
Traffic Prediction Using LSTM, RF and XGBoost
Ka Nam Lam
a
School of Mathematics, University of Bristol, Fujian, China
Keywords: Traffic Flow Prediction, Machine Learning, LSTM, XGBoost, Random Forest.
Abstract: Traffic congestion is one of the most challenging and lasting problems that causes many government concerns.
It would lead to many problems, such as economic losses, fuel consumption, environmental costs, and so on.
An efficient traffic system can significantly reduce congestion, which can bring many beneficial impacts on
daily life. Accurate traffic flow prediction is crucial for effective traffic management. This study uses three
machine learning models: Random Forest (RF), Extreme Gradient Boosting (XGBoost), and Long Short-
Term Memory (LSTM) to predict vehicle counts at four different junctions of a city. Each of these models
was evaluated based on key metrics – Mean Absolute Error (MAE), Root Mean Squared Error (RMSE), and
R-squared (𝑅
). The outcomes showed that XGBoost performed the best among the examined models in
terms of precision and computational efficiency. This paper also discusses the limitations of the models and
future implications, which can be helpful in better managing transportation systems.
1 INTRODUCTION
Traffic congestion is a chronic problem affecting
urban environments globally, which may be caused
by high population density, increased number of
vehicles, and infrastructural development (Vencataya
et al., 2018). Therefore, effectively managing the
traffic system is one of the most significant issues
faced by modern cities nowadays. Accurate traffic
flow prediction is an essential component of an
intelligent traffic system. However, predicting traffic
is very complex due to its dynamic nature, as
researchers must consider various factors, including
peak hours, weather conditions and special events.
These factors are not correlated linearly, so traffic
prediction becomes a challenging problem that
requires more advanced analytical methods/models
(Hong et al., 2015; Joaquim et al., 2015).
Over the years, many methods have been used to
address the traffic prediction issue. In the last decade,
researchers have commonly used statistical
approaches, such as Autoregressive Integrated
Moving Average (ARIMA) and Kalman filters,
which have been the most studied techniques for time
series forecasting. These methods are well-suited for
simple linear relationship problems. However, traffic
prediction is a complex spatial problem. Thus, they
a
https://orcid.org/0009-0003-9338-1956
presented difficulties in addressing such predictions
(Medina-Salgado et al., 2022). Researchers have
developed new methods to better manage traffic
predictions and deal with new challenges.
Several machine learning techniques have been
developed for traffic prediction. For example, models
like Support Vector Machine (SVM), K-nearest
Neighbors (KNN) and Artificial Neural Networks
(ANN) have achieved better results to a certain
degree, as they can better capture the non-linear
patterns in the traffic data, thus becoming more
appropriate choices for this problem. For example,
Hong et al. (2015) proposed a hybrid multi-metric
KNN model for the forecast of traffic flow, which
showed better accuracy in combining a set of metrics
to capture different data patterns.
Furthermore, many researchers have also used
tree-based machine learning models such as Random
Forest (RF) and Extreme Gradient Boosting
(XGBoost) because they can bear more complex data
entries. For instance, Wang and Fang (2024)
combined XGBoost with wavelet analysis to improve
short-term traffic flow prediction. They demonstrated
the model’s efficiency and precision in capturing
periodic patterns.
Deep learning models, especially Long Short-
Term Memory (LSTM) networks, have recently been
Lam and K. N.
Traffic Prediction Using LSTM, RF and XGBoost.
DOI: 10.5220/0013515600004619
In Proceedings of the 2nd International Conference on Data Analysis and Machine Learning (DAML 2024), pages 267-274
ISBN: 978-989-758-754-2
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
267
trending in traffic prediction. As LSTM networks are
designed to process sequential data and are capable of
memorizing information for a long period of time, so
this model is suitable for operating on time series
data. LSTM models have been widely applied in
various studies, especially in time series data
forecasting, and their good performance has been
proven accordingly. For instance, Ye et al. (2024)
carried out a thorough analysis of traffic flow
prediction by LSTM networks and outlined the
capability for modelling complicated temporal
dependencies in traffic data. While LSTM has many
merits, its drawbacks might be long computational
time and large sizes of datasets to achieve optimal
performance.
The main objective of this study is to identify a
machine learning model that can accurately predict
traffic flow at different junctions of a city. This study
considers three kinds of machine learning models:
LSTM Networks, RF, and XGBoost. These models
have unique advantages regarding handling time
series data, non-linear relationships, and feature
importance, making them suitable for traffic
prediction. The study evaluates the performance of
these models by metrics such as Mean Absolute Error
(MAE), Root Mean Squared Error (RMSE) and R-
squared (𝑅
) to determine the most effective model
for traffic prediction.
