Multi-Objective Optimization of Prefabricated Component
Transportation-Assembly Co-Scheduling Under Small Assembly Unit
Chunguang Chang
1a
, Shuqin Wang
1,* b
and Yan Dong
2c
1
School of Management, Shenyang Jianzhu University, Shenyang 110168, China
2
Finance Department, PetroChina Liaoning Marketing Company, Shenyang 110031, China
*
Keywords: Prefabricated Components, Collaborative Scheduling, Multi-Skill, Multi-Objective, Hybrid Algorithm.
Abstract: Addressing the schedule and cost problems of prefabricated component (PC) assembly processes due to
unreasonable distribution of PC, the transportation, assembly collaborative scheduling optimization model of
PC was studied. The minimum completion time problem and the waiting cost problem in both transportation
and assembly processes are analyzed, and the problem of large number of skilled workers in PC assembly
process is also studied. A multi-skilled team of workers is used to carry out the assembly process, and a multi-
objective optimization model of time-cost-workload equilibrium is set up in terms of the fairness of the multi-
skilled group's work. Then a hybrid NSGA-II simulated annealing algorithm is designed to solve above model,
and the PC transportation, assembly sequence and multi-skilled team allocation scheme are obtained, which
verifies the effectiveness and practicality of the model and algorithm.
1 INTRODUCTION
Green, environment-friendly assembly building is in
line with the national concept of sustainable
development, however, there is big difference in the
resource allocation of prefabricated component (PC)
transportation, construction and other aspects of
assembly building compared with traditional building
type. Scholars at home and abroad have studied
scheduling optimization model for PC transportation
and assembly, Wang et al. (2023) developed a
resource constrained scheduling model considering
uncertain activity time of assembled buildings. Xiong
et al. (2023) developed an optimization model for the
PC loading combination scheme. Luo et al.
(2023)
studied transportation scheduling problem for
assembly phase. Yin J et al.
(2024) considered
immediate lifting of PC on construction sites. Wang
et al., (2018) integrated worker competence into
prefabrication PC scheduling. Araz et al. (2019) also
consider the multi-skilled nature of workers in off-site
construction. Wang and Wu, (2021) consider the
a
https://orcid.org/0000-0001-8379-7569
b
https://orcid.org/0009-0007-8050-4637
c
https://orcid.org/0009-0000-5342-2889
impact of the skill level of the multi-competent
workers.
K
1
K
2
K
3
Component
loading
Transportation of
components
Component
unloading
J
3
J
2
J
1
Adjustment
reset
Lifting of
components
locate and
place lines
J
4
J
5
J
6
Support
Installation
node
connection
Sleeve
Grouting
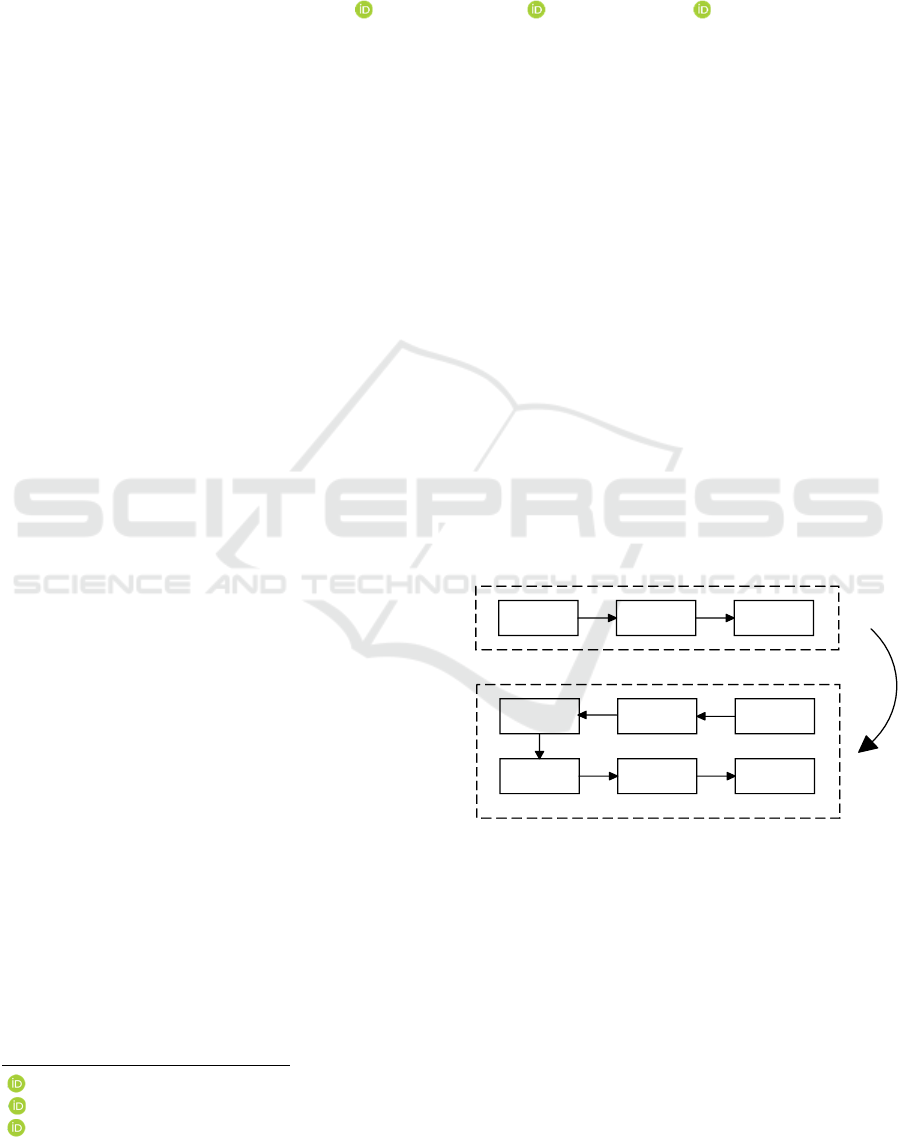
Figure 1: PC transportation-assembly scheduling flowchart.
130
Chang, C., Wang, S., Dong and Y.
Multi-Objective Optimization of Prefabricated Component Transportation-Assembly Co-Scheduling Under Small Assembly Unit.
DOI: 10.5220/0013578800004671
