
Jetson’s View: Designing Trustworthy Air Taxi Systems
Isadora Ferr
˜
ao
1 a
, Jos
´
e Cezar de Souza Filho
3
, K
´
athia Oliveira
3
, David Espes
2
, Catherine Dezan
2
,
Mohand Hamadouche
2
, Rafik Belloum
3
, Bruna Cunha
1
and Kalinka Branco
1 b
1
Institute of Mathematics and Computer Science, Universidade de S
˜
ao Paulo, Brazil
2
Lab-STICC - CNRS, Universit
´
e de Bretagne Occidentale, France
3
Univ. Polytechnique Hauts-de-France, LAMIH, UMR CNRS 8201, F-59313, France
Keywords:
Autonomous Vehicles, Trustworthy Interface, Air Taxi.
Abstract:
As the world’s population grows and urbanization accelerates, the need for sustainable urban mobility solu-
tions becomes more and more important. Smart cities, considered the answer to urban challenges, are ready
to integrate innovative modes of transport, such as electric vertical take-off and landing vehicles (eVTOLs),
into their fabric. This paper discusses challenges and opportunities presented by eVTOLs, with a particular
focus on safety, security, and user experience. Based on a resilient architecture proposed by STRAUSS, which
integrates safety and fault tolerance measures, we characterize a framework for safe and reliable eVTOL oper-
ations in smart cities. In addition, we investigate the design of user interfaces for autonomous eVTOL systems
by employing personas and use case scenarios. A interface’s prototype illustrates the adaptability and func-
tionality of the interface in real-life scenarios, meeting the diverse needs of users and promoting trust in future
urban transport systems. Through this interdisciplinary approach, this research aspires to advance the adoption
of eVTOLs and enhance urban mobility at the dawn of the smart city’s future.
1 INTRODUCTION
According to the United Nations, 55% of the world’s
population currently lives in urban areas, which is
projected to increase to 68% by 2050 (Ferr
˜
ao et al.,
2022a; Nations, 2018). In this context, urban plan-
ning is crucial for ensuring quality of life while pro-
moting sustainable economic development and infras-
tructure capable of meeting present and future de-
mands. Smart cities offer innovative solutions to ad-
dress the challenges of urban mobility. Electric verti-
cal takeoff and landing vehicles (eVTOLs), often re-
ferred to as air taxis, stand out among them. These
aircraft aim to provide safe, sustainable, and accessi-
ble air transportation for passengers and cargo, as well
as emergency services within and between metropoli-
tan areas and hard-to-reach peripheral regions.
Unlike conventional transportation systems, such
as cars or trains, which are limited by ground traffic
space, air taxis do not occupy spaces within congested
traffic areas (Ferr
˜
ao et al., 2020b). Air mobility so-
lutions offer greater spatial and temporal flexibility,
a
https://orcid.org/0000-0002-0612-486X
b
https://orcid.org/0000-0001-6816-208X
reduced congestion, and less user stress. Designed
for vertical takeoff and landing, these aircraft elimi-
nate the need for long runways required by traditional
airplanes. Additionally, air taxis are powered by elec-
tric motors and batteries, making them more energy-
efficient and emitting fewer pollutants than traditional
aircraft. However, their practical implementation and
deployment face various challenges, especially con-
cerning safety, security, and passenger trust, which
are also recurrent issues in other aircraft types.
Passenger mistrust in adopting air transportation
systems is often fueled by concerns regarding about
safety and reliability, which are frequently exacer-
bated by past incidents involving conventional air-
planes and mistrust in automated systems. Research
shows that trust is significantly influenced by design
and aspects of appearance, transparency, ease of use,
communication style and user control all play a cru-
cial role in shaping user trust (Hoff and Bashir, 2015).
Moreover, introducing emerging technologies such as
connected air taxis adds a new layer of concern. This
connectivity exposes aircraft to potential cybersecu-
rity vulnerabilities, such as network attacks on the ve-
hicle and its sensor systems, which can heighten resis-
tance and discomfort in adopting these technologies.
Ferrão, I., Filho, J. C. S., Oliveira, K., Espes, D., Dezan, C., Hamadouche, M., Belloum, R., Cunha, B. and Branco, K.
Jetson’s View: Designing Trustworthy Air Taxi Systems.
DOI: 10.5220/0013279300003929
In Proceedings of the 27th International Conference on Enterprise Information Systems (ICEIS 2025) - Volume 2, pages 517-524
ISBN: 978-989-758-749-8; ISSN: 2184-4992
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
517

In this regard, conventional airplane interfaces fail to
present flight information in a manner that instills user
confidence. Additionally, existing architectures ad-
dress only safety requirements, disregarding security
issues, while both are equally important for user ac-
ceptability (EASA, 2021). Neglecting either of these
requirements can undermine the trustiness and effec-
tiveness of the systems, jeopardizing the company’s
reputation.