The rest of the article is structured as follows:
Section 2 discusses the methodology used in this
paper, involves data preprocessing steps, model
description, and the metric used to evaluate models’
performance. Section 3 presents the results of the
model evaluations and compares their performances
based on key metrics. Section 4 discusses the
limitations of the study and the future works that
could improve the models. Finally, the conclusions
are drawn in Section 5.
2 DATA PREPARATION AND
MODEL OVERVIEW
2.1 Dataset Overview
Table 1: Dataset sample.
Date Time Junction Vehicles ID
0
2015-11-01
00:00:00
1 15 20151101001
1
2015-11-01
01:00:00
1 13 20151101011
2
2015-11-01
02:00:00
1 10 20151101021
3
2015-11-01
03:00:00
1 7 20151101031
The dataset used in this project was sourced from
Kaggle (Fedesoriano, 2021). It contains vehicle
counts across four junctions over several years. The
dataset contains 48120 rows of data, with each row
representing an individual traffic observation. Each
observation has features shown in Table 1, including
DateTime: the exact time of the observation, which
indicates the month, day, and hour; Junction: the
junction number where the observation was recorded;
Vehicles: the number of vehicles passing through the
junction at the time; Unique ID: an identifier for the
row data. The target variable was the number of
vehicles for the next hour.
2.2 Data Preprocessing
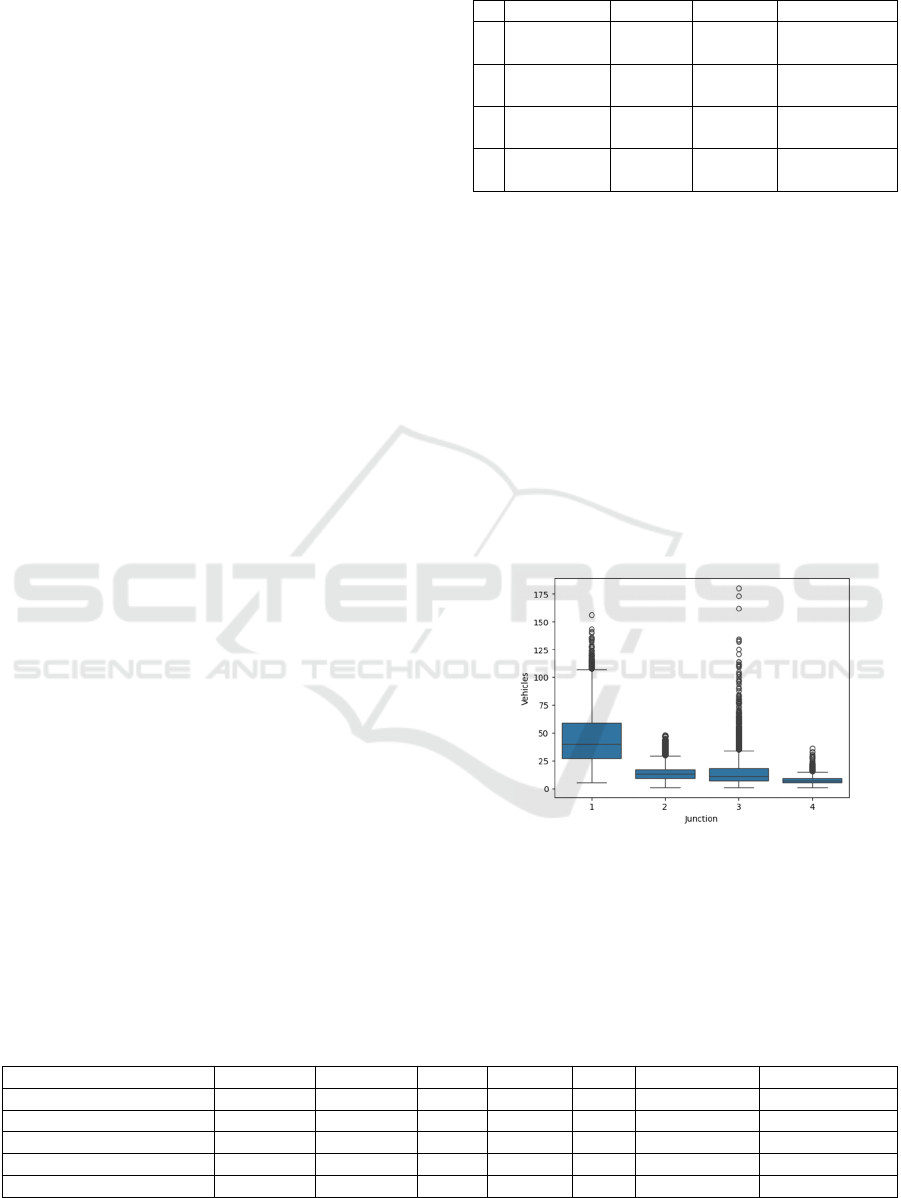
Figure 1: Outliers of vehicle counts for each junction
(Photo/Picture credit: Original).
