
Ecobot: Autonomous Trash Collection and Segregation System
Harshitha M
a
, Madhurithu T
b
, Mohamed Yousuf
c
, Nikhilesh Singh
d
and Deekshitha Arasa
e
Department of Electrical and Electronics, Dayananda Sagar College of Engineering, Kumaraswamy Layout,
Bengaluru, Karnataka, India
Keywords: Autonomous Garbage Collector, Trash Collector, Trash Segregator, Machine Learning, Sustainable Waste
Management.
Abstract: The rapid growth of urbanization, economic development and population has led to a significant global
garbage crisis, causing severe environmental and health issues. Traditional waste management systems
struggle to manage the increasing volume of waste effectively. This paper presents an innovative solution; an
autonomous trash collection and segregation system designed to operate within defined areas. Utilizing
robotics and machine learning, the system is built around a Raspberry Pi to navigate autonomously, collect
garbage and segregate waste efficiently. This system aims to enhance the sustainability and efficiency of
waste management practices, aligning with global efforts towards smart cities and technology-driven
improvement in quality of life.
1 INTRODUCTION
The exponential increase in waste generation due to
technological advancements and changing lifestyles
has created a pressing need for efficient waste
management systems. Ineffective waste disposal
contributes to environmental pollution and health
hazards. Existing solutions, such as trash segregators
and collectors with predefined navigation, address the
problem partially but often lack the ability to integrate
collection and segregation seamlessly. To bridge
these gaps, we propose an autonomous garbage
collection and segregation system designed to operate
in predefined areas such as indoor floors, pathways,
and other controlled environments. This system
leverages modern technology to collect and segregate
trash efficiently, providing a sustainable solution to
an age-old problem and supporting smart waste
management initiatives.
a
https://orcid.org/0009-0001-8719-1094
b
https://orcid.org/0009-0005-4741-1258
c
https://orcid.org/0009-0008-2828-1728
d
https://orcid.org/0009-0009-0759-1345
e
https://orcid.org/0009-0009-9197-396X
2 LITERATURE SURVEY
The paper (Sengupta et al., 2019) proposes an
autonomous system whose navigation can be
controlled by the regional corporate office through a
website or an application. The robot identifies the
filled trash bins, lifts it, empties the bin and replaces
a new bin in the spot.
The paper (Bharathi et al., 2018) explains how the
authors build a trash collecting robot. The robot first
detects for an object during its run using sonar. The
picture of object is then captured for detection as a
trash or not with DNN algorithm. The object detected
as trash is picked up and dropped into bin.
The paper (Jinquiang et al., 2018) presents
another method of trash collecting set-up. The object
detection is done using ultrasonic sensor. The image
captured by pi-cam is sent to server via TCP/IP
protocol, being a client. The server uses Fast ANN
algorithm to classify the object as a garbage or not,
and according the robot picks it, else follows the path.
M, H., T, M., Yousuf, M., Singh, N. and Arasa, D.
Ecobot: Autonomous Trash Collection and Segregation System.
DOI: 10.5220/0013575200004639
In Proceedings of the 2nd International Conference on Intelligent and Sustainable Power and Energy Systems (ISPES 2024), pages 29-34
ISBN: 978-989-758-756-6
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
29

The paper (Parashar and Tomar, 2018) has a
moving bin that takes a pre- defined path and stops at
every house bin. They use RFID technology for
communication. If house bin is detected full through
ultrasonic sensor, its opening mechanism puts out the
trash into moving bin, else moving bin moves
forward. The paper (R and V, 2018) uses a GPS,
vehicle odometer and IMU sensor for robot location
status. The path-planning, image-processing and
obstacle detection are all performed by CPU. Trash
classification is done by GPU. CPU controlled
manipulator picks the trash and driver controls
motors. The paper (D et al., 2018) has a moving bin
that collects the garbage from the house bins notified
by IR sensor in the house bin. Both bins communicate
through RF signal, controlled by Arduino. The
moving bin moves on pre- defined path; it collects the
trash and dumps it to the dumping station. In the paper
(Varuneshreddy and Nikhil, 2018), the robot is a trash
can-collecting system that takes a designated path.
The robot differentiates a can when its breadth is
found less than specified breadth using IR sensor. The
2-DOF arm picks the trash and dumps it in the bed.
