
Beyond the Ragdoll: Designing a Safe-Falling Controller
for Physically Simulated Characters
Lovro Boban
a
and Mirko Su
ˇ
znjevi
´
c
b
University of Zagreb Faculty of Electrical Engineering and Computing, Zagreb, Croatia
Keywords:
Reinforcement Learning, Computer Animation, User Study.
Abstract:
In this paper we propose the design for a procedural, physically simulated animation system that produces
safe falling animations using reinforcement learning. A character controller is trained to minimize external
and internal forces on the humanoid character’s body after it is pushed backwards on a flat surface. We design
a questionnaire and conduct a user study that compares the reinforcement learning approach with a motion
capture approach using subjective ratings on various aspects of the character’s movement. Our findings, based
on a sample size of (n = 25), indicate that users prefer the motion capture approach on 6 out of 8 aspects, but
prefer the reinforcement learning approach on the aspect of reactivity.
1 INTRODUCTION
Character animation is an integral part of many video
games, and despite growing visual fidelity over the
years, one area of animation is still not very devel-
oped - interactive, procedural animation. While many
video games do use minor procedural elements in
their animations such as inverse kinematics for correct
foot placement on uneven surfaces and cloth simula-
tion for secondary motion, rarely do games use pro-
cedural animation for whole body motions. This can
result in static animations that do not meaningfully
adapt to the environment, thereby creating a discon-
nect between the player character and their environ-
ment, lowering immersion.
Procedural, physically simulated animations,
however, do show up with some regularity in many
video games in the form of ”ragdolls”. When a char-
acter trips and falls or is pushed, their body goes
limp and they fall to the ground, often without even
trying to protect themselves from injury during the
fall. While some games do have so-called ”active rag-
dolls” which curl up to protect themselves or try to re-
tain balance before falling over, this area of animation
is still underexplored.
In this paper we present the design of a procedural
safe falling animation system based on reinforcement
learning (RL) and we present the results of a study
a
https://orcid.org/0009-0003-4225-7146
b
https://orcid.org/0000-0003-0334-8179
that compares the system with a more traditional an-
imation system based on motion capture. Section 2
looks at other works that have contributed to the topic
of safe falling or producing animations using machine
learning. Section 3 describes the design of our anima-
tion system. Section 4 describes the design and the
results of the comparative user study, including a dis-
cussion of the results. Finally, section 6 summarizes
the results and talks about where future work might
be headed.
2 RELATED WORK
2.1 Safe Falling in Robotics
One discipline of engineering that is concerned with
the execution of safe falling strategies is robotics.
Aside from sensing the environment and navigating
through it, safe falling methods for robots are of great
interest to roboticists because an uncontrolled fall
could result in serious damages to the robot, its en-
vironment, or living beings around the robot.
(Rossini et al., 2019) developed a method to com-
pute the optimal falling trajectory for a robot to max-
imally reduce the velocity at points where it impacts
the ground by squatting and stretching as it falls. The
fall is modeled as a series of telescopic inverted pen-
dulums - the standing robot is modeled as a four-link
inverted pendulum, then as a three-link inverted pen-
Boban, L. and Sužnjevi
´
c, M.
Beyond the Ragdoll: Designing a Safe-Falling Controller for Physically Simulated Characters.
DOI: 10.5220/0013259200003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 323-330
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
323

dulum with a different pivot point when it drops to
its knees and so forth. This method enables the robot
to drop both forwards and backwards from a standing
position. (Ha and Liu, 2015) take a similar approach
by modeling the fall of the robot as a series of inverted
pendulums. Multiple contact points with the ground
are planned such that they maximally distribute the
kinetic energy of the fall across each point instead of
one contact point taking the brunt of the fall. This ap-
proach can manage more dynamic scenarios and can
execute a rolling strategy if the original velocity of the
robot is so high as to require it.
Whereas the aforementioned approaches seek to
minimize damage to the robot itself, (Yun et al., 2009)
take a different approach by steering the robot during
its fall in such a way as to avoid falling on nearby ob-
jects and damaging them. The relation between the
robots center of mass and its base support polygon
determines the balance of the robot and the direction
of its fall. The robot can then change its fall direction
by altering the base support polygon by stepping in-
telligently so that the leading edge of the polygon is
oriented away from the object that it wishes to avoid.
While the previously described safe falling meth-
ods dealt with low velocity falls from a standing posi-
tion, (Ha et al., 2012) have developed a real-time con-
troller that allows a physically simulated character to
land safely from a variety of heights and initial ve-
locities by rolling upon contact with the ground. The
controller first plans a landing strategy and how it will
roll once on the ground depending on the initial veloc-
ity and rotation. It then continually changes its pose in
mid-air to manipulate its moment of inertia in order to
arrive in the position calculated at the beginning and
executes a safety roll or a dive roll to better disperse
the kinetic energy of the fall. Since the calculations
are done in real time the controller is robust against
external perturbations and is able to land in the de-
sired pose even after unexpected mid-air collisions.
