
Explore the Impact and Key Role of AI Technology in
Autonomous Driving
Laikai Xu
a
Sino-British College, University of Shanghai for Science and Technology, Middle FuXin Road 1195, ShangHai, China
Keywords: Artificial Intelligence, Autonomous Driving, Automotive Sensors, Neural Networks.
Abstract: Artificial intelligence technology in today's world is in a stage of exponential explosive growth, and the time
of technology iteration is getting faster and faster, so artificial intelligence will soon penetrate into every
industry. It is obvious that driverless technology is developing more and more rapidly with the support of
artificial intelligence. For example, Google's driverless project, Tesla's Autopilot, and China's Baidu's Carrot
Travel are rapidly affecting people's travel methods. At the same time, it is very clear that more and more
technology companies are pouring into the research and development of driverless technology like a flood.
This paper will discuss the key role and impact of artificial intelligence in driverless technology, introduce
the sensors of self-driving cars, describe the significance of sensor fusion strategies, and analyze the deep
learning models used in data processing. At this stage, AI has become a hot spot in the development of world
science and technology. The research object of this paper is about the key role of AI in the field of autonomous
driving.
1 INTRODUCTION
First of all, in real life, many people may not know
the true meaning of self-driving cars (AVs), which
can sense the external environment through the car's
sensors, and then transmit the data to the car's interior
for analysis and then predict and plan the next
operation of the car. Driverless cars rely on
technologies such as Global Positioning systems
(GPS), lidar and radar to take the surrounding
environment and transmit the data to the next part of
the vehicle to determine the direction and speed of the
vehicle, as well as to predict the behaviour of other
road users, such as cyclists and pedestrians walking
on the road. (Isaac, 2016). For centuries, since the
invention of the automobile, many scientists have
dreamed of enabling cars to drive themselves. The
concept of self-driving cars dates back to the 16th
century, when Leonardo Da Vinci designed a small,
three-wheeled self-propelled car with a small pre-
programmed steering system and parking brakes
combined with a series of propulsion springs, which
is amazing because it provides humanity with the
earliest blueprint for future self-driving cars.
a
https://orcid.org/0009-0002-7899-081X
The early modern autonomous car experiments
were led by Carnegie Mellon University (CMU) and
Delphi University (DELCO), using simple sensors
and algorithms. By the 1990s, Carnegie Mellon's Na-
vigation Laboratory (Navlab) developed early
prototypes of autonomous vehicles using computer
vision and sensor fusion. In the past 20 years,
autonomous driving technology has continued to
mature, and many technology giants have launched
their own autonomous driving systems, such as
Google and Tesla. Although they are not fully
autonomous, their advanced driver assistance systems
(ADAS) functions demonstrate the potential of AI in
car driving.
Today, more and more companies have joined in
and achieved a series of technological breakthroughs:
advances in deep learning, computer vision, sensor
technology (such as lidar) and high-precision map
technology have made driverless cars more reliable in
various complex environments.
In recent years, more and more scholars have been
studying how AI can enhance driverless technology,
indicating that AI is still promising in enhancing
traffic safety and improving traffic efficiency.
According to research, about 1.35 million people die
Xu, L.
Explore the Impact and Key Role of AI Technology in Autonomous Driving.
DOI: 10.5220/0013234100004558
In Proceedings of the 1st International Conference on Modern Logistics and Supply Chain Management (MLSCM 2024), pages 93-98
ISBN: 978-989-758-738-2
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
93

in traffic accidents every year in the world, and about
90% of these accidents are caused by human error.
However, driverless technology with the support of
AI can well reduce the probability of human error,
because AI can predict and avoid potential dangers
and reduce the incidence of accidents by analyzing
sensor data in real time.
In addition, AI also optimizes vehicle path
planning and traffic management, which can reduce
traffic congestion and improve overall transportation
efficiency. AI can also continuously optimize the
vehicle's self-diagnosis and maintenance prediction
functions through machine learning and big data
analysis, and improve the reliability of the system
(Bhardwaj, 2024).
However, it is worth noting that although AI can
rapidly promote the development of driverless
technology, it still has shortcomings in some aspects.
