
Enhancing Social Motion Prediction Using Attention Mechanisms
and Hierarchical Structures
Botao Dong
1a
, Yumo Ji
2b,*
and Yongze Miao
3c
1
School of Mechanical and Electrical and vehicle Engineering, Beijing University of Civil Engineering and Architecture,
Beijing, China
2
Software and Systems Engineering, LUT University, Lahti, Finland
3
School of Science Technology, Hong Kong Metropolitan University, Hong Kong, China
Keywords: Multi-Agent Motion Prediction, Kolmogorov-Arnold Networks, Behavioural Cloning, Generative
Adversarial Imitation Learning, Transformer Model.
Abstract: With the continuous deepening of artificial intelligence applications in multi-agent systems, the accuracy and
efficiency of motion prediction have become key research challenges. This paper proposes a novel neural
network model based on Kolmogorov-Arnold Networks (KANs) aimed at enhancing the generalization ability
and prediction accuracy of models in multi-agent motion prediction tasks. The study first analyses the
limitations of existing behavioural cloning methods and Generative Adversarial Imitation Learning (GAIL)
in handling complex dynamic interactions and nonlinear feature data. To address these issues, this paper
introduces KANs, a model that replaces the weight parameters in traditional multi-layer perceptron with
learnable univariate spline functions, thereby enhancing the model's nonlinear feature extraction capability
and adaptability. In the experiments, this paper adopts the Wusi dataset proposed by Zhu et al. in 2024, which
contains historical motion sequences of multiple participants. The model designed in this study combines
Transformer encoders and decoders, along with KANs, to process local and global features and generate
motion predictions for all participants in future time periods. Through feature fusion nodes and multi-level
strategy networks, the model can generate more natural and accurate motion sequences. The experimental
results show that compared with traditional Transformer-based models, the model in this paper has
significantly improved prediction accuracy and training efficiency. Moreover, the model demonstrates better
generalization ability on unseen complex patterns, providing new perspectives and methods for the practical
application of multi-agent systems.
1 INTRODUCTION
Social motion prediction is an active and challenging
research topic in the field of artificial intelligence,
involving the understanding and prediction of human
behaviour patterns in social environments. This
research is not only crucial for applications such as
autonomous driving and team sports but also has
profound implications for improving machine
interaction capabilities and intelligence levels. The
anticipatory ability demonstrated by humans in social
activities enables them to make rapid and accurate
responses in complex environments. Current research
a
https://orcid.org/0009-0001-4734-9977
b
https://orcid.org/0009-0007-7805-1640
c
https://orcid.org/0009-0006-2200-2287
mainly focuses on motion prediction in simple
interaction scenarios, with limited capability to
capture complex and fine-grained human behaviours.
To overcome these limitations, the main research
method of this paper includes the adoption of an
innovative deep learning framework to improve the
accuracy and generalization ability of multi-agent
motion prediction. The core of the research method is
the introduction of Kolmogorov-Arnold Networks
(KANs), a novel neural network model that enhances
the model's flexibility and adaptability by replacing
traditional weight parameters with univariate spline
functions. The learnable activation functions of
Dong, B., Ji, Y. and Miao, Y.
Enhancing Social Motion Prediction Using Attention Mechanisms and Hierarchical Structures.
DOI: 10.5220/0013253300004558
In Proceedings of the 1st International Conference on Modern Logistics and Supply Chain Management (MLSCM 2024), pages 185-189
ISBN: 978-989-758-738-2
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
185

KANs can adjust adaptively according to the training
data, thereby better capturing nonlinear relationships
in the data (Helbing, & Molnar, 1995).
The study also employs the Transformer model,
which consists of encoders and decoders, to process
local and global features. Each Transformer contains
three layers and eight attention heads, and the strategy
network parameters are shared. KANs are introduced
into the Transformer encoders and decoders to
enhance the model's ability to capture complex
dynamic interactions. In addition, the study also
adjusts the model's dimensions to adapt to a specific
dataset—the Wusi dataset, proposed by Zhu et al. in
2024, which includes historical motion sequences of
multiple participants.
By combining KANs and Transformers, the study
aims to generate more natural and accurate future
motion predictions while improving the model's
adaptability to unseen complex patterns (Alahi, Goel,
Ramanathan, et al, 2016). The proposal of this new
algorithm aims to address the limitations of existing
algorithms in handling highly nonlinear and periodic
data, as well as the problem of overfitting to training
data (Guo, Bennewitz, 2019).
