boulogne, F., Warner, J. D., Yager, N., Gouillart,
E., Yu, T., and the scikit-image contributors (2014).
scikit-image: image processing in Python. PeerJ,
2:e453.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
338