Data preprocessing is a critical step in machine
learning model development, particularly for time
series data such as traffic data, to enable models to
learn
and analyze the patterns in data effectively.
Table 2: Dataset after feature engineering.
DateTime Junction Vehicles Yea
r
Month Da
y
Hou
r
Da
y
of wee
k
2015-11-01 00:00:00 1 15 2015 11 1 0 6
2015-11-01 01:00:00 1 13 2015 11 1 1 6
2015-11-01 02:00:00 1 10 2015 11 1 2 6
2015-11-01 03:00:00 1 7 2015 11 1 3 6
2015-11-01 04:00:00 1 9 2015 11 1 4 6
DAML 2024 - International Conference on Data Analysis and Machine Learning
268

Table 3: ADF test for vehicle count data.
ADF statistic
p
-value 1% critical value 5% critical value 10% critical value Stationarit
y
Junction 1 -7.366837 9.189060e-11 -3.430804 -2.861741 -2.566877 True
Junction 2 -9.151651 2.676498e-15 -3.430830 -2.861752 -2.566883 True
Junction 3 -6.614107 6.269937e-09 -3.430815 -2.861745 -2.566879 True
Junction 4 -6.378744 2.249640e-08 -3.431901 -2.862225 -2.567135 True
First, feature engineering was conducted. Temporal
features such as year, month, day, hour, and day of
the week were created to capture cyclical patterns in
traffic, as shown in Table 2. Additionally, for
preparing the data with the LSTM model, a sliding
window approach was used to create sequences of
historical data. This approach allows the model to
capture more local patterns and learn efficiently.
Second, data cleaning was performed by detecting
and eliminating outlier data in the dataset to prevent
the models from misinterpreting the dataset due to
anomalous data points. Figure 1 depicts the detected
outliers, which do not represent normal road
conditions due to special events like accidents or road
closures, as the number of vehicles at the specific
time was typically large, showing congestion. When
these anomalies are eliminated, the data can represent
typical traffic patterns.
After the creation of temporal features, the
normalisation was performed to scale vehicle counts.
This would keep all data ranges consistent for better
and more stable model performance. Lastly, as seen
in Table 3, the Augmented Dickey-Fuller (ADF) test
was conducted to check for stationary in the vehicle
count data. The stationarity of data is critical for time
series models. It ensures that the data’s statistical
properties, such as the mean and variance, do not
change over time. If the stationary test showed that
the data were stationary (ADF test result is True),
then the data could be used for further modelling
directly. However, if the data were non-stationary
(ADF test result is False), differencing needs to be
applied on the data to remove any trends, making the
data stationary.
2.3 Models
This paper uses the following models to predict traffic
flow: RF, XGBoost, and LSTM.
RF is an ensemble learning method that builds
many decision trees and merges their results to make
predictions. This model is robust to overfitting and
can demonstrate the importance of different features
(Akhtar & Moridpour, 2021), which is vital for
understanding the contribution of different features in
the prediction.
XGBoost is an advanced tree-based gradient
boosting algorithm, which is well-known for its high
efficiency. It can handle complex interactions in
structured data and process data features in parallel.
Additionally, XGBoost has been known for its high
precision and accuracy. Supported by a gradient
boosting framework, the model reduces the error by
minimizing a loss function, such as MSE. This
iterative approach improves the model’s precision at
each iteration step, therefore, presents an enhanced
prediction ability of the model (Dong et al., 2018;
Wang & Fang, 2024). Thus, high computational
efficiency and precision make XGBoost a strong
choice for traffic flow prediction.
