
Fatigue Driving Warning Internet System of Vehicles Based on
Trajectory and Facial Feature Fusion
Zihan Li
1,*
a
, Siqi Yang
2
b
and Teng Zhou
3
c
1
School of Software Engineering, Tongji University, Shanghai, China
2
School of Computing and Artificial Intelligence, Southwest Jiaotong University, Sichuan, China
3
New Engineering Industry College, Putian University, Fujian, China
*
Keywords: Image Recognition, Internet of Vehicles, Fatigue Driving.
Abstract: Fatigue driving is one of the common factors leading to traffic accidents. To mitigate its risks, this study
proposes a vehicle network-based warning system for detecting fatigue driving through information fusion
and develops a corresponding simulation prototype. First, the drivers' facial images and vehicle trajectory data
are pre-processed to enhance model training accuracy. Then, a detection framework based on ResNet50 is
constructed to integrate and analyze the facial features of drivers and vehicle trajectories for identifying
fatigue driving behavior. Finally, the architecture of the vehicle network early warning system is designed to
utilize the identification results. Once signs of fatigued driving are detected, the system will automatically
issue an alert to help drivers prevent accidents caused by drowsy driving, ensuring road and driver safety. The
code for the system part can be found at https://github.com/Theo-teng/Internet-of-Vehicles-Simulation.git.
1 INTRODUCTION
With the continuous increase in the number of
vehicles, the road traffic safety problem is becoming
increasingly serious. As one of the main causes of
traffic accidents, fatigue driving is significantly
harmful. Therefore, the research and development of
fatigue driving detection and the early warning
system are significant in reducing the incidence of
traffic accidents.
Fatigue driving recognition technology mainly
relies on the monitoring of drivers' physiological and
behavioral characteristics, such as electrooculogram,
facial key point, and motion capture (Tian & Cao,
2021; Chen et al., 2021; Liu et al., 2020). Although
such detection techniques are mature enough, their
effectiveness is still limited by a single type of data
source. For example, facial recognition may be
affected by factors such as light changes and facial
occlusion. In existing studies of fused data sources,
although multiple data sources such as blink
frequency and driving route offset are considered,
these methods rely on manually setting the positive
a
https://orcid.org/0009-0004-1526-5148
b
https://orcid.org/0009-0005-3714-5937
c
https://orcid.org/0009-0008-2296-5416
sample threshold (Tang, 2024). Therefore, this study
fuses the changes in the driver's facial state and
vehicle trajectory through data fusion to make up for
the shortcomings of a single detection method to a
certain extent and improve the overall robustness of
the system.
The rise of the Internet of Vehicles (IoV) provides
new solutions and application scenarios for fatigue
driving detection technology (Abbas & Alsheddy,
2020). Real-time monitoring of fatigue driving
behavior can be achieved by collecting and analyzing
vehicle driving data through the IoV platform. Based
on the fatigue driving recognition method in this
study, this paper proposes a real-time recognition and
warning scheme for the vehicle networking system.
When the system detects the driver's fatigued driving
behavior, the warning will be carried out through both
in-vehicle and inter-vehicle channels, to avoid the
safety hazards brought by fatigued driving behavior.
The rest of the paper is organized as follows.
Section 2 describes the techniques used and their
advantages; Section 3 describes the methodology
used in the study and the implementation details,
412
Li, Z., Yang, S., Zhou and T.
Fatigue Driving Warning Internet System of Vehicles Based on Trajectory and Facial Feature Fusion.
DOI: 10.5220/0013525100004619
In Proceedings of the 2nd International Conference on Data Analysis and Machine Learning (DAML 2024), pages 412-417
ISBN: 978-989-758-754-2
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

where the architecture is divided into data pre-
processing, information fusion recognition, and the
framework of the IoV system, and concludes with an
evaluation of the model; Section 4 presents the
experimental results and discusses the advantages and
disadvantages in comparison with other models, as
well as the performance changes before and after the
model improvement; Section 5 summarises the
research, explains the advantages and significance of
this research, and the direction of future work.