The paper (Ulu and Radha, 2017) gives the
information about a trash collector designed for
beaches. It uses an IP camera for object detection with
PIC.
3 PROPOSED FORMULATIONS
The existing situation of waste management is
lagging behind in consideration to the amount of
waste generated. Moreover, the involvement of
workers in the garbage collection, transportation and
other operations increase the rate of risking their
health. There also exists another drawback that, the
waste at places with untidy environment cannot be
cleaned by creating threat to human health. The post
operations in garbage management, segregation is
also a tough task without proper co-ordination and
response from individuals. Therefore, it is now
important to include and expand the technological
factors in the matter of waste management in all
aspects, along with addressing the issues.
3.1 Garbage Detection
The system is structured in such a way that the camera
locates the trash on its way of navigation. This task is
performed with the help of ML algorithm and image
processing, by classifying objects and trash on the
path.
3.2 Garbage Collection
The system on identifying trash on path, it moves
towards the trash and picks it up using a robotic arm.
3.3 Garbage Segregation
The same system while capturing the frame of trash,
uses the algorithm and image processing technique to
decide whether the trash detected is biodegradable or
non-biodegradable. The arm accordingly makes its
movement and drops the trash into the respective
trash bin.
3.4 Autonomous Navigation
The robot is capable of making self - navigation
movement with the help of GPS (Global Positioning
System) and magnetometer on most of the hard land
regions with single initial positioning definition and
no human intervention.
4 METHODOLOGY
The Raspberry Pi (Raspberry Pi 4 Model B)
microcontroller is the main task controller for the
whole system. The system first starts its movement
from the initial position set with help of GPS. The
robot then continues its motion in the forward
direction with help of GPS and magnetometer. The
system ensures to avoid obstacles using ultrasonic
sensors placed in front. The model continues its
motion otherwise. All the movements of the robot are
assisted by the Steering and DC motors. The model
on its way of motion, examines for any kind of object
nearby using the Pi- Camera. If an object is detected,
the Pi-Camera sends the image to the Raspberry-Pi.
The ML algorithm of trash identification available on
the microcontroller checks for whether the object
detected is a trash or not. If the object is found to be a
trash. The algorithm further performs classification to
recognize whether the trash is a biodegradable or non-
biodegradable one. These inputs from Pi-Camera can
be sorted as trash identification data and trash
categorization data. The Raspberry Pi uses the data of
trash identification data to decide the motion of the
robot towards trash.
ISPES 2024 - International Conference on Intelligent and Sustainable Power and Energy Systems
30
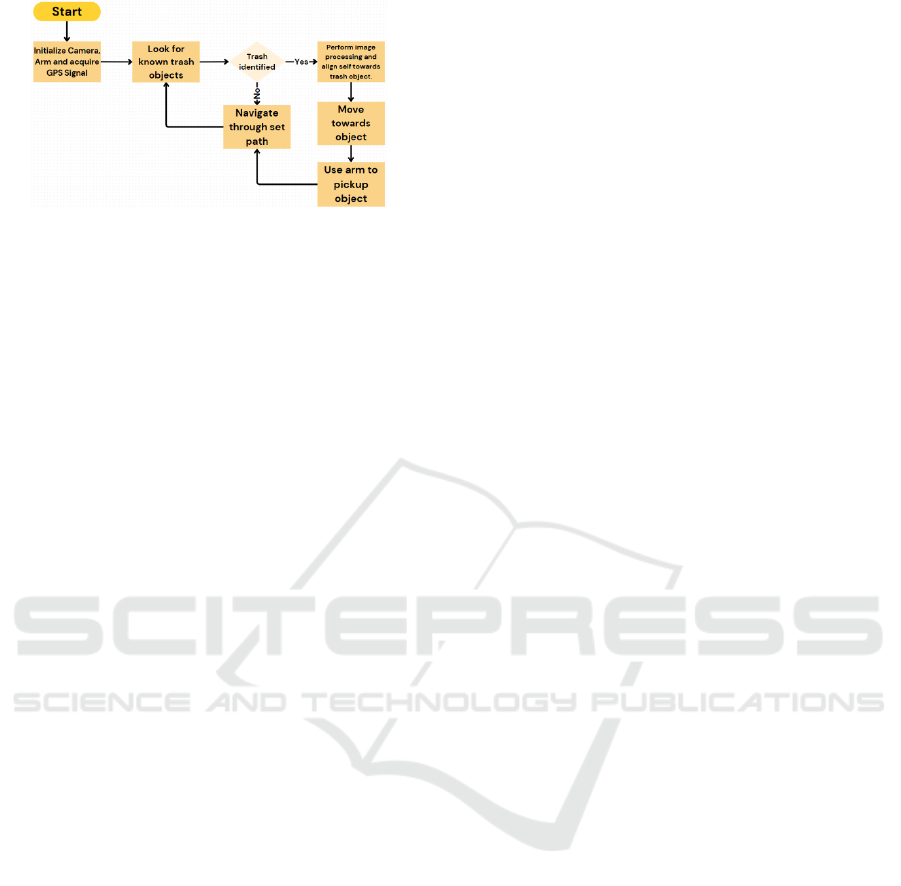
Figure 1: Flowchart of working.