This article aims to contribute to the state of the art
through two pillars. Firstly, we propose STRAUSS, a
resilient architecture for air taxi operations in smart
cities. STRAUSS is a robust, fault-tolerant archi-
tecture capable of operating under adverse and in-
tentional conditions. It integrates security detection
and protection modules, decision-making, and flex-
ibility to achieve these characteristics. STRAUSS
is designed to automatically adapt to detect fail-
ures and attacks, making real-time decisions to en-
sure mission integrity. We propose incorporating the
decision-making mechanism with the mission plan-
ning of these vehicles. According to the aircraft’s au-
tonomy level, the mission is deployed to match differ-
ent scenarios an air taxi can encounter. Secondly, we
present new and initial ideas for air taxi system user
interfaces, based on simple yet realistic scenarios de-
signed to inspire user trust. To this end, these con-
cepts are defined based on the STRAUSS architecture
and the mission planning objectives. Furthermore,
since many user groups still approach aircraft auton-
omy with apprehension and skepticism (Lotz et al.,
2023), there is a gap in the literature regarding ap-
plying Human-Computer Interface (HCI) principles
to the context of air taxis within intelligent systems.
As air taxi systems become increasingly autonomous,
relying on decision-making based on artificial intelli-
gence algorithms, it becomes essential to ensure that
decisions are transparently explained to users. This
instills confidence and trust in passengers regarding
the reliability of the system. Therefore, integrating an
interface that prioritizes trust within the air taxi sys-
tem enhances its reliability and dependability, foster-
ing positive experiences and building long-term trust
among passengers.
This work is organized as follows. We discuss re-
lated work in Section 2 and introduce STRAUSS in
Section 3. Then, we present the methodology for de-
signing a interface prototype in Section 4. Finally, we
conclude and outline future perspectives in Section 5.
2 RELATED WORK
Despite various models and system architectures in
the existing literature, adequately encompass all en-
compass all the requirements for creating generic and
safe air vehicles. Most architectures primarily focus
on defining and developing specialized air vehicles
(Ferr
˜
ao et al., 2022b; Siewert et al., 2019). How-
ever, they can serve as reference for replicating se-
curity techniques in air taxi architectures, especially
considering the substantial ratio of Unmanned Aerial
Vehicles (UAVs) to air taxis. Among these architec-
tures, there are dedicated UAVs, such as HAMSTER
(Pigatto, 2017), STUART (Ferr
˜
ao et al., 2020a) and
ContainerDrone (Siewert et al., 2019), each employ-
ing different approaches.
The Health, Mobility, and Safety Based Data
Communications Architecture (HAMSTER) is a data
communication architecture designed to improve
overall system mobility and security (Pigatto, 2017).
Despite significant efforts with HAMSTER, the au-
thors do not consider the resiliency aspects of provid-
ing autonomous vehicles.
In (Ferr
˜
ao et al., 2020a), the authors present STU-
ART, a resilient architecture to dynamically man-
age UAV networks under attack. This architecture
one of the few that consider safety and security as
unified concepts. It employs decision-making tech-
niques through a state machine and achieves re-
silience through restoration techniques and histori-
cal data stored in a reference base. It is notewor-
thy that while ensuring safety requirements has been
a primary concern in the design and development
of UAV systems, the communication of these vehi-
cles with external entities introduces vulnerabilities.
Some architectures intended to meet security require-
ments may have inherent flaws, and conversely, safety
requirements may also contain security weaknesses.
Therefore, it is essential to address both security and
safety in a UAV architecture. In that sense, STUART
is the only architecture that focuses on these vulner-
abilities. However, it is still in the simulation testing
phase, relies heavily on human intervention through-
out all test phases, and has not yet been tested in a real
avionics environment.
Likewise, (Chen et al., 2019) presented the Con-
tainerDrone Framework that proposes resilient con-
trol of Denial of Service (DoS) attacks for real-
time UAV systems using containers. The frame-
work has proven reliable in protecting against DoS
attacks launched within the container, limiting the at-
tacker’s access to critical system resources. Experi-
ments showed that the proposed framework is effec-
tive against various types of DoS attacks. Neverthe-
ICEIS 2025 - 27th International Conference on Enterprise Information Systems
518

less, the authors did not consider physical and soft-
ware component failures caused by bugs, logical er-
rors, or any other attack besides DoS.
Although the related works discussed so far have
contributed to characterizing architectures for aerial
vehicles, it is imperative to note that a limited por-
tion of these efforts addresses the specific complex-
ities associated with air taxis. The inherent pecu-
liarities of air taxis, such as their imminent integra-
tion into densely populated urban environments, de-
mand meticulous handling. Such environments re-
quire strong integration with existing infrastructure
and air traffic management systems, making safety
and resilience a critical and complex requirements.