2.2 Machine Learning Approaches to
Animation
Machine learning has found many uses in the broad
discipline of animation. One example would be pose
estimation which is a computer vision task that aims
to estimate the position and orientation of a person or
object. Pose estimation can help speed up the process
of animating from a video reference by obviating the
need to manually match the poses between the ani-
mated character and the video.
A different approach, that aims to produce the
animation itself, is to train the character controllers
of physically simulated characters using a group of
machine learning techniques known as reinforcement
learning (RL). In contrast to traditional supervised
machine learning approaches where the goal is usu-
ally classification and where the model is trained on
an existing dataset with labeled examples, reinforce-
ment learning models do not use datasets but rather
interact with their environment to gain experience
and learn a behavior policy that aims to maximize
some reward function over time. An example would
be an RL model for playing video games where the
model is let loose inside an instance of a game and
gradually learns to reach an increasingly higher score
through trial and error. Some subfields of reinforce-
ment learning are deep reinforcement learning, where
RL is combined with deep learning (suitable for very
large inputs like the entire rendered image of a video
game), and imitation learning, where instead of a re-
ward function, the learning is done by following ex-
ample actions demonstrated by an expert with some
techniques even having access to the expert at train-
ing time meaning that they can query the expert for
more examples if necessary.
One such example of an RL agent exploring pos-
sible actions in its environment can be found in the
work of (Yin et al., 2021) in which they trained a
character controller to discover various high jump
techniques via deep reinforcement learning. For the
run-up, they trained a separate controller to imitate
motion capture data of a run-up while also ending
up in the desired takeoff state. Since the aim is to
explore diverse jumping techniques, they varied the
takeoff state using a novel Bayesian diversity search
approach. After the takeoff and once in the air, nat-
ural looking poses were achieved by a Pose Varia-
tional Autoencoder with natural body poses extracted
from a motion capture database. To ensure that the
task of jumping over the bar wasn’t too hard to learn,
curriculum learning (Narvekar et al., 2020) was em-
ployed wherein the height of the bar, and thereby the
challenge, was gradually increased as the policy im-
proved, similarly to how people learn in reality.
(Yu et al., 2019) designed a character controller
for a physically simulated figure skater that can per-
form various tricks. They used video footage of fig-
ure skating to extract key poses using pose estima-
tion and applied trajectory optimization to construct a
trajectory that visits all poses. Using deep reinforce-
ment learning they generated a robust controller that
can perform various figure skating skills. In their sub-
sequent work (Yu et al., 2021), the authors used 3D
pose estimation and contact estimation on monocu-
lar video footage of highly dynamic parkour motions.
For each frame of video, they extracted the 3D pose
of the athlete and used a contact estimator to esti-
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
324
mate whether the feet and hands were in contact with
the environment. Combining pose and contact data,
they were able to reconstruct the full motion trajec-
tory from the video of a single panning camera. Using
deep reinforcement learning they coached a motion
controller inside a physical simulation to replicate the
exact movements extracted from the original video.
All of the aforementioned ML approaches do not
generate animations in real time, making them unsuit-
able for interactive scenarios. Luo et al. (Luo et al.,
2020) use imitation learning to train a directable, real
time motion controller to imitate reference animations
of various gaits of a quadruped. A generative ad-
versarial network is then used to train high level di-
rectives like speed and direction of movement and,
finally, deep reinforcement learning is employed to
train the controller to be more resistant to external per-
turbations. Tessler et al. (Tessler et al., 2023) take a
similar approach by using motion capture data to train
a humanoid motion controller to mimic it, but instead
of training directly on the data they train on its statis-
tical distribution thereby allowing for natural looking
variations.
Reinforcement learning methods have also been
applied to the problem of safe falling covered in sec-
tion 2.1 such as in the work of (Kumar et al., 2017).
An actor-critic architecture was used to develop a con-
troller which minimizes the maximal impulse during
the robot’s fall with each contacting limb of the robot
having an actor-critic pair assigned to it. The discrete
problem of contact planning is solved by determining
the limb whose corresponding critic has the highest
value function at a given point in time and having it
be the one that will contact the ground next. The con-
tinuous control problem is solved via the optimization
of the actors.
3 ANIMATION SYSTEM
Our safe falling animation system utilizes a machine
learning approach wherein a reinforcement learning
agent learns to control a fully physically simulated
humanoid character by controlling the torque gener-
ated at each of the character’s joints. This places our
approach into the category of procedural animation
since there exists no predefined set of static anima-
tions. Instead, our system dynamically produces ani-
mations in real time by physically simulating the mo-
tion of the character.