The model makes turn in order to place the trash
image to the center of the frame of the Camera and
then moves towards trash and stops at a certain
distance from the trash.
The trash categorization data determines the arm
movement. The arm picks the trash and makes a left
or right turn in the backward direction to drop the
garbage into respective bin. The robot then comes
back to its position from where the trash was detected
and makes its forward movement. If the object
detected is not found to be garbage, the model moves
on the region for frontward motion.
The robot makes turns with the data input from
GPS and magnetometer. So, to sum it up the 12v
battery is the main powering unit for all the
components in the system. The 12v is stepped down
to 5v to power the raspberry pi and servo motors used
for various applications. The GPS module and
magnetometer supplied navigation of the system.
They provide the input data to the raspberry pi
directly based on which decisions for movement are
taken.
The pi camera provides the images of the
surrounding objects for trash identification. This task
is done with the help of the ML model developed.
Based on all these inputs the raspberry pi provides the
instructions to the motor driver and the arm serves
according to which DC motors and arm performs
their operation of motion and object picking.
4.1 Circuit Description
The complete system is programmed using the python
programming language. The Raspberry Pi (Raspberry
Pi) is powered from the battery via a buck converter
(XL4015) with 5V. The antenna affixed GPS module
is connected to the microcontroller through Vcc-5V,
Gnd-Gnd, Tx - Digital pin, Rx - Digital pin (GPS-
Raspberry Pi). The module uses UART
communication to feed the data into PC; that it
received via RF signals. The magnetometer uses I2C
protocol for communication with the Raspberry Pi
4B.
The obstacle detection component ultrasonic
sensor uses the Trig and Echo pin to share data
accordingly with Raspberry Pi. The Pi- Camera
shares the data using CSI (Camera Serial Interface)
with Raspberry Pi. The connection includes the plug
in of the 15- pin ribbon cable to the CSI port of
Raspberry Pi.
Ultrasonic sensor is also used for object detection.
The picking mechanism of the system includes
robotic arm which is directly controlled by Raspberry
Pi data signals. The rotation of the servos in the arm
decides the arm motion. The decision of the rotations
is made concurrently by the Raspberry.
The servos are powered with 5V via buck
converter (XL4015). The movement managing
system includes 12V DC motors which are driven
through L298N DC motor driver. The driver is
powered directly. The model movement is controlled
by the Ackermann steering as well. The MG995 servo
motor of the steering receives the signal from
Raspberry Pi. The ML algorithm provides the
assistance for trash detection and segregation.
5 WORKING OF MODEL
The above image gives the flow chart for the
algorithm based on which the ML model used in the
system is developed. This flow chart explains the
method of navigation and trash collection performed
by the system. The robot is powered up for its start.
This enables the arm, camera and the navigation
system. The initial position of the system is noted
with the help of the GPS module (via RF signal). The
robot makes its movement for detection of trash.
If the trash is identified the robot aligns itself to
bring the trash to its center frame and moves towards
the trash. The robotic arm then picks up the trash and
drops it into the respective bin. The system comes
back to its position and moves along the set path
continuing the trash detection task. If the trash is not
detected by the robot, it would continue its motion on
the set path for performing the trash detection task.
