
Bridging the Semantic Gap in vGOAL for Verifiable Autonomous
Decision-Making
Yi Yang
a
and Tom Holvoet
b
Imec-DistriNet, KU Leuven, 3001 Leuven, Belgium
Keywords:
vGOAL, Semantic Gap, Interpreter, Model Checking, Autonomous Decision-Making.
Abstract:
Verifiable autonomous decision-making requires bridging the semantic gap between the execution semantics
of an agent programming language (APL) and the formal model used for verification. In this paper, we address
this challenge for vGOAL, an APL derived from GOAL and designed for automated verification. We make
three contributions. First, we identify the semantic gap in vGOAL: while both its interpreter and its model-
checking framework implement the semantics of vGOAL, they differ in how they define the next program state
for vGOAL. Second, we bridge the semantic gap by developing an improved interpreter for vGOAL that aligns
with the model checker’s formal semantics, thus ensuring correct verification results. Third, we introduce a
stepwise refinement approach to address potential efficiency concerns arising from this semantic alignment.
Through a case study in autonomous logistics, we demonstrate that while our approach introduces additional
verification overhead, the efficient model-checking framework of vGOAL keeps this overhead manageable,
making our solution practical for real-world applications.
1 INTRODUCTION
Verifiable autonomous decision-making requires
bridging the semantic gap between the execution se-
mantics of agent programming languages (APLs) and
their formal models used for verification. This chal-
lenge is particularly evident in the relationship be-
tween APL interpreters, which execute programs, and
their associated model-checking frameworks, which
verify program properties.
Model-checking frameworks for APLs can be
broadly categorized into two types. The first type
is interpreter-based model-checking frameworks, e.g.,
the interpreter-based model checker (IMC) for GOAL
(Hindriks, 2009), (Jongmans et al., 2010), (Jong-
mans, 2010). The second type is non-interpreter-
based model-checking frameworks, e.g., the model-
checking framework for AgentSpeak (Bordini and
H
¨
ubner, 2005), (Bordini et al., 2003). When model-
checking frameworks are developed upon the same
interpreter as the running program, this approach es-
tablishes a solid foundation for semantic equivalence,
as both operate under the same operational seman-
tics. In this paper, we focus on vGOAL, an APL
a
https://orcid.org/0000-0001-9565-1559
b
https://orcid.org/0000-0003-1304-3467
derived from GOAL with a specific emphasis on
automated verification (Yang and Holvoet, 2023a).
vGOAL is particularly advantageous due to its effi-
cient model-checking framework, which is capable
of validating complex autonomous systems involving
multiple agents. For vGOAL, both its interpreter and
its model-checking framework implement its opera-
tional semantics (Yang and Holvoet, 2023c), (Yang
and Holvoet, 2024). However, they differ in their ap-
proach to defining the next program state for vGOAL,
posing challenges for achieving a correct model for
sound model-checking analyses.
To address this challenge, we make three main
contributions. First, we identify and analyze the se-
mantic gap between the vGOAL interpreter and its
model-checking framework, providing a clear under-
standing of the discrepancies in their definitions of the
next program state. Second, we develop an improved
interpreter for vGOAL that aligns with the formal se-
mantics of the model-checking framework, ensuring
semantic consistency and correct verification results.
Third, we introduce a stepwise refinement approach
to address potential efficiency concerns arising from
this semantic alignment. This approach mitigates the
computational overhead introduced by the improved
interpreter, ensuring that the solution remains practi-
cal for real-world applications.
580
Yang, Y. and Holvoet, T.
Bridging the Semantic Gap in vGOAL for Verifiable Autonomous Decision-Making.
DOI: 10.5220/0013262400003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 580-587
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

Our approach effectively bridges the semantic gap
in vGOAL while maintaining manageable computa-
tional costs, thanks to the efficiency of its model-
checking framework. We demonstrate the practical-
ity and effectiveness of our solution through a case
study in autonomous logistics, involving three au-
tonomous robots. This case study highlights how our
approach enables reliable verification without com-
promising system performance.
The remainder of this paper is organized as fol-
lows: Section 2 discusses related work. Section 3
provides the preliminaries for vGOAL. Section 4 de-
tails the semantic gap problem in vGOAL. Section 5
presents our approach to bridging the semantic gap
in vGOAL through an improved interpreter and dis-
cusses how stepwise refinement address potential per-
formance overhead. Section 6 describes how to ap-
ply the stepwise refinement to a vGOAL program to
improve the overall system efficiency through an au-
tonomous logistic system. Finally, Section 7 con-
cludes our paper.
2 RELATED WORK
Model checking is widely used in verifying both
robotic systems and agent programs (Luckcuck et al.,
2019). This section reviews key model-checking ap-
proaches for APLs, focusing on the semantic gap be-
tween program execution and verification.
Interpreter-based approaches use the APL inter-
preter directly in the model generation process, po-
tentially offering better semantic alignment between
program execution and the generated model for model
checking. The MCAPL (Model-checking Agent Pro-
gramming Languages) framework (Dennis, 2018)
represents a significant advancement in this direc-
tion, supporting various APLs including Gwendolen,
GOAL, SAAPL (Winikoff, 2007), ORWELL (Das-
tani et al., 2009), AgentSpeak, and 3APL (Hindriks
et al., 1999). While MCAPL ensures close seman-
tic alignment through its Agent Infrastructure Layer
(AIL), it faces efficiency challenges (Dennis et al.,
2012). Attempts to address these limitations through
translation to more efficient model checkers like SPIN
(Holzmann, 1997) and PRISM (Kwiatkowska et al.,
2011) (Dennis et al., 2018) have shown promise
but introduce new semantic gap concerns during the
translation process.