For example, when driverless cars face some complex
road conditions, the system may not have processed
similar data before and make wrong decisions. In
addition, when facing some extreme weather
conditions, AI processing data will also make similar
mistakes.
Therefore, exploring smarter AI models and
finding better sensors to achieve the future AI can
quickly analyze some unknown data sets and make
correct decisions efficiently during driving under
some disadvantageous conditions. This paper focuses
on summarizing what relevant models and algorithms
AI will use in driverless technology, and will point
out what kind of profound impact the arrival of AI
will have on society, and how governments should
take the right measures to prevent the harm caused by
AI in the face of these problems.
2 THE KEY ROLE OF AI IN
DRIVELESS TECHNOLOG
Y
The AI can play a key role in the field of driverless
driving, so what specific key roles can it play? First,
AI can enable self-driving vehicles to perceive the
surrounding environment through advanced sensors,
cameras, radar, lidar, GPS and other equipment, and
make real-time decisions. Secondly, AI can improve
the safety of autonomous driving through algorithms,
especially methods based on deep learning, which
have made significant progress in key components
such as vehicle perception, object detection and
planning.
An Intel report revealed that self-driving
technology will reduce users’ commuting times and
save hundreds of thousands of lives over the next
decade. For example, the first self-driving vehicle
using neural networks in 1988 was able to generate
control commands from camera images acquired by a
laser rangefinder. Finally, and more importantly,
since the decision-making process of autonomous
driving systems is opaque to humans, explainable AI
(XAI) is needed to provide transparency in the
decision-making process, enhance user trust in the
system, and meet regulatory requirements (Shahin et
al., 2024).
The main way for humans to perceive the outside
world is through various senses. Similarly, cars
perceive the outside world mainly through various
sensors that act as the "senses" of the car to perceive
changes in the external environment. Sensors play an
extremely important role in the process of
autonomous driving and are the key to the decision-
making process of autonomous vehicles.
The data they collect has heterogeneous and
multimodal characteristics, and these data are further
integrated to form effective decision-making rules. In
the autonomous driving system, they are the basis for
perceiving the surrounding environment of the
vehicle. In addition, they can also provide detailed
information about objects around the vehicle, roads
and traffic conditions.
Sensors can detect obstacles, identify road signs,
measure vehicle speed and position, etc., which
greatly improves driving safety. Sensors are divided
into short-range, medium-range and long-range
according to the transportation range of wireless
technology. Specific sensor types include cameras,
millimetre wave radar (MMW-Radar), GPS, inertial
measurement unit (IMU), lidar, ultrasonic and
communication modules. Each sensor has its own
characteristics. For example, cameras can be widely
used for environmental observation and can produce
high-resolution images, but are affected by lighting
and weather conditions. LiDAR can estimate distance
and generate point cloud data by emitting laser pulses
and measuring the time it takes to reflect back, but it
is expensive. By comparison, so each sensor has its
advantages and disadvantages (Ignatious et al., 2022).
It is obvious that a powerful sensor system is
needed to truly realize unmanned driving, so perform
sensor fusion to complement the advantages and
disadvantages of each sensor and achieve efficient
operation. Sensor fusion is the combination of data
from multiple sensors to obtain more accurate and
reliable environmental information than a single
sensor. Scholars have studied many sensors fusion
strategies. This paper mainly discusses three
important fusion levels. (1) Low-level Fusion (LLF):
MLSCM 2024 - International Conference on Modern Logistics and Supply Chain Management
94

Driverless cars improve the accuracy of obstacle
detection by integrating the lowest level of sensor
data, also known as raw data, and retaining all the
data. (2) Intermediate Fusion (MLF): The car fuses
the corresponding sensor data, such as colour
information extracted from radar and lidar images or
position features. (3) High-Level Fusion (HLF): Each
sensor independently executes the target detection or
tracking algorithm, and then combines the results
together to work together to achieve the same goal. In
addition to the fusion of the three levels of sensors,
algorithmic fusion is also carried out, such as the
fusion of convolutional neural networks (CNN) and
recurrent neural networks (RNN) (Yeong et al., 2021).
