
Usage of Police Surveillance Drone for Public Safety
Donna Mariya David
a
, Abdul Adnan
b
and Abhishek H
c
Department of Electrical and Electronics Engineering, Dayananda Sagar College of Engineering,
Bengaaluru, Karnataka, India
Keywords: Autonomous, Public Safety, Law Enforcement, Emergency Response, Real Time Data Processing, Machine
Learning.
Abstract: This paper presents a framework for utilizing autonomous drones to enhance public safety. The proposed
system leverages advanced methodologies in autonomous navigation and real-time data processing to address
critical challenges in law enforcement and emergency response. The drone operates independently, capturing
high-resolution images of crime scenes, conducting surveillance over vast areas, and detecting suspicious
activities such as theft. By integrating machine learning algorithms, the drone is capable of identifying and
tracking individuals or objects of interest, providing actionable insights to authorities in real time. This work
outlines the system’s architecture, operational workflow, and key technologies, emphasizing its adaptability
to dynamic environments and diverse applications. The paper also discusses the societal implications,
potential challenges, and future directions for deploying autonomous drones in public safety scenarios.
Through rigorous analysis and experimental validation, this study demonstrates how autonomous drones can
serve as a transformative tool in modern law enforcement, promoting safety and security across communities.
1 INTRODUCTION
In an era where public safety concerns are
increasingly paramount, especially in both urban and
rural set- tings, the need for rapid and effective
response mechanisms have been more critical.
Traditional emergency response systems often face
challenges in reaching crime scenes promptly,
leaving communities vulnerable in times of crisis. To
address these challenges, our project introduces an
innovative solution: an autonomous drone designed
specifically for public safety applications. This drone
not only enhances surveillance capabilities but also
integrates seamlessly with a dedicated protection
application. The proposed drone system operates
autonomously to monitor and traverse various
environments, providing real-time aerial support to
law enforcement agencies. In situations where
individuals feel threatened or are in danger, the
accompanying mobile application allows users to
alert authorities with a simple press of a button. This
action triggers the drone to navigate directly to the
a
https://orcid.org/0009-0001-2469-8090
b
https://orcid.org/0009-0006-7013-2481
c
https://orcid.org/0009-0009-4457-3234
user’s location ensuring a swift response. Upon
arrival the drone captures high- resolution imagery of
the scene. facilitating immediate assessment and
documentation of potential threats. A key feature of
our system is the integration of machine learning
techniques to analyse video feeds and sensor data for
identifying suspicious behaviours or activities. By
training algorithms on diverse datasets, the drone can
recognize patterns indicative of potential threats,
enabling proactive intervention and enhancing
situational awareness for law enforcement. This
capability not only aids in crime scene documentation
but also facilitates real- time decision- making by
providing actionable insights. In this paper, we will
explore the methodologies underpinning our
autonomous drone system, focusing on its operational
framework and the critical role of machine learning
in enhancing safety. Through this approach, we aim
to contribute to safer environments by harnessing the
power of technology and data driven insights in
public safety initiatives.
Mariya David, D., Adnan, A. and H, A.
Usage of Police Surveillance Drone for Public Safety.
DOI: 10.5220/0013652700004639
In Proceedings of the 2nd International Conference on Intelligent and Sustainable Power and Energy Systems (ISPES 2024), pages 171-177
ISBN: 978-989-758-756-6
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
171

2 REVIEWS OF EXISITING
MODELS
The incorporation of drones into public safety
initiatives has significantly transformed the landscape
of law enforcement and emergency response. Models
such as the JOUAV CW Series and Height
Technologies SAMS exemplify the cutting- edge
advancements that enhance surveillance and
operational effectiveness. The JOUAV CW Series is
particularly notable for its extensive range and
impressive flight duration, making it well-suited for
monitoring large areas, such as borders or critical
infrastructure. In contrast, the SAMS drone system
operates autonomously, allowing for continuous
surveillance without requiring constant human
supervision. This capability not only improves
situational awareness but also facilitates quicker
responses to incidents, thereby bolstering com safety.