LSTM is a recurrent neural network (RNN) class
that works particularly well in time series prediction
applications. LSTM is able to capture long-term
dependencies and temporal features in time series
data, which are crucial for the accurate prediction of
traffic patterns in time series. Unlike typical RNN
networks that may struggle with the problem of
vanishing gradients, the LTSM can keep information
over more extended periods thanks to the internal
gating mechanisms. In addition, LSTM can learn the
data patterns itself without extra feature engineering,
which is often required for many machine learning
models (Ye et al., 2024). Therefore, these properties
of LSTM make it a powerful model for traffic
forecasting.
3 EXPERIMENT RESULTS
Cross-validation and hyperparameter tuning
techniques were applied prior to the performance
evaluation of the model. Firstly, cross-validation test
was performed to assess the models’ performance on
various sets of data to ensure their robustness.
Further, hyperparameter tuning was also conducted
by using the Python built-in function GridSearchCV
to fine-tune the hyperparameters of models for the
best model predictive accuracy.
Traffic Prediction Using LSTM, RF and XGBoost
269
3.1 Experiment Evaluation
It is necessary to establish some metrics in order to
evaluate the performance of the models. For instance,
RMSE, MAE, and R
2
may be chosen. RMSE could
present a general indicator, which is computed as the
root of the average squared difference between
predictions and actual values (Joaquim et al., 2015).
MAE is a metric used to calculate the average
absolute error/difference between predicted values
and actual values. This value is less sensitive to large
errors than the RMSE value (Joaquim et al., 2015). R
2
is a statistical measure that shows how well models
explain variance in the target variable (Jiang, 2022).
Collectively, these metrics offer a complete
understanding of the models in the prediction of
traffic patterns.
3.2 Results of Random Forest
Table 4: Performance Metrics of the Random Forest model.
RMSE MAE
𝑅
Junction 1 0.185797 0.136094 0.968583
Junction 2 0.099772 0.080631 0.854158
Junction 3 0.152084 0.114155 0.806105
Junction 4 0.096277 0.077159 0.550362
Table 4 shows the experiment result of the Random
Forest model at four different junctions. Junction 4
owns the smallest RMSE and MAE values, meaning
that the RF model had the most accurate prediction at
this junction. The highest 𝑅
value was achieved at
Junction 1, meaning that the model was able to
explain approximately 96.9% of the variance in the
target variable. Junction 4 has the lowest value of
0.55, so the model was struggling to capture the
variance.
(a) (b)
(c) (d)
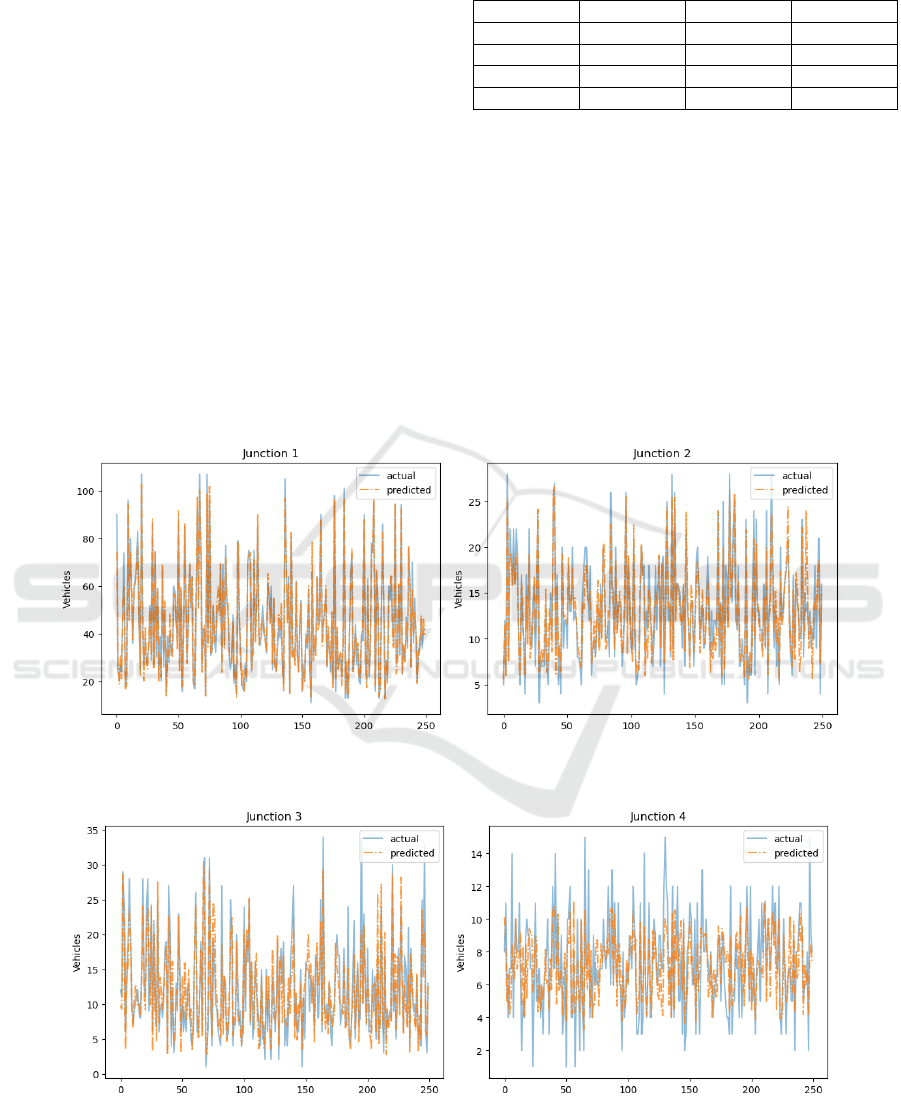
Figure 2: Actual vs. predicted values using Random Forest for 4 junctions. (a): Junction 1, (b): Junction 2, (c): Junction 3,
(d): Junction 4. (Photo/Picture credit: Original).