3 THE ROLE OF MACHINE
LEARNING AND DEEP
LEARNING IN AUTONOMOUS
DRIVING TECH
Machine learning is a branch of artificial intelligence
that enables systems to learn data from fixed
problems and train the data so that analytical models
can learn on their own. Automatically constructing
problems and autonomously learning to solve related
tasks, ML enables computers to discover hidden
insights and complex patterns without explicit
iterative programming to learn from training data for
specific problems. Deep learning is a conceptual
network (artificial neural network) of machine
learning based on artificial nerves.
For many applications, DL models outperform
shallow ML models and traditional data analysis
methods. In addition, DL is able to process large
amounts of high-dimensional data such as text,
images, videos, speech, and audio data by using deep
neural network architectures. Deep learning is a
subset of machine learning that focuses on using deep
neural networks to improve learning capabilities.
DL models typically contain multiple hidden
layers and are able to automatically discover high-
level feature representations of data (Janiesch et al.,
2021). For driverless technology, ML and DL play an
important role in four main aspects: environmental
perception, decision making, predictive modeling,
and real-time processing.
3.1 The Role of Convolutional Neural
Networks in Autonomous Driving
The architecture of a CNN, including input layers,
convolutional layers, pooling layers, and fully
connected layers. The key role of a convolutional
neural network is to detect objects on the road while
the car is driving. By training artificial neurons, CNN
can analyze different road scenarios, such as
collisions, open roads, traffic, etc., and send
appropriate instructions to the car based on these
scenarios, such as braking, accelerating, or
decelerating. In convolutional neural networks, the
You Only Look Once (YOLO) algorithm is
particularly worth mentioning.
It is a prediction technique that can provide
accurate results with fewer background errors. It has
excellent learning capabilities and can learn
representations of objects and apply them in object
detection (Mishrikotkar, 2022). YOLO is designed
for real-time applications and can achieve fast
detection speeds while maintaining high accuracy.
The network structure of YOLO includes several
main substructures, such as convBnLeaky,
bottleneck, bottleneckCSP, and SPP (Spatial Pyramid
Pooling), which are reused throughout the network to
extract image features.
In addition, YOLO can also efficiently extract
image features through its convolutional layers and
specially designed modules (such as CSPNet), and
gradually reduce the spatial dimension of the feature
map while increasing the feature depth (Liu et al.,
2021). Nowadays, many deep learning architectures
are aimed at target detection, but recently there is a
new study that uses deep networks for vehicle control,
which is called an end-to-end architecture. The input
source of this architecture is a deep network
composed of different sensors, and the weight
parameters are trained based on the training signal
input of the vehicle. As shown in Figure 1, a small
remote control car can pass obstacles in a controlled
real environment through a CNN network. This
neural network uses 7 convolutional layers and 4 fully
connected layers to map the steering angle training
signal to the raw pixel input from the front RGB
camera (Cameron Wesley Hodges et al., 2019).
Figure 1: Five-layer convolutional neural network
(Cameron Wesley Hodges et al., 2019).
Explore the Impact and Key Role of AI Technology in Autonomous Driving
95
3.2 The Role of Recurrent Neural
Networks in Autonomous Driving
Technology
RNN is different from the general neural network
architecture in that it introduces a recurrent layer,
which is the core of the RNN and can process
sequence data. The recurrent layer has a memory
function that can capture the dynamic features in the
time series. For unmanned driving technology, the
recurrent layer can learn the movement pattern of the
vehicle at different time steps. In addition, there is a
mixed density network output layer (MDN). Unlike
the traditional single output, the MDN can output a
probability density function to represent the
uncertainty and multimodality of the prediction. Then
the main role of RNN in the process of unmanned
driving is to predict the trajectory. The recurrent
neural network can process sequence data, which
enables them to identify the behavior patterns and
intentions of drivers at intersections.
