
Comparative Study of ORB-SLAM2 and IR-Based Revolution
Counting with Ultrasonic Obstacle Avoidance for Autonomous
Wheelchair Navigation
Shreyas Anchan
a
, Giriprasath P
b
, Lohith M
c
, Rahul M
d
, Sharath Kumar Y N
e
and Satish B A
f
Department of Electrical and Electronics Engineering, Dayananda Sagar College of Engineering, Kumaraswamy Layout,
Bangalore, Karnataka, India
Keywords: Autonomous, Embedded systems, Navigation, Robotics, Wheelchair.
Abstract: Wheelchairs are crucial to the mobility of people with disabilities. Conventional manual wheelchairs have
come a long way to the powered and smart designs that allow for different types of controls. Nevertheless,
indoor navigation and evasion of obstacles is a challenge to most users, especially to those with disabilities
on powered wheelchairs. With technological advancement, the use of autonomous systems has gotten wider
scope incorporating both external and internal spaces. Moreover, nowadays use of expensive lidars is used
for indoor navigation but that makes the entire wheelchair costly. To reduce the cost use of stereo cameras or
monocular cameras started for indoor mapping. ORB-SLAM2 is an algorithm where VSLAM works using a
monocular camera because of which the cost of the wheelchair manufacture reduces.
1 INTRODUCTION
Wheelchairs have been used by the physically
challenged for movement for many years. The simple
manually operated wheelchairs have in recent years
given way to powered wheelchairs, with various
modes of control. Nowadays, wheelchairs have
features like stair climbing and autonomous
navigation built in the wheelchairs. But the cost of
these wheelchairs is high and not only that these
wheelchairs cannot be transported easily
SLAM has been a field of study for many decades.
From radars and range finders to cameras and lasers,
many modalities of SLAM-finding sensors pose a
global representation. Development of Lidar sensors
made major developments in SLAM-based
localization since these Lidars can give an accurate
measure of the z-axis distance of its surroundings.
a
https://orcid.org/0009-0005-6195-7257
b
https://orcid.org/0009-0005-3119-3524
c
https://orcid.org/0009-0001-8391-7935
d
https://orcid.org/0009-0001-6592-9166
e
https://orcid.org/0000-0002-1066-5773
f
https://orcid.org/0000-0003-4010-0965
There have been many developments in the
algorithms used in SLAM like ORB-SLAM2 and
ORB-SLAM3, Vins-Fusion, DSO (Direct Sparse
Odometry), RTAB-Map and LSD-SLAM, and
Kimera. Nowadays VSLAM (Visual-Inertial SLAM)
has become a major topic of study due to its
applications in robotics, avionics, AR/VR, etc.
In most cases, custom-made wheelchair motors
are used which are quite costly. In many scenarios,
motors that are used in the electric bicycles are
employed but they have a much higher rated rpm than
what is efficient and smooth operation of the
wheelchair requires. As Parik (Parikh et al., 2005)
implemented in the Usability study of a control
framework for an intelligent wheelchair, robotics to a
wheelchair. The study's objective is to combine three
approaches to motion control to evaluate the
usefulness and efficacy of three paradigms, namely,
deliberative plans, local reactive behaviors, and
Anchan, S., P, G., M, L., M, R., Y N, S. K. and B A, S.
Comparative Study of ORB-SLAM2 and IR-Based Revolution Counting with Ultrasonic Obstacle Avoidance for Autonomous Wheelchair Navigation.
DOI: 10.5220/0013575300004639
In Proceedings of the 2nd Inter national Conference on Intelligent and Sustainable Power and Energy Systems (ISPES 2024), pages 35-39
ISBN: 978-989-758-756-6
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
35

human inputs. The wheelchair is self-operating, that
is it goes to any given destination on its own. The
navigation system utilizes lasers to determine the
direction by locating certain landmarks. To detect
obstacles, IR proximity sensors are used and the
wheelchair will then bypass the obstacles using
reactive controllers. The wheelchair also has an
override control which allows the user to operate it
via a joystick and manually directs it to any other
point. Research by U. Masud. (Masud et al., 2017)
presents a vision-based control of a wheelchair,
allowing the users to have complete control of the
movement of the wheelchair using their eyes. This
allows users even with multiple disabilities to control
the wheelchair independently with no assistance from
anyone. As per research by Shahnaz et al (Mur-Artal
and Tardós, 2017). (2017) a low-cost smart electric
wheelchair that incorporates destination mapping and
intelligent control features. This study emphasizes the
importance of cost-effectiveness in design while
maintaining functionality. The wheelchair is
equipped with microcontrollers for autonomous
navigation, obstacle detection, and slope
management. The study demonstrates how smart
technology can be leveraged to improve wheelchair
accessibility and usability, particularly for users in
low-resource settings. there are plenty of ways to
make this wheelchair autonomous. In this paper, we
have used Orb_Slam2 (Oriented Fast and Rotated
Brief SLAM 2) which is a widely used open-source
simultaneous localization and mapping (SLAM)
system.