We choose to use reinforcement learning because,
to our knowledge, there doesn’t exist a comprehen-
sive database of realistic falling animations that could
be used for training a controller by using imitation
learning. Furthermore, the few examples of motion
capture falling animations we could find have exag-
gerated motions that aren’t naturalistic.
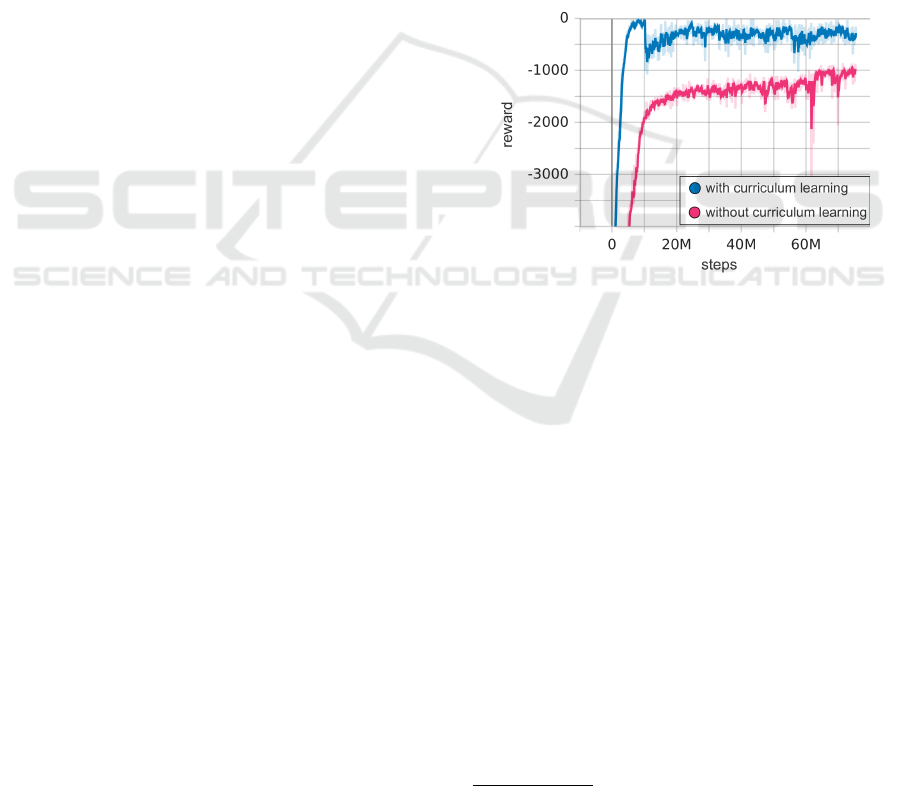
However, to help with convergence we also em-
ploy curriculum learning where we first present the
agent with an easier version of the problem (in our
case that’s a less strict reward function) after which
we gradually increase the difficulty once the agent
surpasses a certain predefined reward threshold or if
enough steps have passed. This helps the agent to
quickly converge to an approximate solution in the
first step of the curriculum, after which the solution is
refined through smaller tweaks in the following steps
of the curriculum. This can be seen on Figure 1 where
the reward for the approach without curriculum learn-
ing returns a lower reward at the end despite both ap-
proaches having an equally strict reward function at
that point.
-3000
-2000
-1000
0
Figure 1: Learning curve with and without curriculum
learning.
We use the MuJoCo
1
physics engine for physical
simulation and the PPO algorithm with default pa-
rameters to train the controller. Using the Gymna-
sium
2
API, we design a custom environment for the
RL agent to train in. Since Gymnasium already has
the Humanoid environment with a defined humanoid
character, we choose to adapt it for our needs.
3.1 Custom Learning Environment
We adapt the already existing Humanoid environment
that comes with Gymnasium, which is itself based on
the environment introduced by (Tassa et al., 2012).
Just like the original environment, our environment
consists only of the humanoid character and the floor
that it stands on, although we have changed the char-
acter model by adding a neck joint which enables the
character to tuck their head in.
1
https://mujoco.org/
2
https://gymnasium.farama.org/index.html
Beyond the Ragdoll: Designing a Safe-Falling Controller for Physically Simulated Characters
325

At the beginning of each training episode, the
character is pushed backwards in order to trigger a
fall. To ensure that the controller learns to handle dif-
ferent push forces, the strength of the initial push is
randomly chosen from a predefined range. If the char-
acter hits its head strongly enough, the episode termi-
nates prematurely and a big negative reward is given.