DAML 2024 - International Conference on Data Analysis and Machine Learning
270
The visualizations demonstrate the numerical
results in Figure 2. As suggested in Figure 2, Junction
1 had the largest RMSE, so plot (a) has more
unmatched patterns, and it captured the variance well.
This aligns with the high 𝑅
value observed in the
metrics table. Also, almost all predictions in the
Junction 4 plot closely fall in the actual value line, so
the RMSE for this junction is the lowest. However,
the model had more difficulty capturing traffic
patterns as the plot demonstrates an obvious
difference in the variances. The table and plots clearly
highlight where the model performed well while still
needing improvement. Junctions 1 and 2 were
accurately predicted, showing the model’s solid
predictive performance. However, the big difference
in variances for junction 4 suggests that the model
could be improved through further tuning or
additional feature engineering.
3.3 Results of XGBoost
Table 5: Performance of XGBoost model.
RMSE MAE
𝑹
𝟐
Junction 1 0.160097 0.118387 0.976673
Junction 2 0.096931 0.078455 0.862345
Junction 3 0.148890 0.111268 0.814165
Junction 4 0.097115 0.077715 0.542502
Table 5 shows that the model performed well at
junctions 1 and 2, with high 𝑅
values and low errors.
Similar to the RF model, the XGBoost model
struggled with junction 4, with the lowest 𝑅
value of
0.54. This means that it was also difficult to capture
the traffic patterns for the XGBoost model.
(a) (b)
(c) (d)
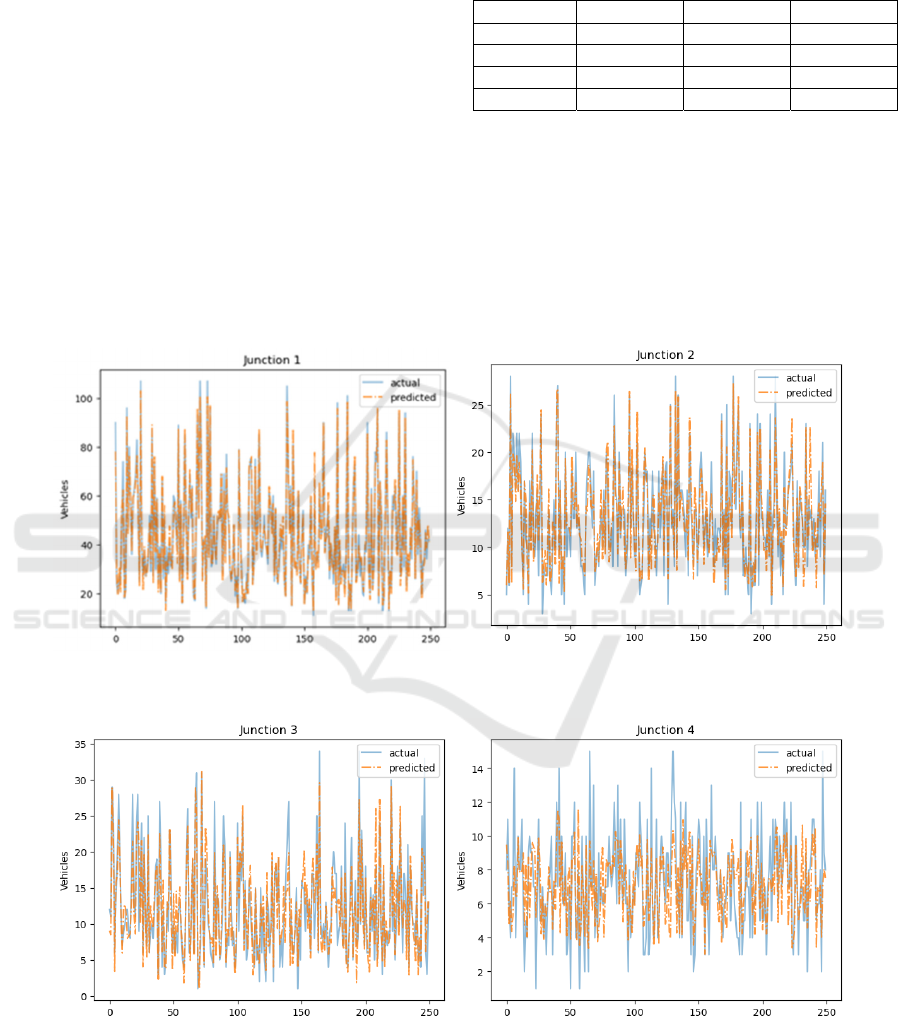
Figure 3: Actual vs. predicted values using XGBoost for 4 junctions. (a): Junction 1, (b): Junction 2, (c): Junction 3, (d):
Junction 4. (Photo/Picture credit: Original).
Traffic Prediction Using LSTM, RF and XGBoost
271
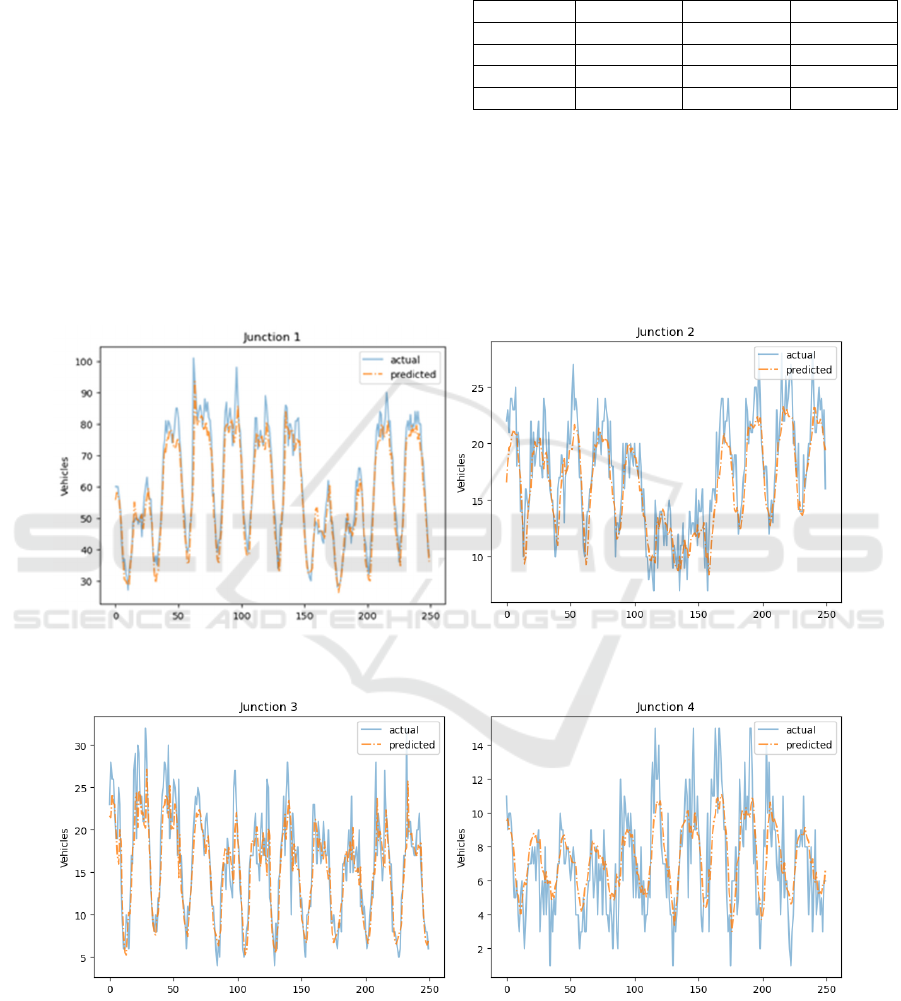
Figure 3 illustrates that the model functioned well
at 1 and 2 junctions, as the predicted vehicle counts
aligned well with the actual values. Junction 3 had
slightly more deviations, suggesting a lower 𝑅
value. The fourth junction showed an even more
significant deviation, indicating that the model did
not interpret the traffic forecasts well. Like the
Random Forest model, this model also needs more
analysis and adjustments to reduce the deviation for
junction 4 and to enhance the overall performance.
