
3D Human Body Model Reconstruction Algorithm Based on
Multi-View Synchronized Video Sequences
Yidong Wu
a
Department of Computing, Harbin Institute of Technology, Harbin, China
Keywords: Computer Vision, Deep Learning, Multi-View Driven, 3D Human Body Model Reconstruction.
Abstract: As an important topic in the field of computer vision, 3D human reconstruction has a wide range of
applications in the fields of film and television entertainment, sports and medicine. Traditional 3D human
reconstruction methods often require professional equipment and clothing for technical support, and the
process is very cumbersome and has great limitations. In recent years, with the development of deep learning,
the method of human reconstruction using deep learning has achieved great success. Based on this
background, this paper introduces a 3D human reconstruction algorithm based on multi-view synchronized
video sequences, which can improve the shortcomings of traditional methods. Specifically, this paper
reprojects the key points on the 3D human model back to the 2D plane under multiple perspectives, and uses
the key points obtained by 2D human posture detection to optimize the reprojected key points, and finally
obtains the body shape and posture parameters of the 3D human model. After comparative experiments, the
method of this paper has achieved good accuracy and efficiency.
1 INTRODUCTION
At present, with the rapid development of augmented
reality (AR) and virtual reality (VR) technologies, the
metaverse (Wang, et al., 2023) has attracted more and
more attention. As a digital space based on the virtual
world, the metaverse can effectively simulate the
physical laws and human activities in the real world.
In this artificially created virtual world, users can
interact immersively through their own avatars, such
as engaging in social activities, work production, etc.
At present, one of the key research directions of the
metaverse is how to obtain the user's human posture
in real time and reconstruct their avatars in the
metaverse at the same time. This technology is also
called three-dimensional human body reconstruction
technology. As a key research topic in computer
vision and computer graphics, three-dimensional
human body reconstruction technology has been
widely used in game modeling, medical imaging, film
and television motion capture, identity recognition
and other fields.
Traditional three-dimensional human body
reconstruction technologies include motion capture
methods based on optical marker capture (Siaw, Han,
a
https://orcid.org/0009-0008-6060-2165
and Wong, 2023) and inertial capture (He, Zheng,
Zhu, et al., 2022). The method based on optical
marker capture is to capture the marker points
attached to different positions of the human body
through a multi-view camera, so as to obtain the
positions of each joint of the human body and perform
human body modeling. The method based on inertial
capture is to equip accelerometers, gyroscopes and
other measuring instruments at various positions of
the human body to capture the speed, acceleration,
etc. of different parts of the human body, and finally
calculate the human body model. Although these
methods are feasible, they require professional
equipment, and the process is cumbersome and has
great limitations.
The main research purpose of this paper is to
propose a multi-perspective jointly driven 3D human
body reconstruction technology. This multi-
perspective jointly driven 3D human body
reconstruction technology no longer relies on
professional wearable equipment, can effectively
solve the problems existing in traditional methods,
and provides a simpler and more efficient 3D human
body reconstruction method, which has strong
practical significance.
214
Wu and Y.
3D Human Body Model Reconstruction Algorithm Based on Multi-View Synchronized Video Sequences.
DOI: 10.5220/0013512800004619
In Proceedings of the 2nd International Conference on Data Analysis and Machine Learning (DAML 2024), pages 214-220
ISBN: 978-989-758-754-2
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
2 LITERATURE REVIEW
Two-dimensional human pose detection can be
divided into two categories: top-down and bottom-up.
Top-down methods, such as the AlphaPose algorithm
(Fang, Li, Tang, et al., 2022), first use a human
detector (REN, HE, Girshick, et al., 2015)) to detect
all the human bodies in the image, and then use a
neural network to estimate the human pose for each
individual human body. Bottom-up methods, such as
the OpenPose algorithm (Wu, Tang, Xiong, et al.,
2022), have a network structure divided into many
layers. The first layer is used to predict the joint point
heat map and the limb association confidence map,
and each subsequent layer will gradually optimize the
connection between the joints and limbs until all
human skeletons are assembled. In addition, many
detection methods have improved OpenPose, such as
the OpenPifPaf (Kreiss, Bertoni, and Alahi, 2022)
multi-person pose estimation method.
In order to simplify the human body model,
people have proposed the concept of parametric
human body model, that is, using a template and
different parameters to generate a variety of human
body models, such as the SMPL (Song, Yoon, Cho,
et al., 2023) model proposed by Loper in 2015, which
is a model based on linear mixed skinning drive.