The reward function is structured thusly:
reward = healthy − head hit − ctrl − constr (1)
with the components having the following meaning:
• healthy - healthy reward, a constant positive re-
ward given for each elapsed training step.
• head hit - a fixed negative reward given upon a
strong enough head hit. Prematurely terminates
the episode.
• ctrl - a negative reward proportional to the square
of the agent’s control signals.
• constraint cost - a negative reward proportional
to the constraint forces acting on each part of the
character’s body. This represents outside forces
acting on the body (analogous to impact forces)
as well as forces that keep the joints together
(roughly analogous to forces going through the
tendons and ligaments). It’s only counted for
those forces that go above a certain threshold.
As mentioned earlier, the curriculum changes the
reward function to be more forgiving at earlier steps
by increasing the threshold above which constraint
forces will be counted in constraint cost. Addition-
ally, we found that disabling head hit cost in the first
step of the curriculum helps to produce a more natu-
ral looking results where the character doesn’t contort
itself into unnatural shapes in order to avoid hitting its
head.
3.2 Resulting Character Controller
As can be seen in the accompanying video
3
, the
trained character controller exhibits different behav-
iors depending on the strength of the initial push.
At weaker and medium push strength, the character
pushes off of the ground in order to create a forward
rotation which counteracts the initial backwards ro-
tation of the push. The character lands in a crouch
with its hands touching the floor in front of it to in-
crease stability. At higher push strength, the character
performs a roll onto its back (see Figure 2) because
the push is so strong that the character cannot gener-
ate enough forward rotation to counter it. However, a
3
https://bit.ly/4fVCwWH
backwards roll also helps to prolong the fall, spread-
ing out the impact over a longer period of time thereby
making it safer. The backwards roll can be seen in
real life in situations when one is falling backwards at
significant speeds, e.g. when landing in parkour. Ad-
ditionally, another behavior emerges during the back-
wards roll, namely the character puts one of its arms
above and behind the head to halt the roll and prevent
it from going over the head.
Figure 2: Example motions from the two animation systems
compared in the user study. Top row - motion capture, bot-
tom row - our RL system.
4 USER STUDY
In order to test how our animation system compares
to a more established approach, we have conducted
a user study where we compare animations produced
by our approach to animations recorded via motion
capture. To enable us to effectively compare anima-
tions produced by our system with other types of an-
imation, we made a custom program using the Unity
game engine.
In order to direct focus onto the animations them-
selves instead of the 3D humanoid model, we use
the same, abstract humanoid model that comes with
MuJoCo for both animation systems. This also helps
to avoid presentation differences between the motion
capture’s 3D model and our system’s 3D model from
impacting user scores. Another reason for choosing to
use MuJoCo’s model over a more realistic humanoid
model is the fact that the animation data from mo-
tion capture can be trivially mapped onto MuJoCo’s
simpler humanoid model whereas there is no simple
and unique mapping from joint positions in MuJoCo
onto a more complex humanoid model. Since Mu-
JoCo’s model has fewer degrees of freedom than the
animation skeleton of the motion capture animations
(it lacks hands and feet) the motion capture skeleton
would be left underactuated.
4.1 Program for Comparing
Animations
We designed a program for comparing animations
which showcases one animation system at a time with
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
326
the ability to switch between animation systems at
will. These two animation systems are our RL ani-
mation system and a simple motion capture animation
system. The RL and motion capture systems are rep-
resented by two scenarios, Scenario X and Scenario
Y, respectively. The scenario names are not descrip-
tive so as not to give away the nature of the animation
system currently in use, since this could inadvertently
influence the participant’s ratings.
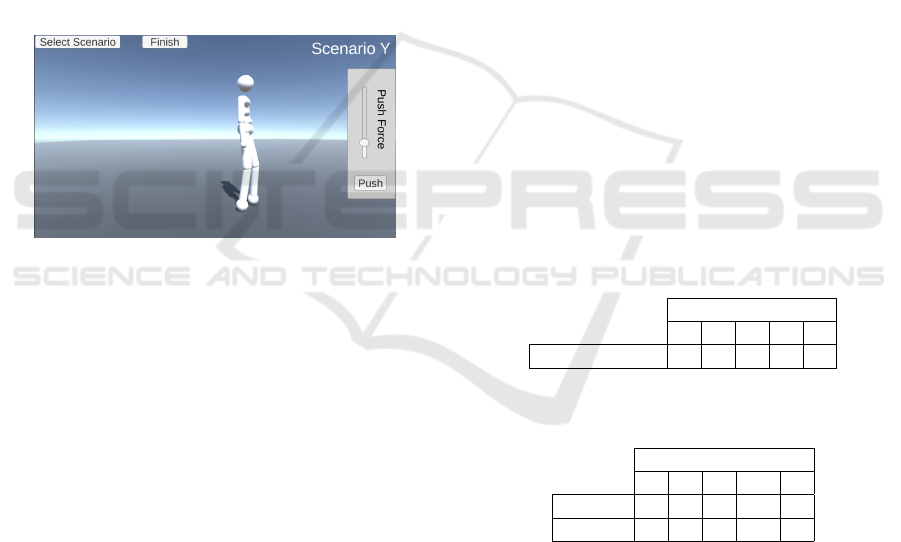
The main view of the program can be seen on Fig-
ure 3 where the character is placed near the middle of
the screen with UI elements on the right side which
enable the user to push the character backwards. The
slider controls the strength at which the character will
be pushed and clicking the ”Push” button will initi-
ate a falling motion using the current animation sys-
tem. After an animation finishes, the character ap-
pears back at its original standing spot, ready to be
pushed again.