Through the mixed density network output layer,
RNNs can provide a probability distribution of
predicted trajectories instead of a single deterministic
prediction, which helps to deal with uncertainty in the
real world. In order to enable the unmanned driving
system to select the most likely trajectory to respond,
the researchers introduced a clustering algorithm that
can extract a set of possible trajectories from the
probability distribution and sort them according to
their probabilities, which can effectively achieve this
goal (Zyner et al., 2019).
Studies have shown that the RNN framework can
classify the activities of objects on the road, and the
activity classification system can effectively identify
specific dangerous situations. RNN can use the
temporal information of the upper and lower parts to
map the input sequence to the output sequence, but
problems arise when the input information decays or
grows exponentially during the recursive connection
process of the network. Long short-term memory
(LSTM) is a structure of RNN that can solve this kind
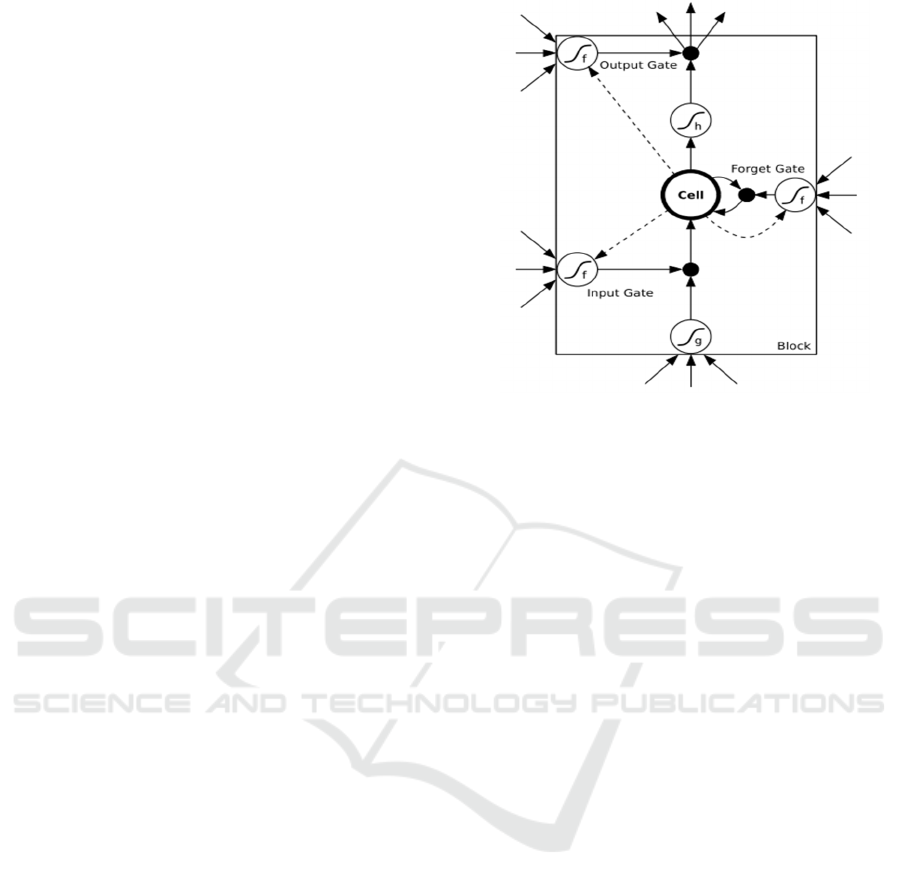
of problem well. For example, as shown in Figure 2,
the vanishing gradient replaces the storage unit of
each node of the network. The storage unit is to
remember and accumulate cells, and the forget gate
determines what proportion of cell memory should be
kept in the next step. The input gate determines
whether the input should be allowed, and the output
gate determines whether the output of the block
should be sent. Unlike general RNN, the back
propagation error in LSTM does not disappear
exponentially over time, and the data is easy to train
(Khosroshahi et al., 2016).
Figure 2: An LSTM Memory Cell (Khosroshahi, et al.,
2016).
3.3 The Role of Deep Reinforcement
Learning Neural Network in
Autonomous Driving Technology
When a car is driving on the road, it is often not
smooth sailing. In the face of some complex road
sections, traditional supervised learning is difficult to
cope with the complex and changing driving
environment. Deep reinforcement learning can
effectively solve this problem by training machines
through interaction with the environment and
learning from mistakes.