Later, the face parameterized model FLAME (Athar,
Shu, and Samaras, 2023) and the hand parameterized
model MANO (Potamias, Ploumpis, Moschoglou, et
al., 2023) were also proposed one after another. In
2019, Pavlakos et al. improved on SMPL, combined
with FLAME and MANO models, and constructed a
full-body human model SMPL-X (Pavlakos, et al.,
2019). Compared with SMPL, which has simpler
parameters, the SMPL-X model can not only adjust
the height, weight and posture of the human body, but
also make separate adjustments for facial expressions
and hand movements.
For single-person human model reconstruction,
SMPLify (Hassan, Choutas, Tzionas, et al., 2019)
designed a reconstruction method based on joint
detection and posture prior for the SMPL model.
After the emergence of the SMPL-X model,
SMPLify-X (Pavlakos, et al., 2019) also came into
being. Compared with SMPLify, it relearned the
action prior using variational autoencoders (VAE)
and designed new model penetration penalties,
thereby achieving better reconstruction results. In
2018, Kanazawa et al. proposed the HMR (Human
Mesh Recovery) (Moon, Choi, and Lee, 2022)
method, which realized an end-to-end deep learning
network, directly regressed a three-dimensional
human model from a single image, and the training
process did not require supervision of three-
dimensional key points of the human body.
Many current studies often sacrifice a certain
degree of accuracy in order to improve reconstruction
speed, ignoring the error accumulation caused by the
two processes of two-dimensional posture detection
and three-dimensional reconstruction, resulting in
jitter in the reconstructed human body model. The
main research content of this paper is to use the key
point coordinates obtained by two-dimensional
posture detection as the main reference based on
multi-view video information, and use the
information obtained by triangulation of key points to
initialize the human body model, reconstruct the
three-dimensional human body model by optimizing
the parameters of the human body model, and
optimize the jitter problem of the human body model,
and finally maximize the efficiency of human body
reconstruction without sacrificing accuracy.
3 METHOD
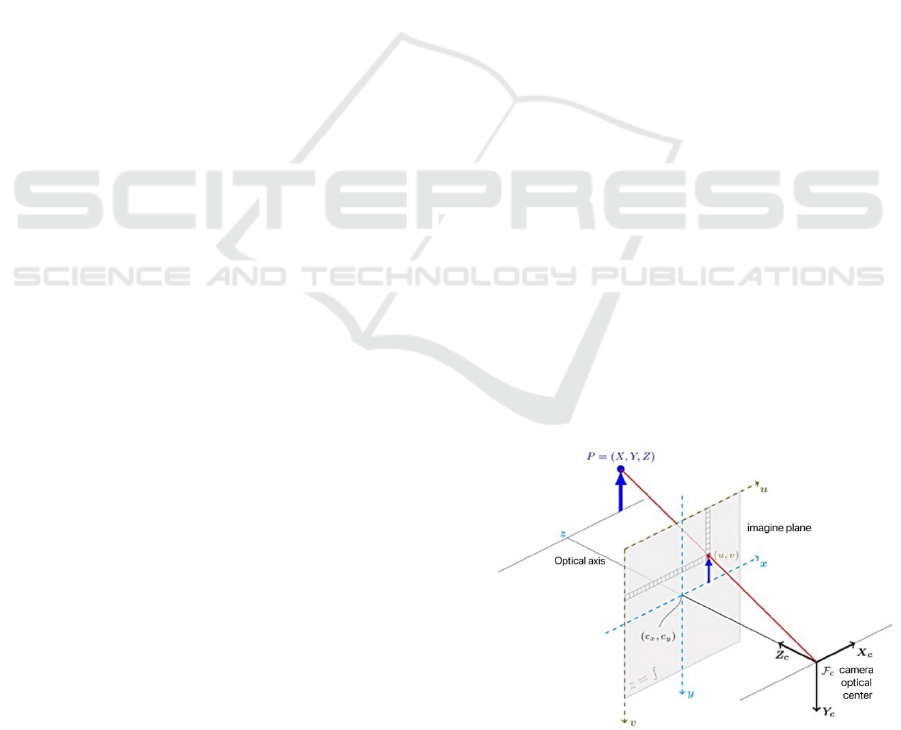
3.1 Camera Model
The camera model used in this paper is the pinhole
camera model, which contains four coordinate
systems: world coordinate system, camera coordinate
system, image coordinate system, and pixel
coordinate system. In this model, a point in the real
world is transformed into a point in the image through
the conversion between these four coordinate
systems. Next, this paper will discuss the method of
projecting point P from its coordinates (X, Y, Z) in
the world coordinate system to its coordinates (u, v)
in the pixel coordinate system. The pinhole camera
model is shown in Figure 1.