The interpreter-based model checker (IMC) for
GOAL (Jongmans et al., 2010), (Jongmans, 2010)
takes a similar approach, using the program inter-
preter directly for state space generation. While this
ensures semantic consistency, its limited state-space
reduction capabilities and restriction to single-agent
systems constrain its practical application.
These approaches typically translate agent pro-
grams into established model-checking languages.
Early work with AgentSpeak (Bordini et al., 2003)
used Promela for verification with SPIN, introduc-
ing semantic gaps through translation. Recent work
(Yang and Holvoet, 2023b) demonstrates automated
model checking for GOAL programs without inter-
preter dependency, though limited to single-agent sys-
tems.
Both approaches face challenges in bridging the
semantic gap between program execution and model
checking in APLs, with interpreter-based approaches
generally offering better semantic alignment.
3 PRELIMINARIES: vGOAL
This section provides preliminaries to understand
the semantic gap in vGOAL. We provide a concise
overview of a vGOAL program, its operational se-
mantics, and the shared implementation of its in-
terpreter and its model-checking framework. For
more details in vGOAL, its interpreter, and its model-
checking framework, please refer to (Yang and
Holvoet, 2023a), (Yang and Holvoet, 2023c), and
(Yang and Holvoet, 2024), respectively.
Definition 1. (vGOAL Program)
A vGOAL program is defined as:
P ::=(MAS, RuleSets, E f f ects, Domain, Analyses),
MAS ::=Agent
∗
,
Agent ::=(id, belie f s, goals, Msgs),
Msgs ::=sentMsgs, receivedMsgs,
RuleSets ::=Knowledge, Constraints, Actions, Sent, Events,
Analyses ::=Sa f ety, Errors, FatalMsgs.
A vGOAL program consists of the specifica-
tion of the multi-agent system (MAS), five rule sets
(RuleSets), the effects of actions (E f f ects), vari-
able domains (Domain), and analyzed properties
(Analyses). The syntax of vGOAL is based on first-
order logic, with terms, predicates, and quantifiers.
It imposes three key restrictions: finite domains for
all variables, all variables must be quantified, and no
negative recursion within each rule. These ensure a
minimal model for each rule set.
Definition 2. (Interpretation) The interpretation of
beliefs and goals is defined as follows:
belie f s ::= [b
1
, ..., b
m
]
I(belie f s) ::= {b
1
, ..., b
m
}
goals ::= [[g
11
, ..., g
1k
], ..., [g
n
]]
I(goals) ::= {a-goal-g
11
, ..., a-goal-g
1k
}
Bridging the Semantic Gap in vGOAL for Verifiable Autonomous Decision-Making
581

The interpretation of beliefs is a set of atoms. No-
tably, the interpretation of goals only pertains to the
first goal of the agent. a-goal indicates the desired be-
liefs. The interpretation of goals is the key to merging
state space of vGOAL programs, especially for multi-
ple goals.
Definition 3. (vGOAL States) A vGOAL state is de-
fined as:
state ::= {subS
1
, . . . , subS
n
},
subS
i
::= id
i
: (I(belie f s
i
), I(goals
i
)),
where id
1
, . . . , id
n
are unique identifiers for each sub-
state.
A vGOAL state is composed of multiple substates.
Each substate represents an agent, identified by a
unique identifier, along with the interpretation of its
beliefs and goals.
Definition 4. (Operational Semantics of vGOAL) The
operational semantics of vGOAL are defined by the
transition:
state
Act
−−→ state
′
,
where:
• state, state
′
::= subS
1
, . . . , subS
n
, with n ≥ 1
• subS
i
::= {i : (I(belie f s
i
), I(goals
i
))}, for i ∈
{1, . . . , n}
• Act ::= events, actions
• events ::= {id
1
: event
1
, . . . , id
n
: event
n
}, with n ≥
1
• actions ::= {id
1
: action
1
, . . . , id
n
: action
n
}, with
n ≥ 1
• id
i
are unique identifiers for each involved agent
The operational semantics describe how each state
transition is influenced by actions and events, which
are specific to each agent.
For vGOAL, the implementations of its interpreter
and its model-checking framework share the same im-
plementation of the substate updates outlined in Al-
gorithm 1. This algorithm implements all possible
state transitions: subS
i
id
i
:action
i
,id
i
:event
i
,
−−−−−−−−−−−→ subS
′
i
, where
substates evolve through two mechanisms: actions
that modify agent beliefs, and events that can af-
fect both beliefs and goals. This shared implemen-
tation is fundamental to ensure semantic consistency
between program execution and the model checked
by the model-checking framework, which we will ex-
plore in detail in the following sections.
4 SEMANTIC GAP
In this section, we analyze the fundamental difference
between program executions in the vGOAL interpreter
Algorithm 1: Substate Update.