The framework of deep reinforcement learning
consists of spatial aggregation, attention model,
temporal aggregation, and planning. This framework
integrates RNNs and uses RNNs to integrate
information on time series. RNNs can remember
previous state information and combine current
observations to infer the true state of the environment.
The attention mechanism is used to process relevant
information and reduce computational complexity.
The spatial bureau aggregation network contains
sensor fusion and spatial features. This network can
process data collected from multiple sensors (such as
cameras and lidars) and extract spatial features
through CNNs. In addition, Bayesian filter
algorithms, such as Kalman filters, are used to
process sensor readings and infer the true state of the
environment. Finally, reinforcement learning
planning is performed through a deep Q network
(DQN) or a deep deterministic policy gradient
(DDAC) algorithm. Studies have shown that the
framework was tested on the open source 3D racing
MLSCM 2024 - International Conference on Modern Logistics and Supply Chain Management
96

simulator TORCS (which provides complex road
curvature and simple interaction scenarios), and the
experimental results show that the proposed
framework is able to learn to drive autonomously in
these complex scenarios (Sallab et al., 2017).
4 CHALLENGES OF AI IN THE
FIELD OF AUTONOMOUS
DRIVING AND FUTURE
SOLUTIONS
Looking back at history, any emerging product will
face challenges in a certain era. For example, the
textile machines that appeared in the first industrial
revolution replaced workers, causing many workers
to lose their jobs. Similarly, driverless technology
will face similar situations in modern times.
Driverless cars will replace taxis. Especially with
the support of AI technology, driverless technology
will advance by leaps and bounds, which will make
people feel more and more uneasy. It will inevitably
face many challenges in the future.
4.1 Challenges of AI in Autonomous
Driving
4.1.1 The challenge Comes from AI Itself
AI systems must ensure that they can make safe
decisions in all situations. However, even though
driverless technology is gradually maturing with the
help of AI, it is still impossible to guarantee the safety
of road driving 100%, which highlights the lack of
AI's ability to understand and process complex traffic
environments. In addition, when in harsh
environments, it is difficult for sensors to obtain real-
time road conditions, resulting in AI being unable to
process data in a timely manner. At the same time,
improving the safety of AI systems requires a large
amount of data for training.
The cost of obtaining and processing data is
sometimes too high, and the manufacturing and
maintenance costs of autonomous vehicles are high.
Costs need to be reduced before they can be
popularized. When obtaining user data, many people
also say that their privacy rights are violated. AI
systems are very likely to be attacked by cyber
attacks, and there is currently no strong network
security protection system to maintain the safety of
AI autonomous driving.
4.1.2 The Challenge Comes from Society
AI driverless cars will face serious challenges in
society, especially ethical challenges. First of all,
people will not trust their lives to a machine to
manage, and many drivers cannot overcome the
psychological barriers brought by AI driverless cars.
In addition, driverless taxis are slowly squeezing the
living space of human drivers.
For example, China's Turnip Express has 6,000
orders every day in Wuhan, triggering a technological
ethics crisis. People are afraid that drivers will lose
their jobs after full popularization (Nair, 2024). The
most important thing is that the government does not
have a fair and transparent regulatory framework and
legal documents for AI driverless cars.
Each country has a very different way of
regulating driverless technology. For example, Japan
allows Level 4 autonomous vehicles, provided that
they comply with strict safety standards, while the
United States adopts a state-by-state approach. Some
states such as Arizona are very open to autonomous
vehicle testing. Faced with such a complex regulatory
chaos, it is a problem for some multinational travelers
(US, 2024).
4.2 Suggestions for Future AI
Driverless Technology
First, in the face of a complex regulatory
environment, governments need to communicate and
implement unified regulatory standards, including
who will supervise and how government officials will
supervise. A clear legal system needs to be
established. When faced with a car accident, the legal
responsibilities of both parties need to be quickly
clarified.