Skydio drones can be quickly launched from patrol
vehicles, providing immediate aerial perspectives on
developing situations. This real-time visibility is
crucial for law enforcement to assess incidents
effectively before arriving on the scene. Similarly,
GAO Tek’s drones utilize advanced sensors and
machine learning algorithms to monitor suspicious
activities and gather critical data efficiently,
showcasing how technology can enhance crime
prevention efforts.
3 GAP ANALYSIS
The current landscape of drones designed for public
safety includes a range of models with each offering
unique features tailored to specific operational needs.
While these established models excel in areas like
autonomous navigation, high-resolution imaging, and
real-time data transmission, they often lack
comprehensive user engagement mechanisms that
empower citizens to actively participate in their own
safety. Most existing systems are primarily designed
for law enforcement use and do not provide a direct
interface for the general public to alert authorities in
emergencies. In contrast, the proposed drone model
is paired with a mobile application that allows anyone
to utilize its capabilities for public safety. In situations
where in- dividuals feel threatened or are in danger,
they can simply press a button on the app to send an
immediate alert along with their location to the drone.
Upon receiving an alert from the app, the drone can
autonomously navigate to the user’s location and
analyze the environment for potential threats. This
proactive approach allows law enforcement to assess
situations more effectively upon arrival, ultimately
improving public safety outcomes. By integrating
user engagement through our app with advanced
drone technology, our model represents a significant
advancement over current offerings in the public
safety drone market. This user-friendly feature
addresses a significant gap in existing models by
enabling rapid response from the drone without
requiring prior training or specialized knowledge.
The integration of this app not only enhances
community engagement but also ensures that help can
be dispatched quickly and efficiently
4 METHADOLOGY
This section outlines the design and assembly of a
drone system that integrates essential hardware
components, including motors, electronic speed
controllers, and a Raspberry Pi as the central
processing
unit. The second part talks about the
programming phase which incorporates machine
learning algorithms and advanced image
processing
techniques using OpenCV and TensorFlow Lite
4.1 Design and Assembly of Hardware
Once the frame is established, we proceed to assemble
the essential components, including motors,
electronic speed controllers (ESCs), propellers, and a
power distribution board. Each motor is paired with
a propeller to generate sufficient lift, while the ESCs
regulate power delivery based on input from the flight
controller. In addition to these core components,
several auxiliary elements are integrated into the
drone system. The Raspberry Pi acts as the central
processing unit, managing data from various sensors,
including the GPS module for location tracking and
ultrasonic sensors for obstacle detection. This
configuration allows for autonomous navigation and
real time decision-making, critical for effective
operation in dynamic environments. Communication
is facilitated through a GSM module, which connects
the drone to a mobile application used by individuals
in distress, allowing them to send alerts with their
location. The telemetry module enables real-time data
transmission between the drone and ground control,
providing operators with live video feeds and sensor
information. The onboard camera captures high-
resolution images and video for surveillance purposes,
with image processing handled by OpenCV to
enhance data quality. Together, these components
create a cohesive system that enhances situational
ISPES 2024 - International Conference on Intelligent and Sustainable Power and Energy Systems
172
awareness and enables rapid responses to
emergencies.
4.2 Programming and Integration
The subsequent phase focuses on programming the
flight controller, which acts as the central processing
unit for the drone’s operations. The flight controller
is configured to interpret data from the GPS module
and various sensors, enabling autonomous navigation
and obstacle avoidance capabilities. Machine
learning algorithms are implemented to enhance the
drone’s ability to analyze sensor data in real time for
detecting suspicious activities. These algorithms are
are trained on diverse datasets to improve their
accuracy in identifying potential threats.A crucial
aspect of this research is the development of a
dedicated mobile application that allows users to
engage with the drone system directly. In emergency
situations, individuals can alert authorities by
pressing a button within the app, which sends their
location to the drone. Upon receiving this alert, the
drone autonomously navigates to the user's location
while simultaneously analyzing its surroundings for
any signs of danger. The mentioned are the key
software components employed in the project
OpenCV: For image processing.