Additionally, aspects such as redundancy and fault
tolerance play a central role in ensuring the safety of
both occupants on board and people on the ground.
Air taxi architectures must also be sensitive to
long-term maintenance and reliability. The complex
nature of the technologies employed in these vehicles
requires robust strategies to ensure that the systems
remain operational and safe over time. In particular,
the ability to make concise and real-time decisions
during missions is a crucial characteristic to consider
and is still a gap little explored in the literature. Fur-
thermore, the effectiveness of an architecture depends
not only on its technical functionality but also on in-
tuitive user interfaces to ensure an optimized and reli-
able user experience.
Regarding HCI, several studies have been ded-
icated to the design and evaluation of autonomous
cars, exploring aspects related to user experience, in-
terface design, and passenger well-being. For exam-
ple, research on user experience has examined pas-
senger satisfaction, perceived safety, and comfort dur-
ing autonomous vehicle journeys (Ranscombe et al.,
2019). Furthermore, studies have considered user de-
sign for drivers, pedestrians, and other public roads
users, aiming to ensure safety and efficiency in urban
traffic (Verma et al., 2019; Meurer et al., 2020).
Among the approaches to interaction design,
metaphors have been explored to make interactions
with autonomous vehicles more intuitive and under-
standable for users (Str
¨
omberg et al., 2017). Ad-
ditionally, there is a growing interest in evaluating
passenger well-being during journeys in autonomous
vehicles, considering aspects such as physical com-
fort, relaxation, and stress minimization (Sauer et al.,
2021). However, as already mentioned, there is a gap
in the literature regarding applying these HCI princi-
ples in the context of air taxis within intelligent sys-
tems. As air taxi systems become autonomous, it is
essential to ensure that decisions are transparently ex-
plained to users. This not only fosters passenger trust
in the system but also enhances their understanding
of how it operates and responds to various situations.
Therefore, it is important to investigate the design of
interfaces that effectively convey the decisions and
actions of air taxi systems to users, presenting in-
formation about planned routes, weather conditions,
safety protocols, and emergency procedures in a clear
and accessible manner (de Souza Filho et al., 2024;
Muralidhar et al., 2023).
3 ReSilienT aiR TAXIS architectUre
FOR SMART CITIES (STRAUSS)
STRAUSS is a resilient, robust, and fault-tolerant
architecture for aerial taxis operating in adverse
conditions, whether intentional or unintentional.
STRAUSS dynamically adapts its mission, sharing
information with other aircraft, consisting of three
main modules: detection, decision-making, resilience
and Jetson’s interface.
3.1 Detection’s Module
The ability of an avionic architecture to automati-
cally identify impending failures in aircraft at early
stages is crucial, as it prevents costly and potentially
catastrophic system failures, ensuring greater safety
and reliability of components. This, in turn, reduces
damage and operational costs. In this regard, the
detection module of STRAUSS plays a fundamental
role in the reliability process, being responsible for
identifying issues at safety (physical security) (Ferr
˜
ao
et al., 2023) and security (computational security) lev-
els (Ferr
˜
ao et al., 2024a).
Since STRAUSS focus on detecting issues from
both safety and security perspectives, it stands apart
from other architectures described in the literature.
This stems from the fact that traditional airplanes pri-
marily focused on physical safety, prioritizing struc-
tural integrity and proper functioning of mechanical
systems. However, security has become an equally
important concern with the emergence of autonomous
aerial vehicles and the increasing integration of digi-
tal technologies such as communication systems and
computer control.
Currently, concerning security, STRAUSS en-
compasses the detection of the most recurrent attacks
on aircraft, namely GPS Spoofing and GPS Jamming.
GPS Spoofing is a technique in which false GPS sig-
nals are sent to the aircraft, causing it to calculate an
incorrect position. GPS Jamming involves the emis-
sion of radio signals that interfere with the aircraft’s
Jetson’s View: Designing Trustworthy Air Taxi Systems
519

GPS receiver, preventing it from determining its posi-
tion. Regarding safety, STRAUSS detects seven criti-
cal failures that make up the structural and operational
integrity of aircraft, such as engine failures, eleva-
tor failures, left aileron failures, right aileron failures,
failures in both ailerons, left rudder failures and right
rudder failures.