The whole system working can be divided into
different parts:
(i) Control Unit
The whole system is controlled with the
Raspberry Pi 4B model. The microcontroller
performs all the tasks of data collection, data
analyzation decision making and motion control of
Ecobot: Autonomous Trash Collection and Segregation System
31
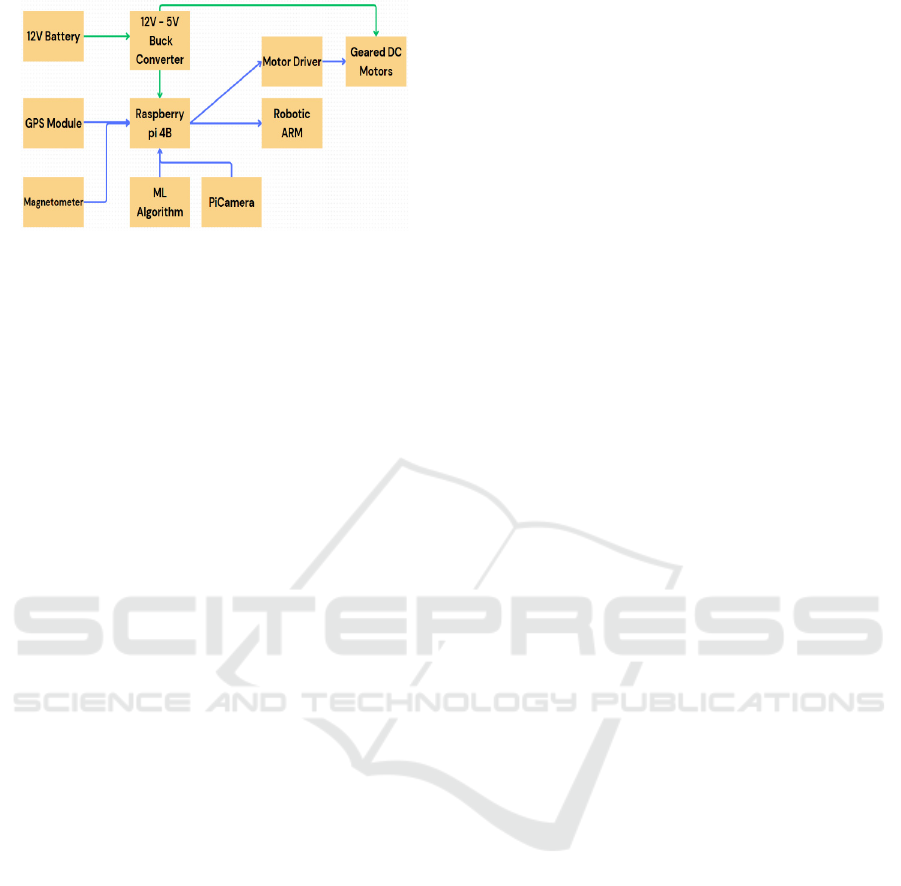
Figure 2: Block Diagram of Circuit.
the robot. It also controls the movement of the arm
picking mechanism.
(ii) Powering Unit
The system is powered by a 12V 4.5Ah Sealed-
Lead Acid rechargeable battery. The step down of the
voltage is done from 12 – 5V for powering the
Raspberry Pi and robotic arm using XL4015 5A DC-
DC Step Down Adjustable buck converter. The
motors driver of wheel motors is powered with 12V
directly from the battery.
(iii) Navigation Module
This arrangement includes Neo 6M GPS module,
HMC5883l magnetometer along with Raspberry Pi.
Predetermined path set up using waypoints. The robot
starts at its initial location, acquires its current
location using GPS module and calculates the angle
it needs to travel for the next waypoint. Then turns
itself in the required direction and moves forward.
The HMC5883L magnetometer module is used for
the accurate directions with respect to earth’s
magnetic field.
(iv) Steering mechanism and motion control
The movement of the system is aided by two 12V
DC motors and the Ackermann steering technique.
The motors are of rating with 100 rpm which are
driven by L298N DC motor driver. The turns made
by the model is controlled through the steering. An
MG995 servo motor is used for steering movement.
(v) Obstacle Detection
The obstacle detection is done using two
ultrasonic sensors placed at the front ends of the robot
on either of its sides. A signal indicating the obstacle
detection commands the steering turns through
Raspberry Pi.
(vi) Trash detection
This process is encountered by Pi-Camera along
with ultrasonic sensor and Raspberry Pi. The camera
reads images 640x480 pixels. This image is first pre-
processed to bring out tinier details of the image and
then given to a customer thrash detection model. The
model returns category name and a bounding box
around the trash object the trash is identified.