Figure 3: Main view of the animation comparison program.
The animation system that uses motion capture is
constructed using an animation state machine consist-
ing of 4 states: idle, light, medium and hard. Depend-
ing on the the strength of the push, the system tran-
sitions from the idle state into one of the other three.
This way, the motion capture animation system can
still react in proportion to the strength of the push, but
not as granularly as the RL animation system. To load
and play motion capture animations, the program uses
Unity’s inbuilt functionality. The position and rota-
tion of the animation bones are read from the anima-
tion clip and the 3D model is manipulated to exactly
match the current pose from the animation clip.
On the other hand, to play animations from Mu-
JoCo, the program has to communicate with a run-
ning instance of MuJoCo’s physics simulation. On
each new frame in Unity, the program requests and
subsequently receives pose data of the humanoid (in
the form of the position and rotation of each bone)
from the running physics simulation. This pose data
is then used to make the 3D model assume the exact
pose that the simulated humanoid currently has in the
physics simulation. Upon clicking the ”Push” button,
the program sends the strength of the push (read from
slider) to the MuJoCo instance which resets the envi-
ronment with the received push strength as the param-
eter and starts simulating. When the episode finishes,
the simulation pauses until another command to reset
the environment is received.
4.2 Participants
We involved 25 participants in the study (14 female
and 11 male). We chose the number of participants
in accordance with ITU-T recommendations (ITU-T,
2022). Participants are aged between 22-67 with the
average age being 30.16 and the median age being 28.
The participants report their level of familiarity
with 3D action video-games on a 5-point Likert scale
with ”Never played” on the lowest end of the scale
and ”Played extensively” on the highest end of the
scale. The genres of sports games and combat ori-
ented games were listed as examples of 3D action
video-games. Participants also report how important
animation realism and animation variety are to them
in the context of video games, also on a 5-point Likert
scale with ”Not important at all” on the lowest end of
the scale and ”Very important” on the highest end of
the scale. The distribution of the participants’ experi-
ence with 3D action video-games is shown in Table 1
and the reported importance of animation realism and
animation variety is shown in Table 2.
Table 1: Participants’ experience with 3D action video-
games.
familiarity level
1 2 3 4 5
# of responses 5 3 4 6 7
Table 2: Participants’ reported importance of animation re-
alism and animation variety.
importance
1 2 3 4 5
realism 0 1 8 9 7
variety 0 5 6 11 3
Participants were also asked whether they had par-
ticipated in activities where falling is commonplace
(e.g. martial arts, rollerblading, gymnnastics, park-
our etc.) because of the assumption that those who do
have experience with falling might answer questions
about safe falling differently to those who do not.
4.3 Questionnaire
Our questionnaire consists of eight questions whose
aim is to assess the users’ personal opinion on 8
different aspects of the animations produced by our
Beyond the Ragdoll: Designing a Safe-Falling Controller for Physically Simulated Characters
327

RL animation system, namely animacy, anthropo-
morphism, gracefulness, surprise, likeliness, injury,
realism and reactivity.
Questions about animacy and anthropomorphism
are meant to gauge whether the character passes as
human, questions about gracefulness and injury are
meant to gauge the perceived level of the character’s
skill, questions about surprise, likeliness and real-
ism are meant to gauge whether the character is con-
vincing, and the question about reactivity is meant to
gauge whether our RL approach is significantly more
interactive than motion capture.
Inspired by the Godspeed Questionnaire for Hu-
man Robot Interaction (Bartneck et al., 2009), we
opted to use 5-point semantic differential scales
meaning that participants were asked to indicate
their position on a scale between two bipolar
words, the anchors. Five questions were posed
as semantic differential scales: animacy (Me-
chanical/Organic), anthropomorphism (Not human-
like/Humanlike), gracefulness (Clumsy/Graceful),
surprise (Surprising/Expected) and reactivity (Un-
changing/Reactive). The question about animacy
was taken directly from the Godspeed Questionnaire,
whilst the one about anthropomorphism was adapted
from the questionnaire. We used 5-point Likert scales
for the other three aspects by posing the following
questions - ”Is a person likely to fall similarly to
how the character fell?” for likeliness, ”Does it look
like the character injured themselves?” for injury, and
”Does it look like the character’s movements follow
the laws of physics?” for realism.