The algorithms and techniques used to detect
safety and security in STRAUSS are based on arti-
ficial intelligence methodologies that guarantee the
early identification of failures and attacks with an ac-
curacy greater than 90%, providing a quick and effi-
cient response. Specifically, STRAUSS employs ma-
chine learning models, such as Random Forests and
Boosting variations, for anomaly detection, combined
with simulated and real data to increase the reliabil-
ity of detections. These methods have been carefully
integrated into STRAUSS to ensure air taxis’ safe
and reliable operation in unpredictable urban environ-
ments. For more details on the technical implementa-
tion, see the following: (Ferr
˜
ao et al., 2024b)
3.2 Decision-Making’s Module
Air taxis must be able to continually adapt to missions
and effectively detect unexpected internal problems or
external threats. In this sense, STRAUSS proposes
an architecture for autonomous vehicles capable of
making appropriate decisions in real-time, ensuring
the successful fulfillment of their mission. STRAUSS
considers mission objectives and adjusts its actions
according to random events related to mission con-
text, system-wide integrity, mission safety and secu-
rity, and risk management. It is important to empha-
size that the STRAUSS decision-making process re-
lies significantly on the detection module to determine
the appropriate time for decisive intervention.
The current STRAUSS study addresses the
decision-making mechanism through MDP. MDPs
provide a mathematical approach to modeling
decision-making in scenarios where outcomes are in-
fluenced by both randomness and partly by the ac-
tions of a decision-maker. This framework is suited to
the dynamic and uncertain environment in which air
taxis operate. In this scenario, the state space encom-
passes all possible aircraft statuses, including sensor
readings and detected faults, while the action space
consists of all possible maneuvers and responses that
the system can perform. This STRAUSS module uses
reinforcement learning algorithms to optimize policy
for MDPs. Algorithms such as Q-learning and Deep
Q-Networks (DQN) are employed to learn the opti-
mal actions in each state to maximize the expected
cumulative reward.
3.3 Resilience’s Module
According to (Hollnagel et al., 2006), resilience is
the ability to return to its original state after defor-
mation. The STRAUSS resilience module communi-
cates directly with the decision-making module and is
invoked whenever any safety or security action needs
to be applied. The resilience module is responsible
for recovering and restoring the air taxi if it is sub-
jected to an attack or a failure. STRAUSS incorpo-
rates this module to stabilize the functional level of
the air taxi system even in successful operations. The
module ensures that the system continues to function
even if it is subjected to a successful attack, incorpo-
rating techniques that allow the restoration of the air-
craft or an emergency landing to guarantee the physi-
cal and computational integrity of the vehicle.
The STRAUSS resilience module features fault
containment isolation, recovery protocols, redun-
dancy management, post-incident monitoring, analy-
sis and learning, emergency landing and shutdown,
and communication with other elements. For fault
isolation and containment, upon detecting a fault or
security breach, the resilience module isolates the af-
fected components to prevent the issue from spread-
ing to other parts of the system. This containment
strategy helps maintain overall system stability and
functionality. Additionally, the module includes a set
of predefined recovery protocols tailored to different
types of failures and attacks. For instance, the sys-
tem activates a secondary power source in the event
of an engine failure or switches to backup communi-
cation channels during an attack. To increase relia-
bility, the resilience module leverages redundant sys-
tems and components. STRAUSS ensures continu-
ous operation by maintaining backup systems that can
take over in the event of a primary system failure. Af-
ter dealing with a failure or attack, the resilience mod-
ule conducts an analysis to understand the root cause
and enhance future responses. This involves record-
ing incident data, evaluating system performance, and
updating recovery protocols.
Finally, the resilience module prioritizes passen-
ger and vehicle safety in scenarios where recovery is
impossible. It can perform emergency landing proce-
dures by selecting the safest location based on real-
time data. Additionally, it can perform a controlled
shutdown of critical systems to prevent further dam-
age.
ICEIS 2025 - 27th International Conference on Enterprise Information Systems
520

4 INSIGHTS OF JETSON’S USER
INTERFACE
In this section, we present a scenario designed to gain
insights into the interface of future autonomous air
taxi systems, intended for use by citizens for short
trips. As noted by the European Union Aviation
Safety Agency, potential users of Urban Air Mobil-
ity (UAM) are likely to prioritize safety, reliability,
predictability, and ease of use. While affordability
and convenience are also mentioned, they fall outside
the scope of the system interface (EASA, 2021). Ac-
cording to (Hoff and Bashir, 2015), factors such as
appearance, transparency, communication style, and
user control are crucial in autonomous vehicles. Al-
though the STRAUSS architecture emphasizes safety,
reliability, and security, it is essential that the inter-
faces effectively convey these attributes to the end
user.
To explore and propose an end-user-interface, we
defined two personas (Nielsen, 2019) and, based on
their needs, designed two scenarios of use, which are
detailed in Section 4.1. These initial concepts will be
further explored in future work through usability tests.