TensorFlow Lite: For optimized deep learning
models. YOLOv4-tiny or MobileNet: For real-time
object detection
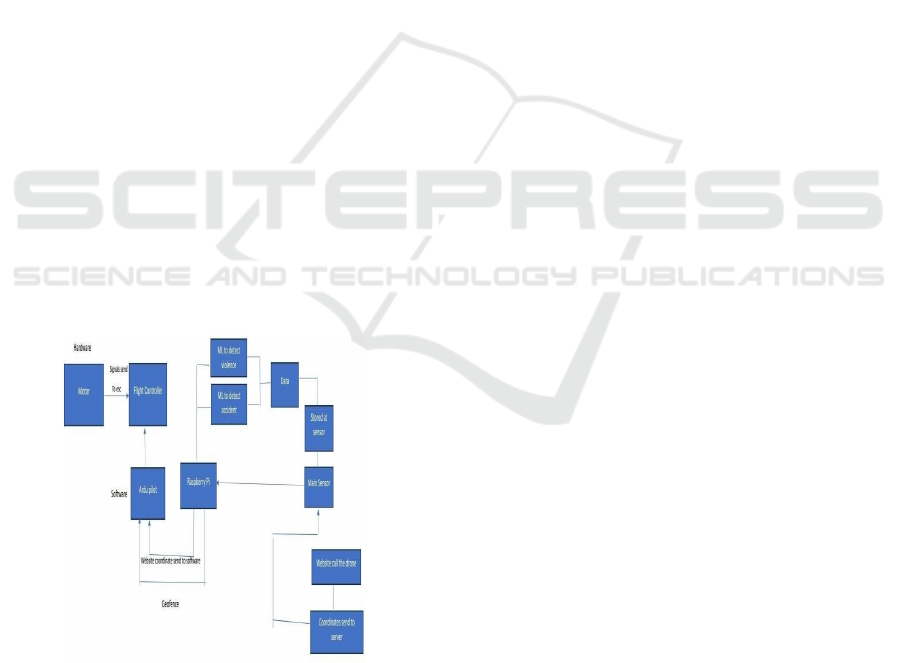
4.3 Block Diagram
Figure 1: Block Diagram of the drone system.
4.3.1 Code Used for Facial Recognition
This code provides a straightforward implementation
of a facial recognition system that leverages the
capabilities of the face recognition library and
OpenCV. It captures live video from a webcam,
processes each frame to identify faces, and matches
these faces against a predefined set of known
encodings. This system can be applied in various
contexts, including security monitoring, user
verification, and automated attendance systems.
Import face_rec
ognition
import
cv2
video_capture = cv2.VideoCapture(0)
known_face_encodings = [] # Add your
known faces' encodings here
known_face_names = [] # Add the
corresponding names for the known faces
while True:
ret, frame =
video_capture.
read()
rgb_frame =
frame[:, :, ::-1]
# Find all face locations and
encodings in the current frame
face_locations =
face_recognition.face_locations(rgb_frame)
face_encodings =
face_recognition.face_encodings(rgb_frame,
face_locations)
for (top, right, bottom, left), face_encoding in
zip (face_locations, face_encodings): matches
=
face_recognition.compare_faces(known_face_
encodings, face_encoding)
It implements a basic facial recognition system
using the face recognition library and OpenCV. It
initializes video capture from the webcam and
continuously reads frames in a loop. Each captured
frame is converted from BGR to RGB format, which
is necessary for face detection.
The code detects faces in the frame and computes
their encodings, which are numerical representations
of the faces. It then compares these encodings against
a predefined list of known face encodings to identify
matches.
4.3.2 Machine Learning Data
The dataset will comprise a diverse collection of
video clips and images that depict various scenarios,
including physical confrontations, aggressive
gestures, and peaceful interactions, enabling the
model to learn the key characteristics that
differentiate these categories. Dataset encompasses a
wide range of scenarios depicting violence, non-
Usage of Police Surveillance Drone for Public Safety
173

violence, accidents etc.