3.4 Results of LSTM
Table 6: Performance of LSTM model.
RMSE MAE
𝑅
Junction 1 0.410605 0.320683 0.842318
Junction 2 0.176028 0.143766 0.453334
Junction 3 0.171220 0.131704 0.767415
Junction 4 0.116788 0.091637 0.425882
As shown in Table 6, junction 1 had large prediction
errors compared to the other two models and a
relatively high 𝑅
value. Junctions 2 and 4 both have
a meagre 𝑅
value, suggesting the model did not fit
well with the traffic data. For junction 3, the model
performed relatively well with a moderate 𝑅
value
of 0.77 and relatively low RMSE and MAE.
(a) (b)
(c) (d)
Figure 4: Actual vs. predicted values using LSTM for 4 junctions. (a): Junction 1, (b): Junction 2, (c): Junction 3, (d): Junction
4. (Photo/Picture credit: Original).
DAML 2024 - International Conference on Data Analysis and Machine Learning
272
The first and third plots in Figure 4 show that the
predictions of these two junctions generally follow
the trend of the actual values with an apparent
deviation. The model had difficulty capturing the
patterns at both junctions 2, 4, as great deviations
were illustrated in the plots. The model was able to
capture some temporal dependencies, but it is clearly
not as competitive as the others, which may be due to
the lack of data and information.
3.5 Model Comparison
Table 7: The average results of experiment models.
RMSE MAE
𝑅
RF 0.133482 0.102010 0.794802
XGBoost 0.125758 0.096456 0.798921
LSTM 0.218660 0.171947 0.622237
It can be noticed from Table 7 that XGBoost
outperformed both LSTM and RF in terms of all three
metrics. It had the lowest errors on average across all
junctions - RMSE of 0.125758 and MAE of
0.096456. Also, it yielded the highest 𝑅
value of
0.798921, slightly higher compared to the Random
Forest model. Therefore, from these results, it appears
that the XGBoost model can accurately predict and
explain the variance in traffic data across various
junctions.
The RF model also performed very well, with
slightly lower values in all the key metrics. It
achieved an average RMSE of 0.133482, MAE of
0.096456 and 𝑅
of 0.794802. Additionally, the
model could provide the interpretation of the
importance of features, which is also an important
indicator for model development. Thus, this model is
also a powerful model for traffic prediction.
Although LSTM is a robust neural network that is
particularly suitable for time series prediction, it did
not perform as well as the other two models. The
LSTM had the lowest 𝑅
value of 0.622237, the
highest RMSE of 0.21866 and MAE of 0.171947. In
this context of traffic prediction, LSTM was less
accurate in predicting traffic counts, especially in
junctions 2 and 4, with shallow 𝑅
values. Therefore,
the model probably requires further tuning or
additional features and information to compete with
XGBoost and RF.
In summary, XGBoost is the best-performing
model overall. It has the most accurate prediction
results and can capture the variance in the traffic data.
These properties make this model the most reliable
and suitable choice for traffic prediction in this study.
4 LIMITATIONS
This study demonstrated the use of machine learning
models like XGBoost in predicting traffic. However,
there are some limitations during the project that
should be noted. First, there is a lack of information
in the dataset used. The dataset only contained a few
features: the datetime and target variable – vehicle
count across various junctions, while more factors
should be considered, such as weather conditions,
road closures, public events, holiday. These might be
the reasons that affect the models to explain variance
in traffic data fully. Therefore, expanding the dataset
and merging additional features could enhance the
models’ performance.
Another limitation is the performance shown by
the LSTM model, which is a preferred choice when
dealing with time series data. LSTM performed
poorly in this context, which may be attributed to
insufficient tuning or data analysis and preprocessing
specific to the needs of LSTM.
Additionally, the models were trained on data
collected from a specific city. The generalizability of
the findings to other cities, locations with different
traffic patterns, and population numbers was not
tested. Thus, including other locations in the dataset
could help the models understand traffic data more
comprehensively.