4.1 Defining Personas for Air Taxi
Systems
A persona is a fictitious representation of an appli-
cation user (Nielsen, 2019), created by defining the
characteristics, needs, and objectives of real users.
Developing personas aims to humanize and better un-
derstand the target audience, allowing us to design
solutions that meet users’ specific needs and prefer-
ences. With the idea of autonomous air taxi systems,
we defined the two following personas:
• Jane Jetson – Jane is always interested in new
technologies and is open to trying new experi-
ences. She works in digital marketing and plans
to use air taxis for her holiday trips. Although
Jane has no piloting experience, she is familiar
with conventional airplanes. In the event of an
emergency, Jane wants to understand what is hap-
pening to feel safe, but she lacks the knowledge to
grasp all the technical details.
• George Jetson – George is an economist who
works for a multinational company, and traveling
is a part of his job. He is a flight enthusiast with
amateur flying experience who enjoys visiting the
pilot’s cabin to follow the journey on the in-flight
panels. He plans to use air taxis for various pur-
poses, including commuting to work and going on
holidays. In the event of an emergency, George
wants to understand what happened, along with
the measures being taken to address the situation.
4.2 Scenarios of Use – Activity
Diagrams and Prototype Interface
Based on the two personas, two scenarios of use were
defined as activity diagrams (OMG, 2017) to support
the definition of possible user interfaces. We detail
each scenario as follows.
Scenario 1 – Jane decides to travel to Nice for the
weekend after a tiring week. It starts when the user
(Jane) takes an air taxi in Lille (Fig. 1). Once seated
inside the aircraft, the system displays the dashboard,
and the flight begins. After a while, Jane selects the
stop-over option to pick up a friend in Lyon, France.
Thus, the system decides if the stop-over is safe asks
the Control Tower for authorization, which may or
may not be granted. The system displays the result,
adapts the interface accordingly, and continues the
journey. The system continuously refreshes the dash-
board with the position from where it is being from
which is flying until it reaches its destination (Nice).
The first scenario exemplifies a successful flight
with no incidents. As illustrated in Fig. 1, the inter-
face features a straightforward communication style
that aligns well with Jane’s profile. Additionally,
users can personalize their routes by adding strategic
stops, providing a sense of control. Transparency is
emphasized through all information displayed along-
side the map, including system health (battery, en-
gine, elevator, rudder, and aileron), detected issues,
and feeds from front, rear, and side cameras. The
interface cues are designed to provide information
that enhances users predictability and reassures them
about the safety of the flight.
We designed interfaces as high-fidelity mock-ups,
which serve as a detailed visual representation of the
interface by simulating the expected design and fea-
tures of the end product (Wiegers and Beatty, 2013),
using support design tools such as Figma
1
. Fig. 2
presents the high-fidelity mock-up for scenario 1.
Scenario 2 – George planned a trip to Porto Ale-
gre to visit relatives and decided to take an air taxi
(Fig. 3). Once seated, the system displays the dash-
board (as shown in Fig. 2(a)). The journey begins, but
at some point, an attacker executes a GPS Spoofing on
the aircraft. At this moment, the dashboard displays
1
The elements used to create the mock-ups were
retrieved as follows: icons from Figma Community
(https://www.figma.com/community), geolocation from
Google Maps (https://www.google.com/maps), and
unlicensed pictures for cameras from Google Images
(https://www.google.com.br/imghp).