2 METHODOLOGYS
ResNet50 is selected as the target detection model
framework (He et al., 2015). ResNet50 was proposed
by Kaiming He of Microsoft Research in 2015 and
won the championship of the ILSVRC (ImageNet
Large Scale Visual Recognition Challenge) image
classification competition in that year, which proved
ResNet50's effectiveness and superiority in
processing large-scale image data. Meanwhile, due to
its excellent generalization ability and availability of
pre-trained models, ResNet50 is widely used in a
variety of computer vision tasks.
The residual connections in the structure allow
information to be passed in direct jumps between
network layers, and batch normalization and
activation functions are also used in each residual
block to improve the performance of the model. A
7×7 convolutional kernel with a step size of 2 is used
at the top of the model to reduce the resolution of the
image to speed up the model training, after that each
layer of ResNet50 is based on a 3×3 convolutional
kernel with a step size of 1 for extracting the features,
and at the end of the model there is a global average
pooling layer and a full connectivity layer for the final
classification.
3 DATASETS
3.1 Dataset Description
The datasets KITTI and Driver Drowsiness Dataset
(D3S) are selected as model training samples (Geiger
et al., 2012; Gupta et al., 2018). The KITTI dataset
provides a large amount of sensor data from real
driving, which contains the vehicle trajectory data
needed for this study. The D3S dataset contains
22348 fatigue driving images and 19445 normal
driving images, which have been all segmented with
face regions for easy use in model training.
3.2 Facial Data Preprocessing
The pre-processing of the portrait is to convert the
color portrait data in the D3S dataset into grey-scale
images. The grey scale histogram equalization
method is used to make the brightness of the image
uniform and to highlight the features of the portrait.
The image comparison before and after processing is
shown in Figure 1.
(a) (b)
Figure 1: Original image and image after grey scale
processing of the D3S dataset. (a) is the original image, (b)
is the processed image (Photo/Picture credit: Original).
3.3 Trajectory Data Preprocessing
Firstly, canny edge detection is carried out, that is,
after binarizing the image, a suitable threshold is set
to prepare for obtaining the edge of the lane line, after
detection, ROI extraction is carried out to obtain the
accurate edge of the lane line, the edge detection
result of this region is cropped out, and then the
Hough transform is carried out for straight line
detection in the ROI region, the central idea of this
operation is to represent a straight line with a
coordinate point and to find out the lane line and then
plot it on the original map, as shown in Figure 2.
Figure 2: Lane line detection and mapping on the KITTI
dataset (Photo/Picture credit: Original).
Write a function to calculate the slope of the lane
line segment and calculate the radius of curvature of
the lane to facilitate the subsequent accurate
Fatigue Driving Warning Internet System of Vehicles Based on Trajectory and Facial Feature Fusion
413

determination of driver fatigue by this offset. The
formula is shown in Equation (1).
𝐾=
|
𝑓
(
𝑥
)|
(
1+𝑓
(
𝑥
)
)
(
1
)
where 𝑓(x
) is a close-circle expression, 𝑓(𝑥
) is
the first-order derivative of this expression, and
𝑓(𝑥
) is the second-order derivative.
4 INFORMATION FUSION
IDENTIFICATION
In this paper, a ResNet50 model is trained based on
the tracking dataset KITTI and the facial image
dataset D3S. It can independently recognize whether
the lane segments in the tracking dataset are offset or
not, and judge fatigue driving according to the degree
of offset, and the human face in the facial image
dataset can be recognized, and judgement can be
made according to the expression of the face. The
recognition results are fused in the fully connected
layer of ResNet50, and the final model can detect
fatigue driving based on these two types of datasets.