4.3.3 Data for Violence
Figure 2: Machine Learning data for violence.
4.3.4 Data for Non-Violence
Figure 3: Machine Learning data for non-violence.
4.3.5 Data for Accidents
Figure 4: Machine Learning data for accidents.
4.3.6 Design of the App
i.
User Login:
Upon launching the app, users must log in to their
accounts for security and personalization .After
successful login, users are presented with the main
interface of the app.
Figure 5: Main interface of the app.
ii.
Initiating the call
Users will see a prominent button labeled "Call
Drone.”, When the button is pressed, the.app sends
the user's current GPS location to the drone
Figure 6. Emergency button to call the drone.
iii.
Visual Feedback:
The app displays a notification indicating "Calling the
Drone," confirming that the request has been
successfully transmitted.
iv.
Emergency Response:
The drone receives the location and begins it’s
autonomous navigation to assist the user in distress.
Fig 7. Feedback of the Emergency Response
ISPES 2024 - International Conference on Intelligent and Sustainable Power and Energy Systems
174
5 WORKING AND WORKING
MODEL
Figure 8: Working Police Surveillance Drone Model.
The process begins when a user interacts with the
mobile plication designed specifically for public
safety. In the event of an emergency or when an
individual feels threatened, they can activate an alert
by pressing a button within the app. This action sends
a notification that includes the user’s current GPS
coordinates to the drone. The communication is
facilitated through the GSM module integrated into
the drone, ensuring swift and reliable transmission of
the alert. Once the drone receives the alert, its flight
controller initiates the autonomous navigation
process. The GPS module determines the exact
location of the user and transmits this information to
the Raspberry Pi, which processes it to establish the
most efficient route to reach the user. The drone
employs pre-programmed flight algorithms to
navigate its environment while utilizing ultrasonic
sensors to detect and avoid obstacles in real time. This
capability allows the drone to maneuver safely
through complex urban or rural settings. As the drone
approaches the user's location, it activates its onboard
camera to capture high-resolution images and video
footage of the area. This data is crucial for
documenting any incidents or potential threats
present at the scene. Concurrently, machine learning
algorithms running on the Raspberry Pi analyze data
from various sensors, including video streams from
the camera and readings from ultrasonic sensors.
These algorithms are designed to identify suspicious
activities based on specific behavioural patterns,
enabling effective assessment of potential risks.
Throughout it’s mission, the drone maintains
continuous communication with ground control via
its telemetry module. This connection allows for real-
time transmission of video feeds and sensor data back
to monitoring personnel or law enforcement agencies.
Operators at ground control can evaluate live footage
and sensor information to make informed decisions
regarding further actions or resource allocation. If
suspicious behaviour is detected or if additional
assistance is deemed necessary, ground control can
initiate an appropriate response based on insights
provided by the drone. This may involve dispatching
law enforcement officers to investigate further or
implementing other emergency protocols as required.