1 Function Expansion(state, P):
2 foreach subS
i
∈ state do
3 actions
i
, events
i
← Reason(subS
i
, P)
4 subtrans
i
←
/
0
5 foreach action
i
∈ actions
i
do
6 subS
′
i
←
U pdate(subS
i
, events
i
, action
i
)
7 subT ←
(subS, events
i
, ation
i
, subS
′
i
)
8 subtrans
i
← subtrans
i
∪ {subT }
9 Communicate among all agents
10 subtransitions ←
S
n
1
{(id
i
: subtrans
i
)}
11 actions ←
S
n
1
{(id
i
: actions
i
)}
12 return subtransitions, actions
and its model-checking framework, illustrating this
difference through a representative scenario.
Both implementations follow the same formal
transition rule: state
Act
−−→ state
′
. However, the model-
checking framework waits for all agents to complete
their actions before generating the next program state,
while the interpreter updates the state as soon as one
agent completes its action. This difference leads to
distinct execution behaviors in practice. The inter-
preter’s approach allows for more dynamic and re-
sponsive interactions with the environment, as it can
adapt to changes as soon as they occur. In contrast,
the model-checking framework considers all possi-
ble outcomes before transitioning to the next program
state. These differences illustrate the trade-offs be-
tween real-time adaptability and exhaustive state ex-
ploration in multi-agent systems.
Algorithm 2 describes the stepwise execution of
the vGOAL interpreter. It processes one state at a time
and interacts with actual agents in the environment. It
begins with a vGOAL program and real-time agent be-
lief information as inputs. The execution starts with
the initial state (s
0
), based on agents’ initial beliefs
and goals. and sets the current state s and execu-
tion trace E to s
0
. It then enters a loop that continues
while any agent has remaining goals. The interpreter
iteratively evaluates each agent’s state to determine
possible actions, allowing at most one action per sub-
state. It identifies potential next substates by consid-
ering action outcomes and sends commands to agents
with actions to perform. During the waiting phase, the
interpreter updates each agent’s substate using real-
time information. The waiting phase ends as soon as
one substate completes its action, after which the new
state is set and the reasoning cycle begins again. This
cycle continues until all agents have achieved their
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
582
Algorithm 2: Operational Semantics Implementa-
tion in the vGOAL Interpreter.
Input: a vGOAL program: P, real-time agent
information: In f o
Output: a program execution
s
0
, (events
1
, actions
1
), s
1
, . . . , s
n
// Initialization
1 s
0
← {id
i
: (I(belie f s
i
), I(goals
i
)) | i ∈
{1, . . . , n}}
2 s ← s
0
, E ← s
0
// Continue until no gaols
3 while ∃i.I(goals
i
) ̸=
/
0 do
4 subtrans, actions ← Expansion(s,P)
5 foreach (id
i
: actions
i
) ∈ actions do
6 Send to Agent
i
: perform action
i
.
7 wait ← True, s ←
/
0, t ←
/
0
8 while wait do
9 foreach subS
i
∈ s do
10 subS
′
i
← In f o
11 subT ← (subS
i
, , action
i
, subS
′
i
)
12 t ← t ∪{subT } s ← s
′
∪ {subS
′
i
}
13 foreach subT ∈ t do
14 if subT ∈ subtrans
i
then
15 wait ← False,
16 events ← events ∪ {id : event
i
}
17 actions ← actions ∪ {id :
action
i
}
18 E ← E, (events, actions), s
19 return E
goals.
Algorithm 3 outlines the process of generating a
transition system from a vGOAL program. The algo-
rithm iteratively explores each state, generating possi-
ble transitions and updating the set of states and tran-
sitions accordingly. It captures the non-deterministic
outcomes of agent actions by calculating all possi-
ble transitions from the current state, considering the
Cartesian product of subtransitions for each agent.
The loop continues until no new states are generated,
at which point the algorithm terminates and returns
the constructed transition system.