4.4 Study Procedure
Testing begins with participants signing a written con-
sent form that describes the kinds of data that is col-
lected. Further, participants are asked to provide de-
mographic information (gender and age) and to de-
scribe their level of experience with 3D action video-
games, and how important animation realism and ani-
mation variety are to them. Additionally, participants
are asked whether they have participated in an activity
where falling is commonplace
After providing demographic data, the partici-
pants begin using the animation comparison program
which randomly shows them one of two scenarios.
Participants are instructed to push the character as
many times as they want while varying the push
strength with the aim of developing an opinion on the
character’s movement. After the participants feel that
they have watched the character fall a sufficient num-
ber of times, they fill out the questionnaire described
in 4.3. Once they’ve filled out the questionnaire, the
participants return to the program and switch to the
other scenario. They repeat the process of forming
an opinion on the character’s movement after which
they again fill out the same questionnaire as before,
this time rating the animation system from the sec-
ond scenario. Finally, after having filled out question-
naires for both scenarios, they choose which scenario
they prefer overall - Scenario X, Scenario Y or No
preference.
4.5 Study Results
The participants’ ratings for each question in the two
questionnaires can be seen in Figure 4 in the form of
a diverging bar chart. The proportions of responses to
each of the questions are shown in their corresponding
stacked bar chart and all of the stacked bar charts’
”neutral” sections (representing the proportion of ”3”
ratings on a 5-point scale) are aligned in the middle
to allow for a better visual overview. The more a bar
chart is to the right, the more participants answered
towards the right part of the scale, and vice versa.
What can be seen is that for every question except
for injury and reactivity, the motion capture system
received higher scores. Comparing whether there is a
difference between systems by running a Wilcoxon
Signed-Rank Test on each pair of questions, it is
shown that there does exist a statistically significant
difference (Organic p = 0.002, Humanlike p < 0.001,
Graceful p = 0.042, Expected p = 0.002, Likely p <
0.001, Realism p = 0.002, Reactivity p = 0.038) for
every question except (Injury p = 0.94), even after
adjusting p-values via the Benjamini-Hochberg pro-
cedure because of testing multiple hypotheses. This
is consistent with the answers of overall preference
where, out of 25 participants, 22 prefer the motion
capture system, 2 have no preference, and 1 prefers
the RL system.
Running ANOVA (Analysis of Variance) tests to
check whether falling experience influences injury
ratings and whether 3D action video-game experience
influences reactivity shows no statistically significant
correlations (Injury p = 0.670, Reactivity p = 0.958)
In conclusion, the results indicate that users do
perceive the RL system to be more reactive, which is
in agreement with the stated aim of developing an RL
based animation system. On the other hand, the sys-
tem doesn’t produce animations that look safer than
motion capture and, additionally, all other aspects of
the animation suffer to varying degrees.
4.5.1 Participants’ Comments
Looking at participants’ comments about the RL sys-
tem, one of the more common comments is that the
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
328
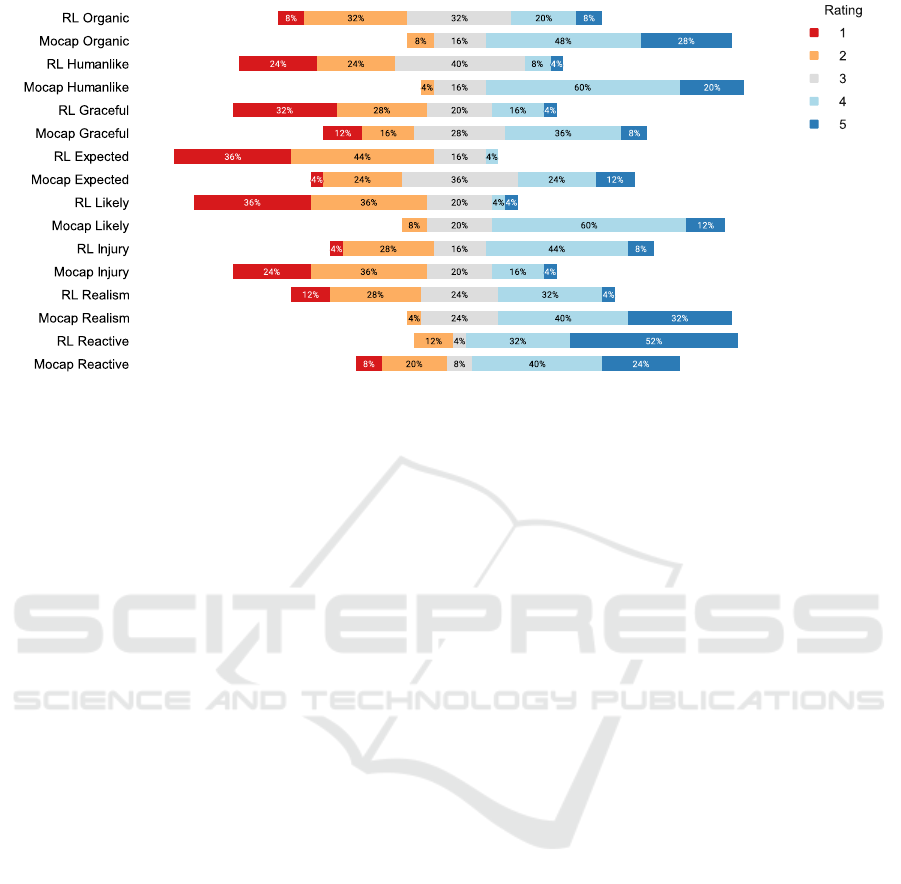
Figure 4: Participants’ ratings for each question on a diverging bar chart.