2 METHOD
2.1 Dataset
This study cites the first large-scale multiplayer 3D
sports dataset, Wusi (Wusi Basketball Dataset),
proposed in 2024 by Zhu et al (Zhu, Qin, Lou, et al,
2024). The Wusi dataset shows advantages when
faced with the task of multiplayer sports prediction,
outperforming other datasets in terms of size
(duration and number of people) and intensity of
interactions.
The input data is composed of historical
movement sequences from multiple participants.
Given Ρ participants,the movement history of each
participant 𝑝 may be represented as a time series of
length Τ, where each time step 𝑡 records the body
posture of the participant in 3D space: 𝒳
1 ≤𝑡≤
Τ,1 ≤𝑝≤P . The output data consists of motion
predictions for all participants in the future time
period, and the goal of the output is to predict the
sequence of postures from time Τ to Τ + Τ
. For each
participant 𝑝, the sequence of predicted future poses
is represented as: 𝒳
Τ≤𝑡≤Τ+ Τ
,1 ≤𝑝≤Ρ.
𝒳
represents the 3D pose at time step 𝑡.
2.2 Existing Algorithm
The motion prediction model in the study was
modelled using Markov Decision Process (MDP).
Behavioural cloning uses expert demonstration data
to train the model by supervised learning, which
minimizes the discrepancy between the model-
generated actions and the expert's behaviours.
Behavioural cloning methods excel in terms of
computational and sample efficiency (Caude,
Behavioural, 2010), but there are some problems; the
strategies tend to overfit the presentation of the expert
in the region of the state space, limiting the ability to
generalize (Borui, Ehsan, Hsu, 2019). To address
these problems, Generative Adversarial Imitation
Learning (GAIL) (Jonathan and Stefano, 2016) was
introduced. The policy network is regularized by
adversarial training to match its distribution of state-
action pairs with that of the policy of the expert, while
a specific cognitive hierarchy model is used to
express the recursive reasoning process (Colin, Ho,
and Chong, 2004).
2.3 Limitations of Baseline
During the algorithmic implementation of the
baseline, multiple performance bottlenecks limit the
accuracy and training efficiency of the model.
In multi-agent motion prediction tasks with input
data having complex dynamic interactions and
potentially nonlinear features, the nonlinear feature
extraction capability of the model is crucial for
prediction accuracy. Transformer models are known
for their expertise in identifying semantic correlations
(Alharthi, & Mahmood, 2024), but Transformer-
based deep learning model performs obvious
limitations when dealing with highly nonlinear and
periodic data (Nie, et al, 2022; Zeng, et al, 2023). This
study argues that when the input data contains
complex dynamic interactions, the prediction
accuracy of the model decreases significantly due to
its inability to effectively capture these nonlinear
relationships. Meanwhile, due to the inability of the
model to adequately capture the complex interaction
characteristics between the participants, the generated
motion sequences do not behave naturally enough in
certain scenarios. This phenomenon not only affects
the generative ability of the model, but also reduces
its credibility in practical applications.
As the model underperforms under complex
models, Transformer-based deep learning models
may perform overfitting on the data, which means
that the model performs well on the training data but
generalizes poorly on the validation or test dataset.
MLSCM 2024 - International Conference on Modern Logistics and Supply Chain Management
186
This phenomenon reveals that the model is poorly
adapted to unseen complex patterns, limiting its
potential for application in different scenarios.
2.4
Kolmogorov-Arnold Networks
Kolmogorov-Arnold Networks (KANs) (Liu, Wang,
Vaidya, 2024) is an innovative neural network model
that challenges the Multilayer Perceptron (MLP). The
MLP occupies almost all the non-embedded
parameters in the Transformer (Ashish, 2017) model
and is often hard to interpret in the lack of post-
analysis tools as compared to the Attention Layer
(Hoagy, Aidan, Logan, 2023). KANs replace each
weight parameter with a univariate spline function.
The learnable activation function will adaptively
adjust and learn based on the training data, showing
higher flexibility and adaptability compared to fixed
activation functions.
The study implements training and testing on the
Wusi dataset using the proposed framework. This
study uses Transformer encoder for local and global
state encoding, while Transformer decoder is used for
policy network. Each Transformer consists of three
layers and eight attention heads, while sharing the
policy network parameters ∅
⋯∅
. The study
introduces KANs in the pair of Transformer encoder
and decoder, while the dimensionality of the model is
adjusted.
