
Technology Application of Autonomous Vehicle in Machine Learning
Fang Shang
College of Letters and Science, University of California Davis,1 Shields Ave, Davis, CA, United States
Keywords: Autonomous Vehicles, Sensor Fusion, Machine Learning, Object Detection, Multi-Modal Data
Abstract: The development of autonomous vehicle technology has significantly promoted innovation in Sensor Fusion
and Object Detection methods based on Machine Learning, especially in single-modal target detection and
Multi-Modal Data fusion. This research explores object detection techniques based on RGB images and point
cloud data, such as Faster-RCNN and PointNet, to improve performance in complex scenes. These methods
have significant advantages in distinguishing objects in complex scenes, thus enhancing the perception of
vehicles. In addition, research has focused on Multi-Modal Data Fusion technologies, such as fusing images
with point clouds and radar data, to enable autonomous driving systems to better cope with severe weather
and complex environments. By integrating multiple sensor data, these Machine Learning methods improve
the perception and decision reliability of the system. However, challenges in data quality, model
generalization, and robustness remain. To solve these problems, it is necessary to optimize the sensor fusion
algorithm and further enhance the reliability and security of the model. Future research will focus on
improving these sensor fusion strategies to ensure that Autonomous Vehicles achieve reliable and efficient
perception under a variety of real-world conditions, supporting safer and more intelligent autonomous driving
systems.
1. INTRODUCTION
Nowadays, the vigorous development of artificial
intelligence is more and more common in our daily
life, and some intelligent technologies have also
entered people's society. In recent years, autonomous
vehicles have slowly entered the market of society.
Over the past decade, autonomous vehicle technology
has come a long way. The new capabilities of
autonomous vehicle technology will have a profound
impact globally and could significantly change
society (Daily, Medasani, Behringer, and Trivedi,
2017). In simple terms, a self-driving car is a vehicle
that replaces humans with machines and does not
require humans to drive the car. Cars drive
themselves through computer systems and sensor
technology. Autonomous driving requires multiple
functions, including positioning, perception, planning,
control, and management, and information
acquisition isa condition for positioning and
perception (Asif, Faisal, He, and Liu, 2019). Indeed,
autonomous vehicles achieve autonomous driving,
visual computing, radar, monitoring equipment,
global positioning system and other technologies
through computer systems to automatically and safely
cooperate and operate with motor vehicles. These
vehicles use sensors to sense their surroundings and
make driving decisions based on the perceived data,
eliminating the need for an operator. However, the
booming development of autonomous vehicles has
also caused some technical problems in machine
learning, such as autonomous driving relies on sensor
data, including cameras, lidar, radar, etc. However,
the quality and accuracy of the data directly affect the
performance of the model, especially in complex and
dynamic traffic environments. And machine learning
models often rely on specific scenarios or data
distributions during training. However, in practical
applications, autonomous vehicles will encounter
different environments and extreme situations, such
as bad weather, and how to ensure that the model can
generalize and operate safely under different
conditions, which is a problem worth challenging.
2. SINGLE MODALITY TARGET
DETECTION
Autonomous vehicles rely on precise environment-
sensing technology to ensure they can safely navigate
446
Shang and F.
Technology Application of Autonomous Vehicle in Machine Learning.
DOI: 10.5220/0013525800004619
In Proceedings of the 2nd International Conference on Data Analysis and Machine Learning (DAML 2024), pages 446-450
ISBN: 978-989-758-754-2
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

complex road environments. At present, the object
detection methods in automatic driving are mainly
divided into two categories, among which the method
based on RGB image, and the method based on point
cloud data. Methods based on RGB images, such as
Faster-RCNN (Zhou, Wen, Wang, Mu, and Richard,
2021) and SSD (Simhambhatla, Okiah, Kuchkula,
and Slater, 2019), use traditional cameras to capture
visual information and identify and classify different
objects through deep learning models. Point cloud-
based detection methods, such as PointNet (Paigwar,
Erkent, Wolf, and Laugier, 2019) and PointR-CNN
(Oliveira et al., 2023), use three-dimensional point
cloud data generated by radar sensors for spatial
modeling, which can better detect complex structure
and distance information.