Jetson’s View: Designing Trustworthy Air Taxi Systems
521
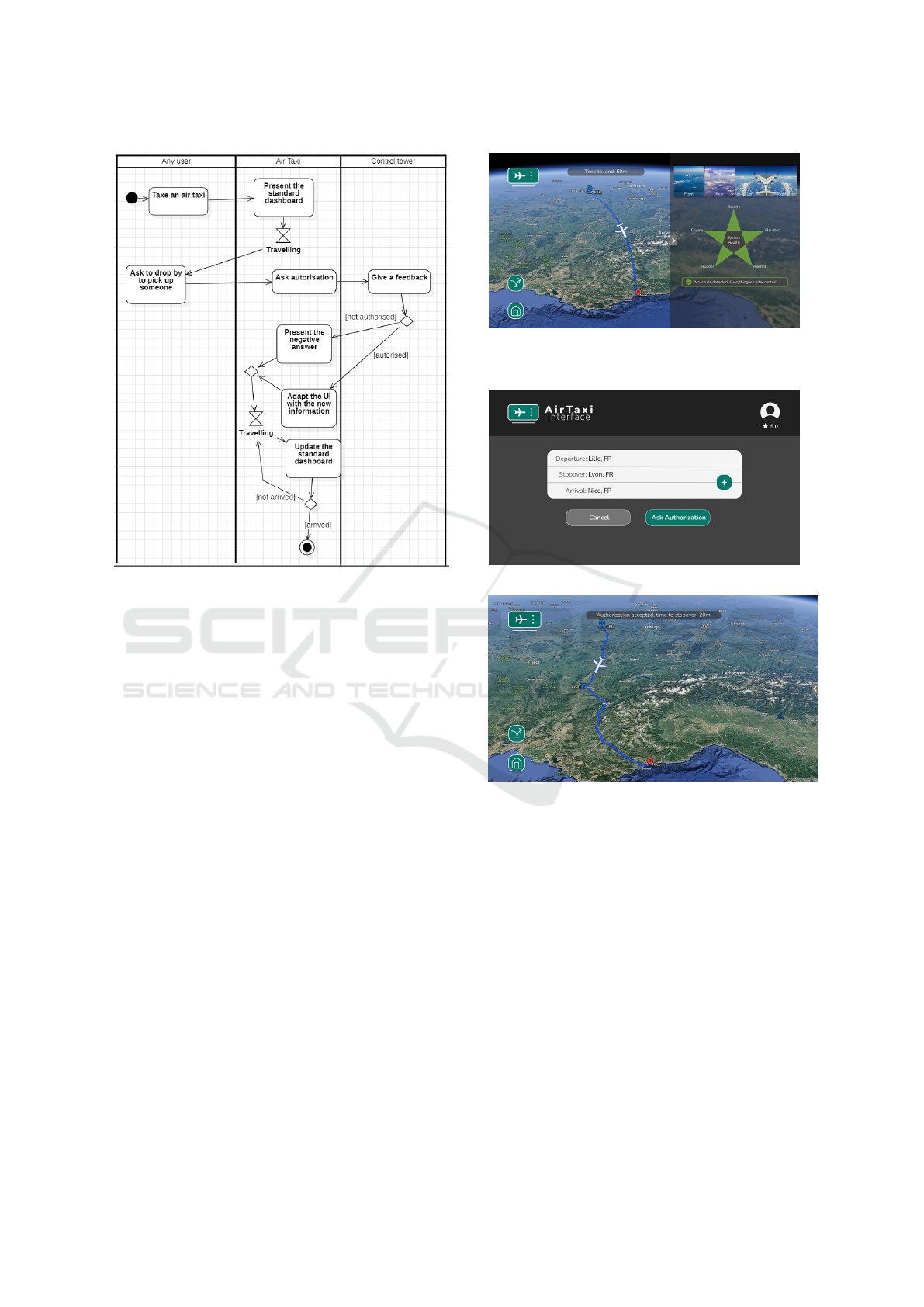
Figure 1: Scenario of use 1 - Jane Jetson’s journey.
a completely different situation: the aircraft appears
to be flying over Europe, while it is actually in South
America (Brazil) (Fig. 4(a)). The air taxi system an-
alyzes the situation, identifies the attack, and initiates
the decision-making process. As the battery is not full
(indicated in Fig. 4(b) as a yellow star), the decision is
made to change direction and execute an emergency
landing at the nearest location. Authorization is re-
quested from the Control Tower, which is granted.
The interface provides a one-level textual explana-
tion “The air taxi is conducting an security landing.
Everything is under control. More information will
be provided by aircraft attendants after landing.”. At
this point, George selects the option to find more de-
tails. Thus, the decisions are explained through three
levels of progressive disclosure (Springer and Whit-
taker, 2019) presented one at a time as requested by
the user. First, the explanation unveils the detected
attack (see message (1) in Fig. 4(b)). Second, if the
user ask for more details, it reveals the causes of the
attack, including the spotted location and time (mes-
sage (2) in Fig. 4(b)). Finally, when the user request
one more detail, the explanation indicate the decision
(i.e., emergency landing) (message (3) in Fig. 4(b))
and its reasoning.
In the second scenario, the explanations were tai-
lored specifically for users with piloting experience,
like George. For users such as Jane, however, these
details may not only be unnecessary but could also
(a) Dashboard containing stopover button; time to land;
cameras; degrees of battery, engine, elevator, rudders, and
ailerons; and diagnosis.
(b) Screen to request authorization for a stopover.
(c) Authorization was granted, and the dashboard was updated.
Figure 2: High-fidelity mock-up for the scenario of use 1.
hinder their experience. The scenarios illustrate the
importance of defining user profiles prior to the flight,
as communication style and transparency must be
aligned with user needs. George feels comfortable
with additional information, as he understands tech-
nical terms and the decision-making process, unlike
typical users. Our designed interface demonstrates
the levels of transparency that can influence users’
perceptions of system safety and readability.