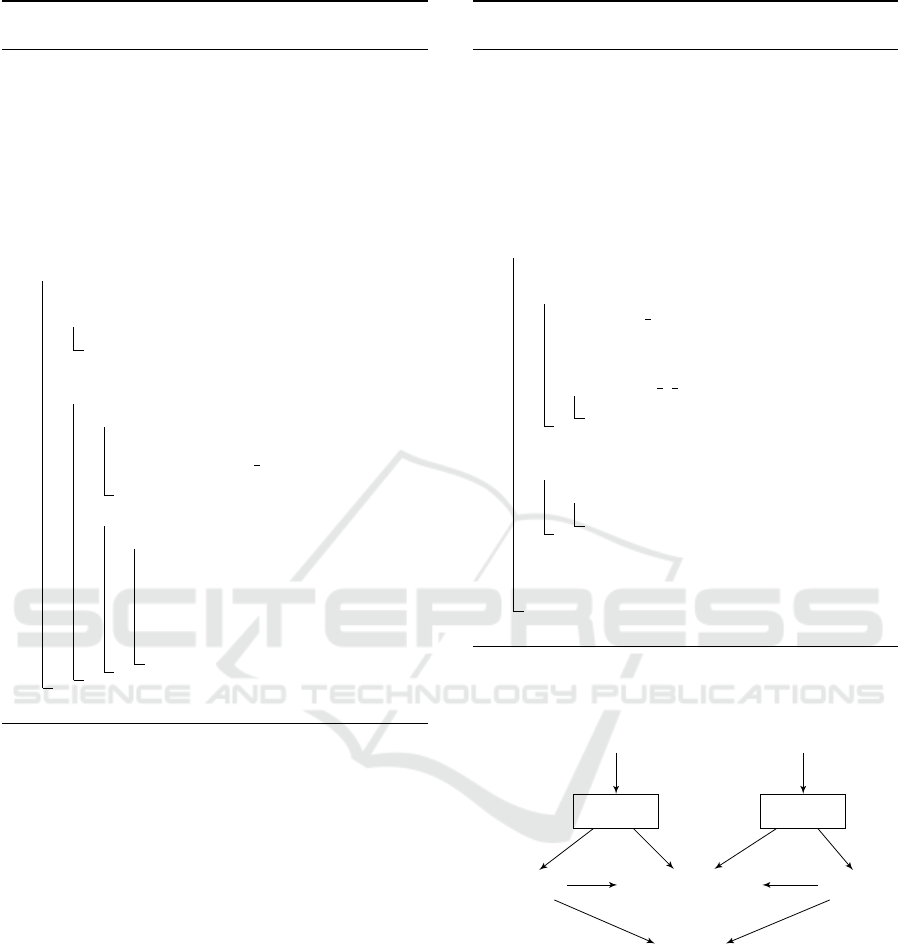
To illustrate the semantic gap in vGOAL, we
present a representative multi-agent scenario de-
picted in Figure 1. The scenario involves two
robots (Robot
1
and Robot
2
) navigating through in-
termediate locations to reach a common destination
(Location
5
). Robot
1
starts from Location
1
and moves
via Location
2
, while Robot
2
begins at Location
3
and
travels via Location
4
. Access to locations is granted
on a first-come-first-served basis, with Robot
1
having
Algorithm 3: Operational Semantics Implementa-
tion in the vGOAL Model-Checking Framework.
Input: a vGOAL program: P
Output: a transition system: (S, T, s
0
, F)
// Initialization
1 s
0
← {id
i
: (I(belie f s
i
), I(goals
i
)) | i ∈
{1, . . . , n}}
2 S ← {s
0
}, F ←
/
0, T ←
/
0
// Iterative state exploration
3 S
cur
← {s
0
}
4 while S
cur
̸=
/
0 do
5 S
next
←
/
0
6 foreach s ∈ S
cur
do
7 subtrans, , ← Expansion(s, P)
8 transitions ←
∏
n
i=1
subtrans
i
,
T ← T ∪transitions
9 foreach (s, , , s
′
) ∈ transitions do
10 S
next
← S
next
∪ {s
′
}
// Terminal state identification
11 foreach s ∈ S
next
do
12 if ∀i.I(goals
i
) =
/
0 then
13 F ← F ∪{s}
// State updates
14 S ← S ∪ S
next
, S
next
← S
next
\ F,
S
cur
← S
next
15 return (S, T, s
0
, F)
priority in simultaneous requests.
Robot
1
Robot
2
Location
1
Location
2
Wrong Location
Location
3
Location
4
Location
5
Initial
Initial
Success
Failure
Success
Success
Failure
Success
Failure
Figure 1: A Multi-Agent Scenario.
This scenario illustrates a fundamental difference
between the interpreter and model-checking imple-
mentations. Initially, both implementations generate
identical decisions, directing the robots toward their
respective intermediate locations. However, their be-
haviors diverge in subsequent state transitions. The
interpreter processes state changes asynchronously,
updating the program state whenever either robot
completes its movement. Consequently, the robot that
reaches its intermediate location first gains access to
Bridging the Semantic Gap in vGOAL for Verifiable Autonomous Decision-Making
583

Location
5
. In contrast, the model-checking frame-
work processes state changes synchronously, waiting
for both robots to complete their movements before
transitioning to the next state. Under this implementa-
tion, Robot
1
consistently secures access to Location
5
due to its priority status.
5 BRIDGING SEMANTIC GAP
This section presents our approach to bridging the se-
mantic gap in vGOAL. As discussed in Section 4, the
vGOAL interpreter and model-checking framework
differ in how they define the next program state. The
interpreter updates the state as soon as one agent com-
pletes its action, while the model-checking frame-
work waits for all agents to complete their actions. To
address this gap, we propose two general approaches.
The first approach involves aligning both the
vGOAL interpreter and the model-checking frame-
work with the interpreter’s definition of the next pro-
gram state, where decisions are made as soon as any
agent completes its action. This approach allows for
more dynamic and responsive system behavior but ex-
ponentially increases the state space, thus worsening
the state-space explosion problem in model checking.
The second approach aligns both components with
the model-checking framework’s definition, where
decisions are made only after all agents complete their
actions. Although this approach introduces potential
efficiency concerns due to increased waiting times, it
maintains a manageable state space and ensures con-
sistency between the interpreter and model-checking
framework.
Given that system efficiency can be improved
through various software engineering techniques, we
adopt the second approach and employ stepwise re-
finement of the original vGOAL program to mitigate
the efficiency concerns. Our solution involves two se-
quential steps: (1) improving the vGOAL interpreter
to ensure that autonomous decision-making occurs
only after all agents have completed their current ac-
tions, and (2) applying stepwise refinement to the
original vGOAL program to mitigate the increased ex-
ecution time.