2.1 Based on RGB Images
Faster-RCNN algorithm. Faster-RCNN is a common
target detection algorithm, which generates candidate
boxes through area suggestion network (RPN) and
combines with reinforcement neural network (CNN)
for target classification and location (Zhou et al.,
2021). In automatic driving, it is very important to
detect vehicles, pedestrians, road signs and other
targets, and the complexity of the scene puts forward
requirements for detection algorithms. In the Faster-
RCNN algorithm, they use regional proposal network
(RPN) instead of selective search to recommend
candidate proposals, which greatly improves the
quality of candidate proposals, reduces the amount of
computation, and realizes end-to-end training
classification. On the other hand, in the proposed
model, the target detection problem in the automatic
driving scenario, the Faster RCNN network is
optimized and the residual connection module based
on spatial attention is added (Ni, Shen, Chen, Cao,
and Yang, 2022). This module helps the network to
better focus on important details in the input image,
enhance the detection ability of small targets and
blocked targets, and effectively retain discriminant
features to reduce information loss, thus improving
the accuracy of target detection, and is more suitable
for complex automatic driving environments.
Different from before, the working principle of
an improved Faster-RCNN model. Faster-RCNN not
only retains the basic structure of RPN (Zhou et al.,
2021), but also adds residual connection module and
spatial attention mechanism to perform better,
especially when dealing with challenges such as
occlusion and small targets in automatic driving.
These improvements enable the autonomous vehicle
model to better detect fine targets, improving the
accuracy and effect of detection. Meanwhile, similar
to the image-based method of Faster-RCNN, some
methods for detecting SSDS in autonomous vehicles
(Simhambhatla et al., 2019). SSD is an object
detection algorithm based on feedforward form
neural network, which can directly predict fixed-size
bounding boxes. The detection performance of SSD
is achieved by simultaneous target detection with
multi-scale feature maps. The detection results are
efficiently processed with non-maximum suppression
to achieve the maximum boundary box and finally
generate accurate target detection results. CARLA
simulator to generate synthetic data, combined with
SSD and Faster RCNN model for training and testing,
and evaluated its target detection performance in
automatic driving by analyzing various performance
parameters, aiming to improve the accuracy and
practicability of the model (Niranjan, VinayKarthik,
and Mohana, 2021). An explanation of how the SSD
algorithm works and its advantages in object
detection, especially in the application of autonomous
vehicles. Specifically, it illustrates how SSDS can
simultaneously perform object location and
classification tasks with a single forward pass,
avoiding complex steps such as Faster-RCNN that
require a regional proposal network, thereby
increasing detection speed. And the primary role of
SSDS is to enable real-time object detection through
their simple, efficient architecture.
2.2 Point Cloud Based
Compared to methods based on RGB images, point
cloud data has a natural advantage in processing
complex three-dimensional structure and depth
information, especially when detecting distant objects
and dealing with occlusions. Scenario description is
how to deal with the challenges of selective attention
and data accuracy in deep learning. Since these
operations are non-differentiable, the network cannot
be trained by backpropagation. To solve this problem,
the Spatial Transformation Network (STN) module
(Paigwar et al., 2019). The STN module allows the
network to perform an explicit spatial transformation
of the input data internally. In addition, a series of
Point Net methods. The application of the Point Net
family in autonomous vehicles improves perception
by processing 3D point cloud data (Wang and
Goldluecke, 2021). By introducing new key-point
sampling algorithms and integrating dynamic
occupancy heat maps, PointPainting enhances the
understanding of complex scenes, improves the
accuracy of target detection and recognition, and
contributes to the safety and decision-making
capabilities of autonomous driving systems. The
application of visual attention mechanisms and
Technology Application of Autonomous Vehicle in Machine Learning
447

PointNet and its improved methods in autonomous
driving, especially when processing 3D point cloud
data. Visual attention mechanisms help the network
focus on the important parts, while methods such as
PointPainting improve detection efficiency and
accuracy by improving key point sampling and data
fusion. These technologies enable autonomous
vehicles to better perceive complex three-
dimensional environments, especially when detecting
multiple objects and processing dynamic scenes.
A Point R CNN method (Oliveira et al., 2023).
Point R-CNN enables accurate 3D object detection in
self-driving cars by processing point cloud data. Its
two-stage approach combines raw point data and
voxel representation to improve detection efficiency
and accuracy, helping the environment perception
and decision making of the autonomous driving
system. Which indicates that the main role of Point
RCNN in autonomous vehicles is target detection and
recognition based on three-dimensional point cloud
data. Specifically, Point RCNN takes a two-stage
approach to take full advantage of raw point cloud
data and voxel representation. Point RCNN first takes
the voxel representation as input and performs
lightweight convolution operations to produce a small
number of high-quality initial predictions. In the
initial prediction, the attention mechanism effectively
combines the coordinate and indexed convolution
features of each point, preserving both the accurate
positioning of the target object and the context
information. In the second stage, the network uses
fusion features inside the point cloud to further refine
the prediction. The refinement process at this stage
can better capture the fine structure characteristics of
the object, thus enhancing the accuracy of the final
detection results.