It enables real-time tracking, mapping, and
relocalization using monocular, stereo, or RGB-D
cameras. ORB-SLAM2 uses ORB features for
keypoint detection and description, making it
computationally efficient while maintaining accuracy.
In the paper (Mur-Artal et al., 2015) "ORB-SLAM2,"
the authors presented an improved SLAM system
capable of operating with monocular, stereo, and
RGB-D cameras. The system provides real-time
tracking, mapping, and relocalization functionalities,
leveraging ORB features for efficiency and
robustness. It introduces stereo and RGB-D support
while improving the loop-closing and relocalization
capabilities of its predecessor, ORB-SLAM. The
framework is versatile and suitable for robotics and
augmented reality applications, offering open-source
access for broader adoption and further research. In
the paper (Wolf, 2003) "ORB-SLAM," the authors
introduced a versatile and accurate SLAM system
designed for monocular cameras.
It provides real-time tracking, mapping, and
relocalization capabilities using ORB features for
efficiency. The system includes a robust loop-closing
mechanism to detect previously visited locations and
an effective map-recovery method for relocalization
after tracking loss. Its computational efficiency and
accuracy make it suitable for robotics and augmented
reality applications, and the open-source availability
facilitates broader adoption and innovation.
There are plenty of ways of controlling
wheelchairs other than joystick. Erik Jason Wolf
(Chieein et al., 2009) investigates the effects of
whole-body vibration on users of electric-powered
wheelchairs. The study evaluates wheelchair designs
and user exposure to vibrations, aiming to improve
comfort, safety, and health outcomes. The research
highlights the importance of biomechanical and
ergonomic considerations in wheelchair development
2 PROPOSED METHOD
Wheelchairs, when used for indoor navigation, have
to be very precise in identifying the objects around
them as an indoor setup might have multiple obstacles
at closer distances. So, we used orb-slam2 which
creates an indoor map of the surroundings with a
monocular camera in real time as navigation occurs,
and visual odometry for accurate motion within
intricate outdoor settings. This will improve mobility,
and assist users in overcoming difficult environments.
2.1 ORB SLAM 2
The autonomous navigation feature of the retrofittable
electric smart wheels utilizes ORB-SLAM2 (Oriented
FAST and Rotated BRIEF SLAM 2) for real-time
mapping and localization. ORB-SLAM2 uses ORB
features to track key points in the environment,
creating a map while maintaining accurate localization
even in dynamic settings. It is capable of loop closure
detection, which allows the wheelchair to recognize
previously visited locations and correct drift in its
map, making navigation more reliable. This system
enables autonomous movement without relying on
GPS, ideal for complex, outdoor environments.
2.2 Object Detection
Employing the use of InfraRed (IR) and ultrasonic
sensors: IR sensors detect objects by sending out an
IR wave from their transmitter and waiting for the
reflection back. These sensors are inexpensive and
assure good close-range object detection. Four IR
sensors were mounted on the wheelchair; two on the
handles and the other set near the wheels, to ensure
ISPES 2024 - International Conference on Intelligent and Sustainable Power and Energy Systems
36
that all the possible directions in which the
wheelchair is moving are scanned for any obstacles.
The signals from these sensors were however picked
up by the control unit to detect any obstruction in the
path of the wheelchair.
A drawback however of IR sensors is that they
cannot provide any information concerning the
distance of the detected object.