Algorithm 4 outlines the implementation of the
operational semantics in the improved vGOAL inter-
preter. Compared with Algorithm 2, Algorithm 4 only
revised the condition to generate the next decision for
the autonomous system. Specifically, a new variable
terminate is introduced in Algorithm 4 (see Line 13),
which evaluates whether all agents complete their ac-
tions. This imposed restriction makes the implemen-
tation of the operational semantics in the vGOAL in-
Algorithm 4: Operational Semantics Imple-
mentation in the Improved vGOAL Interpreter.
Input: a vGOAL program: P, real-time agent
information: In f o
Output: a program execution
s
0
, (events
1
, actions
1
), s
1
, . . . , s
n
// Initialization
1 s
0
← {id
i
: (I(belie f s
i
), I(goals
i
)) | i ∈
{1, . . . , n}}
2 s ← s
0
, E ← s
0
// Continue until no gaols
3 while ∃i.I(goals
i
) ̸=
/
0 do
4 subtrans, actions ← Expansion(s,P)
5 foreach (id
i
: actions
i
) ∈ actions do
6 Send to Agent
i
: perform action
i
.
7 wait ← True, s ←
/
0, t ←
/
0
8 while wait do
9 foreach subS
i
∈ s do
10 subS
′
i
← In f o
11 subT ← (subS
i
, , action
i
, subS
′
i
)
12 t ← t ∪{subT } s ← s
′
∪ {subS
′
i
}
13 terminate ← True
14 foreach subT ∈ t do
15 if subT ∈ subtrans
i
then
16 events ← events ∪ {id : event
i
}
17 actions ← actions ∪ {id :
action
i
}
18 E ← E, (events, actions), s
19 else
20 terminate ← False,
21 wait ← ¬terminate
22 return E
terpreter align with the implementation of the oper-
ational semantics in the model-checking framework
for vGOAL.
We acknowledge that the improved vGOAL inter-
preter may result in a long waiting time for some
agents when each agent needs a different time to com-
plete its action, which increases the overall execution
time for the whole autonomous system.
However, we point out that this efficiency issue
can be properly addressed if we introduce the step-
wise refinement to the vGOAL program. Specifically,
we can refine actions that may take a long time into
multiple actions that take a shorter time, thus making
the waiting time shorter, thereby improving the sys-
tem efficiency. For example, consider a robot’s move-
ment action from location A to location D, which
takes a long time to complete. Instead of having a
single ”move to location D” action, we can refine it
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
584
into multiple shorter actions that traverse through in-
termediate locations: ”move from A to B”, ”move B
to C”, and ”move C to D”. This way, other agents
can continue their tasks after each intermediate move-
ment is completed, rather than waiting for the entire
from A to D movement to finish. This refinement sig-
nificantly reduces overall waiting time and improves
system efficiency.
While stepwise refinement may increase the state
space, we hypothesize that this growth can be con-
trolled to remain linear rather than exponential. This
hypothesis is based on the observation that the addi-
tional states represent intermediate steps of existing
actions rather than entirely new behavioral branches.
Furthermore, the verification of properties, including
safety and liveness, remains unchanged despite the re-
finement of actions. Future experiments will be con-
ducted to validate this hypothesis and quantify the im-
pact of stepwise refinement on state-space growth.
6 CASE STUDY
This section presents a case study to illustrate how
stepwise refinement addresses efficiency issues intro-
duced by the improved vGOAL interpreter. The case
study involves three autonomous robots operating in
a logistic system. We conduct a comparative analy-
sis to demonstrate the impact of stepwise refinement
on system efficiency and empirically evaluate the time
costs for model checking. All experiments were con-
ducted on a MacBook Air 2020 with an Apple M1 and
16GB of RAM. The complete vGOAL specifications
are available at (Yang, 2024).
The autonomous logistic system is expected to de-
liver three workpieces from one of the two pick sta-
tions to the delivery destination. The autonomous
logistic system consists of three autonomous robots:
Robot
1
, Robot
2
, and Robot
3
. Each robot can perform
four actions: move, pick, drop, and charge. Uncer-
tainty happens in the execution of actions, i.e., each
action can either succeed or fail, leading to a desired
state or the system crash.