It is important to note that the architecture pro-
vided by STRAUSS allows for the exploration of spe-
cific scenarios related to interface functionalities, pri-
oritizing aspects such as safety, security, and decision-
making. In other words, our architecture provides
a framework for exploring User Experience (UX)
ICEIS 2025 - 27th International Conference on Enterprise Information Systems
522

Figure 3: Scenario of use 2 - A journey with GPS attacker.
dimensions highlighted by potential users, such as
safety, reliability and predictability, as the end-user is
continuously informed trough the graphical interface.
Regarding user control, we anticipate that certain ac-
tions will be available for customizing routes. How-
ever, since safety is a primary concern, the system
evaluates whether any unplanned actions are risk-free
and conducts a permission protocol accordingly. We
also considered the facets of transparency and com-
munication style. As represented by the characteris-
tics of our personas, it is essential for the interface to
accommodate different user profiles, as this can sig-
nificantly impact users’ perceptions of safety. Fur-
thermore, we considered aspects of ease of use and
appearance (i.e., aesthetics). Although the personas
supported our design, users evaluations will be essen-
tial for assessing usability and hedonic aspects.
5 FINAL REMARKS
To improve the robustness and accuracy of STRAUSS
security, we incorporate machine learning techniques
to enhance detection and decision-making in the face
of random events, as one of the main causes of ve-
hicle problems is human error. Therefore, our archi-
tecture includes autonomous decision-making capa-
bilities, even in the face of random events. Another
differential of STRAUSS, compared to other architec-
tures in the literature, is the inclusion of a resilience
module, which is essential for maintaining the vehi-
cle’s operational stability even during successful op-
erations. In future works, we will implement the re-
(a) Dashboard updated to a wrong destination due to the
attack.
(b) Dashboard updated the direction and explains the de-
cision in three progressive levels as the user requests more
details.
Figure 4: High-fidelity mock-up for the scenario of use 2.
silient module and conduct boarding tests on a real
aircraft.
Additionally, this paper presents initial concepts
for the user interface design of air taxi systems. In our
prototype, we designed screens that focus on safety,
reliability, predictability, and ease of use, taking into
account different transparency levels based on user
profiles. Our next step is to conduct a deep literature
analysis on the design of the user interfaces for this
domain and to conduct user studies to gather the needs
and preferences of potential users, as well as insecuri-
ties, in managing different flight scenarios (e.g., hail-
ing, pick-up, travel, and drop-off). In this scenario,
trust is a key factor that will be assessed during user
evaluations. The results will be used to design initial
interface prototypes following an iterative process.
ACKNOWLEDGEMENTS
Scania Latin America funded this study — Project
Code 27192*54. It also received financial support
from CAPES (Coordination for the Improvement of
Higher Education Personnel — Brazil) — Funding
Code 001.
Jetson’s View: Designing Trustworthy Air Taxi Systems
523

REFERENCES
Chen, J., Feng, Z., Wen, J.-Y., Liu, B., and Sha, L. (2019).
A container-based dos attack-resilient control frame-
work for real-time uav systems. In 2019 Design, Au-
tomation & Test in Europe Conference & Exhibition
(DATE), pages 1222–1227. IEEE.
de Souza Filho, J. C., Belloum, R., and de Oliveira, K. M.
(2024). Where are we and where can we go on the
road to reliance-aware explainable user interfaces?
In 2024 IEEE Symposium on Visual Languages and
Human-Centric Computing (VL/HCC), pages 282–
288.
EASA, N. (2021). Study on the societal acceptance of urban
air mobility in europe.
Ferr
˜
ao, I., Da Silva, L., Bonilla, D., Dezan, C., Espes, D.,
and Castelo Branco, K. (2024a). Detecting spoofing
and gps jamming in uavs: Multiclass approach to at-
tack diagnosis.
Ferr
˜
ao, I. G., da Silva, L. M., da Silva, S. A., Dezan, C.,
Espes, D., and Branco, K. C. (2023). Intelligent diag-
nosis of engine failure in air vehicles using the alfa
dataset. In 2023 International Conference on Un-
manned Aircraft Systems (ICUAS), pages 871–878.
IEEE.
Ferr
˜
ao, I. G., da Silva, S. A., Pigatto, D. F., and Branco,
K. R. (2020a). Gps spoofing: Detecting gps fraud in
unmanned aerial vehicles. In 2020 Latin American
Robotics Symposium (LARS), 2020 Brazilian Sym-
posium on Robotics (SBR) and 2020 Workshop on
Robotics in Education (WRE), pages 1–6. IEEE.
Ferr
˜
ao, I. G., De Oliveira, A. L., Espes, D., Dezan, C., and
Branco, K. C. (2024b). Smart self-diagnosis method
for gps attacks and safety faults in uavs. In 2024 Inter-
national Conference on Unmanned Aircraft Systems
(ICUAS), pages 1301–1308. IEEE.