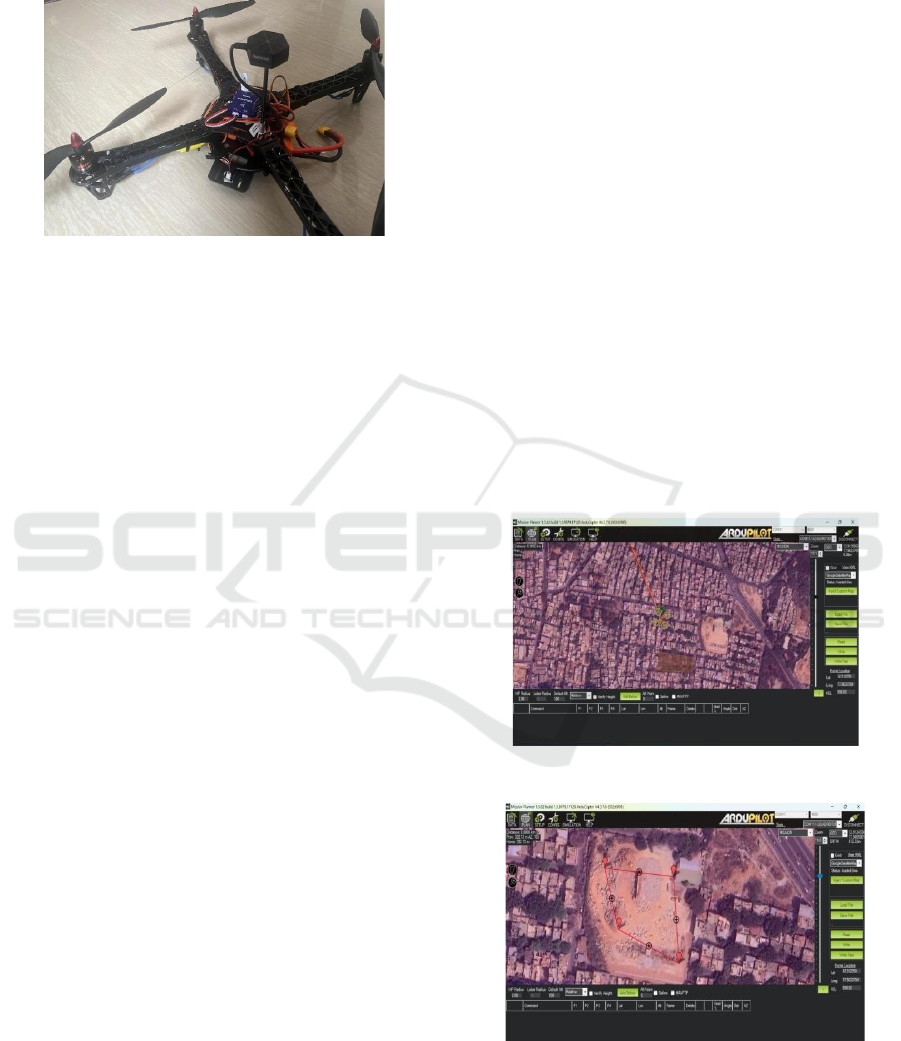
6 RESULTS
6.1 Real-Time Navigation and Obstacle
Avoidance
The drone exhibited proficient autonomous
navigational abilities across diverse environmental
contexts. The ArduPilot framework facilitated
dependable flight regulation, permitting the drone to
sustain stability throughout its operational phases.
The incorporation of ultrasonic sensors markedly
improved the drone's capacity for obstacle detection.
These sensors furnished instantaneous distance
assessments, empowering the drone to identify
proximate objects and modify its trajectory as
necessary.
Figure 9 Visual output from ArduPilot 1.
Figure 10 Visual output from ArduPilot 2.
6.2 Facial Recognition
The integration of facial recognition technology into
Usage of Police Surveillance Drone for Public Safety
175

the drone's operational framework markedly
improved its proficiency in recognizing individuals
instantaneously. The system underwent training
utilizing a comprehensive dataset comprising
identifiable facial images. This functionality is of
paramount importance for applications pertaining to
public safety, as it empowers the drone to swiftly
detect potential threats or individuals in urgent need
6.3 Data Collection and Analysis
The drone's onboard camera successfully captured
high-resolution images and video footage during its
operations. These visual data were processed using
OpenCV for image enhancement and analysis,
allowing for effective monitoring of public spaces.
The integration of machine learning algorithms
enabled the drone to detect suspicious activities in
real-time, providing actionable insights for law
enforcement and emergency responders. The data
collected during test flights will serve as a valuable
resource for refining future models and improving
detection accuracy.
6.4 User Interaction and Application
Functionality
The mobile application developed for user interaction
proved effective in facilitating communication
between individuals in distress and the drone system.