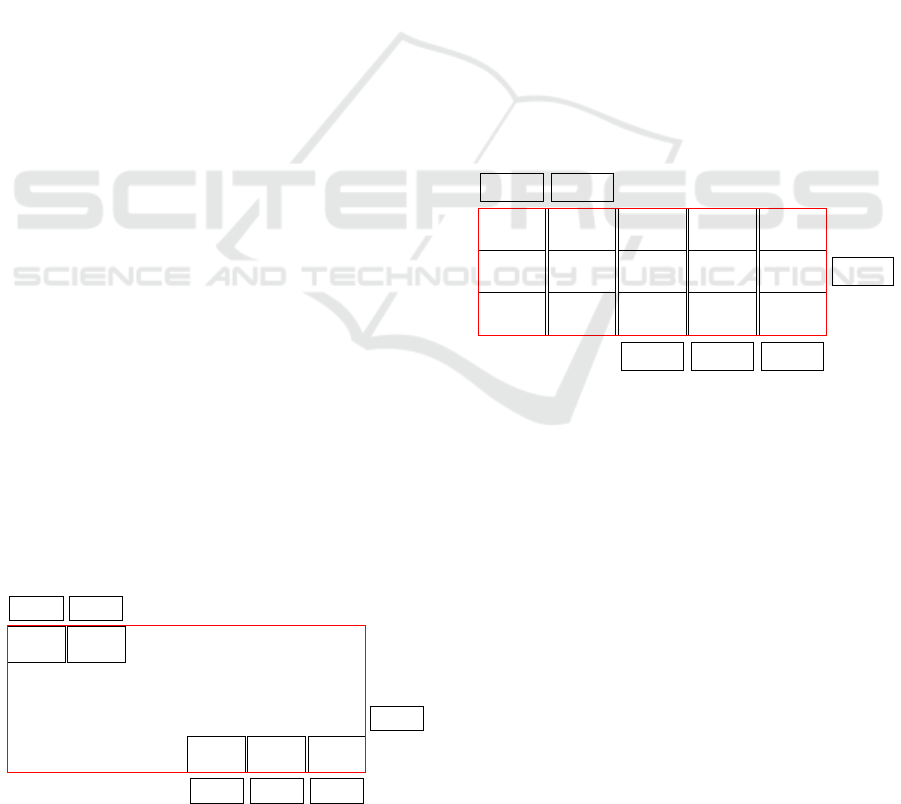
Destination
Pick
1
Location
0
Location
1
Location
3
Location
4
Location
5
Charge
1
Charge
2
Charge
3
Pick
2
Location
6
Figure 2: Environment before Refinement.
Now, we introduce the environment where the au-
tonomous system operates before the stepwise refine-
ment. Figure 2 presents the layout of the divided
into eight areas, from Location
0
to Location
7
. Eight
areas include one delivery destination (Location
0
);
two pick stations (Location
1
, Location
2
); three charg-
ing stations (Location
3
, Location
4
, Location
5
); and
the rest area (Location
6
). Initially, Robot
1
locates at
Location
3
; Robot
2
locates at Location
4
; and Robot
4
locates at Location
5
. Additionally, a maximum of one
robot can stand on the locations from Location
0
to
Location
6
.
In this autonomous logistic system, each robot can
only perform four actions. The execution time to per-
form move can vary a lot and this action needs loca-
tion permission, while the execution time to perform
the other three actions (pick, drop, and charge) are
relatively stable, and do not require any critical re-
sources. Hence, move is the key to affecting the over-
all execution time for this autonomous system. For
example, the vGOAL interpreter initially makes a de-
cision for Robot
1
and Robot
2
: move to Location
1
, and
move to Location
2
, respectively. Robot
3
has to wait to
get the location permission for Location
1
until both
Robot
1
and Robot
2
achieve their goals.
Destination
Pick
1
Location
0
Location
1
Location
11
Location
13
Location
14
Location
7
Location
9
Location
10
Location
12
Location
2
Location
6
Location
8
Location
3
Location
4
Location
5
Charge
1
Charge
2
Charge
3
Pick
2
Figure 3: Environment after Refinement.
To address the inefficiency, we refined the envi-
ronment to 15 areas as shown in Figure 3. Specif-
ically, we keep the original six locations from
Location
0
to Location
5
, and we refine one original
location (Location
6
) to the current nine areas (from
Location
6
to Location
14
. In the refined environment,
each execution time for the move action will be rel-
atively stable, and robots do not have to wait to get
the move command until other robots complete a long
journey.
We illustrate the efficiency improvement between
before and after the refinement. First, we use the
improved vGOAL interpreter outlined in Algorithm
4 and the model-checking framework for vGOAL.
The vGOAL program describes how the autonomous
logistic system works in the environment as shown
in Figure 2. Second, we use the improved vGOAL
interpreter outlined in Algorithm 4 and the model-
Bridging the Semantic Gap in vGOAL for Verifiable Autonomous Decision-Making
585
checking framework for vGOAL. The vGOAL pro-
gram describes how the autonomous logistic system
works in the refined environment as shown in Figure
3.