In Proceedings of the 7th International Conference on Environmental Science and Civil Engineering (ICESCE 2024), pages 130-135
ISBN: 978-989-758-764-1; ISSN: 3051-701X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
2 DESCRIPTION OF THE
PROBLEM
PC delivery will affect the duration and cost of the
entire construction process, so the focus is on the
overall transportation and assembly time and the
waiting cost of unloading and lifting the PC according
to the PC assembly process and lifting time
requirements. Meanwhile, multi-skilled teams
consisting of multi-skilled workers to fulfill the field
assembly tasks and consider the fairness of workers'
work. The PC transportation-assembly scheduling
procedures are shown in Figure 1.
3 MATHEMATICAL MODELS
3.1 Symbol Definition
To describe the model clearly, common
parameter and variable symbols and their
definitions are given and listed in Table 1.
Table 1: Common Parameter and Variable Symbols and Definitions.
Symbol Definitions Symbol Definitions
I
PC type number
1, 2,
I
M= ,
M
is the total number
of PC types
()
A
,,
I
ij
P
Actual operating time of procedure
j
for PC
()
,
I
i
during
assembly
i
Single PC number, 1, 2,iN= ,
N
is the total
number of PC
()
0
A
,,
I
ij
P
Initial operating time of procedure
j
for PC
()
,
I
i
during
assembly
k
Procedure number during transportation, 1, 2,kK=
,,ivI
WT
Waiting time for unloading vehicle
v
loaded with PC
i
of
type
I
j
Procedure number during assembly, 1, 2,jJ=
()
,,
I
ij
WL
Waiting time for lifting PC
()
,
I
i
at process
j
during
assembly
v
Transportation vehicle number,
1, 2, ,
I
vV=
,
I
V
is
total number of vehicles loaded with PC type
I
r
Multi-skilled shifts number, 1, 2, ,rR= ,
R
is team
total number
B
Maximum load capacity of transport vehicle
,
j
r
τ
Operating coefficient of a multi-skilled shifts
r
at process
j
during assembly
I
A
Weight of a single member of PC type
I
,,ivI
X
Binary variable for type
I
PC
i
is delivered by vehicle
v
TR
,,ivk
S
Start time of procedure
k
for PC
i
loaded by vehicle
v
during transportation
()
,,,
I
ijr
Y
Binary variable for procedure
j
for PC
()
,
I
i
is performed
by a multi-skilled teams
r
during assembly
()
A
,,
I
ij
S
Start time of procedure
j
for PC
()
,
I
i
during assembly
,
j
r
e
Binary variable for the multi-skilled team
r
has the
capability to complete the procedure
j
during assembly
TR
,,ivk
T
Completion time of procedure
k
for PC
i
loaded by
vehicle
v
during transportation
1
γ
Cost factor for waiting time for unloading
()
A
,,
I
ij
T
Completion time of procedure
j
for PC
()
,
I
i
during
assembly
2
γ
Cost factor for waiting time for lifting of PC
TR
,,ivk
P
Operating time of procedure
k
for PC
i
loaded by
vehicle
v
during transportation
3.2 Modeling
()
A
,,
min
M
NJ
FT= (1)
()
1,,,,2
,,
111 11 1
min
I
V
MN MNJ
ivI ivI
I
ij
Ivi ii j
C X WT WL
γγ
=== == =
=⋅ ⋅ +⋅
(2)
() ()
()
2
A
,,
11 1
2A
,
,, ,,,
1111
1
min
MN J
Ii j
RMNJ
Ii j
jr
Ii j Ii jr
rIij
P
PY e
RR
σ
== =
====
=⋅⋅−
(3)
Multi-Objective Optimization of Prefabricated Component Transportation-Assembly Co-Scheduling Under Small Assembly Unit
131

s.t.