This paper uses ResNet50 to recognize the
features of the driver's face, compared with the
traditional neural network, ResNet50 has a deeper
network structure, and the problem of gradient
disappearance in the training of the deep network is
mitigated by the introduction of the residual
connection, which effectively improves the
performance of the model.
5 INTERNET OF VEHICLES
SYSTEM
5.1 System Design
An IoV system has been designed that applies the
fatigue driving recognition mentioned above in this
paper. Figure 3 shown the
flowchart of feature
processing and fusion. The system architecture diagram
shown in Figure 4 briefly describes the components
of the system, while Figure 5 briefly describes the
workflow of the system's detection and warning
modules.
As shown in Figure 4, the system consists of a
Hardware Layer, Interface Layer, Service Layer, Data
Layer, and External Systems.
Hardware Layer mainly consists of in-vehicle
cameras, sensors, and warning devices. The in-
vehicle camera is mainly used to capture the facial
image of the driver. Sensors are mainly used to collect
vehicle status and position information, including but
not limited to GPS positioning, vehicle speed sensors,
and attitude information collection cameras. Out-of-
vehicle warning devices mainly include lights and car
horns. The onboard display is used to be able to
provide warning information and possible operation
options, including sending warnings to the co-driver
for the vehicle and warnings for other vehicles.
Interface Layer consists of a data acquisition
interface, a command execution interface, and a
communication interface. Data acquisition interface
is responsible for collecting data from the hardware
layer and transmitting it to the functional layer.
Command execution interface is responsible for
receiving commands from the functional layer and
sending them to the hardware layer. Communication
interface is responsible for the external
communication interface of the vehicle, which is used
for data transmission with other vehicles.
The service Layer is mainly composed of a local
data processing module, fatigue detection module,
and decision engine. The data processing module
processes the images captured by the camera and the
sensor signals according to the data preprocessing
process and provides grey-scale images and other
data after processing. The fatigue detection module
performs fusion recognition detection and outputs
driver fatigue detection results. The decision engine
decides whether to trigger a warning based on the
fatigue detection result.
The Data Layer consists of a local database and a
cloud database. The local database is used to store
vehicle status, driver behavior data, and fatigue
detection results. The cloud database is used for
distributed permanent storage of data for subsequent