character is twitchy and too curled up after landing
from a push at low strength, with one participant com-
menting that it reminds them of insect behavior. Par-
ticipants also expressed confusion about where on the
body the character is pushed which might have made
it more difficult for them to appropriately rate like-
liness and reactivity. For the motion capture sys-
tem, multiple participants have expressed that the fall
looks overly dramatic or like the character is faking
the push. For both systems, participants have com-
mented that high velocity falls look more natural.
5 DISCUSSION AND FUTURE
WORK
Regarding high velocity falls looking more natural in
both systems, for RL this could be the case because
the character rolls onto their back instead of just land-
ing in a crouch. For motion capture this could be the
case because at high velocities the stunt actor has less
room to act or dramatize since they have to take more
care not to hurt themselves.
Regarding lower animacy and anthropomorphism
scores for the RL system, we plan to improve this by
further tweaking the reward function to reduce any
twitchy motion. We also plan to make the humanoid
model more realistic by making individual parts of
the body more resilient or less resilient against large
forces in accordance with human anatomy, thereby
guiding the controller towards more realistic behav-
ior. Likeliness and anthropomorphism could also be
improved by involving human feedback in the train-
ing loop like is done in Reinforcement Learning from
Human Feedback or through a method similar to (Ha
and Liu, 2014) where commands like ”straighten the
legs more” could be issued to the optimizer.
The majority overall preference for the motion
capture system may be explained by the choice of
a flat environment without any obstacles scattered
throughout which favors motion capture since it is
likely the exact environment in which the original mo-
tion was captured by the performer. On the other
hand, a procedural approach, such as the one we de-
veloped, shows its strength in more complex, unpre-
dictable environments with uneven ground or obsta-
cles in the way of the fall. In such complex en-
vironments, motion capture animations might clip
through or get stuck on surrounding geometry with-
out the appropriate physical reaction that procedural
approaches can provide. In our future work we plan to
train the controller in environments that could involve
uneven terrain, slopes, obstacles, drops, etc. These
more complex environments might, however, make
convergence more difficult.
An alternate procedural approach that focuses on
realistic motion would be to use motion capture as a
baseline by employing imitation learning, with rein-
forcement learning allowing for the introduction of
reactivity, similarly to (Luo et al., 2020), although
this might limit the controller to only those scenarios
available in motion capture which is almost always on
flat ground.
Ultimately, despite the RL system’s on average
lower scores on various aspects compared to the mo-
tion capture system, our RL animation system can
nevertheless be considered as a viable alternative to
motion capture in cases where reactivity and anima-
tion variety are the primary concerns. This is often
the case in games which have motion controls, no-
tably VR games, that allow the player to interact with
Beyond the Ragdoll: Designing a Safe-Falling Controller for Physically Simulated Characters
329

virtual characters at a much more granular level than
in traditional games. Nevertheless, further efforts in
improvment of overall acceptability of RL generated
animations are needed.
6 CONCLUSION
In this paper we describe the design of a safe falling
animation system based on reinforcement learning
and present the results of a user study comparing said
animation system with an animation system based on
motion capture.
Our animation system consists of a reinforcement
learning agent that controls an articulated, fully phys-
ically simulated 3D humanoid character. The charac-
ter is pushed backwards while standing on flat ground
and the controller tries to minimize the impact of the
character with the ground and the forces inside the
character’s joints. The PPO algorithm is used for
training the controller and curriculum learning is em-
ployed in order to help with convergence.