3. MULTIMODAL FUSION
In autonomous vehicles, the multi-modal fusion
method refers to the integrated processing of data
from different sensors, such as LiDAR and cameras,
to improve perception, positioning, decision-making
and control capabilities. Single-mode methods are
simple, low cost, and fast to process, but their
performance may be limited in complex
environments. Multimodal fusion combines the
advantages of different sensors to provide greater
perceptual accuracy and safety, suitable for
demanding complex tasks such as autonomous
driving. Because different sensors have different
advantages and limitations, the comprehensive use of
multi-modal data can make up for the shortcomings
of a single sensor and improve the accuracy of the
system.
3.1 Image and Point Cloud Fusion
A new multi-sensor fusion framework for
autonomous vehicles (Shahian Jahromi,
Tulabandhula, and Cetin, 2019). The framework
combines deep learning-based full convolutional
neural networks (FCNx) and traditional Extended
Kalman filters (EKF) to provide cost-effective, real-
time, and robust environment awareness solutions.
This shows that the multi-sensor fusion framework of
image fusion, combined with a full convolutional
neural network and extended Kalman filter, can
optimize the perception tasks such as road
segmentation and obstacle detection. This method
improves the sensing accuracy and can realize real-
time performance in embedded systems. It is
economical, efficient and robust.
A sensor fusion algorithm that is not directly
related to the specific approach of image and point
cloud fusion but focuses on enhancing the robustness
and security of CAVs against sensor failures and
attacks through sensor redundancy and fusion
algorithms, while previous approaches focus on
image and point cloud fusion to improve perception
accuracy (Yang and Lv, 2022). The H∞ controller is
also introduced to reduce the influence of estimation
error and communication noise on vehicle queue
cooperation and expand the application field. In
addition, Farag's Computer Vision-based Vehicle
Detection and Tracking Method (RT_VDT) is used
for autonomous driving or Advanced Driver
assistance systems (ADAS). This method mainly
relies on RGB image processing and generates the
bounding box of the vehicle through a series of
computer vision algorithms, which is significantly
different from the previous image and point cloud
fusion methods. The RT_VDT method relies on RGB
images to realize real-time vehicle detection and
tracking through computer vision algorithms,
emphasizing speed and accuracy, and low computing
resource requirements.
3.2 Image and radar data fusion
In addition to image and point cloud fusion in
multimodal, image and radar data fusion can enhance
detection, and how can analysis radar data
supplement image data, especially in severe weather
conditions. A dynamic Gaussian method, whose
process performs occupation mapping, to determine
the drivable area of the autonomous vehicle within
DAML 2024 - International Conference on Data Analysis and Machine Learning
448
the radar field of view (Hussain, Azam, Rafique,
Sheri, and Jeon, 2022). Different from the deep
learning technology that relies on a large amount of
data, the Gaussian process method can still work
effectively in the case of sparse data and the
combination of image data and radar data, and the
dynamic Gaussian process can combine the
environmental information provided by the radar and
the detailed information provided by the image sensor
to enhance the perception and path planning
capabilities of the automatic driving system under
different environmental conditions. The application
of multi-radar data fusion technology in the
environment perception of autonomous vehicles,
especially the weight calculation method in the case
of sensor data deviation (Ren, He, and Zhou, 2021).
This study uses correlation changes between sensors,
sensor consistency, and stability to evaluate sensor
reliability, thereby optimizing the data fusion process.
Different from the dynamic Gaussian process, this
method focuses on the data fusion of multiple radar
sensors, especially dealing with the sensor data
deviation problem, and optimizing the weight by
evaluating the correlation between sensors.
Compared with the previous Gaussian process
method, the dynamic evaluation of sensor
performance is emphasized.
The application of radar-based environmental
perception to high automation and the transformation
of radar and camera information fusion methods
(Dickmann et al. ,2016) and (Liu, Zhang, He, and
Zhao, 2022). It emphasizes the need for fast situation
update, dynamic object motion prediction, position
estimation and semantic information in the driverless
phase, and requires radar signal processing to provide
revolutionary solutions in these new fields. And to
solve the inherent defects of a single sensor in bad
weather conditions. The scheme uses the radar as the
main hardware and the camera as the auxiliary
hardware to match the observed values of the target
sequence by using the Mahalanobis distance and
performs data fusion based on the joint probability
function. Both approaches emphasize the use of radar
as the primary sensor, with cameras as auxiliary, to
optimize data fusion through Mahalanobis distance
matching and joint probability functions, with a
particular focus on performance improvements in
adverse weather conditions. The previous approach
may be broader and not refer specifically to bad
weather or specific matching algorithms.