data analysis and model training.
External Systems, i.e. other vehicles, can receive
warning messages and take appropriate measures.
Figure 3: Flowchart of feature processing and fusion (Photo/Picture credit: Original).
DAML 2024 - International Conference on Data Analysis and Machine Learning
414
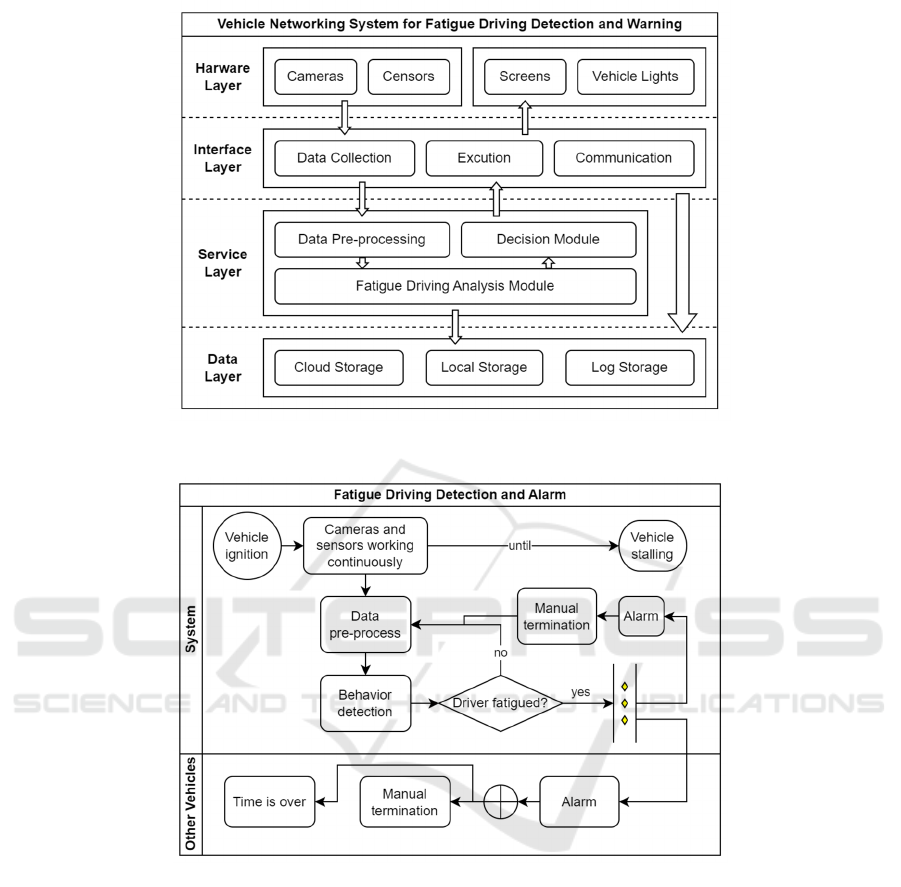
Figure 4: Architecture diagram of the IoV system (Photo/Picture credit: Original).
Figure 5: Flowchart of detection and warning module (Photo/Picture credit: Original).
As shown in Figure 5, the system works
continuously after the vehicle ignition. Once a
fatigued driving behavior is detected, the system will
simultaneously send warnings both in-vehicle and
inter-vehicle. The in-vehicle alarm continues to
operate until manually canceled, indicating that the
driver is sober enough. The alarms in other vehicles
can also be terminated by time limits.
5.2 System Simulation
The two simulators, the OMNeT++ network
simulation platform, and the SUMO road traffic
simulation platform, are connected via TCP sockets,
allowing for bi-directional coupled simulation of road
traffic and network traffic (Sommer et al., 2011;
Behrisch et al., 2011; Varga & Horning, 2008). In this
case, the movement of vehicles in SUMO is mapped
to the movement of nodes in the OMNeT++
simulation. The goal is to build a communication
simulation framework for the Internet of Vehicles
based on SUMO and OMNeT++ and to build a
simulation environment in Oracle VM VirtualBox
VM environment through Veins' mirrors for signal
warning simulation. The environment for this
experiment is Oracle VM VirtualBox 7.0.20,
Windows 11. The Veins version framework is
instant-veins-5.2-i1.
Fatigue Driving Warning Internet System of Vehicles Based on Trajectory and Facial Feature Fusion
415
5.3 Simulation Content
In OMNET++, the INET standard host is used to
simulate wireless communication between mobile
hosts, and two static wireless communication hosts
are created. The network contains two hosts, one of
which sends a UDP data stream to the other host
wirelessly, aiming to simplify the physical layer and
low-level modules so that the network can be
expanded in the future. To achieve wireless
communication, the INET module in OMNET++
needs to create a radio medium, which represents the
shared physical medium on which all
communications in the simulation rely and is
responsible for signal propagation, loss, interference,
etc. Through code implementation, the
communication range of host A and host B can be
visualized, and the propagation process of UDP
signals can be displayed at the same time. The
transmission process is presented in the form of
colored rings. The movement of the host is managed
by the mobile submodule, which extends the mobility
of the standard host and displays its speed and
movement trajectory through visualization tools.