Figure 1: Pinhole camera model. (Photo/Picture credit :
Original )
3D Human Body Model Reconstruction Algorithm Based on Multi-View Synchronized Video Sequences
215
Given the coordinates (X, Y, Z) of point P in the
world coordinate system, the formula for projecting
this coordinate to the coordinates (u, v) in its pixel
coordinate system is:
𝑍𝑐
𝑢
𝑣
1
=
⎣
⎢
⎢
⎢
⎡
1
𝑑𝑥
0𝑢
0
1
𝑑𝑦
𝑣
001
⎦
⎥
⎥
⎥
⎤
𝑓00
0𝑓0
001
0
0
0
𝑅𝑡
0
×
1
𝑋
𝑌
𝑍
1
=
𝑓
0𝑢
0𝑓
𝑣
001
0
0
0
𝑅𝑡
0
×
1
𝑋
𝑌
𝑍
1
1
Among them,
𝑓
0𝑢
0𝑓
𝑣
001
0
0
0
is called the
intrinsic parameter matrix, and
𝑅𝑡
0
×
1
is called
the extrinsic parameter matrix. The intrinsic
parameter matrix is the parameter that describes the
internal properties of the camera, which includes
information such as focal length, principal point
coordinates, and distortion coefficients. For a specific
camera, these intrinsic parameters are usually fixed
and do not change with time or space. The extrinsic
parameter matrix is used to describe the pose
parameters of the camera in the world coordinate
system, which changes with the position and pose of
the camera in space.
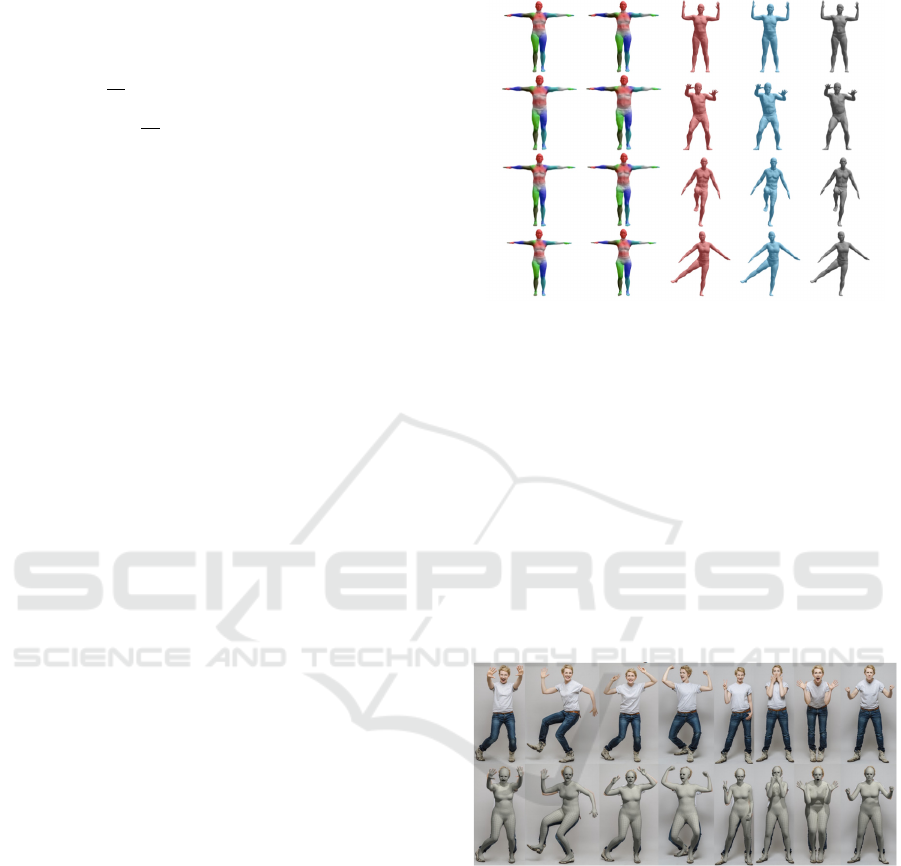
3.2 Parametric Human Body Model
In the SMPL model, the mesh model of a 3D human
body model consists of 𝑁=6890 vertices, including
K=23 human joints, and the driving relationship of
each joint to each mesh vertex is described by the
Blend Weight matrix ω6890 × 24 . The author
uses PCA (Principal Component Analysis) to reduce
the dimension of a large number of parameters and
extracts some parameters that have the greatest
impact on the body shape and movement of the
human body model, ultimately achieving the purpose
of simplifying the number of parameters. For body
shape, the parameter β∈ℝ
is defined to describe
height, weight, and thinness. For posture, the
parameter θ∈ℝ
is defined, and the axis angle
is used to represent the rotation of the joint relative to
the initial posture. The first three parameters control
the rotation posture of the root orientation, and the
remaining three parameters each describe the rotation
axis and angle of a joint. After obtaining a set of
determined body shape parameters β and posture
parameters θ, the human body model can be driven
using linear blend skinning (LBS) (Khamis, Taylor,
Shotton, et al., 2015). A schematic diagram of the
SMPL human body model is shown in Figure 2.