Ferr
˜
ao, I. G., Espes, D., Dezan, C., and Branco, K. R. L.
J. C. (2022a). Security and safety concerns in air taxis:
a systematic literature review. Sensors, 22(18):6875.
Ferr
˜
ao, I. G., Espes, D., Dezan, C., and Branco, K. R. L.
J. C. (2022b). Security and safety concerns in air taxis:
a systematic literature review. Sensors, 22(18):6875.
Ferr
˜
ao, I. G., Pigatto, D. F., Fontes, J. V., Silva, N. B., Es-
pes, D., Dezan, C., and Branco, K. R. (2020b). Stu-
art: Resilient architecture to dynamically manage un-
manned aerial vehicle networks under attack. In 2020
IEEE Symposium on Computers and Communications
(ISCC), pages 1–6. IEEE.
Hoff, K. A. and Bashir, M. (2015). Trust in automation: In-
tegrating empirical evidence on factors that influence
trust. Human factors, 57(3):407–434.
Hollnagel, E., Woods, D. D., and Leveson, N. (2006). Re-
silience engineering: Concepts and precepts. Ashgate
Publishing, Ltd.
Lotz, V., Kirste, A., Lidynia, C., Stumpf, E., and Ziefle,
M. (2023). User acceptance of urban air mobility
(uam) for passenger transport: A choice-based con-
joint study. In International Conference on Human-
Computer Interaction, pages 296–315. Springer.
Meurer, J., Pakusch, C., Stevens, G., Randall, D., and Wulf,
V. (2020). A wizard of oz study on passengers’ expe-
riences of a robo-taxi service in real-life settings. DIS
’20, New York, NY, USA. Association for Computing
Machinery.
Muralidhar, D., Belloum, R., de Oliveira, K. M., and
Ashok, A. (2023). Elements that influence trans-
parency in artificial intelligent systems - a survey. In
Abdelnour Nocera, J., Krist
´
ın L
´
arusd
´
ottir, M., Petrie,
H., Piccinno, A., and Winckler, M., editors, Human-
Computer Interaction – INTERACT 2023, pages 349–
358, Cham. Springer Nature Switzerland.
Nations, U. (2018). 2018 revision of world urbanization
prospects.
Nielsen, L. (2019). Personas - User Focused Design. Pub-
lishing Company, Incorporated.
OMG (2017). Unified modeling language.
Pigatto, D. F. (2017). Hamster healthy, mobility and
security-based data communication architecture for
unmanned systems. PhD thesis, Universidade de S
˜
ao
Paulo.
Ranscombe, C., Rodda, J., and Johnson, M. (2019). Vi-
sualising user experiences: Analysing embodiment of
ux in autonomous vehicle concepts. Proceedings of
the Design Society: International Conference on En-
gineering Design.
Sauer, V., Mertens, A., Heitland, J., and Nitsch, V. (2021).
Designing for trust and well-being: Identifying design
features of highly automated vehicles. In Extended
Abstracts of the 2021 CHI Conference on Human Fac-
tors in Computing Systems, CHI EA ’21, New York,
NY, USA. Association for Computing Machinery.
Siewert, S., Sampigethaya, K., Buchholz, J., and Rizor, S.
(2019). Fail-safe, fail-secure experiments for small
uas and uam traffic in urban airspace. In 2019
IEEE/AIAA 38th Digital Avionics Systems Conference
(DASC), pages 1–7. IEEE.
Springer, A. and Whittaker, S. (2019). Progressive disclo-
sure: Empirically motivated approaches to designing
effective transparency. In Proceedings of the 24th In-
ternational Conference on Intelligent User Interfaces
(IUI ’19), pages 107–120, New York, NY, USA. As-
sociation for Computing Machinery.
Str
¨
omberg, H., Pettersson, I., Nolhage, J., Ju, W., and
Martelaro, N. (2017). Setting the stage with
metaphors for interaction – researching methodolog-
ical approaches for interaction design of autonomous
vehicles. In Proceedings of the 2017 ACM Conference
Companion Publication on Designing Interactive Sys-
tems, DIS ’17 Companion, page 372–375, New York,
NY, USA. Association for Computing Machinery.
Verma, H., Ev
´
equoz, F., Pythoud, G., Eden, G., and
Lalanne, D. (2019). Engaging pedestrians in design-
ing interactions with autonomous vehicles. CHI EA
’19, page 1–6, New York, NY, USA. Association for
Computing Machinery.
Wiegers, K. and Beatty, J. (2013). Risk reduction through
prototyping, pages 295–311. Microsoft Press, Red-
mond, USA, 3 edition.
ICEIS 2025 - 27th International Conference on Enterprise Information Systems
524