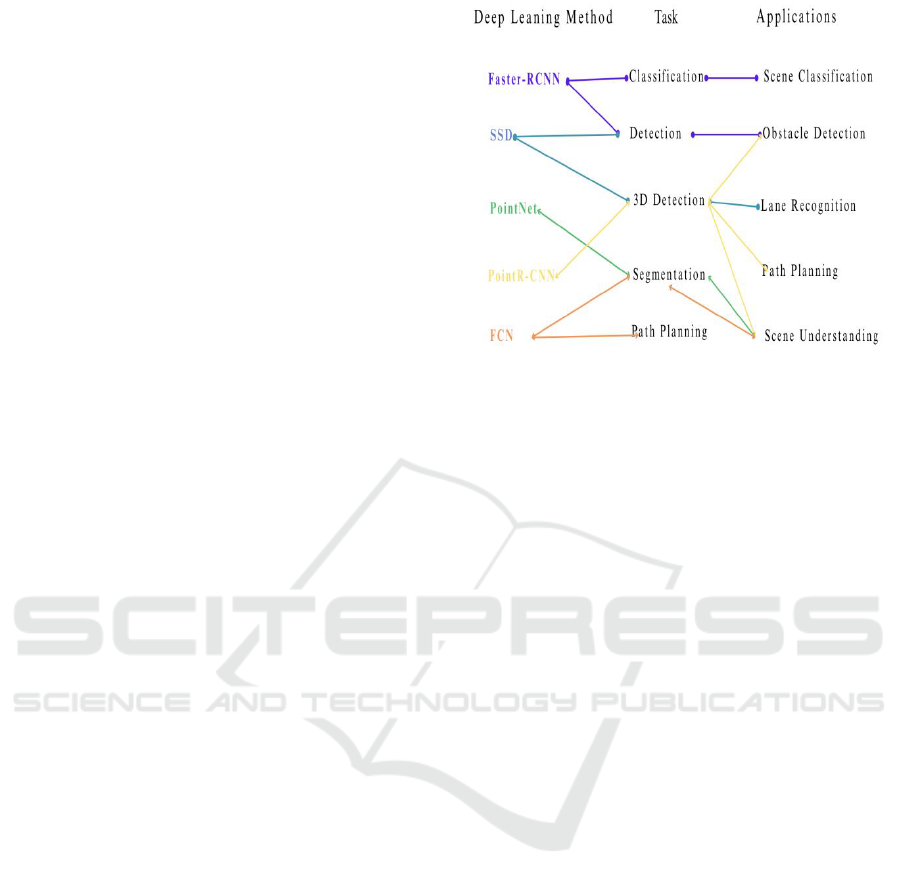
Figure 1: Deep learning tasks and applications
See the picture above. Figure 1 shows the relationship
between tasks and applications of deep learning
methods in autonomous driving. The application of
autonomous vehicles in machine learning covers a
variety of deep learning methods and specific tasks.
These methods include Faster-RCNN, SSD, PointNet,
PointR-CNN, and FCN, each of which plays a critical
role in different tasks and application scenarios.
Faster-RCNN is mainly used for classification and
object detection, such as scene classification and
obstacle detection, to help autonomous vehicles
identify objects in the environment. SSDS are also
used for object detection and are particularly suitable
for real-time obstacle detection. PointNet and PointR-
CNN are better at 3D object detection and
segmentation for tasks such as lane recognition and
scene understanding, helping cars better sense and
navigate in complex 3D environments. FCN is used
for path planning and scene understanding to ensure
that the vehicle can plan a safe driving path by
splitting the various elements of the environment. The
tasks and applications of each deep learning approach
complement each other, working together to enable
the perception, decision making, and control
functions of autonomous driving systems, thereby
improving the safety and reliability of driving. This
fully demonstrates the widespread application of
machine learning in autonomous driving and its
indispensable value.
4. CONCLUSIONS
However, sensor data quality and model
generalization ability in complex environments are
still urgent problems to be solved. At present,
Technology Application of Autonomous Vehicle in Machine Learning
449

automatic driving target detection methods mainly
include Faster-RCNN (Zhou et al., 2021) based on
RGB images and PointNet based on point cloud data.