Figure 2: SMPL human body model (Loper, 2024).
The model used in this paper is the human body
model SMPL-X (SMPL eXpressive) (Hassan,
Choutas, Tzionas, et al., 2019), which was improved
by Pavlakos et al. in 2019 based on the SMPL model.
It combines the original SMPL model of the body, the
MANO (hand Model with Articulated and Non-rigid
deformations) (Potamias, Ploumpis, Moschoglou,
2023) model of the hand, and the FLAME (Faces
Learned with an Articulated Model and Expressions)
(Athar, Shu, and Samaras, 2023) model of the head to
describe the human body with a unified model. A
schematic diagram of the SMPL-X human body
model is shown in Figure 3.
Figure 3: SMPL-X human body model (Pavlakos, et al.,
2019).
The SMPL-X model uses a standard LBS-driven
human body model. The mesh model of a 3D human
body model consists of 𝑁=10475 vertices and
contains 𝐾=54 key points (including joints, chin,
fingers, eyes, etc.). The SMPL-X model can be
expressed as the following function:
M
θ,β,ψ
:ℝ
|
|
×
|
|
×
|
|
→ℝ
2
Among them, 𝜃∈ℝ
is the posture
parameter, which includes three types of parameters:
DAML 2024 - International Conference on Data Analysis and Machine Learning
216
chin parameters, finger parameters, and parameters of
other body joints. And 𝛽∈ℝ
is the body shape
parameter as in the SMPL model. The new 𝜓∈ℝ
is the facial expression parameter, which is used to
represent the human expression after dimensionality
reduction. After PCA dimensionality reduction, the
author reduced the total number of model parameters
of SMPL-X to 119, of which 10 are body shape
parameters, 10 are facial expression parameters, 24
are hand parameters used to represent finger
movements, and the remaining 75 are body posture
parameters used to represent the rotation of the
remaining key points (body, chin, eyes, etc.).
3.3 2D Human Posture Detection
Before reconstructing and optimizing the three-
dimensional model, it is first necessary to perform
two-dimensional human posture detection on each
frame image from different perspectives in the video
and extract the two-dimensional human posture
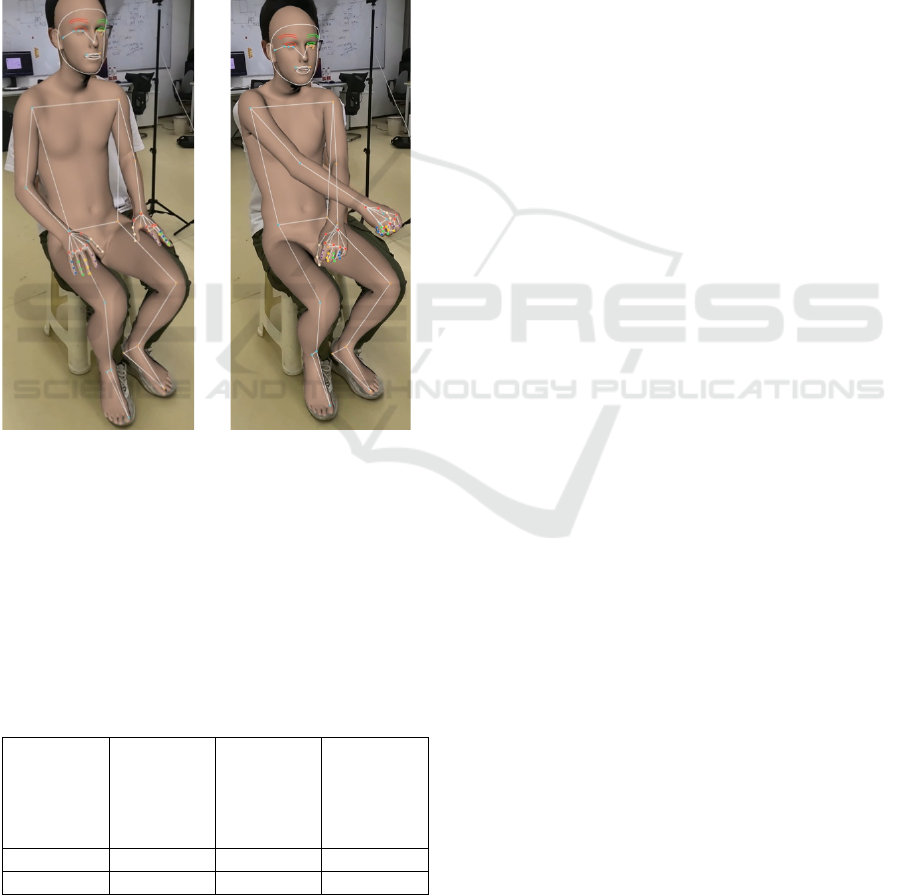
information at each perspective. The two-
dimensional detection method used in this paper is the
MediaPipe Holistic method (Huu, Hong, Dang, et al.,
2023) released by Google engineer Grishchenko in
2020. A new Pipeline is proposed in MediaPipe
Holistic, which successfully optimizes the detection
components of the face, hands, and body, and
completes the semantic level combination between
the three components, so that it can complete the
synchronous detection of human face, hands, and
posture in real time. The detection results output by
MediaPipe Holistic includes 33 human posture key
points, 21 hand movement key points for each hand,
and 468 facial expression key points, which can
provide comprehensive and sufficient data support
for the successful execution of subsequent research
and analysis work. Figure 4 shows an example of
MediaPipe Holistic human pose detection.