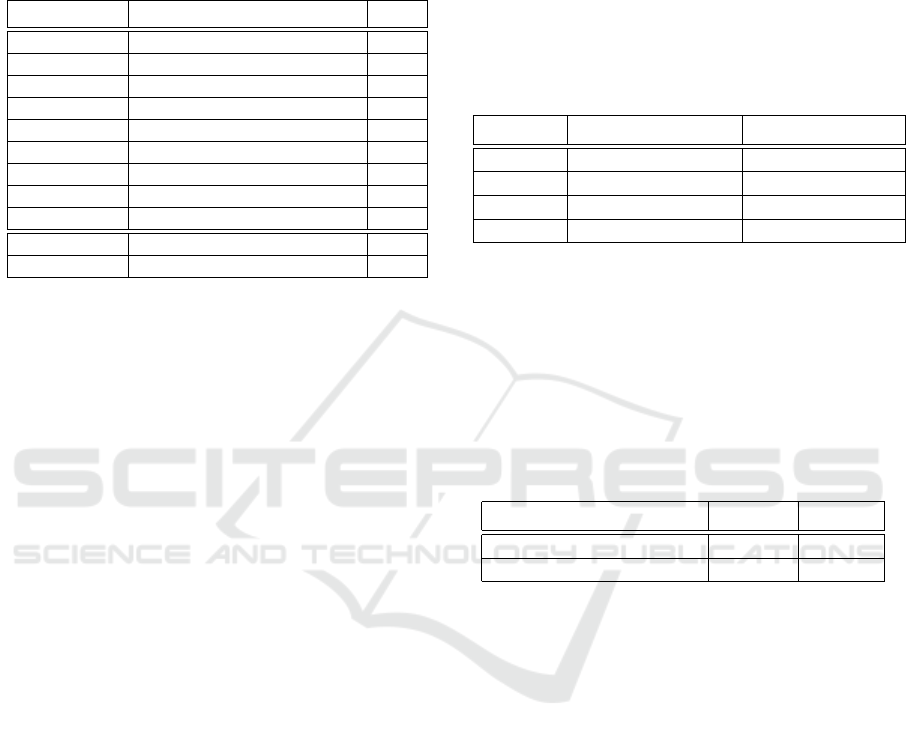
Table 1: Stepwise Refinement in vGOAL Program.
Original Path Refined Path Time
3 → 1 3 → 8 → 9 → 1 3t
1
4 → 1 4 → 8 → 9 → 1 3t
1
5 → 1 5 → 8 → 9 → 1 3t
1
3 → 2 3 → 10 → 12 → 2 3t
1
4 → 2 4 → 12 → 2 2t
1
2 → 0 2 → 14 → 13 → 11 → 1 → 0 5t
1
0 → 3 0 → 7 → 6 → 8 → 3 4t
1
0 → 4 0 → 7 → 6 → 8 → 4 4t
1
0 → 5 0 → 7 → 6 → 8 → 5 4t
1
1 → 0 1 → 0 t
1
5 → 2 5 → 2 t
1
Table 1 illustrates the refinement of movement
paths in our case study. Among the four possi-
ble robot actions, the move action exhibits signifi-
cant variability in execution time, quantified using
t
1
. This variability is primarily influenced by the dis-
tance a robot must travel, leading to substantial wait-
ing times for other robots and reducing overall system
efficiency.
In our analysis, robots can traverse 11 different
paths to achieve their delivery objectives. We iden-
tified nine paths that need to be refined, each requir-
ing multiple t
1
units for a move action, while only
two paths were efficient, taking approximately t
1
. To
optimize the system, we concentrated our refinement
efforts on these nine longer paths. Our approach in-
volved breaking down each long path into shorter seg-
ments, ensuring that each move action would take ap-
proximately t
1
to complete. This refinement approach
reduces robot waiting times and improves overall sys-
tem performance.
The total system execution time is calculated as
the sum of sequential action steps, where multiple
robots can operate simultaneously in each step. For
example, when all three robots perform a charging
action concurrently, the execution time for this step
is simply t
2
. Similarly, when Robot
1
moves from
Location
3
to Location
1
(taking 3t
1
) while Robot
2
moves from Location
4
to Location
2
(taking 2t
1
), and
Robot
3
remains idle, the execution time for this step
is max(3t
1
, 2t
1
, 0) = 3t
1
. This calculation method en-
sures an accurate representation of both sequential
and parallel robot operations.
We ran both the original and refined vGOAL pro-
grams within a model-checking framework, generat-
ing the same longest execution that can be produced
by the vGOAL interpreter. Table 2 shows the details
of the execution time before and after refinement. The
execution time before refinement includes 26t
1
for
seven unrefined move actions, t
2
for one charge ac-
tion, 2t
3
for two pick actions, and 3t
4
for three drop
actions. The execution time after refinement includes
17t
1
for 17 refined move actions, t
2
for one charge ac-
tion, 2t
3
for two pick actions, and 2t
4
for two drop
actions.
Table 2: Execution Time before and after the Refinement.
Duration Before Refinement After Refinement
move 26t
1
17t
1
charge t
2
t
2
pick 2t
3
2t
3
drop 3t
4
2t
4
The refinement of the vGOAL program signifi-
cantly improved the efficiency of robot actions, par-
ticularly in reducing the time spent on move actions.
By breaking down longer paths into shorter segments,
we achieved a reduction in the total execution time
from 26t
1
to 17t
1
for move actions. This refinement
of move minimizes waiting times for other robots and
improves the overall system performance.
Table 3: Model-Checking Before and After Refinement.
Indicators Original Refined
Number of States 1186 2635
Model-checking Time (s) 40.88 218.84
We recognize that the refinement process leads to
an expansion of the state space, which in turn in-
creases the time required for model-checking. Table 3
illustrates the model-checking results both before and
after the refinement. In this case study, we focused
on verifying the safety and liveness properties. As
expected, the state space approximately doubled, re-
sulting in an increase of about 160 seconds in model-
checking time. Despite this increase, the additional
time remains manageable and within acceptable lim-
its. Despite this increase in computational overhead,
we consider this trade-off acceptable for several rea-
sons. First, the model-checking time remains within
practical limits, adding only about three minutes to
the verification process. Second, this one-time verifi-
cation cost is outweighed by the long-term benefits of
improved runtime efficiency in the actual robot sys-
tem.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
586

7 CONCLUSION AND FUTURE
WORK
This paper addresses a critical challenge in verifiable
autonomous decision-making: bridging the semantic
gap between program execution and model check-
ing in vGOAL. We have made three key contribu-
tions: (1) identifying and analyzing the semantic gap
in vGOAL, (2) developing an improved interpreter that
aligns the implementation of the next program state,
and (3) demonstrating how stepwise refinement can
effectively address potential efficiency issues.
