
Towards a Smart Luge that Measures Steering Input of the Rider
Rupert Staudinger
1,2
, Wolfgang Kremser
1,*
, Christoph Thorwartl
1
and Hermann Schwameder
2
1
Salzburg Research Forschungsgesellschaft mbH, Salzburg, Austria
2
Department of Sports and Exercise Science, Paris-Lodron University Salzburg, Austria
Keywords: Body Sensor Networks, Data-Based Training, Luge, Smart Sports Equipment, Winter Sports.
Abstract: Luge is a high-speed Olympic Winter sliding sport that is timed in milliseconds. The athlete’s steering
performance is a crucial factor for success, but there are currently no objective methods to evaluate steering
technique and timing. As a work in progress, we present a lab prototype of the ‘smart luge’, a sled retrofitted
with six unobtrusive commodity force sensors. The results of a laboratory test with five simulated runs show
that the current setup is capable of measuring the athlete’s activity during steering. This work aims to advance
data-supported training in the luge sport by enabling the in situ measurement of luge athletes’ activity.
1 INTRODUCTION
Luge is an Olympic Winter sliding sport in which a
single or a pair of athletes (‘lugers’) compete for the
shortest time riding a sled down an icy track. Luge is
also the name of the sled that is used.
While descending the track, the luger’s main
influence on their runtime is their steering
performance. The ideal strategy is to stay on the
shortest path downward with minimal steering in
terms of frequency and magnitude (Gong et al.,
2016). Lugers experience speeds over 150km/h
(Schleinitz et al., 2022) so the window for optimal
steering action is extremely small. Even minor
mistakes can cost a race considering that run times are
measured in milliseconds (Platzer et al., 2009).
Trainers currently assess their athlete’s on-track
performance using video analysis (e.g. Fedotova &
Pilipivs, 2010). Given the high speeds and subtle
movements involved in luge steering, this form of
subjective feedback is inherently limited.
In some sports, trainers have already started to
complement their observations with objective data
from sensors that are either worn by the athletes or are
integrated into the sports equipment (Rajšp & Fister,
2020). However, such sensors have not yet been
integrated into luge training, and the scientific
literature on this topic is sparse.
To advance data-driven luge training we started
the development of a ‘smart luge’. The goal is to build
a sensor-equipped luge that can accurately and
*
Corresponding Author: wolfgang.kremser@salzburgresearch.at
reliably measure steering input. The resulting data
can be analyzed and visualized to give trainers
detailed and objective information on how to improve
their trainee’s steering. This paper presents the first
milestone of the ongoing project, a lab demonstrator
of the ‘smart luge’.
1.1 The Art of Luge Steering
The basic design of a luge consists of a fiberglass
‘pod’ in which the luger lies in a supine position
during the race. The pod is tightly coupled to the left
and right ‘runners’ at the bottom via a steel frame
called the ‘bridge’. The runners are made out of wood
or fiberglass, and they end in upwards ‘bows’ near the
luger’s calves. At the bottom of the runners are the
‘blades’ made from steel that glide on the ice.
In their neutral position, the runners are slightly
bent towards each other. Lugers steer by twisting
them, which causes the blades to cut a leading grove
that gets followed by the luge. The twisting of the
runners can be achieved by a combination of (a)
applying pressure to a bow using the calf, (b) lifting
the bridge using handles that connect the pod and
bridge, and (c) pressing down with one shoulder
(Pareek et al., 2021). Depending on the desired
direction change, these forces are applied differently
between the left-hand and right-hand sides (Figure 1).
206
Staudinger, R., Kremser, W., Thorwartl, C. and Schwameder, H.
Towards a Smart Luge that Measures Steering Input of the Rider.