Figure 4: Example of MediaPipe Holistic human pose
detection (Kim, Baek, 2023).
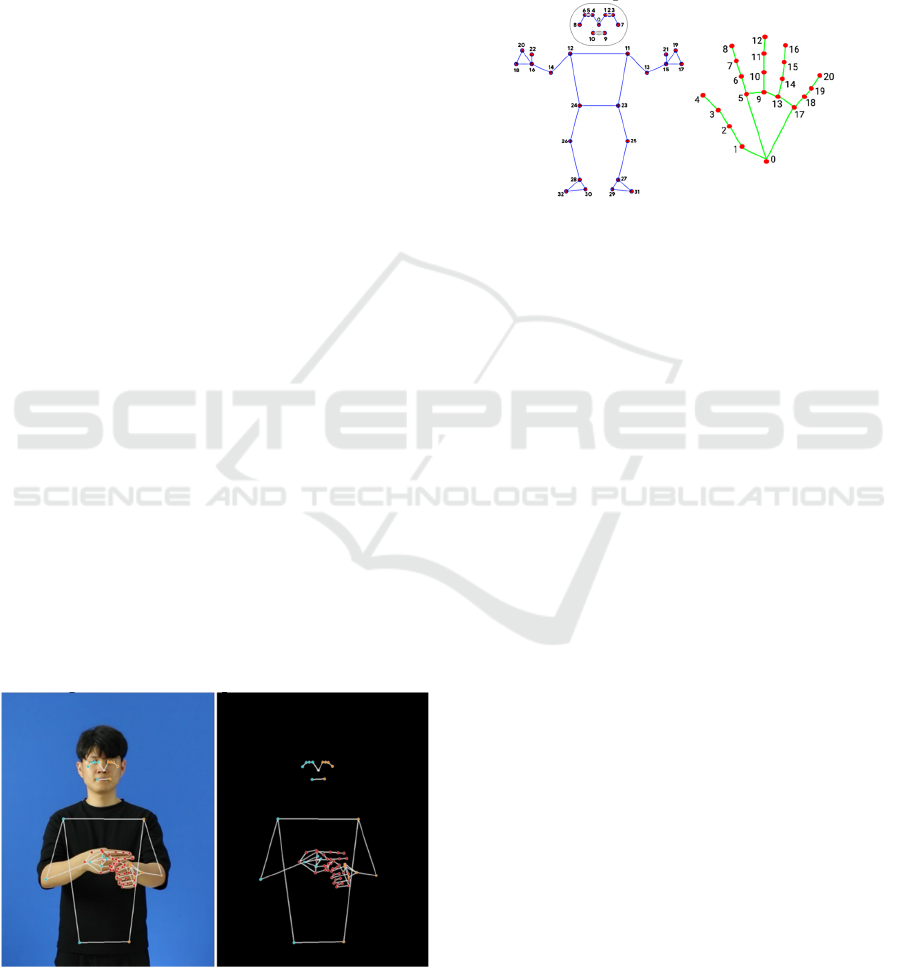
After using MediaPipe Holistic to extract the 2D
human posture key points of each frame at each
viewpoint, in order to use it to reconstruct the SMPL-
X model, it is also necessary to find the
correspondence between the SMPL-X key points and
the key points output by MediaPipe Holistic to
complete the mapping between the two models.
Figure 5 shows key point annotation of body and
hands in MediaPipe Holistic.