Our case study of an autonomous logistics sys-
tem with three mobile robots validates our approach.
The results show that while our improved interpreter
may introduce some execution overhead, the step-
wise refinement successfully reduces the execution
time for move actions by 34.6%. Although the re-
finement process increased the state space and model-
checking time, the additional computational cost re-
mained manageable, demonstrating the practicality of
our approach.
Future work will focus on two directions: (1)
extending experimental validation across a broader
range of multi-agent scenarios and real-world envi-
ronments, and (2) conducting comprehensive scal-
ability analysis with increasing system complexity.
These extensions will further validate and enhance
our approach to developing reliable autonomous
decision-making systems.
ACKNOWLEDGEMENTS
This research is partially funded by the Research
Fund KU Leuven.
REFERENCES
Bordini, R. H., Fisher, M., Pardavila, C., and Wooldridge,
M. (2003). Model checking AgentSpeak. In Pro-
ceedings of the second international joint conference
on Autonomous agents and multiagent systems, pages
409–416.
Bordini, R. H. and H
¨
ubner, J. F. (2005). BDI agent program-
ming in AgentSpeak using Jason. In International
workshop on computational logic in multi-agent sys-
tems, pages 143–164. Springer.
Dastani, M., Tinnemeier, N. A., and Meyer, J.-J. C. (2009).
A programming language for normative multi-agent
systems. In Handbook of Research on Multi-Agent
Systems: semantics and dynamics of organizational
models, pages 397–417. IGI Global.
Dennis, L. A. (2018). The mcapl framework including the
agent infrastructure layer and agent java pathfinder.
The Journal of Open Source Software.
Dennis, L. A., Fisher, M., and Webster, M. (2018). Two-
stage agent program verification. Journal of Logic and
Computation, 28(3):499–523.
Dennis, L. A., Fisher, M., Webster, M. P., and Bordini,
R. H. (2012). Model checking agent programming
languages. Automated software engineering, 19(1):5–
63.
Hindriks, K. V. (2009). Programming rational agents in
GOAL. In Multi-agent programming, pages 119–157.
Springer, Berlin, Heidelberg.
Hindriks, K. V., De Boer, F. S., Van der Hoek, W., and
Meyer, J.-J. C. (1999). Agent programming in 3apl.
Autonomous Agents and Multi-Agent Systems, 2:357–
401.
Holzmann, G. J. (1997). The model checker spin. IEEE
Transactions on software engineering, 23(5):279–
295.
Jongmans, S. (2010). Model checking GOAL agents.
Jongmans, S.-S. T., Hindriks, K. V., and Van Riemsdijk,
M. B. (2010). Model checking agent programs by us-
ing the program interpreter. In Computational Logic
in Multi-Agent Systems: 11th International Workshop,
CLIMA XI, Lisbon, Portugal, August 16-17, 2010.
Proceedings 11, pages 219–237. Springer.
Kwiatkowska, M., Norman, G., and Parker, D. (2011).
Prism 4.0: Verification of probabilistic real-time sys-
tems. In Computer Aided Verification: 23rd Interna-
tional Conference, CAV 2011, Snowbird, UT, USA,
July 14-20, 2011. Proceedings 23, pages 585–591.
Springer.
Luckcuck, M., Farrell, M., Dennis, L. A., Dixon, C., and
Fisher, M. (2019). Formal specification and verifica-
tion of autonomous robotic systems: A survey. ACM
Computing Surveys (CSUR), 52(5):1–41.
Winikoff, M. (2007). Implementing commitment-based in-
teractions. In Proceedings of the 6th international
joint conference on Autonomous agents and multia-
gent systems, pages 1–8.
Yang, Y. (2024). Supplementary Documents. https://github.
com/yiyangvGOAL/vGOALICAART2025.git.
Yang, Y. and Holvoet, T. (2023a). vGOAL: a GOAL-based
specification language for safe autonomous decision-
making. In Engineering Multi-Agent Systems: 11th
International Workshop, EMAS 2023, London, UK,
29-30 May 2023, Revised Selected Papers.
Yang, Y. and Holvoet, T. (2023b). Making model checking
feasible for goal. Annals of Mathematics and Artificial
Intelligence.
Yang, Y. and Holvoet, T. (2023c). Safe autonomous
decision-making with vGOAL. In Advances in
Practical Applications of Agents, Multi-Agent Sys-
tems, and Cognitive Mimetics. The PAAMS Collec-
tion. Guimar
˜
aes, Portugal.
Yang, Y. and Holvoet, T. (2024). Model Checking of
vGOAL. arXiv, Preprint. Preprint.
Bridging the Semantic Gap in vGOAL for Verifiable Autonomous Decision-Making
587