TR TR TR
,, ,, ,,
1,2 , 1,2, , 1,2,
ivk ivk ivk I
TSPi Nv Vk K≥+ = = =
(4)
TR TR
,, ,, 1
max 2, 1,2, , 1,2,
ivk ivk I
STkiNvV
−
≥===
(5)
TR TR
,, ,, 1 ,,
3, 1,2, , 1,2,
ivk ivk ivI I
ST WTki Nv V
−
≥+ == =
(6)
{
}
TR TR
,, ,, 1 , 1,
max , 0 3, 1, 2, , 1, 2, , 1, 2,
ivI ivk iv k I
WT T T k i N v V I M
−−
=− ====
(7)
()
TR TR A
,, ,,
,,
min 3, 2, 1, 2 , 1, 2, , 1, 2,
ivk ivk I
Ii j
SP Skji Nv VI M+≤ === = = (8)
() () () ()
0
A
AA
,,
,, ,, ,, ,,,
1,2, , 1,2 , 1,2 , 1,2,
jr jr
Ii j Ii j Ii j Ii jr
TSP YeI Mi Nj Jr R
τ
≥+⋅⋅ ⋅ = = = =
(9)
() ( ) ()
{
}
AAA
,, , 1, ,, 1
max , 1, 2, , 1, 2 , 1, 2
Ii j Ii j Ii j
STTIMiNjJ
−−
≥===
(10)
() () ( )
{
}
AA
,, ,, , 1,
max ,0 2, 1,2, , 1,2
Ii j Ii j Ii j
WL S T j I M i N
−
=− ===
(11)
()
,
,,,
1, 2, , 1, 2 , 1, 2 , 1, 2,
jr
Ii jr
YeI Mi Nj Jr R≤= = = =
(12)
,,
0 or 1 1,2, , 1,2 , 1,2,
ivI I
XIMiNvV== = =
(13)
()
,,,
0 or 1 1,2, , 1,2 , 1,2
Ii jr
YIMiNjJ== = =
(14)
Equation (1) represents the minimum completion
time required from transportation to assembly. (2)
represents minimum waiting costs for unloading and
lifting of PC, where,
//
II
VNBA=
. (3)
represents the most balanced workload of the multi-
skilled team. (4) to (6) indicate the operating time
constraints for loading PC
i at procedure
k
by vehicle
v
during transportation. (7) and (11) indicate the
waiting time for unloading and lifting of PC,
respectively. (8) indicates PC unloading delivery time
constraints. (9) to (10) indicate the operating time
constraints of PC
()
,Ii
at procedure
j
. (12)
represents the multi-skilled teams assigned during
assembly has the capability to complete the task. (13)
to (14) represent ranges of the variables.
4 ALGORITHM DESIGN
Above problem belongs to NP-hard problem, so
NSGA-II algorithm by Deb et al. (2002) is chosen and
mixed with simulated annealing algorithm. Its flow is
as follows:
Step 1: Coding rules and creating initial
populations, a two-segment chromosome coding
structure is adopted, the first segment is the
transportation phase, including vehicle allocation and
PC scheduling coding based on the transportation
process, and the second segment is the assembly
phase, including multi-skilled shift assignment and
PC scheduling coding based on the assembly process.
