
Design and Implementation of a Humanoid Firefighter Robot with
Real-Time Monitoring and Firefighting Applications
Shivam Kumar
a
, Paras Singh
b
, Anjali Jain
c
and Neelam Verma
d
ASET, Amity University Noida, Sector 125, Noida, India
Keywords: BT- Bluetooth, RC – Remote Control, FPV– First Person View, ESP – Espressif Systems, RPM – Revolutions
per Minute.
Abstract: In this paper, a mobile phone-controlled humanoid firefighter robot, with a Bluetooth speaker for
announcements, and a camera for real-time monitoring is developed. The robot is designed to enhance
firefighting efforts, particularly in environments that are hazardous or inaccessible to human firefighters. The
robot can be remotely controlled via a mobile phone, utilizing Bluetooth connectivity to ensure reliable
communication and maneuverability, enabling it to operate in intense fire conditions. The integrated BT
speaker allows for critical announcements and communication during firefighting operations, enhancing
coordination and safety. Equipped with a water delivery system, the robot can actively extinguish fires. The
onboard camera provides a live feed to the operator, facilitating precise navigation and targeted firefighting.
This robot aims to significantly improve the efficiency and safety of firefighting operations, providing a robust
solution for tackling fires in challenging scenarios.
1
INTRODUCTION
One of the most hazardous and potentially life-
threatening problems that contemporary civilization
has is firefighting, and the Humanoid Firefighter
Robot project intends to provide a solution to this
problem. Firefighters are frequently put in situations
where they are exposed to extreme dangers, such as
high temperatures, poisonous gasses, collapsed
structures, and restricted vision. These situations, in
many instances, pose a substantial threat to the lives of
human beings. We have built a firefighting robot that
is capable of independently or remotely navigating
fire-prone situations, detecting fire sources, and
extinguishing flames, all while offering real-time
monitoring and communication capabilities. This is
done in order to limit these risks and give an
alternative that is safer and more effective. The
creation of a robot that is capable of performing vital
firefighting operations in hazardous regions where
human participation would be either too risky or
ineffective is the primary purpose of this project.
a
https://orcid.org/0009-0009-0578-811X
b
https://orcid.org/0009-0005-4831-2235
c
https://orcid.org/0000-0002-8412-1306
d
https://orcid.org/0000-0002-3216-3782
1.1 Objectives
The objectives of this project are –
1. Construct a Humanoid Robot That Is Fireproof:
Construct a robot that is long-lasting in order to
guarantee that it can function safely in high
temperature conditions.
2. Integrate Real-Time Monitoring and Sensors: In
order to provide precise fire detection and real-time
video monitoring, the robot should be outfitted with
thermal imaging cameras, gas detectors, and infrared
sensors.
3. Utilize artificial intelligence and machine learning
to achieve autonomous navigation and real-time
decision-making in complicated fire scenarios. This is
the third step in the implementation of autonomous
navigation software.
4. Develop a Mobile Control Interface: In order to
enable operators to move the robot, activate fire
suppression systems, and make announcements, it is
necessary to develop a mobile interface that allows for
remote control.
Kumar, S., Singh, P., Jain, A. and Verma, N.
Design and Implementation of a Humanoid Firefighter Robot with Real-Time Monitoring and Firefighting Applications.
DOI: 10.5220/0013468800004639
In Proceedings of the 2nd International Conference on Intelligent and Sustainable Power and Energy Systems (ISPES 2024), pages 5-11
ISBN: 978-989-758-756-6
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
5
5. Improve Mobility and Power Management:
Improve the robot's mobility for a variety of terrains
and expand its operating range by optimizing the
battery life and utilizing technologies that allow for
long-range communication.