Figure 5: Key point annotation of body and hands in
MediaPipe Holistic (Kim, Baek, 2023).
3.4 Residual Function
3.4.1 Residual Term For Body
At a specific viewing angle, the residual of the body
part is calculated by the previously obtained
reprojected key point 2D coordinates 𝑃
and the key
point 2D coordinates 𝑃
obtained by detection. The
L2 norm is calculated for 𝑃
𝑃
, and different
weights ω
are designed for different key points
to optimize the reconstruction effect.
𝑑𝑖𝑠
=ω
×L2.norm𝑃
𝑃
3
Because at a specific viewing angle, the
confidence C
(the probability that the error between
the calibrated key point and its corresponding real key
point on the human body is small) of each key point
p
obtained by 2D human posture detection is not the
same: some key points have a higher confidence, and
these key points can be used for fitting optimization;
while some key points have a lower confidence, that
is, these key points are likely to be inaccurate and
have a lower reference value, so it is not accurate to
use 𝑑𝑖𝑠
as the value of the residual function. In a
gesture to avoid this problem, this paper only selects
key points with C
0.5 (C
is the confidence) for
residual function calculation. In summary, the
residual function is as follows (where M is the
number of viewing angles):
3D Human Body Model Reconstruction Algorithm Based on Multi-View Synchronized Video Sequences
217

ℒ
=
1
M
𝑑𝑖𝑠
.
4
3.4.2 Residual Term For Hand
By taking the L2 norm between the reprojected key
points and the key points obtained by detection, the
residual term of the hand can also be obtained.
However, unlike the calculation of the residual
function for the body, the calculation of the residual
function for the hand does not need to consider the
confidence C
. This is because MediaPipe Holistic
detection will directly discard the key points of the
hand image with insufficient confidence. Therefore,
all hand key points are high confidence. In summary,
the residual function of all views of the two hands is
averaged to obtain the residual function:
ℒ
=
1
2M
𝑑𝑖𝑠
5
3.4.3 Residual Term For Face
This paper uses 478 specific vertices of the human
body mesh model for fitting optimization. Since all
key points obtained by face detection are also high-
confidence key points, there is no need to consider the
confidence C
. The residual function of all views is
averaged to obtain the facial residual term:
ℒ
=
1
M
𝑑𝑖𝑠
6
3.4.4 Regularization Term
Since direct training may lead to the problem of
excessively large parameters, making the model
susceptible to noise and ultimately leading to
inaccurate fitting results, this paper uses a
combination of L1 regularization and L2
regularization to constrain and penalize the parameter
size.
Combining the above three residual terms, the
final residual function expression is as
follows:
ℒ
=𝜔
×ℒ
+𝜔
×ℒ
+
𝜔
_
×ℒ
+𝜔
×ℒ
7
4 EXPERIMENT
4.1 Dataet
The CMU Panoptic Dataset is a series of datasets
released between August 2016 and April 2019. The
dataset contains 65 video sequences (5.5 hours) and
1.5 million 3D skeletons (Joo, Liu, Tan, et al., 2015).
This paper selects the video sequences of the single-
person part as the training dataset.
The parameters for each set of video sequences
are as follows:
(1) 480 VGA cameras with a resolution of 640 ×
480, capturing at 25 fps, all synchronized using a
hardware clock (Joo, Liu, Tan, et al., 2015).
(2) 31 HD cameras with a resolution of 1920 ×
1080, capturing at 30 fps, also synchronized using a
hardware clock and time-aligned with the VGA
cameras (Joo, Liu, Tan, et al., 2015).
(3) 10 Kinect Ⅱ sensors, providing 1920 × 1080
(RGB) and 512 × 424 (depth) resolutions, capturing
at 30 fps, synchronized both among themselves and
with the other sensors (Joo, Liu, Tan, et al., 2015).
(4) 5 DLP projectors, synchronized with the HD
cameras (Joo, Liu, Tan, et al., 2015).
The experiment uses the videos of 8 viewpoints in
the above dataset as the final training dataset input.
To ensure the consistency of the training data, all
videos of 8 viewpoints are synchronized. To prevent
overfitting, the upper limit of the training rounds of
each frame model is set to 15 rounds.
4.2 Evaluation Indicators
This paper selects the values of mean joint position
error (MPJPE, Mean Per Joint Position Error) and
reconstruction error (PA-MPJPE, Procrustes Aligned
MPJPE) as the evaluation indicators of the
experiment. The accuracy of the algorithm is judged
by calculating the mean joint position error (MPJPE,
Mean Per Joint Position Error) and reconstruction
error (PA-MPJPE, Procrustes Aligned MPJPE)
between the key point coordinates of the fitted 3D
human model and the real coordinates of the key
points given in the data set, and comparing them with
the full-body motion capture method published by
Zhang (Zhang, Li, An, et al., 2021).