Step 2: Calculation of fitness value, in this paper,
we solve for the fitness value based on the fitness
function:
2
fit F C
σ
=
.
Step 3: Genetic operation, sorting and grading the
individuals of the population according to the non-
dominated sorting method, calculating the congestion
distance between chromosomes of the same level,
selecting the parent population using the binary
tournament selection method, and then generating a
new set of chromosomes by transferring some of the
information of the parent to the next generation by
means of crossover and mutation.
Step 4: Simulate the annealing operator search,
accepting the optimal state in the region ensures a
comprehensive search by means of probabilistic
acceptance.
5 MODEL APPLICATION
5.1 Relevant Data Processing
A total of 8 PC exterior walls, 5 interior walls and 11
floor slabs are required in the area. The maximum
load of the transportation trucks used is 16t, with a
total of 5 trucks, and the cost of unloading and lifting
waiting is 10 yuan/h and 60 yuan/h, respectively.
Other relevant data are shown in Table 2, and multi-
skilled team consisting of three multi-skilled workers,
whose operating coefficients are shown in Table 3.
ICESCE 2024 - The International Conference on Environmental Science and Civil Engineering
132
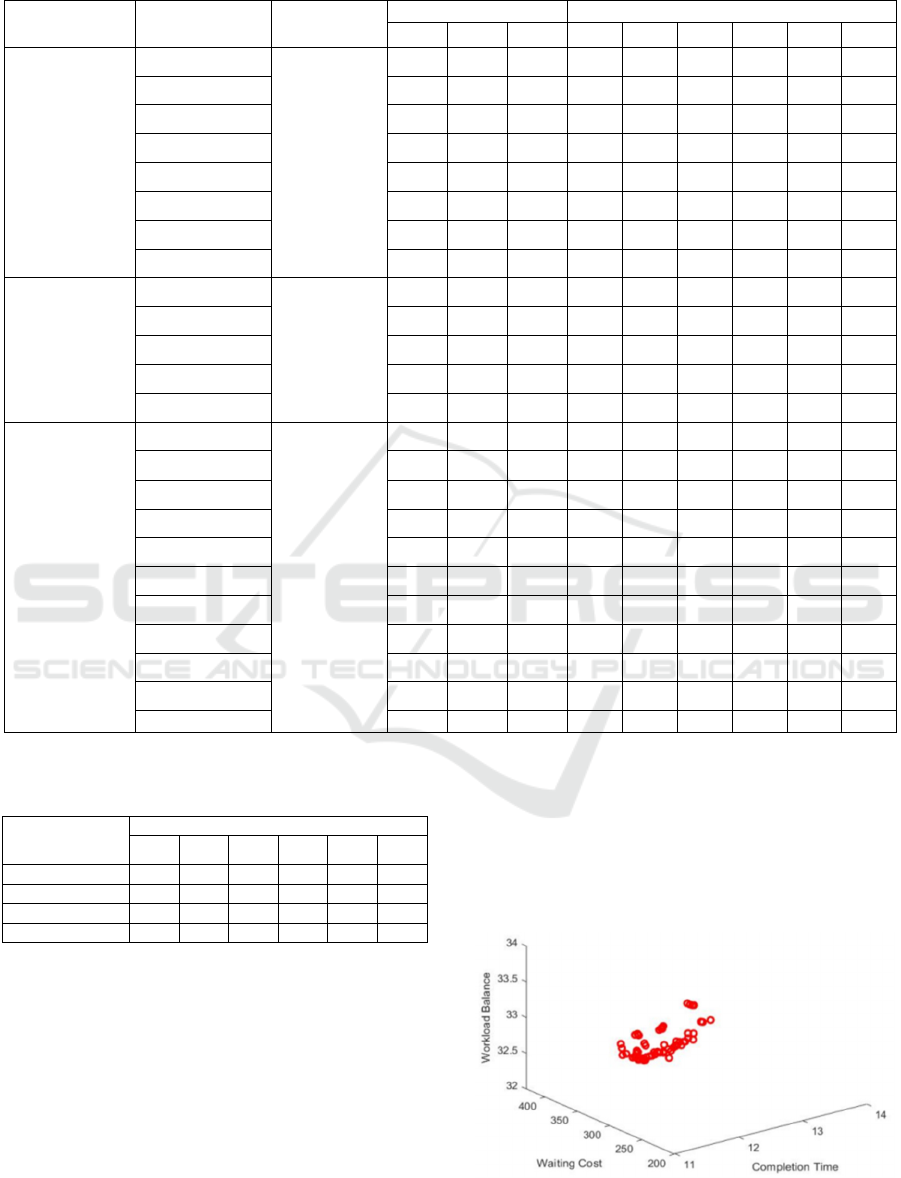
Table 2: Parameters related to PC.