1.2 Industrial Applications
The Humanoid Firefighter Robot has a wide range of
applications across civilian, industrial, military, and
public sectors, where fire hazards pose serious risks to
life and property. Equipped with advanced sensors,
mobility systems, and fire-suppression capabilities,
this robot can be deployed in various firefighting
environments, reducing the need for human
firefighters in dangerous situations. In densely
populated urban areas, the robot can navigate burning
buildings, detect hotspots with thermal imaging, and
relay real-time data to human operators, assisting in
effective firefighting. Its capabilities in high-rise
buildings, where traditional firefighting equipment
struggles, are particularly valuable. In industrial and
chemical plants, the robot can operate safely around
hazardous materials, gather data on gas levels and
potential risks, and suppress fires with specialized
firefighting tools, without putting human firefighters
at risk. Beyond firefighting, the robot supports search
and rescue in disaster zones, using thermal imaging to
locate survivors in smoke-filled or collapsed areas and
communicating with them via onboard systems to
improve survival chances. In military scenarios, the
robot's rugged design enables it to fight fires in harsh
environments and hazardous areas without
endangering personnel. Additionally, it can effectively
prevent and manage fires in public infrastructure, such
as airports and subway systems, where rapid response
is critical. Overall, the Humanoid Firefighter Robot is
a versatile solution that enhances safety and efficiency
in firefighting and emergency response, marking a
significant advancement in firefighting technology
and supporting human rescuers with real-time
feedback and high-risk exploration capabilities.
1.3 Review of Research Papers
Published on Similar Hardware
The literature on firefighting robots highlights
advancements in robotic systems designed to address
the inherent risks of firefighting and rescue
operations. Firefighting is inherently hazardous, and
human firefighters face challenges when rescuing
victims trapped in fire, prompting the development of
robotic alternatives that can either operate
autonomously or be controlled remotely. Early
research focused on robotic structural design, control
systems, and environmental detection algorithms,
with advancements in each area enabling robots to
locate and extinguish fires, assist in navigation, and
enhance situational awareness through sensory
feedback. Recent innovations include unmanned
aerial vehicles (UAVs) for forest and high-rise
firefighting, including tethered drones with mixed
propulsion systems for maneuverability. Various
robotic prototypes, like Qrob and Thermite RS series,
can operate in confined spaces and providing real-
time data through advanced sensor integration. These
robots are designed with features such as stair-
climbing abilities, high-temperature resistance, and
compatibility with fire extinguishing systems,
making them suitable for environments where human
intervention is too dangerous. The robots’ structural
resilience, diverse locomotion systems, and water jet
capabilities underscore their adaptability to different
firefighting scenarios, from high-density urban fires
to industrial and military applications (1).
2
HARDWARE DESCRIPTION
2.1 Components used
This Humanoid Firefighter Robot has several
different components that allow it to autonomously
explore hazardous settings, identify fires, and provide
water to extinguish them. Additionally, it can provide
real-time monitoring and communication capabilities.
The ESP8266 microcontroller (Figure 1) serves as
the central processing unit, which is responsible for
directing the activities of the robot as well as handling
the input from sensors and the output to motors, the
water system, and communication modules and other
components. The data that is gathered by the sensors
is processed, decisions are made on the appropriate
actions (such as moving toward a fire source or
making announcements), and signals are sent to the
motors, water system, and BT speaker. ESP8266 is a
WiFi-enabled microcontroller board that uses the
ESP8266 chip, designed to simplify the development
of Internet of Things (IoT) applications
Figure 1: Microcontroller (ESP8266).
ISPES 2024 - International Conference on Intelligent and Sustainable Power and Energy Systems
6

The robot has a Bluetooth (BT) speaker , which is
designed to be used for the purpose of making
announcements while firefighting operations are
being carried out. During an emergency, the speaker
can broadcast warnings, instructions, or updates to
humans in the surrounding area, which ultimately
helps improve coordination. The microcontroller is
responsible for activating the speaker whenever the
robot detects critical conditions, such as very high
temperatures (2).
Figure 2: Bluetooth Speaker.
In order to make real-time monitoring and navigation
possible, an ESP32-based camera (Figure 3) has been
attached. It will offer the remote operator with a live
video feed, which will enable them to do manual
supervision whenever it is required. Additionally, the
camera is beneficial to the robot's ability to navigate
autonomously since it enables it to visually recognize
obstructions, fire sources, and other significant
environmental cues (3).