3 METHOD
3.1 SLAM Navigation with
ORB-SLAM 2
The system design for the customizable electric smart
wheelchair is detailed in Figure 3. The wheelchair is
mounted with a battery and a controller while the
computational activities are executed by a Jetson
Nano which runs the ORB-SLAM2 algorithm for
mapping and localizing the environment. There is a
wireless communication link between the Jetson and
the controller where the Jetson is used to control the
wheels' motion. A camera fixed on the Jetson device
provides the depth information that is transformed
into a point cloud. This form of data is paired with
Visual SLAM (VSLAM) techniques that allow the
wheels to navigate on their own without any usage of
GPS regardless of the mating surfaces.
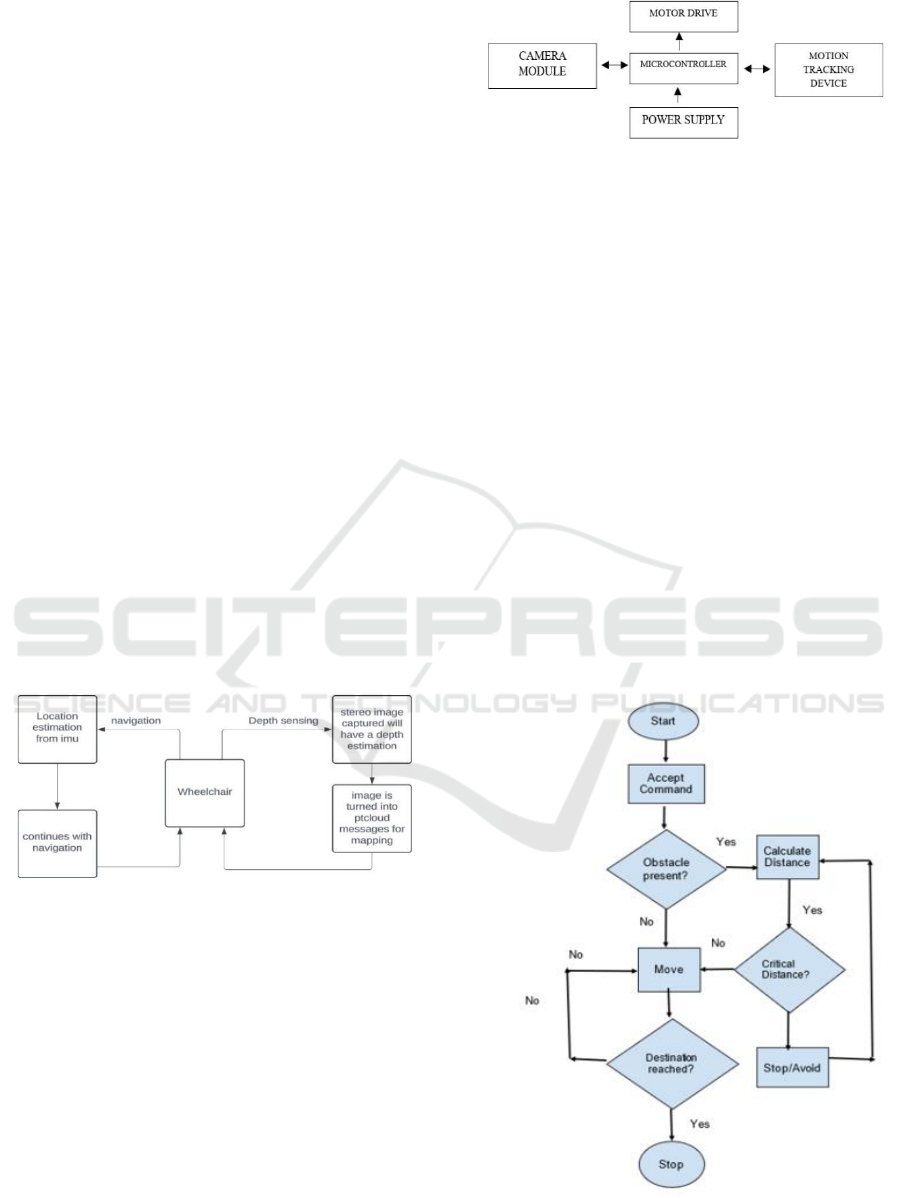
Figure 1: Block diagram of SLAM-based navigation.