Type of PC PC number
unit weight
(t)
unit of time /min Initial operating time /min
1
K
2
K
3
K
1
J
2
J
3
J
4
J
5
J
6
J
A
1
3.2
4 50 5 12 18 8 12 12 5
2 3 50 4 10 12 6 6 18 3
3 3 50 4 10 12 6 6 18 3
4 2 50 3 13 24 10 12 16 4
5 4 50 5 12 18 8 12 12 5
6 5 50 4 11 16 10 8 18 3
7 3 50 3 12 18 8 12 12 4
8 3 50 3 12 18 8 12 12 4
B
9
3
5 55 4 10 20 10 12 18 12
10 3 55 6 12 18 12 16 24 10
11 6 55 5 13 18 10 18 20 14
12 4 55 6 10 18 8 16 22 12
13 4 55 4 11 24 10 14 20 12
C
14
2.5
3 45 4 10 20 6 18 16 4
15 2 45 3 12 18 4 16 14 4
16 2 45 4 12 6 6 16 12 5
17 3 45 3 11 12 6 18 14 6
18 3 45 3 14 12 4 14 12 5
19 2 45 3 12 18 4 16 14 4
20 3 45 2 12 12 4 16 16 4
21 2 45 2 14 16 6 18 16 2
22 3 45 3 11 12 6 18 14 6
23 3 45 4 10 20 6 18 16 4
24 2 45 3 12 18 4 16 14 4
Table 3: Operational coefficients for multi-skilled teams.
Multi-skilled
teams
Operating coefficient
1
J
2
J
3
J
4
J
5
J
6
J
1 0.88
2 0.95 1.06 1.12 0.97
3 1.06 0.87 0.82
4 0.95 0.83 0.94 1.11
5.2 Analysis of Results
To express simply, above data unit is converted to
hour. The algorithm parameters are set as follows:
population size 80, iteration 500, crossover
probability 0.9, variance probability 0.1, annealing
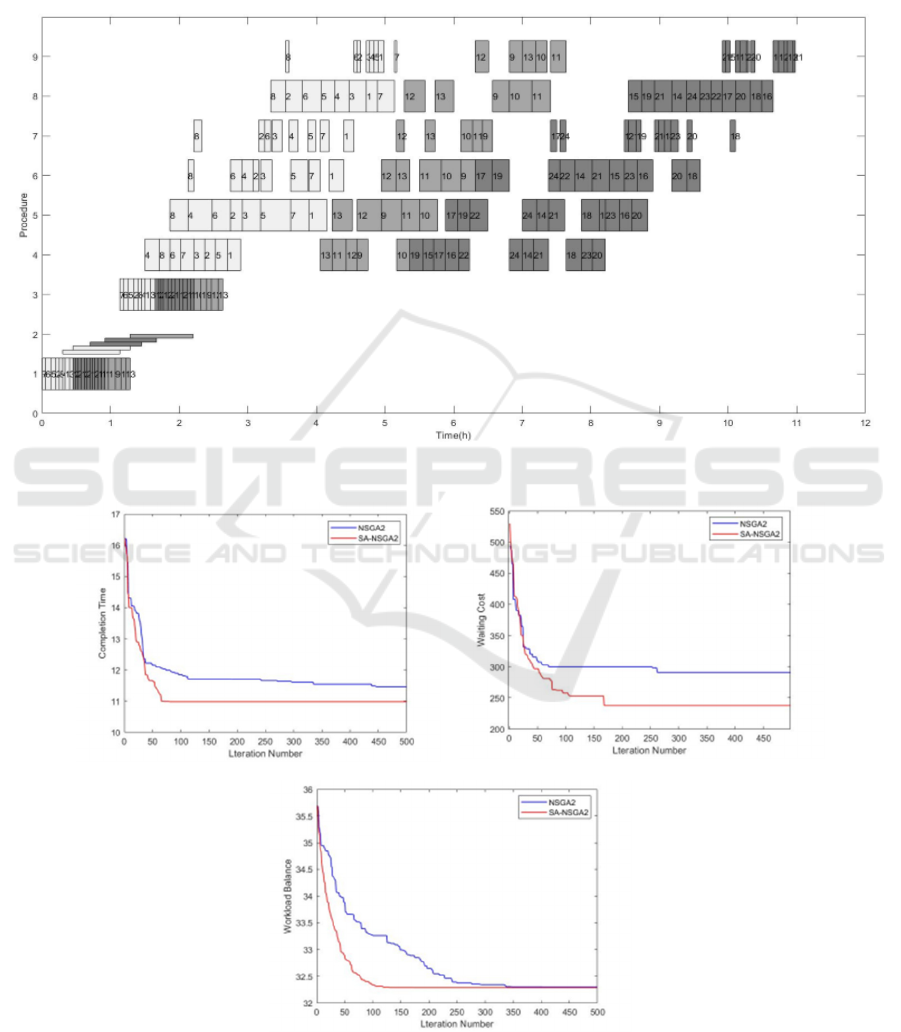
temperature 100, annealing rate 0.96. The results of
the solution are shown in Figure 2. The Gantt chart
for PC is shown in Figure 3, and the corresponding
objective function values are: completion time 11.18
h, waiting cost 272.6 yuan, workload variance 33.18,
and multi-skilled teams in a set of processes
configured in the scheme 2-1-4-3-3-4. To verify the
effectiveness of the hybrid algorithm, the result is
compared with that by NSGA-II algorithm, and the
convergence of the two algorithms is shown in Figure
4.
Figure 2: Three-dimensional Pareto frontier.
Multi-Objective Optimization of Prefabricated Component Transportation-Assembly Co-Scheduling Under Small Assembly Unit
133
6 CONCLUSION
The PC co-scheduling model established in this paper
ensures the immediacy of PC assembly at the
construction site, provides methodological support
for PC co-scheduling and staffing, which is an
important direction for future construction enterprises