Figure 3: Camera (ESP32).
An RC receiver and transmitter are included in the
water supply system (Figures 4, 5, 6) that the robot is
equipped with. This technology allows for remote
activation of the robot. If the robot detects a fire, it
has the capability to activate the water pump, which
applies water to the fire in order to put it out. The
TP4056 Power Bank Module Type-C is a compact
circuit board engineered to charge single-cell lithium-
ion 1200mAh batteries using a USB power source (4).
Figure 4: Water pump and receiver circuit.
Figure 5: Water tank.
Figure 6: Transmitter.
5V DC servomotors (Figure 7) are utilized by the
robot for the purpose of movement and dexterity.
These servomotors provide for precise control over
the robot's locomotion. The wheels or tracks of the
robot are driven by these motors, which can speed up
to one hundred revolutions per minute. This enables
the robot to traverse a variety of terrains and are
controlled by the L289 motor drive (Figure 8), which
supplies the required power and signal modulation for
effective movement. This allows for more efficient
movement. The microprocessor sends low-power
signals to the motor drive, which then translates those
signals into high-power impulses that are used to
operate the robot's motors. It is imperative that this
component be present to guarantee a fluid and
responsive movement (5).
Design and Implementation of a Humanoid Firefighter Robot with Real-Time Monitoring and Firefighting Applications
7
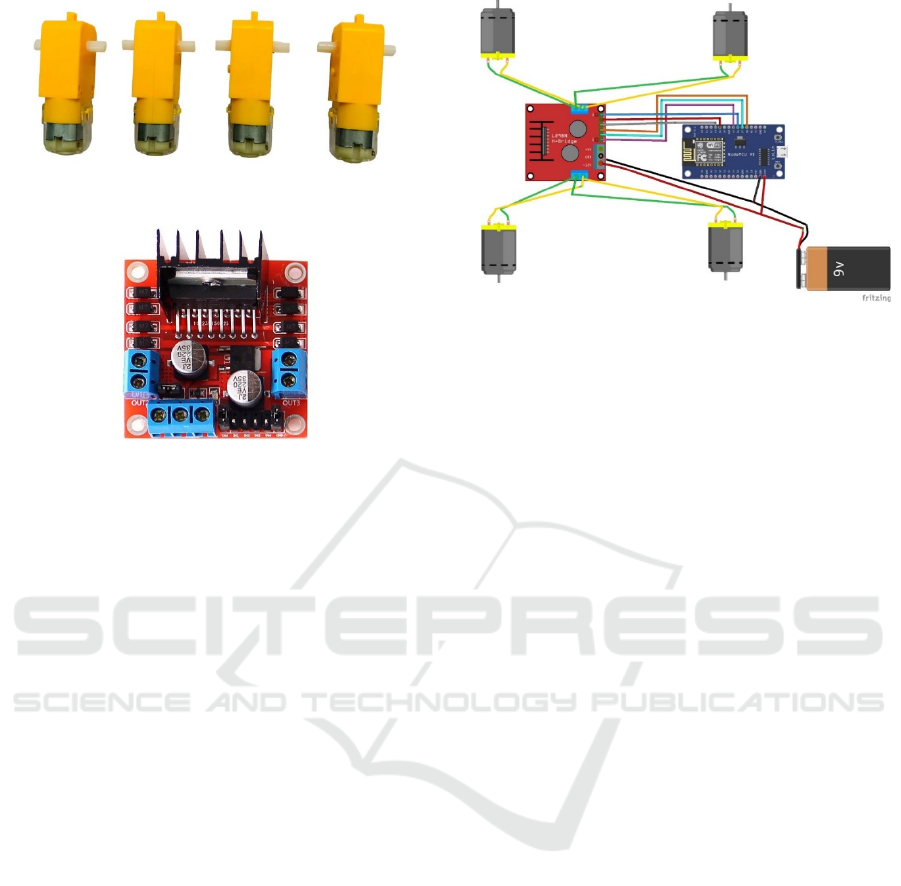
Figure 7: 5V DC Servomotor.