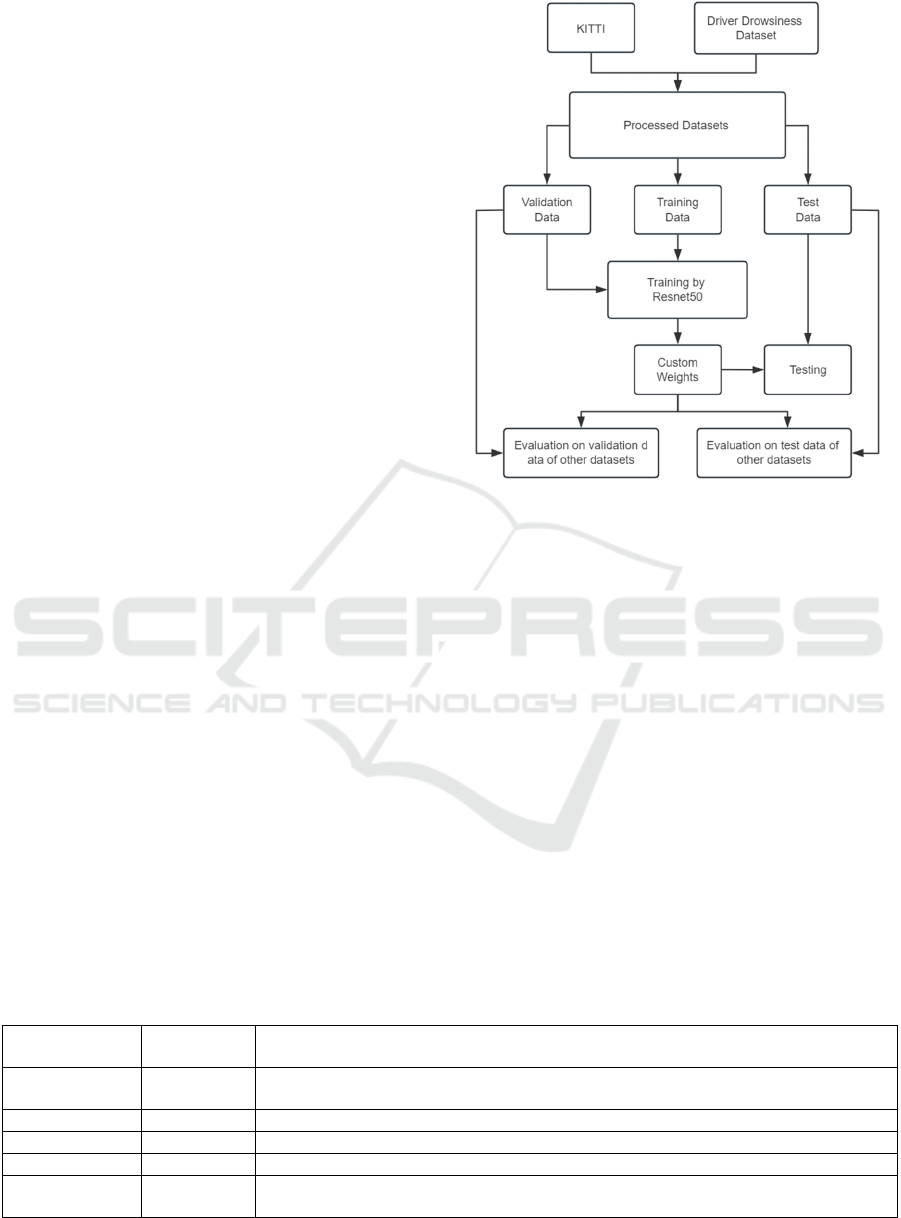
6 EXPERIMENTAL
In this experiment, the dataset is first pre-processed
and then divided into a validation set, training set, and
test set, the validation set test set is trained by
ResNet50, the weights are adjusted and then tested in
the test set, and finally, the validation and testing are
performed on another dataset. The experimental flow
of this paper is shown in Figure 6.
6.1 Experimental Settings
D3S and KITTI are used as the datasets, which are
divided into training and testing sets in a ratio of 9:1,
and the important hyper-parameter settings during the
training process are shown in Table 1.
Figure 6: Training and assessment process (Photo/Picture
credit: Original).