On this basis, this experiment also statistically
analyzes the 3D human reconstruction speed of the
algorithm and evaluates the efficiency of the
algorithm based on this indicator.
DAML 2024 - International Conference on Data Analysis and Machine Learning
218
4.3 Result
According to the method in the above experiment, the
3D human body reconstruction was performed on
several single-person action video sequences in the
CMU panoramic data set. The final 3D human body
reconstruction model has a very small visual jitter that
is almost imperceptible to the naked eye. After the
model training is completed, it is tested using a test
set, which consists of multi-view synchronized video
sequences collected under similar conditions. The 3D
human body reconstruction effect of the test set is
shown in Figure 6 below.
Figure 6: 3D reconstruction effect of the test set.
(Photo/Picture credit: Original)
From a data perspective, the MPJPE, PA-MPJPE,
and reconstruction speed collected by the algorithm
described in this paper are compared with the
corresponding indicators in the full-body motion
capture method published by Zhang (Zhang, Li, An,
et al., 2021). The final experimental results are shown
in Table 1:
Table 1 experimental results.
method MPJPE(
mm)
PA-MPJPE
(mm)
Recon-
struction
speed
(minutes/f-
rame)
This paper 24.10 19.83 0.59
Zhang 24.38 20.06 0.95
Comparing the experimental results, the MPJPE
of this paper's method is reduced by about 1.15% and
the PA-MPJPE is reduced by about 1.12% compared
with Zhang's full-body motion capture method.
Therefore, the human body model reconstructed by
this paper's method is slightly more accurate than
Zhang's method. In addition, this paper's method has
a huge improvement in the reconstruction speed of
the model, which is increased by about 60%.
In summary, the 3D human body reconstruction
algorithm proposed in this paper has achieved
improvements in both accuracy and efficiency.
5 CONCLUSION
This paper studies the pinhole camera model, 2D
human pose detection, uses the MediaPipe Holistic
method, adopts the SMPL-X model, and finally
obtains an algorithm for reconstructing a 3D human
model from synchronized 2D human pose video
sequences from various angles through deep learning.
In addition, this paper adds restrictions to the
parameters of the human model, reduces error
accumulation by adjusting the relationship between
the residual function and the parameter optimization,
and effectively suppresses the instability of the
model. The experimental results verify that these
technical improvements have greatly improved the
stability and reconstruction effect of the model, and
have achieved good results in both accuracy and
efficiency.
From a visual perspective, although the jitter
observable to the naked eye is extremely subtle and
almost imperceptible, these jitters may still need to be
further optimized in extreme application scenarios.
However, under the existing experimental conditions
and test sets, the method in this paper has been able
to achieve high visual stability and reconstruction
accuracy.
In future research, it is possible to consider further
reducing possible jitters by improving the details of
the model and improving the adaptability of the
model in more complex scenarios. In addition, the
versatility and extensibility of the algorithm can also
be further verified by introducing more different
types of test sets to evaluate its performance in
different application scenarios.
REFERENCES
Athar, S., Shu, Z. and Samaras, D., 2023. FLAME-in-
NeRF: Neural control of Radiance Fields for Free View
Face Animation. 2023 IEEE 17th International
Conference on Automatic Face and Gesture
3D Human Body Model Reconstruction Algorithm Based on Multi-View Synchronized Video Sequences
219

Recognition (FG), Waikoloa Beach, HI, USA, pp. 1-8,
doi: 10.1109/FG57933.2023.10042553.
Fang, H. S., Li, J., Tang, H., et al., 2022. Alphapose:
Whole-body regional multi-person pose estimation and
tracking in real-time. IEEE Transactions on Pattern
Analysis and Machine Intelligence: 7157-7173.
Hassan, M., Choutas, V., Tzionas, D. and Black, M., 2019.
Resolving 3D Human Pose Ambiguities With 3D Scene
Constraints. 2019 IEEE/CVF International Conference
on Computer Vision (ICCV), Seoul, Korea (South), pp.
2282-2292, doi: 10.1109/ICCV.2019. 00237.
He, Q., Zheng, Z., Zhu, X., Zhang, H., Su, Y. and Xu, X.,
2022. Design and Implementation of Low-Cost Inertial
Sensor-Based Human Motion Capture System. 2022
International Conference on Cyber-Physical Social
Intelligence (ICCSI), Nanjing, China, pp. 664-669, doi:
10.1109/ICCSI55536.2022.9970563.