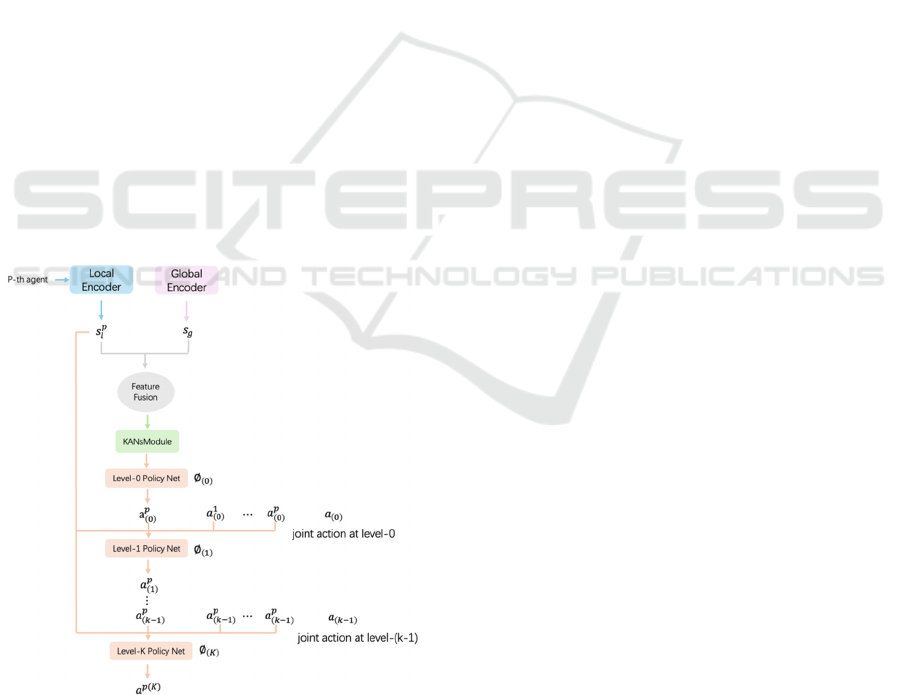
Figure 1: Framework overview(Photo/Picture credit:
Original).
Figure 1 shows an overview of the framework.
For the p-th agent, two state encoders are responsible
for processing local and global state features 𝑠
and
𝑠
, after integration by feature fusion nodes, the fused
features are passed to the KANs. The processed
enhanced features are passed to the Level-0 policy
network to generate the initial action 𝑎
. The Level-
K policy network is based on 𝑠
and the joint actions
of the previous level 𝑎
to produce action 𝑎
.
3 EXPERIMENTS
3.1
Setup
Evaluation metrics: This study calculates the Mean
Per Joint Position Error (MPJPE) between the
prediction of future motion and the ground truth. The
trajectory prediction and position prediction results
are distinguished by counting the mean root position
error and the mean local position error (MPJPE after
root alignment). Results are reported in millimetres.
3.2
Evaluation and Comparison
In this study, the proposed model is tested to evaluate
the performance of the existing model against the
optimized model in this study. Table 1 reveals that the
optimized model in this study achieved competitive
results with the SOTA method. It is worth noting that
the baseline model is very similar to the optimized
model in this study in terms of long-term motion
prediction accuracy. However, the baseline model is
limited in short-term and root trajectory motion
prediction. In contrast, the optimized model in this
study significantly outperforms the baseline model in
short-term and root-trajectory motion prediction,
which implies that the optimized model in this study
demonstrates an advantage in capturing motion
patterns and trends in the short-term, while it is able
to demonstrate a high quality of motion prediction
when dealing with complex motion scenarios. The
copyright form is located on the authors’ reserved
area.
3.3
Ablation
Study
Table 2 shows the ablation study of model size and
architectural design. The dimensionality of the model
is adjusted in this study. By comparing the models
with different dimensions, model dimensions that are
too large lead to overfitting of the model, which
cannot be generalized well to new data, while the
Enhancing Social Motion Prediction Using Attention Mechanisms and Hierarchical Structures
187
Table 1: Performance comparison with the baseline method.
milliseconds Global Local Roo
t
400 600 800 1000 400 600 800 1000 400 600 800 1000
Baseline 54.6 86.2 119.3 152.5 43.7 60.8 74.6 86.6 41.7 66.9 94.8 124.0
Ours 54.5 86.4 119.4 152.4 42.8 60.7 75.7 88.3 40.0 64.5 91.6 119.9
Table 2: Ablation study of model dimensions and architectural designs.
Milliseconds Global Local Roo
t
400 600 800 1000 400 600 800 1000 400 600 800 1000
(a) D_
model = 128
61.3 92.5 124.8 157.6 48.4 65.2
79.1 90.6 43.9 68.6 96.0 124.9
(b) D_
model = 256
55.0 86.8 120.0 153.7 43.3 60.6
75.1 87.3 40.8 65.6 93.3 122.7
(c) D_
model = 1024
60.9 92.9 126.0 158.9 47.3 64.2
78.3 90.1 44.7 70.1 98.0 126.9
(d) D_
model = 512
54.5 86.4 119.4 152.4 42.8 60.7
75.7 88.3 40.0 64.5 91.6 119.9
computational cost of the model increases
significantly. Model dimensions that are too small
lead to higher errors, which cannot effectively capture
complex features in the data and have limitations on
generalization to new data. In (d), the model
performance is the best in terms of error performance,
excelling in both short-term and long-term
predictions, showing good generalization to unseen
data, especially outperforming the other dimensions
in terms of root position error.