The government needs to formulate relevant laws
and regulations to ensure that people's living
standards are not negatively affected by AI in order
to deal with the moral and ethical dilemmas of social
personnel. Secondly, the privacy of user data needs to
be adequately protected so that users do not have to
worry about their personal information being stolen
while experiencing unmanned driving (West, 2016).
Finally, researchers should be committed to
innovation, research more powerful sensors to
improve Ai's ability to process data in extreme
climates, and improve the efficiency and performance
of large AI models, especially for the optimization of
deep learning neural networks, such as research on
lightweight neural network structures such as
MobileNet and EfficientNet, so that they can run
efficiently on vehicle hardware (Oranim, 2024).
Explore the Impact and Key Role of AI Technology in Autonomous Driving
97

5 CONCLUSIONS
AI has made great achievements in the field of
driverless cars. By processing the data from the
sensors of driverless cars, AI can help vehicles make
correct decisions quickly on the road. With the
reinforcement of sensor fusion strategies, AI can
process the obtained data better and faster. AI is
mostly based on deep learning frameworks in
machine learning, such as convolutional neural
networks, recurrent neural networks, and deep
reinforcement learning frameworks, to process the
environment perception, behavior prediction, road
planning, etc. of cars.
Although driverless technology has achieved a
rapid leap with the support of AI, and safety has been
guaranteed to a certain extent, what follows is that
society has doubts about whether AI will have a
negative impact on people's living standards, and
faces serious moral and ethical challenges. In the
future, the government and enterprises need to work
together to deal with this thorny problem.
REFERENCES
Bhardwaj, V., 2024. AI-Enabled Autonomous Driving:
Enhancing Safety and Efficiency through Predictive
Analytics. International Journal of Scientific Research
and Management (IJSRM), 12(02), 1076–1094.
Cameron, H., An, S., Rahmani, H., & Bennamoun, M.
(2019). Deep Learning for Driverless Vehicles. Smart
Innovation, Systems and Technologies, 83–99.
Ignatious, H. A., Sayed, H. E., & Khan, M., 2022. An
Overview of Sensors in Autonomous Vehicles.
Procedia Computer Science, 198, 736–741.
Isaac, L., 2016. DRIVING TOWARDS DRIVERLESS: A
GUIDE FOR GOVERNMENT AGENCIES.
Janiesch, C., Zschech, P., & Heinrich, K., 2021. Machine
learning and deep learning. Electronic Markets, 31(31),
685–695.
Khosroshahi, A., Eshed Ohn-Bar, & Trivedi, M. M. (2016).
Surround vehicles trajectory analysis with recurrent
neural networks.
Liu, T., Du, S., Liang, C., Zhang, B., & Feng, R., 2021. A
Novel Multi-Sensor Fusion Based Object Detection and
Recognition Algorithm for Intelligent Assisted Driving.
IEEE Access, 9, 81564–81574.
Mishrikotkar, A. 2022. Image Recognition by Using a
Convolutional Neural Network to Identify Objects for
Driverless Car. International Journal for Research in
Applied Science and Engineering Technology, 10(2),
1210–1215.
Nair, V. 2024. Baidu Clocks 6,000 Driverless Rides Per
Day in Wuhan, China. AIM.
Sallab, A., Abdou, M., Perot, E., & Yogamani, S., 2017.
Deep Reinforcement Learning framework for
Autonomous Driving. Electronic Imaging, 2017(19),
70–76.
Shahin, A., Salameh, M., Yao, H., & Goebel, R., 2024.
Explainable Artificial Intelligence for Autonomous
Driving: A Comprehensive Overview and Field Guide
for Future Research Directions. IEEE Access, 1–1.
US, T., 2024. Top Autonomous Vehicle Challenges and
How to Solve Them. TaskUs.
West, D., 2016. Securing the future of driverless cars.
Brookings.
Yeong, D. J., Velasco-Hernandez, G., Barry, J., & Walsh,
J., 2021. Sensor and Sensor Fusion Technology in
Autonomous Vehicles: a Review. Sensors, 21(6), 2140.
MLSCM 2024 - International Conference on Modern Logistics and Supply Chain Management
98