6.2 Experimental Results
The performance performance of the model is shown
in Table 2 below, and by analyzing the model's
accuracy, precision, and recall, it can be seen that the
model performs better in detecting driver fatigue.
The model effectively distinguishes between
fatigued and non-fatigued driving behaviors in most
cases. The system produces fewer false alarms when
detecting fatigued driving, reducing the risk of
incorrectly detecting normal driving as fatigued
driving. For a fatigue driving warning system, too
many false alarms may affect the driver's trust. Strong
sensitivity in detecting fatigued driving behaviors,
effective in capturing most fatigued driving
behaviors, and the model performs well in balancing
precision and recall. Balancing forecast reduction and
capturing more fatigued driving behaviors.
Table 1: Hyperparameter settings for model training.
Hyperparamete-
rization
Setting Instructions
learning rate 0.005 The step size of the model weight adjustment allows for fast convergence of the
trainin
g
optimize
r
Adam Lower loss values to reduce the gap between model output values and real labels
weight deca
y
0.0001 Preventing overfitting
b
atch size 32 Number of samples entered into the model in each iteration of training
loss function Cross-
EntropyLoss
Calculate the gap between the forward computed result and the true value for each
iteration of the neural networ
k
DAML 2024 - International Conference on Data Analysis and Machine Learning
416
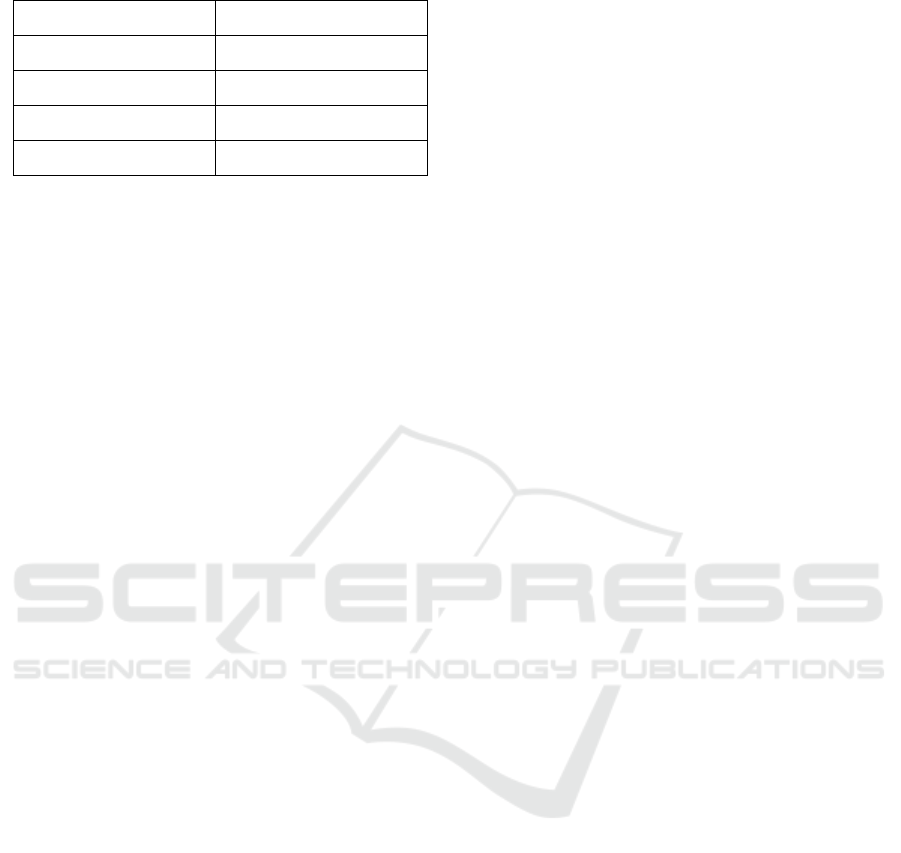
Table 2: Model performance.