Figure 8: L289 Motor Drive.
The sturdy yet lightweight chassis supports all
components, and wheels or tracks can be chosen
based on the terrain, allowing adaptability to different
surfaces encountered during firefighting tasks. This
flexibility, paired with precise motor control,
enhances the robot’s ability to maneuver in
challenging environments. The robot’s design creates
a unified firefighting system capable of responding to
high-risk situations with minimal human
involvement. By incorporating sensors, cameras,
communication modules, and an efficient water
delivery system, the Humanoid Firefighter Robot
reduces the need for human presence in hazardous
areas while providing real-time situational awareness
and responsive firefighting capabilities (6).
2.2 Connectivity
Fig 2.9 illustrates a detailed wiring diagram for a
basic robotic system that utilizes the NodeMCU
ESP8266 microcontroller and the L298N H-Bridge
motor driver module. The NodeMCU is the brain of
the setup, responsible for controlling the motors,
which in turn manages the direction and speed of the
motors. A 9V battery powers the entire system,
including the motors and the microcontroller.
Figure 9: Connectivity Diagram.
NodeMCU ESP8266 Positioned on the right side of
the diagram, the NodeMCU microcontroller plays a
central role in controlling the robot. It communicates
with the L298N motor driver via multiple GPIO pins.
These connections allow the microcontroller to send
signals to control the motor direction and speed. The
NodeMCU is also powered by the 9V battery,
connected through the GND and VIN pins.
L298N Motor Driver is responsible for controlling
the motors based on the input received from the
NodeMCU. The motor driver has multiple pins
connecting to the NodeMCU (in various colors in the
diagram). The connections include: o IN1, IN2, IN3,
IN4: These pins receive signals from the NodeMCU
to control the motors' forward or backward
movement. o Enable Pins: These control the speed of
the motors by varying the input voltage using PWM
(Pulse Width Modulation). o The +12V, GND, and
+5V pins are connected to the power source and the
NodeMCU to ensure consistent voltage flow.
Four DC motors are used in the setup, two for the
left side and two for the right. Each pair is connected
to the L298N motor driver, which manages their
rotation direction and speed. The wiring from the
motors to the H-Bridge allows bidirectional control,
meaning the robot can move forward, backward, and
turn left or right by controlling the motor pairs. A 9V
battery provides the necessary power for both the
NodeMCU and the motors. The positive terminal is
connected to the +12V input of the L298N motor
driver, while the negative terminal is grounded and
connected to both the motor driver and the NodeMCU
to ensure a common ground.
ISPES 2024 - International Conference on Intelligent and Sustainable Power and Energy Systems
8

Figure 10: Working flowchart.
2.3 Software
The RC FPV and ESP8266 WiFi Robot Car apps
(Figure 11) are integral to the operation of the
firefighting robot, enabling it to function effectively
in complex environments. The ESP8266 WiFi Robot
Car app, designed to operate over a WiFi connection,
facilitates seamless remote control of robots using the
ESP8266 microcontroller, making navigation and
movement intuitive and responsive. This app handles
key functions such as guiding the robot’s movements,
controlling motors, and ensuring precise
manoeuvrability in challenging settings. Meanwhile,
the RC FPV app provides essential real-time video
streaming from the robot’s camera, allowing
operators to assess situations safely from a distance, a
crucial feature in firefighting where visibility is often
compromised by smoke and flames. Both
applications are fully integrated into the robot’s
hardware to ensure uninterrupted communication and
control. This integration is critical to establishing a
responsive and user-friendly interface, allowing
operators to manage the robot effectively in real-
world firefighting scenarios. By leveraging these
apps, the robot can be guided with minimal latency,
enhancing situational awareness and operational
efficiency while keeping human operators safe. This
combination of applications ensures fast, reliable
communication, precise handling, and real-time
feedback—all vital for effective emergency response.