Figure 3. illustrates the block diagram of the
wheelchair system. The wheelchair is integrated with
a battery, BLDC motor, and motor controller that
drives the movement. The Jetson Nano serves as the
main control unit, responsible for processing data
from the camera and running the ORB-SLAM2
algorithm for autonomous navigation. A joystick is
connected to the Jetson for manual control, allowing
the user to override the autonomous system if needed.
Communication between the ESP32 motor
controllers is established via the ESP-NOW protocol,
providing efficient and low-latency wireless data
transfer for smooth coordination of the system
components
Figure 2: Block diagram of wheelchair.
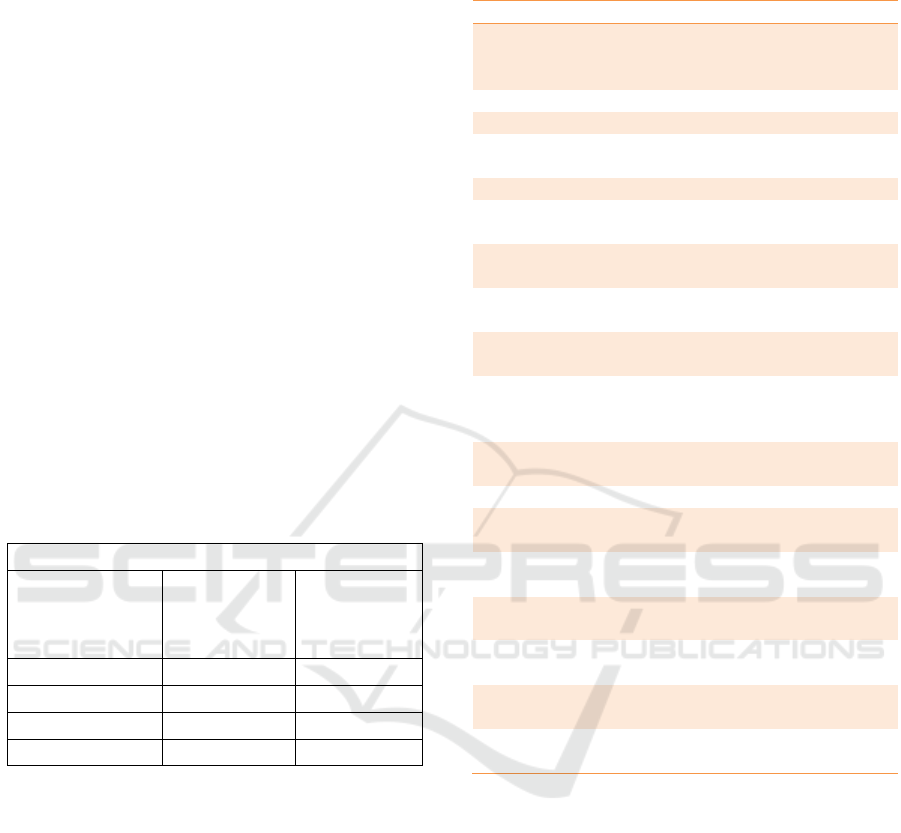
3.2 Obstacle Avoidance Using IR
Sensor
The wheelchair comes with an ultrasonic sensor to
help identify obstacles and provide a safe way to
navigate. The sensor is always active, sweeping in
front of the wheelchair and perceptive to any objects
and barriers within the path. In case an obstacle is
sensed, the wheelchair automatically freezes and no
further motion of the machine is allowed, thus averting
all manner of accidents. The wheelchair stays in that
position until such a time the obstruction has been
removed or that a clear sunlit path is established and
then it continues moving without any delays.
The navigation system follows a set path that has
already been programmed. The wheelchair is
controlled, and the ultrasonic sensor scans for
obstacles as the wheelchair travels along the pre-
programmed path. This way, the wheelchair enables
safe and effective mobility indoors or within any
structured space making it comfortable for the users.
Ultrasonic sensors act as a safety measure for the
Figure 3: Working of the wheelchair with IR sensor.