Huu, P. N., Hong, P. D. L., Dang, D. D., Quoc, B. V., Bao,
C. N. L. and Minh, Q. T., 2023. Proposing Hand
Gesture Recognition System Using MediaPipe Holistic
and LSTM. 2023 International Conference on
Advanced Technologies for Communications (ATC),
Da Nang, Vietnam, pp. 433-438, doi:
10.1109/ATC58710.2023.10318885.
Joo, H., Liu, H., Tan, L., et al., 2015. Panoptic studio: A
massively multiview system for social motion capture.
Proceedings of the IEEE International Conference on
Computer Vision. 3334-3342.
Khamis, S., Taylor, J., Shotton, J., Keskin, C., Izadi, S. and
Fitzgibbon, A., 2015. Learning an efficient model of
hand shape variation from depth images. 2015 IEEE
Conference on Computer Vision and Pattern
Recognition (CVPR), Boston, MA, USA, pp. 2540-
2548, doi: 10.1109/CVPR.2015.7298869.
Kim, H., Baek, S. W., 2023. Implementation of wearable
glove for sign language expression based on deep
learning. Microsystem Technologies. 29. 1-17.
10.1007/s00542-023-05454-5.
Kreiss, S., Bertoni, L. and Alahi, A., 2022. OpenPifPaf:
Composite Fields for Semantic Keypoint Detection and
Spatio-Temporal Association. in IEEE Transactions on
Intelligent Transportation Systems, vol. 23, no. 8, pp.
13498-13511, doi: 10.1109/TITS.2021.3124981.
Loper, M., 2024. SMPL: A Skinned Multi-Person Linear
Model. SMPL Project Homepage. Available:
https://smpl.is.tue.mpg.de/. Accessed September 16,
2024.
Moon, G., Choi, H. and Lee, K. M., 2022. NeuralAnnot:
Neural Annotator for 3D Human Mesh Training Sets.
2022 IEEE/CVF Conference on Computer Vision and
Pattern Recognition Workshops (CVPRW), New
Orleans, LA, USA, pp. 2298-2306, doi:
10.1109/CVPRW56347.2022.00256.
Pavlakos, G., et al., 2019. Expressive Body Capture: 3D
Hands, Face, and Body From a Single Image. 2019
IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR), Long Beach, CA, USA,
pp. 10967-10977, doi: 10.1109/CVPR.2019.01123.
Potamias, R. A., Ploumpis, S., Moschoglou, S.,
Triantafyllou, V. and Zafeiriou, S., 2023. Handy:
Towards a High Fidelity 3D Hand Shape and
Appearance Model. 2023 IEEE/CVF Conference on
Computer Vision and Pattern Recognition (CVPR),
Vancouver, BC, Canada, pp. 4670-4680, doi:
10.1109/CVPR52729.2023.00453.
Ren, S., He, K., Girshick, R. B., et al., 2015. Faster R-CNN:
towards real-time object detection with region proposal
networks. Computing Research Repository,
abs/1506.01497. http://arxiv.org/abs/1506.01497
Siaw, T. U., Han, Y. C. and Wong, K. I., 2023. A Low-Cost
Marker-Based Optical Motion Capture System to
Validate Inertial Measurement Units. in IEEE Sensors
Letters, vol. 7, no. 2, pp. 1-4, Art no. 5500604, doi:
10.1109/LSENS.2023.3239360.
Song, H., Yoon, B., Cho, W. and Woo, W., 2023. RC-
SMPL: Real-time Cumulative SMPL-based Avatar
Body Generation. 2023 IEEE International Symposium
on Mixed and Augmented Reality (ISMAR), Sydney,
Australia, pp. 89-98, doi:
10.1109/ISMAR59233.2023.00023.
Wang, Y. et al., 2023. A Survey on Metaverse:
Fundamentals, Security, and Privacy. in IEEE
Communications Surveys & Tutorials, vol. 25, no. 1,
pp. 319-352, doi: 10.1109/COMST.2022.3202047.
Wu, E. Q., Tang, Z. -R., Xiong, P., Wei, C. -F., Song, A.
and Zhu, L. -M., 2022. ROpenPose: A Rapider
OpenPose Model for Astronaut Operation Attitude
Detection. in IEEE Transactions on Industrial
Electronics, vol. 69, no. 1, pp. 1043-1052, doi:
10.1109/TIE.2020.3048285.
Zhang, Y., Li, Z., An, L., et al., 2021. Lightweight multi-
person total motion capture using sparse multi-view
cameras. Proceedings of the IEEE/CVF International
Conference on Computer Vision. 5560-5569.
DAML 2024 - International Conference on Data Analysis and Machine Learning
220