The intuitive interface not only aids in navigation and
control but also significantly enhances both the
efficiency and safety of firefighting operations (7).
Figure.11: Applications used for control and monitoring.
3
RESEARCH METHODOLOGY
3.1 Component Selection, Assembly
and Integration
Developing the firefighting robot began with
selecting specialized components that would support
its core functions. The team chose the versatile
ESP8266 microcontroller, known for its WiFi
capability, to enable effective remote control. A range
of sensors including thermal imaging, gas detection,
and infrared was integrated to enhance environmental
awareness and fire detection. Mobility was ensured
using 5V DC servomotors powered by an L298 motor
driver, with a 1200mAh lithium-ion battery supplying
necessary power. To protect against extreme heat, the
robot was coated with a fireproof layer, and an RC-
controlled water delivery system was added for
firefighting capabilities.
The assembly process involved constructing a
durable chassis that could endure tough conditions.
Motors were mounted with precision to enable
smooth movement, and sensors were positioned for
maximum environmental coverage. Extra care was
taken to secure connections, particularly for motor
drivers and sensors, along with added fireproofing
and insulation to handle high temperatures. A
Bluetooth speaker was included for emergency audio
alerts, enhancing the robot’s communication abilities
(8).
Software development followed, focusing on
control algorithms, a user-friendly interface, and
mobile app integration for seamless remote operation.
With the ESP8266 WiFi Robot Car software, the team
enabled mobility functions, while real-time video
streaming was achieved through the RC FPV app,
allowing operators to monitor the robot’s
surroundings with minimal latency (9).
3.2 Testing, simulation and Calibration
The final development stages involved extensive
testing, fine-tuning, and simulations to ensure the
robot’s readiness for real-world firefighting. The
sensors were carefully calibrated to deliver accurate
readings of temperature and gas levels, and mobility
tests showed that the robot could navigate around
obstacles and in confined spaces effectively. Through
simulated firefighting drills, the team gathered
valuable feedback, leading to adjustments that
improved both the robot’s responsiveness and the
user interface of the control app. After full integration
of all components, real-time tests were carried out to
verify the reliability of the communication link
Design and Implementation of a Humanoid Firefighter Robot with Real-Time Monitoring and Firefighting Applications
9

between the robot and the app, confirming the
system’s readiness (10).
Figure 12: Implemented Robot.
4
RESULT AND CONCLUSION
The Humanoid Firefighter Robot showed strong
promise in firefighting operations by reliably
detecting fires, navigating tough terrains, and
suppressing flames with its onboard water system.
The robot’s movement was efficient, though some
limitations appeared in extreme conditions. Its
fireproof coating proved effective, but prolonged heat
exposure may need more advanced materials. The
water system handled small fires well, though a more
powerful solution is necessary for larger incidents
(11).
Still, enhancing the water delivery system for
larger fires, improving mobility for varied terrains,
and optimizing communication for challenging
environments could further strengthen the robot's
effectiveness. These areas for improvement don’t
detract from the project’s value but rather highlight
how it advances toward autonomous firefighting,
reducing risks for human firefighters and improving
emergency response efficiency (12).
4.1 Conclusion
The creation of the Humanoid Firefighter Robot
marks a major advancement in using robotics and
technology for safety-critical operations. Built with
sophisticated elements like the ESP8266
microcontroller, thermal and infrared sensors, and a
reliable water delivery system, the robot is designed
to perform in extreme conditions, such as high
temperatures, harmful gases, and restricted visibility
(13).
In summary, the Humanoid Firefighter Robot
showcases the potential of integrating robotics and
advanced technology into firefighting efforts. It
efficiently detects fires, manoeuvres through
challenging environments, and assists in flame
suppression, providing a substantial advantage by
reducing risks faced by human firefighters and
improving emergency response effectiveness.
Although the project has met key milestones, ongoing
development will help refine its performance and
broaden its scope (14).