Users reported a positive experience with the app's
interface, which allowed them to easily send alerts
and track the drone's location in real time. The
notification feature indicating "Calling the Drone"
provided reassurance to users during emergencies,
confirming that their request for assistance had been
successfully transmitted
7 CHALLENGES & FUTURE
IMPROVEMENTS
Several challenges were identified during testing the
accuracy of facial recognition decreased in low- light
conditions or when subjects wore accessories that
obscured facial features. Additionally, variations in
environmental factors such as wind speed affected
flight stability during certain operations. Future work
will focus on expanding the dataset used for training
facial recognition algorithms to include diverse
environmental conditions and enhancing navigation
algorithms to improve robustness against external
factors. One major constraint was budget limitations,
which impacted our ability to procure higher-quality
components that could enhance performance and
reliability. With a larger budget, we could have
integrated more advanced sensors, improved
processing units, and better cameras, ultimately
resulting in a more robust drone capable of
overcoming many of the challenges faced during this
project.In future improvements, we plan to invest in
better and more expensive components that can
enhance the drone's capabilities significantly.
Upgrading hardware such as high-resolution cameras,
advanced obstacle detection sensors, and more
powerful processors will not only improve facial
recognition accuracy but also enhance navigation
stability under varying environmental conditions.
8 CONCLUSION
The advancement of the autonomous drone model
designated for public safety signifies a pivotal
progression in the enhancement of emergency
response capabilities and situational awareness frame
work through the amalgamation of sophisticated
technologies, including machine learning algorithms,
real-time data analytics, and high-resolution imaging,
the drone is proficiently equipped to meticulously
monitor diverse environments, discern potential
threats, and assist first responders in critical
scenarios. Its capacity equ- ipped to meticulously
monitor diverse environments, discern potential
threats, and assist first responders in critical
scenarios, navigate complex terrains autonomously
while simultaneously collecting and analyzing data in
real time accentuates its potential as an indispensable
asset for law enforcement and public safety agencies.
The deployment of drones in public safety operations
offers numerous advantages, including rapid
coverage of large areas and the provision of critical
information before personnel arrive on the scene.
This capability not only aids in informed decision-
making but also enhances the safety of responders by
allowing them to assess potentially hazardous
situations from a distance. The versatility of drones
enables their use in various applications, such as
surveillance, search and rescue missions, and
infrastructure assessments, demonstrating their
effectiveness across different public safety scenarios.
The autonomous drone model has the potential to
transform public safety operations by enhancing
situational awareness and improving response times
while minimizing risks to personnel.
ISPES 2024 - International Conference on Intelligent and Sustainable Power and Energy Systems
176

REFERENCES
E. Sanchez, T. Hsu, M. Goodman (2022) - “Autonomous
Drones for Urban Surveillance: A Review”: This paper
reviews the deployment and challenges of using
autonomous drones for urban surveillance, focusing on
their potential for improving security and public safety.
J. Lee, A. Khan, R. Patel (2021) - “Machine Learning
Algorithms for Real-Time Surveillance and Anomaly
Detection in Drones”: This study explores the
application of machine learning algorithms in
enhancing the real-time surveillance and anomaly
detection capabilities of drones.
L. Chen, Y. Li, C. Zheng (2020) - “Facial Recognition and
Surveillance Systems in Law Enforcement: A
Comprehensive Survey”: The paper provides an
extensive survey of facial recognition technologies
used in conjunction with drones for law enforcement
surveillance.
R. Sharma, H. Wei, K. Nair (2023) - “Real-Time
Communication and Data Transmission in Autonomous
Drone Systems”: This research investigates the
methods and technologies used for real-time
communication and data transmission in autonomous
drone systems.
P. Gupta, E. Adams, F. Zheng (2021) -“Advanced Obstacle
Avoidance Techniques for Drones in Urban
Environments”: This paper discusses the development
and implementation of advanced techniques for
obstacle avoidance in drones, particularly in complex
urban settings.
Roggi, G., Meraglia, S., & Lovera, M. (2023) "Leonardo
Drone Contest Autonomous Drone Competition:
Overview, Results, and Lessons Learned from
Politecnico di Milano Team." This paper provides an
overview of an annual competition focused on
autonomous drone design and navigation in GNSS-
denied environments
Usage of Police Surveillance Drone for Public Safety
177