The RGB image method focuses on visual
recognition and point cloud data is more suitable for
processing three-dimensional structures. In addition,
multi-modal fusion technology combines data from
different sensors to effectively improve perception,
positioning and decision-making capabilities. Future
improvements and research will make breakthroughs
in improving sensor data quality, optimizing multi-
modal fusion algorithms, and enhancing model
generalization ability. First, improving the data
quality of the sensors is the basis for ensuring the safe
operation of the autonomous driving system in
complex road conditions, especially the accuracy of
data acquisition in bad weather is crucial. Second, the
optimization of multimodal fusion technology will
enable autonomous vehicles to better combine data
from cameras, LiDAR and radar to improve
environmental awareness and decision-making. In
addition, enhancing the generalization ability of the
model will be key, especially in response to different
geographical environments and uncertainties, and the
robustness of the model needs to be significantly
improved. These future studies will advance the
safety and reliability of autonomous driving systems
in the real world, preparing them for wider
deployment.
REFERENCES
Daily, M., Medasani, S., Behringer, R., & Trivedi, M.,
2017. Self-driving cars. Computer, 50(12), pp. 18–23.
Dickmann, J., et al., 2016. Automotive radar: The key
technology for autonomous driving: From detection
and ranging to environmental understanding. In 2016
IEEE Radar Conference (RadarConf), Philadelphia,
PA, USA, pp. 1–6.
Faisal, A., et al., 2019. Understanding autonomous vehicles:
A systematic literature review on capability, impact,
planning, and policy. Journal of Transport and Land
Use, 12(1), pp. 45–72.
Hussain, M. I., Azam, S., Rafique, M. A., Sheri, A. M., &
Jeon, M., 2022. Drivable region estimation for self-
driving vehicles using radar. IEEE Transactions on
Vehicular Technology, 71(6), pp. 5971–5982.
Liu, Z., Zhang, X., He, H., & Zhao, Y., 2022. Robust target
recognition and tracking of self-driving cars with radar
and camera information fusion under severe weather
conditions. IEEE Transactions on Intelligent
Transportation Systems, 23(7), pp. 6640–6653.
Ni, J., Shen, K., Chen, Y., Cao, W., & Yang, S. X., 2022.
An improved deep network-based scene classification
method for self-driving cars. IEEE Transactions on
Instrumentation and Measurement, 71, pp. 1–14.
Niranjan, D. R., VinayKarthik, B. C., & Mohana, 2021.
Deep learning-based object detection model for
autonomous driving research using CARLA simulator.
In 2021 2nd International Conference on Smart
Electronics and Communication (ICOSEC), Trichy,
India, pp. 1251–1258.
Paigwar, A., Erkent, O., Wolf, C., & Laugier, C., 2019.
Proceedings of the IEEE/CVF Conference on
Computer Vision and Pattern Recognition (CVPR)
Workshops. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern
Recognition (CVPR) Workshops, pp. 0–0.
Ren, M., He, P., & Zhou, J., 2021. Improved shape-based
distance method for correlation analysis of multi-radar
data fusion in self-driving vehicles. IEEE Sensors
Journal, 21(21), pp. 24771–24781.
Shahian Jahromi, B., Tulabandhula, T., & Cetin, S., 2019.
Real-time hybrid multi-sensor fusion framework for
perception in autonomous vehicles. Sensors, 19(19), pp.
4357.
Silva, A. L., Oliveira, P., Duraes, D., Fernandes, D., Nevoa,
R., Monteiro, J., Melo-Pinto, P., & Machado, J., 2023.
A framework for representing, building, and reusing
novel state-of-the-art three-dimensional object
detection models in point clouds targeting self-driving
applications. Sensors, 23(23), pp. 6427.
Simhambhatla, R., Okiah, K., Kuchkula, S., & Slater, R.,
2019. Self-driving cars: Evaluation of deep learning
techniques for object detection in different driving
conditions. SMU Data Science Review, 2(1), pp. 1–23.
Wang, L., & Goldluecke, B., 2021. Sparse-PointNet: See
further in autonomous vehicles. IEEE Robotics and
Automation Letters, 6(4), pp. 7049–7056.
Yang, T., & Lv, C., 2022. A secure sensor fusion
framework for connected and automated vehicles under
sensor attacks. IEEE Internet of Things Journal, 9(22),
pp. 22357–22365.
Zhou, Y., Wen, S., Wang, D., Mu, J., & Richard, I., 2021.
Object detection in autonomous driving scenarios based
on an improved Faster-RCNN. Applied Sciences,
11(11), pp. 11630.
DAML 2024 - International Conference on Data Analysis and Machine Learning
450