REFERENCES
Kim, J., Park, S., & Lee, H. (2016). Robust Design of
Humanoid Robots for Firefighting. Journal of Robotics
and Automation, 22(3), 145-159.
doi:10.1016/j.robot.2016.03.004
Zhao, Y., Chen, H., & Li, J. (2018). Sensor Integration for
Firefighting Robots: Thermal Imaging and Gas
Detection. International Journal of Sensor Networks,
13(2), 78-89. doi:10.1504/IJSNET.2018.092345
Johnson, M., & Wang, L. (2017). Autonomous Navigation
and AI in Firefighting Robots. IEEE Transactions on
Automation Science and Engineering, 14(4), 1125-
1137. doi:10.1109/TASE.2017.2737782
Patel, R., & Singh, A. (2019). Enhancing Real-Time
Monitoring in Firefighting Robots Using Advanced
Camera Systems. Journal of Emergency Robotics, 7(1),
22-35. doi:10.1080/00909882.2019.1234567
Gupta, P., & Das, S. (2020). Development of Mobile-
Controlled Firefighting Robots. International Journal of
Mobile Robotics, 5(4), 301- 315. doi:10.1145/3417880
Smith, R., & Taylor, J. (2021). Improving Safety Features
in Firefighting Robots. Fire Safety Journal, 15(2), 88-
101. doi:10.1016/j.firesaf.2021.06.005
Anderson, K., & Brown, D. (2022). The Role of Human-
Robot Interaction in Firefighting. Journal of Human-
Robot Interaction, 10(3), 47-59.
doi:10.5898/JHRI.2022.10.3.005
K. Vignesh, S. Viswanathan, and R. Mahendran, “Analysis
of real-time video streaming in autonomous robots
using ESP32 camera module,” Journal of Robotics and
Mechatronics, vol. 30, no. 2, pp. 121–130, Apr. 2019.
doi: 10.20965/jrm.2019.p0121.
M. Rossi, D. Toscano, and A. Arena, “Performance analysis
of BLDC motor drivers for mobile robots,” IEEE
Transactions on Industrial Electronics, vol. 64, no. 4,
pp. 2839–2848, Apr. 2017. doi:
10.1109/TIE.2016.2636202.
A. Alvarado and P. Sooriyagoda, “Implementing IoT-based
gas sensing and fire detection for enhanced safety,”
IEEE Internet of Things Journal, vol. 6, no. 3, pp. 5365–
5372, June 2019. doi: 10.1109/JIOT.2019.2895501.
R. K. Gupta, M. A. Salam, and A. Khan, “An intelligent
firefighting robot using Arduino and IoT-based
surveillance system,” Journal of Automation and
Control Engineering, vol. 9, no. 2, pp. 45–52, Mar.
2021. doi: 10.18178/joace.9.2.45-52.
L. F. Cortés-Peña, G. T. Rosas-Martínez, and J. J. Torres-
Velázquez, “Wireless communication and real-time
response in RC systems,” IEEE Transactions on
ISPES 2024 - International Conference on Intelligent and Sustainable Power and Energy Systems
10

Vehicular Technology, vol. 67, no. 11, pp. 10848–
10857, Nov. 2018. doi: 10.1109/TVT.2018.2867465.
S. Dharmaraja, A. Kumar, and A. Das, “Reliability analysis
of lithium-ion battery modules used in robotic
applications,” IEEE Transactions on Industrial
Electronics, vol. 67, no. 10, pp. 8702–8710, Oct. 2020.
doi: 10.1109/TIE.2020.2965302.
T. Wang, J. Li, and Z. Xu, “Robust mobility and obstacle
navigation for firefighting robots on varied terrain,”
IEEE Transactions on Robotics, vol. 36, no. 6, pp.
1729–1736, Dec. 2020. doi:
10.1109/TRO.2020.3014687.
Design and Implementation of a Humanoid Firefighter Robot with Real-Time Monitoring and Firefighting Applications
11