We conduct a user study comparing the RL ap-
proach with a motion capture approach whilst keep-
ing the surface presentation the same by using the
same humanoid 3D model in both animation systems.
The participants are instructed to make the charac-
ter fall by pushing it at varying strengths and to de-
velop an opinion on the resulting movement. They
are subsequently given a questionnaire in which they
rate the character’s movement on 8 different aspects
on 5-point semantic differential scales. This testing
procedure is carried out for both animation systems
individually.
Results show a statistically significant difference
in ratings between the two systems for all but one as-
pect (injury), with the motion capture system being
rated more favorably in 6 out of 8 aspects, and the
RL system being rated more favorably in reactivity.
The impact of background variables (experience with
falling, previous gaming experience) on ratings of in-
jury and reactivity, respectively, is shown to not be
statistically significant.
ACKNOWLEDGEMENTS
This research was fully supported by the Croatian
National Recovery and Resilience Plan (NPOO) un-
der the project Research and Development of Multi-
ple Innovative Products, Services and Business Mod-
els Aimed at Strengthening Sustainable Tourism and
the Green and Digital Transition of Tourism (ROBO-
CAMP), with grant number NPOO.C1.6.R1-I2.01.
REFERENCES
Bartneck, C., Kuli
´
c, D., Croft, E., and Zoghbi, S. (2009).
Measurement instruments for the anthropomorphism,
animacy, likeability, perceived intelligence, and per-
ceived safety of robots. Intl. journal of social robotics,
1:71–81.
Ha, S. and Liu, C. K. (2014). Iterative training of dynamic
skills inspired by human coaching techniques. ACM
Transactions on Graphics (TOG), 34(1):1–11.
Ha, S. and Liu, C. K. (2015). Multiple contact planning
for minimizing damage of humanoid falls. In 2015
IEEE/RSJ Intl. Conference on Intelligent Robots and
Systems (IROS), pages 2761–2767. IEEE.
Ha, S., Ye, Y., and Liu, C. K. (2012). Falling and landing
motion control for character animation. ACM Trans-
actions on Graphics (TOG), 31(6):1–9.
ITU-T (2022). P. 910: Subjective video quality assessment
methods for multimedia applications. pages 15–16.
Kumar, V. C., Ha, S., and Liu, C. K. (2017). Learning a uni-
fied control policy for safe falling. In 2017 IEEE/RSJ
Intl. Conference on Intelligent Robots and Systems
(IROS), pages 3940–3947. IEEE.
Luo, Y.-S., Soeseno, J. H., Chen, T. P.-C., and Chen, W.-C.
(2020). Carl: Controllable agent with reinforcement
learning for quadruped locomotion. ACM Transac-
tions on Graphics (TOG), 39(4):38–1.
Narvekar, S., Peng, B., Leonetti, M., Sinapov, J., Taylor,
M. E., and Stone, P. (2020). Curriculum learning for
reinforcement learning domains: A framework and
survey. The Journal of Machine Learning Research,
21(1):7382–7431.
Rossini, L., Henze, B., Braghin, F., and Roa, M. A. (2019).
Optimal trajectory for active safe falls in humanoid
robots. In 2019 IEEE-RAS 19th Intl. Conference on
Humanoid Robots (Humanoids), pages 305–312.
Tassa, Y., Erez, T., and Todorov, E. (2012). Synthesis and
stabilization of complex behaviors through online tra-
jectory optimization. In 2012 IEEE/RSJ Intl. Confer-
ence on Intelligent Robots and Systems, pages 4906–
4913. IEEE.
Tessler, C., Kasten, Y., Guo, Y., Mannor, S., Chechik, G.,
and Peng, X. B. (2023). Calm: Conditional adver-
sarial latent models for directable virtual characters.
In ACM SIGGRAPH 2023 Conference Proceedings,
pages 1–9.
Yin, Z., Yang, Z., Van De Panne, M., and Yin, K. (2021).
Discovering diverse athletic jumping strategies. ACM
Transactions on Graphics (TOG), 40(4):1–17.
Yu, R., Park, H., and Lee, J. (2019). Figure skating simu-
lation from video. In Computer graphics forum, vol-
ume 38, pages 225–234. Wiley Online Library.
Yu, R., Park, H., and Lee, J. (2021). Human dynamics from
monocular video with dynamic camera movements.
ACM Transactions on Graphics (TOG), 40(6):1–14.
Yun, S.-k., Goswami, A., and Sakagami, Y. (2009). Safe
fall: Humanoid robot fall direction change through in-
telligent stepping and inertia shaping. In 2009 IEEE
intl. conference on robotics and automation, pages
781–787. IEEE.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
330