to develop into knowledge-based enterprises, and
verifies the effectiveness of the hybrid algorithm by
comparing it with the NSGA-II algorithm.
7-6-5-2-8
4-1-3 15-21-20-14-24-22
10-11-9-12-13
16-19-23-18-17
Figure 3: Gantt chart of the co-scheduling programme.
(
a
)
(
b
)
(c)
Figure 4: Comparison of the convergence of the two algorithms.
ICESCE 2024 - The International Conference on Environmental Science and Civil Engineering
134

ACKNOWLEDGEMENTS
This work is supported by Social Science Planning
Fund project of Liaoning Province (L22BGL041).
REFERENCES
Wang, H., Gong, X., Li, Y. 2023. A Construction
Scheduling Optimization of Prefabricated Buildings
Based on Improved NSGA-II Algorithm. Industrial
Engineering Journal, 26(2): 85
Xiong, F., Cao, J., Zhang, X. 2023. Integrated precast
production scheduling and loading combination with
considering time-varying characteristics of traffic
congestion. Computer Integrated Manufacturing
System, 29(8): 2761
Luo, Q, Deng, Q, Guo, X, et al. 2023. Modelling and
optimization of distributed assembly hybrid flow shop
scheduling problem with transportation resource
scheduling. Computers & Industrial Engineering, 186:
109717
Yin, J, Huang, R, Sun, H, et al. 2024. Multi-objective
optimization for coordinated production and
transportation in prefabricated construction with on-site
lifting requirements. Computers & Industrial
Engineering, 189: 110017
Wang, Z., Hao, H., Gong, J. 2018. Modeling Worker
Competence to Advance Precast Production Scheduling
Optimization. Journal of Construction Engineering and
Management, 144(11): 04018098.
Araz Nasirian, M., et al. 2019. Optimal Work Assignment
to Multiskilled Resources in Prefabricated
Construction. Journal of Construction Engineering and
Management, 145(4).
Wang, Y., Wu, L. 2021. A Research on Multi-project
Multi-skill Human Resource Scheduling Based on
Improved NSGA-II. Industrial Engineering Journal,
24(3): 130
Deb, K., Pratap, A., Agarwal, S., et al. 2002. A fast and
elitist multi objective genetic algorithm: NSGA-II.
Transactions on Evolutionary Computation, 6(2): 182-
197.
Multi-Objective Optimization of Prefabricated Component Transportation-Assembly Co-Scheduling Under Small Assembly Unit
135