(vii) Picking mechanism
The trash picking function is performed by the
robotic arm and directed by the Raspberry Pi. The
arm has four joints with 5-DOF motion. It consists of
three MG995 and three SG90 servo motors.
(viii) Trash segregation technique.
The hardware required for this task is Pi- Camera
and Raspberry Pi Supervised by the ML algorithm.
The ML model can make segregations between
biodegradable and non-biodegradable garbage. Once
the model returns the category name, the result if
more than a threshold then it is classified into
respective category.
(ix) Model Training
The model used for detecting and segregating
trash was trained by retraining a pre-trained model.
Retraining machine learning models is the process of
updating a pre-trained model with new data or
adapting it to new conditions. This process ensures
that the model stays accurate, relevant, and performs
well in changing environments. Around 500 images
of each class were clicked in different backgrounds
and lighting conditions. The images were labelled and
arranged in the COCO dataset format.
The model architecture chosen for retraining was
MobileNet-V2 which is a Convolutional Neural
Network by Google designed to run on low-end
devices. It is commonly used for tasks like image
classification and object detection on mobile and
other edge devices.
The hyperparameters set for the training process
were input size of 256x256 pixels, a learning rate of
0.3, batch size of 8 and a total of 30 epochs. The
training was done on Google collab server using a
Nvidia T4 GPU runtime. The post training evaluation
results were obtained as validation loss of 0.23. The
model was then exported in tflite format file.
5.1 Robot Movement and Function
Robot acquires its current location and it's heading
direction. Camera looks for known trash objects, if
any are found then using open cv library the robot
locates the object in the frame and tries to center the
object in the frame by steering itself. As the robot is
approaching the object its size in the frame starts to
increase.
The size on reaching a preset threshold the
ultrasonic sensor come into action and precisely
measure the distance to the object. When this distance
becomes equal to the reach of the arm, the motors
stop. Now the arm reaches for the object and picks it
up and puts it in the appropriate bin.
ISPES 2024 - International Conference on Intelligent and Sustainable Power and Energy Systems
32
5.1.1 Trash Detection
Resize the frame and convert it to RGB. Use
MediaPipe’s object detection to identify trash objects.
Draw bounding boxes and label detected trash items.
Display or save the annotated frame with detected
trash. Implemented logic to classify the detected trash
into categories like biodegradable or non-
biodegradable.
5.2 Comparative Analysis
The system in (R and V, 2018) performs the trash
collection task only on grass whereas the proposed
system can perform the trash collection on various
types of hard lands.
The robot in (Bharathi et al., 2018) follows a pre-
defined path and picks up the trash present only the
path of movement. The developed system detects the
trash away from the set path and also collects those
trash objects.
The presented robots make its movement based on
the path following technique or wall following
technique, while this robot makes the path decision
using GPS mode without the requirement of laying
the path on the floor for every region or availability
of bounded area. The existing projects only ensure the
garbage collection neglecting its segregation. The
present system collects and trash and also segregates
them spontaneously. The presented robot does not
require any human intervention between its start and
stop operation.