Comparative Study of ORB-SLAM2 and IR-Based Revolution Counting with Ultrasonic Obstacle Avoidance for Autonomous Wheelchair
Navigation
37
system since they facilitate the detection and
avoidance of obstacles in real-time. This makes the
system applicable in environments where obstacles
may not be static and could come at any moment
4 RESULTS
In the paper, the authors use the KITTI dataset to
compare an IR- and ultrasonic-based system with a
stereo camera system in terms of timing and
navigation. Tracking-related tasks like ORB
extraction were slower using the stereo system than
compared to the IR and ultrasonic-based system,
~10.0 ± 5.0 ms compared to 24.83 ± 8.28 ms, pose
prediction ~3.0 ± 2.0 ms compared to 2.36 ± 1.84 ms
ascribed to the lesser number of features used, thus
lesser computational complexity. However, in the
case of mapping processes, that required slightly
more time: Local BA (~80.0 ± 40.0 ms vs. 69.29 ±
61.88 ms), and also Map Point Creation (~50.0 ± 20.0
ms vs. 47.69 ± 29.52 ms), since the involved working
with IR and ultrasonic data.
Table 1: Performance on the distance of navigation.
Performance on distance of navigation
Distance to be
navigated (m)
Navigation
accuracy
with ir (%)
Navigation
accuracy
with camera
(%)
> 10
85
90
5 to 10
92
94
2.5 to 5
95
95
2.5 to 1.5
98
97
Accuracy of navigation IR system The IR system
was less accurate at higher ranges (>10 m: 85% vs.
90%) but comparable for nearer ranges (2.5 to 5 m:
95%; 2.5 to 1.5 m: 98%). These results indicate that
though IR and ultrasonic systems can be excellent for
reasonable performance, the mapping capabilities and
long-range navigation accuracy are lagging behind
the stereo camera systems; it is very much important
to select the correct sensor system according to the
requirement of the application.
Table 2: Timing results comparison of each thread in ORB
SLAM 2 System to IR and Ultrasonic based System.
Settings
Dataset
KITTI
KITTI2
Sensor
Stereo
Camera
IR and
Ultra-
Sonic
Resolution
1226 × 370
X
Camera FPS
10 Hz
X
ORB
Features
2000
X
Tracking
ORB
Extraction
24.83 ±
8.28
~10.0 ± 5.0
Stereo
Matching
15.51 ±
4.12
X
Pose
Prediction
2.36 ± 1.84
~3.0 ± 2.0
Local Map
Tracking
5.38 ± 3.52
~6.0 ± 4.0
New
Keyframe
Decision
1.91 ± 1.06
~2.5 ± 1.0
Total Time
49.47 ±
12.10
~21.5 ± 9.0
Mapping
Keyframe
Insertion
X
~1.0 ± 0.5
Map Point
Culling
0.45 ± 0.38
~0.6 ± 0.4
Map Point
Creation
47.69 ±
29.52
~50.0 ±
20.0
Local BA
69.29 ±
61.88
~80.0 ±
40.0
Keyframe
Culling
0.99 ± 0.92
~1.5 ± 0.8
Total
129.52 ±
88.52
~133.0 ±
70.0
5 CONCLUSIONS
In conclusion, this research presents a promising
solution for enhancing wheelchair mobility. By
integrating autonomous navigation via ORB-SLAM,
the system offers both manual and autonomous
control to users, improving accessibility and
independence, particularly in outdoor environments.
The use of ESP32 communication for motor control
and depth-sensing cameras for navigation ensures
both reliability and precision. This adaptable system
not only addresses the limitations of existing
wheelchairs but also offers an affordable, scalable
solution for users in resource-constrained areas.
Future work will focus on refining the system’s
ISPES 2024 - International Conference on Intelligent and Sustainable Power and Energy Systems
38

robustness and expanding its capabilities for broader
applications.
REFERENCES
Sharafutdinov, D., Griguletskii, M., Kopanev, P., et al.
(2023). Comparison of modern open-source Visual
SLAM approaches. Journal of Intelligent & Robotic
Systems, 107(43). https://doi.org/10.1007/s10846-023-
01812-7
Merzlyakov, A., & Macenski, S. (n.d.). A comparison of
modern general-purpose Visual SLAM approaches.
Samsung Research.
Parikh, S. P., Grassi Jr., V., Kumar, V., & Okamoto Jr., J.