Evaluation Value
Accuracy 87.63%
Precision 89.69%
Recall 86.14%
F1-score 87.88%
7 CONCLUSIONS
This work focuses on improving the fatigue driving
recognition model and designing an alert system for
fatigue driving in the IoV system. There are three
main advantages of this work. The first is combining
image and trajectory information for fatigue driving.
The facial expression of the driver is captured by
image information, while the driving pattern of the
vehicle is analyzed by trajectory information, which
improves the accuracy of identifying the fatigued
driving state. Second, the fusion of the two kinds of
data at the model level is achieved, which does not
rely on manually setting thresholds for judgment.
Compared with the existing multimodal data
decision-making algorithms, the recognition process
is more flexible and stable. Finally, by combining the
fatigue driving recognition system with IoV, the
design of a fatigue driving warning system in-vehicle
and inter-vehicle is proposed, which provides a new
solution for the application of fatigue driving
recognition algorithms. Based on this study, the
future research directions are as follows. Further
training of the model, the existing model version is
limited by time and resources, and the accuracy can
be improved. Experiment with other model
frameworks and data sources and train on more
datasets to find a better solution for fatigued driving
recognition. Continue to complete the development of
the simulation application for the IoV system in the
short-term plan and further apply the design to a real
IoV system in the long-term plan.
AUTHORS CONTRIBUTION
All the authors contributed equally and their names
were listed in alphabetical order.
REFERENCES
Tian, Y., & Cao, J., 2021. Fatigue driving detection based
on electrooculography: A review. EURASIP Journal on
Image and Video Processing, 2021(1), 33.
Chen, L., Xin, G., Liu, Y., Huang, J., & Chen, B., 2021.
Driver Fatigue Detection Based on Facial Key Points
and LSTM. Sec. and Commun. Netw., 2021.
Liu, L., Wang, Z., & Qiu, S., 2020. Driving Behavior
Tracking and Recognition Based on Multisensor Data
Fusion. IEEE Sensors Journal, 20(18), 10811–10823.
Tang, X., 2024. Research on Dangerous Driving Behavior
Recognition based on the fusion of localization and
vision technology. [Unpublished master’s thesis].
Nanjing University of Science and Technology
Awarding the Degree.
Abbas, Q., & Alsheddy, A., 2020. Driver Fatigue Detection
Systems Using Multi-Sensors, Smartphone, and Cloud-
Based Computing Platforms: A Comparative Analysis.
Sensors (Basel, Switzerland), 21.
He, K., Zhang, X., Ren, S., & Sun, J., 2015. Deep Residual
Learning for Image Recognition. 2016 IEEE
Conference on Computer Vision and Pattern
Recognition (CVPR), 770-778.
Geiger, A., Lenz, P., & Urtasun, R., 2012. Are we ready for
autonomous driving? The KITTI vision benchmark
suite. 2012 IEEE Conference on Computer Vision and
Pattern Recognition, 3354-3361.
Gupta, I., Garg, N., Aggarwal, A., Nepalia, N., & Verma,
B., 2018. Real-Time Driver's Drowsiness Monitoring
Based on Dynamically Varying Threshold. 2018
Eleventh International Conference on Contemporary
Computing (IC3), 1-6.
Sommer, C., German, R., & Dressler, F., 2011.
Bidirectionally Coupled Network and Road Traffic
Simulation for Improved IVC Analysis. IEEE
Transactions on Mobile Computing, 10, 3-15.
Behrisch, M., Bieker, L., Erdmann, J., & Krajzewicz, D.,
2011. SUMO - Simulation of Urban MObility. The
Third International Conference on Advances in System
Simulation, pp. 63-68
Varga, A., & Hornig, R., 2008. An overview of the
OMNeT++ simulation environment. International
ICST Conference on Simulation Tools and Techniques.
Fatigue Driving Warning Internet System of Vehicles Based on Trajectory and Facial Feature Fusion
417