6 RESULTS
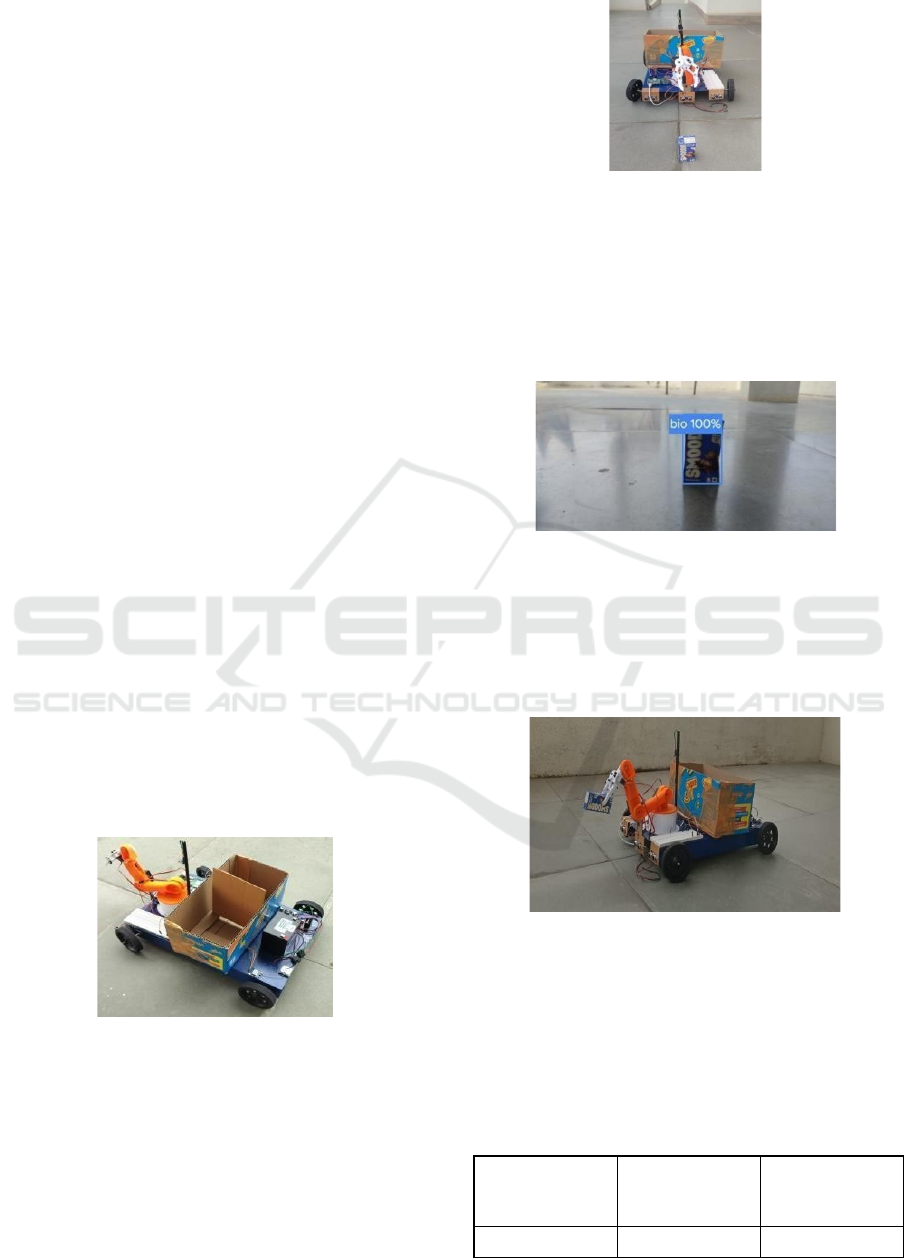
Figure 3: Final Working Robot.
(i) Trash detection
The trash is detected using ML algorithm with an
accuracy of 98 to 100 percent.
The task of trash detection is completely handled
by the Machine learning model that is been build up.
The task is supported by Pi- camera operation.
Figure 4: Trash detection and movement towards trash.
(ii) Trash classification
Trash that is completely non- biodegradable like
plastic material are detected as non-biodegradable.
The trash that is capable of getting decomposed like
fruit peels and paper are identified as biodegradable
material.
Figure 5: Biodegradable garbage identification.
(iii) Trash picking task
The arm is capable of picking up the detected
garbage material with the instructions provided from
the
microcontroller based on the data given by Pi-
Camera and ultrasonic sensor with ML training.
Figure 6: Picking of trash by the robot.
(iv) Model Training
The model is able to provide an output with the
accuracy of 75.5%. The time gap between the
command and the action of the system is recorded as
201ms.
Table 1: Benchmark results for model.
Average
precision
Latency on
Raspberry Pi
4B
Model Size
75.5% 201ms 12MB
Ecobot: Autonomous Trash Collection and Segregation System
33

7 CONCLUSIONS
The robot results as a system that is capable enough
to address the issue of waste management efficiently
from detection to segregation autonomously on
numerous hard land types. The task of waste
identification and classification is performed with use
of camera only with the technology of ML and image
processing without much hardware. This stands as
one of the advantages in the system. The autonomous
nature is another major plus factor for the model. The
robot can be made robust for all find of lands and
trash. The proposed system can be made versatile by
incorporating other techniques few in number only.
The use of IoT can make the robot a wirelessly
accessible, locatable and manageable device.