(2005). Usability study of a control framework for an
intelligent wheelchair. In Proceedings of the IEEE
International Conference on Robotics and Automation
(pp. 4745–4750). https://doi.org/1570853
Lim, A. R. G., Rabacca, J. C. D., Valdez, E., Sybingco, E.,
Sapang, O., Roque, M. A., & Gustilo, R. (n.d.). Wi-Fi
indoor navigation system controlled automated
wheelchair. Department of Electronics and
Communications Engineering, De La Salle University-
Manila.
Masud, U., Almolhis, N., Alhazmi, A., Ramakrishnan, J.,
Islam, F. U., & Farooqi, A. R. (2024). Smart wheelchair
controlled through a vision-based autonomous system.
IEEE Access, 12, 65099–65116.
https://doi.org/10.1109/ACCESS.2024.33956
Shahnaz, C., Maksud, A., Fattah, S. A., & Chowdhury,
S. S. (2017). Low-cost smart electric wheelchair with
destination mapping and intelligent control features. In
Proceedings of the IEEE International Symposium on
Technology and Society (ISTAS), Sydney, NSW,
Australia (pp. 1–6).
https://doi.org/10.1109/ISTAS.2017.8318978
Mur-Artal, R., & Tardós, J. D. (2017). ORB-SLAM2: An
open-source SLAM system for monocular, stereo, and
RGB-D cameras. IEEE Transactions on Robotics,
33(5), 1255–1262.
https://doi.org/10.1109/TRO.2017.2705103
Mur-Artal, R., Montiel, J. M. M., & Tardós, J. D. (2015).
ORB-SLAM: A versatile and accurate monocular
SLAM system. IEEE Transactions on
Robotics,31(5),1147–1163.
https://doi.org/10.1109/TRO.2015.2463671
Wolf, E. J. (2003). Evaluation of electric powered
wheelchairs and exposure to whole-body vibration
(Doctoral dissertation, University of Pittsburgh).
University of Pittsburgh ETD collection.
Cheein, F. A., De La Cruz, C., Carelli, R., & Bastos-Filho,
T. F. (2009). Solution to a door crossing problem for an
autonomous wheelchair. In Proceedings of the
IEEE/RSJ International Conference on Intelligent
Robots and Systems (pp. 4931–4936).
https://doi.org/10.1109/IROS.2009.5354292
Mandel, C., Luth, T., Laue, T., Rofer, T., Graser, A., &
Krieg-Bruckner, B. (2009). Navigating a smart
wheelchair with a brain-computer interface interpreting
steady-state visual evoked potentials. In Proceedings of
the IEEE International Conference on Robotics and
Automation (pp. 1118–1125).
https://doi.org/10.1109/ICRA.2009.5152429
Iturrate, I., Antelis, J., & Minguez, J. (2009). Synchronous
EEG brain-actuated wheelchair with automated
navigation. In Proceedings of the IEEE International
Conference on Robotics and Automation(pp.2318–
2325). https://doi.org/10.1109/ICRA.2009.5152679
Morales, Y., Kallakuri, N., Shinozawa, K., Miyashita, T., &
Hagita, N. (2013). Human-comfortable navigation for
an autonomous robotic wheelchair. In Proceedings of
the IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS 2013) (pp. 2737–2743).
https://doi.org/10.1109/IROS.2013.6696691
Tanaka, H., Sumi, Y., & Matsumoto, Y. (2012). A visual
marker for precise pose estimation based on lenticular
lenses. In Proceedings of the IEEE International
Conference on Robotics and Automation(pp.5222–
5227). https://doi.org/10.1109/ICRA.2012.6224736
Tanaka, H., Sumi, Y., & Matsumoto, Y. (2012). A high-
accuracy visual marker based on a microlens array. In
Proceedings of the IEEE/RSJ International Conference
on Intelligent Robots and Systems (pp. 4192–4197).
https://doi.org/10.1109/IROS.2012.6385917
Mur-Artal, R., & Tardós, J. D. (2017). ORB-SLAM2: An
open-source SLAM system for monocular, stereo, and
RGB-D cameras. IEEE Transactions on Robotics,
33(5), 1255–1262.
https://doi.org/10.1109/TRO.2017.2705103
Comparative Study of ORB-SLAM2 and IR-Based Revolution Counting with Ultrasonic Obstacle Avoidance for Autonomous Wheelchair
Navigation
39