Lastly, many Machine Learning models, such as
XGBoost, are black-box models, which are inherently
complex, so making it difficult to interpret the results
and understand how the models obtain the
predictions. This “black-box” nature can be a
significant defect, especially in real-time traffic
management systems, where interpretability is
crucial. Adopting methods like SHAP (Shapley
Additive exPlanations) values could help to address
this issue, as they can provide a comprehensive
understanding of feature importance, thus
determining which factors contribute the most to the
model’s decision-making process.
5 CONCLUSIONS
This paper primarily explored and analyzed the uses
of machine learning models – LSTM, RF, and
XGBoost in the prediction of traffic patterns at
different junctions in a city. The results showed that
XGBoost is the most effective and suitable model for
this context since it held the minimum prediction
errors and the maximum 𝑅
values among all the
models studied. RF also excelled in this task, with
Traffic Prediction Using LSTM, RF and XGBoost
273

slightly lower values in the key metrics than
XGBoost. At the same time, the LSTM model,
despite its theoretical strength in handling time series
data, was not as competitive as the other models.
Hence, the LSTM model requires further tuning or
other features to enhance its performance. These
models’ ability to capture traffic patterns makes them
feasible choices for real-time traffic management.
The XGBoost model can achieve more accurate
short-term forecasts, which will manage the traffic
flow, help reduce traffic congestion and enhance
public safety. However, several limitations were also
identified within this study, such as insufficient
features and geographical limitations. Future research
could also involve fine-tuning the LSTM for
improved performance and training models on larger
datasets with a wider variety of features and regions.
By tackling these problems, it would be feasible to
create more reliable and broadly applicable models,
which would offer additional insights into creating a
more effective transportation system.
REFERENCES
Akhtar, M., Moridpour, S., 2021. A Review of Traffic
Congestion Prediction Using Artificial Intelligence.
Journal of Advanced Transportation, 2021, e8878011.
https://doi.org/10.1155/2021/8878011.
Dong, X., Lei, T., Jin, S., Hou, Z., 2018. Short-Term Traffic
Flow Prediction Based on XGBoost. 2018 IEEE 7th
Data Driven Control and Learning Systems Conference
(DDCLS). https://doi.org/10.1109/ddcls.2018.8516114
Fedesoriano., 2021. Traffic Prediction Dataset. Www.
kaggle.com. https://www.kaggle.com/datasets/
fedesoriano/traffic-prediction-dataset.
Hong, H., Huang, W., Xing, X., Zhou, X., Lu, H., Bian, K.,
Xie, K., 2015. Hybrid Multi-metric K-Nearest
Neighbor Regression for Traffic Flow Prediction.
https://doi.org/10.1109/itsc.2015.365.
Jiang, W., 2022. Cellular traffic prediction with machine
learning: A survey. ScienceDirect, 201.
Joaquim, B., Araujo, M., Rossetti, F., 2015. Short-term
real-time traffic prediction methods: a survey.
Portuguese National Funding Agency for Science,
Research and Technology (RCAAP Project by FCT).
https://doi.org/10.1109/mtits.2015.7223248.
Medina-Salgado, B., Sánchez-DelaCruz, E., Pozos-Parra,
P., Sierra, J. E., 2022. Urban traffic flow prediction
techniques: a review. Sustainable Computing:
Informatics and Systems, 35, 100739.
https://doi.org/10. 1016/j.suscom.2022.100739.
Vencataya, L., Pudaruth, S., Dirpal, G., Narain, V., 2018.
Assessing the Causes & Impacts of Traffic Congestion
on the Society, Economy and Individual: A Case of
Mauritius as an Emerging Economy. Studies in
Business and Economics, 13(3), 230–242. https://doi.
org /10.2478/sbe-2018-0045.
Wang, X., Fang, F., 2024. Short-Term Traffic Flow
Prediction Based on Wavelet Analysis and XGBoost.
International Journal of Transportation Engineering and
Technology, 10(1), 15–24. https://doi.org/10.11648/
j.ijtet.20241001.12.
Ye, B.-L., Zhang, M., Li, L., Liu, C., Wu, W., 2024. A
Survey of Traffic Flow Prediction Methods Based on
Long Short-Term Memory Networks. IEEE Intelligent
Transportation Systems Magazine, 2–27.
https://doi.org/ 10.1109/mits.2024.3400679.
DAML 2024 - International Conference on Data Analysis and Machine Learning
274