Bluetooth insertion could make it capable for manual
handling and motion. This feature can be initiated
with the use of radio frequency signal as well. Some
structural changes of increased height can make allow
for trash detection even on grassy areas. Some minor
changes in tyre type, size and thickness can make the
robot usable in rocky and sandy regions as well.
ACKNOWLEDGEMENT
We would like to sincerely thank everyone who
helped us finish this research paper on, "Ecobot;
Autonomous Trash Collection and Segregation
System". We would especially like to thank Mrs.
Deekshitha Arasa, Assistant professor, for her
invaluable advice, steady support, and insightful
observations during the project. We also want to
thank Dayananda Sagar College of Engineering in
Bangalore's Department of Electrical and Electronics
Engineering for their unwavering encouragement and
support.
REFERENCES
Sengupta, V. Varma, M. Sai Kiran, A. Johari, Marimuthu R
(2019). "Cost-Effective Autonomous Garbage
Collecting Robot System Using IoT and Sensor
Fusion", International Journal of Innovative
Technology and Exploring Engineering. Vol-9, Issue -
1, November, DOI: 10.35940.
Bharathi V Asst prof, Gayathri K, Jayashree S, Kiruthika
D, Maheswari P (2018). "Automatic Bin-Bot - Garbage
Collecting System using iot", International Journal of
Engineering Research & Technology (IJERT). ISSN:
2278-0181.
Jinqiang Bai, Shiguo Lian, Zhaoxiang Liu, Kai Wang,
Dijun Liu (2018). "Deep Learning Based Robot for
Automatically Picking up Garbage on the Grass", IEEE
Transactions on Consumer Electronics.
DOI:10.1109/TCE.2018.2859629, CITATIONS 156.
Shikha Parashar1, Pankaj Tomar (2018). "Waste
Management by a Robot- A Smart and Autonomous
Technique", IOSR Journal of Electronics and
Communication Engineering (IOSR-JECE). Volume
13, Issue 3, Ver. II, May- June, PP 31-36.
Purushothaman.R, Bharathi.V (2018). "Automatic Bin Bot-
Garbage Collecting System in Residential Areas and
Enlightening Disposal Mechanism", International
Research Journal of Engineering and Technology
(IRJET). e-ISSN: 2395-0056 Volume: 05 Issue: 08,
August, p-ISSN: 2395-0072.
Rama Prabha D, Sagar Mahindru, Akshat Srivastava and
Nilalohita P (2018). "Autonomous Garbage Collector–
Robo Dumpster", International Journal of Civil
Engineering and Technology. Vol-9, Issue–12,
December, pp. 545–552.
N.Varuneshreddy, K. Nikhil (2018). "Garbage Collection
Robot on the Beach Using Wireless Communications",
International Journal of Research in Engineering,
Science and Management. Vol-1, Issue-10, October,
ISSN: 2581-5782.
Kunda Sreenivas Ulu, K.Kalyani Radha (2017). "Iot Based
Solar Integrated Garbage Monitoring Using Robot on
Raspberry Pi", International Journal of Mechanical
and production Engineering. Vol 5, Issue-10, October,
ISSN: 2320-2092.
Osiany Nurlansa, Dewi Anisa Istiqomah, and Mahendraa
stusangghapawitra (2014). "AGATOR (Automatic
Garbage Collector) as Automatic Garbage Collector
Robot Model", International Journal of Future
Computer and Communication. Vol-3, Issue -5,
October, DOI: 10.7763/IJFCC.2014.V3.329.
S. Reddy, (2020). "Autonomous garbage collection robot",
International Journal of Advanced Research in
Engineering and Technology. Vol.5, no.3, pp. 120–128.
K. Singh and P. Das (2021), "Trash Segregation System
Using Machine Learning", Journal of Environmental
Engineering and Science, vol. 14, no. 2, pp. 89–97.
J. Patel and A. Kumar (2022), "Iot-enabled waste
management systems: Current trends and future
prospects," Smart Cities Journal, vol. 10, pp. 245–260.
P. Sharma, et al (2020)., "Design and implementation of
robotic arm for garbage collection," Robotics and
Systems Engineering Review, vol. 6, no. 1, pp. 50–60,
2020.
T. Shimizu and K. Nakamura (2021), "Machine learning-
based garbage classification and collection robot",
Journal of Robotics Research, vol. 35, no. 4, pp. 285–
298.
ISPES 2024 - International Conference on Intelligent and Sustainable Power and Energy Systems
34