4 CONCLUSIONS
The method proposed in this study outperforms the
baseline model in terms of average root position error.
The model in this study shows an advantage in the
prediction accuracy of the core parts of human
movement, and the accurate prediction of root
position effectively reduces the accumulation of
errors caused by unstable postures. In comparison
with the baseline model, the performance of the
model is similar to that of the baseline model at
different time steps, but the method proposed in this
study has improved short-term prediction ability. The
model proposed in this study is able to respond
quickly and accurately capture sudden changes and
short-term dynamics in motion, providing accurate
short-term prediction results.
Although the model performs well in short-term
prediction, the performance at long time steps still
needs to be improved. It needs to be ensured that the
model is not excessively complex for further
enhancement of the expressive power of the model.
The current model's main application is in motion
prediction, showing limitations in multi-domain
applications. Future research could try to extend to
more domains to explore the optimization directions
and challenges of the model architecture.
AUTHORS CONTRIBUTION
All the authors contributed equally and their names
were listed in alphabetical order.
REFERENCES
Alahi, A., Goel, K., Ramanathan, V., Robicquet, A., Leung,
T., & Fei-Fei, L. (2016). Social-LSTM: Human
trajectory prediction in crowded spaces. Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, 3419-3428. https://doi.org/10.1109/
CVPR.2016.332
Alharthi, M., & Mahmood, A. (2024). Enhanced Linear and
Vision Transformer-Based Architectures for Time
Series Forecasting. Big Data and Cognitive Computing,
8(5), 48.
Ashish, V., Noam, S., Niki, P., Jakob, U., Llion, J., Aidan,
N. G., Łukasz, K., and Illia, P. 2017. Attention is all you
need. Advances in neural information processing
systems, 30.
Borui, W., Ehsan, A., Hsu, C., Huang, D. A., and Niebles,
J. C. 2019. Imitation learning for human pose prediction.
In Proceedings of the IEEE/CVF International
Conference on Computer Vision, pages 7124–7133.
Caude, S., Behavioral, C. 2010. Encyclopedia of Machine
Learning, pages 93–97.
MLSCM 2024 - International Conference on Modern Logistics and Supply Chain Management
188

Colin, F., Ho, T. H., and Chong, J. K. 2004. A cognitive
hierarchy model of games. The Quarterly Journal of
Economics, 119(3):861–89.
Guo, Y., & Bennewitz, M. (2019). Predicting pedestrian
trajectories with social-aware deep reinforcement
learning. IEEE Robotics and Automation Letters, 4(2),
3443-3450.
https://doi.org/10.1109/LRA.2019.2894916
Helbing, D., & Molnar, P. (1995). Social force model for
pedestrian dynamics. Nature, 376(6517), 47-50.
https://doi.org/10.1038/376047a0
Hoagy, C., Aidan, E., Logan, R., Robert, H., and Lee, S.
2023. Sparse autoencoders find highly interpretable
features in language models. arXiv preprint
arXiv:2309.08600.
Jonathan, H., and Stefano, E. 2016. Generative adversarial
imitation learning. In Advances in neural information
processing systems, pages 4565–4573.
Liu, Z., Wang, Y., Vaidya, S., Ruehle, F., Halverson, J.,
Soljačić, M., ... & Tegmark, M. (2024). Kan:
Kolmogorov-arnold networks. arXiv preprint
arXiv:2404.19756.
Nie, Y., Nguyen, N.H., Sinthong, P., Kalagnanam, J. A.
2022. Time Series is worth 64 words: Long-term
forecasting with Transformers. arXiv 2022,
arXiv:2211.14730.
Zeng, A., Chen, M., Zhang, L., Xu, Q. 2023. Are
Transformers effective for Time Series Forecasting?
Proc. AAAI Conf. Artif. Intell. 2023, 37, 11121–11128.
Zhu, W., Qin, J., Lou, Y., Ye, H., Ma, X., Ci, H., & Wang,
Y. (2024). Social motion prediction with cognitive
hierarchies. Advances in Neural Information
Processing Systems, 36.
Enhancing Social Motion Prediction Using Attention Mechanisms and Hierarchical Structures
189