DOI: 10.5220/0012999400003828
In Proceedings of the 12th International Conference on Sport Sciences Research and Technology Support (icSPORTS 2024), pages 206-210
ISBN: 978-989-758-719-1; ISSN: 2184-3201
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
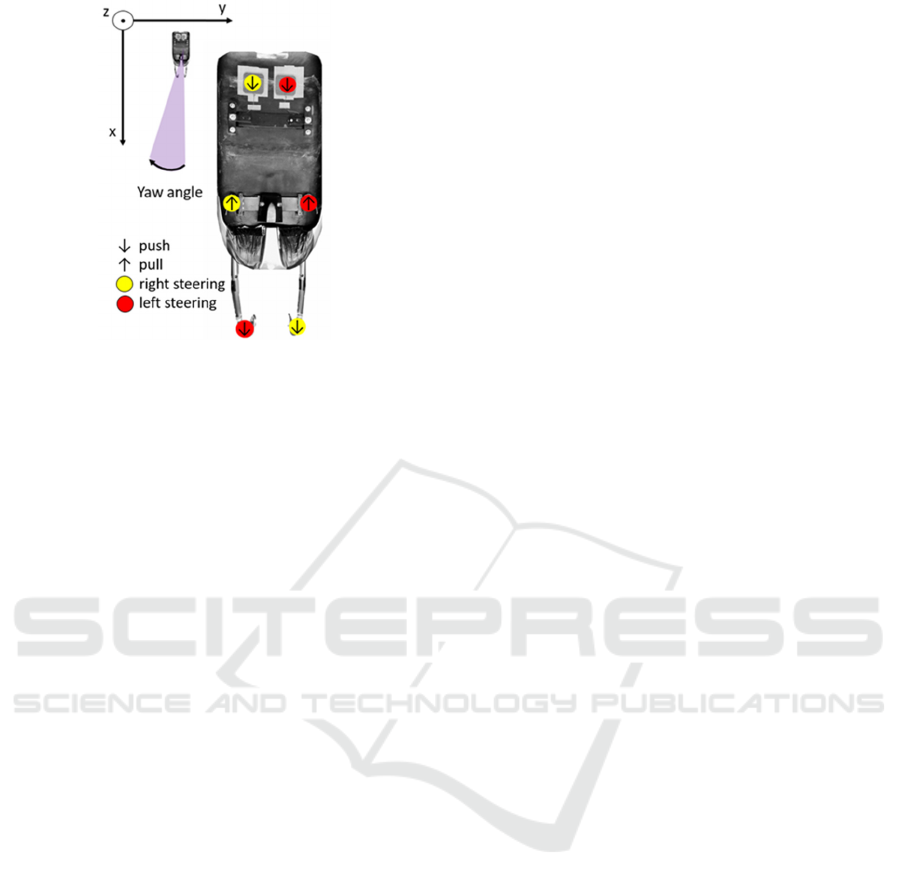
Figure 1: Our luge steering model with the anticipated
pressure points drawn in.
1.2 Aim and Research Questions
The ‘smart luge’ aims to unobtrusively measure these
theoretically derived steering movements using
inexpensive commodity sensors in a laboratory
environment. The objectives are (a) to develop a
sensor-based luge prototype, (b) to calibrate the
sensors, and (c) to capture and analyze basic left-right
steering characteristics in a laboratory setting.
2 METHODS
2.1 Instrumentation
According to our theory of luge steering, we should
be able to detect steering maneuvers by measuring the
pressure that (a) the calves apply to the bows, (b) the
hands apply to the handles, and (c) the shoulders
apply to the pod.
We placed a FlexiForce™ sensor (Tekscan Inc.,
USA) at the anticipated steering points shown in
Figure 1. These sensors are 0.2 mm thin force sensing
resistors (FSR) that increase their electrical
conductance in proportion to the force that is acting
on them. We used the largest FSR model (A502) for
the shoulders, the mid-size model (A401) for the
bows, and the smallest model (A301) for the handles.
We used thin double-sided adhesive tape to attach the
sensors to the bows and the pod. The sensors for the
handles were placed at the interface between the
handles and the bridge.
For data acquisition, we used the KRYPTON®
CPU with two strain gauge modules and the
DewesoftX software (Dewesoft, Slovenia). This
setup recorded the FSR sensors’ voltage outputs at
20kHz. The changes in electrical resistance induced
by the FSR sensors were converted into a reciprocal
proportional output voltage (u
a
). Calibration of the u
a
was achieved through a 2-point calibration method
using standardized weights, ensuring precise force
measurements.
2.2 Study Design
The first author of the present paper who had
participated in an Olympic luge competition was the
test luger for this pilot study (sex: male, weight:
85 kg, height: 188 cm). The instrumented luge was
placed on top of a table such that the luger faced the
wall. We projected a pre-recorded point-of-view
video of a luge run onto that wall. The track in the
video was familiar to the test luger who was asked to
steer as he would if he had been in the video. The
same run was repeated five times. A webcam that was
synchronized with the sensor hardware recorded the
entire study setup.
We noted the frames in which the luger in the
video entered and exited a curve, as well as the
curve’s direction (left, right), and noted them in an
Excel sheet. We excluded the first curve because it
follows the startup phase where the luger is trying to
gain momentum with their hands in a sitting position.
Thus, we did not consider it a regular curve.
Furthermore, we excluded curve 11 (the ‘Kreisel’)
which requires more complex steering motions and
thus would not be comparable to the other curves of
the track.
2.3 Data Analysis
The resulting data was analyzed with MATLAB (The
MathWorks, Inc., USA). For each run, using the
synchronized webcam footage, we discarded all data
that was recorded before the pre-recorded video
started and after it ended. Then we used the curve start
and end points to segment the remaining data. We
normalized the data for each curve to 1000 samples.
Furthermore, each curve was split into three phases:
‘entry’ (0% - 25% of samples), ‘core’ (25%-75%),
and ‘exit’ (75% - 100%). We plotted the average
signal of each of the six FSR sensors, along with the
standard error, across all five runs.
To quantify the (dis)similarity of the sensor
signals we calculated Pearson’s correlation
coefficient (r) for each pair of sensors and each curve
phase’s mean. Coefficients higher than 0.1, 0.3, 0.5,
and 0.7 represent small, moderate, large, and very
large correlations, respectively (Hopkins et al., 2009).
Towards a Smart Luge that Measures Steering Input of the Rider
207
3 RESULTS
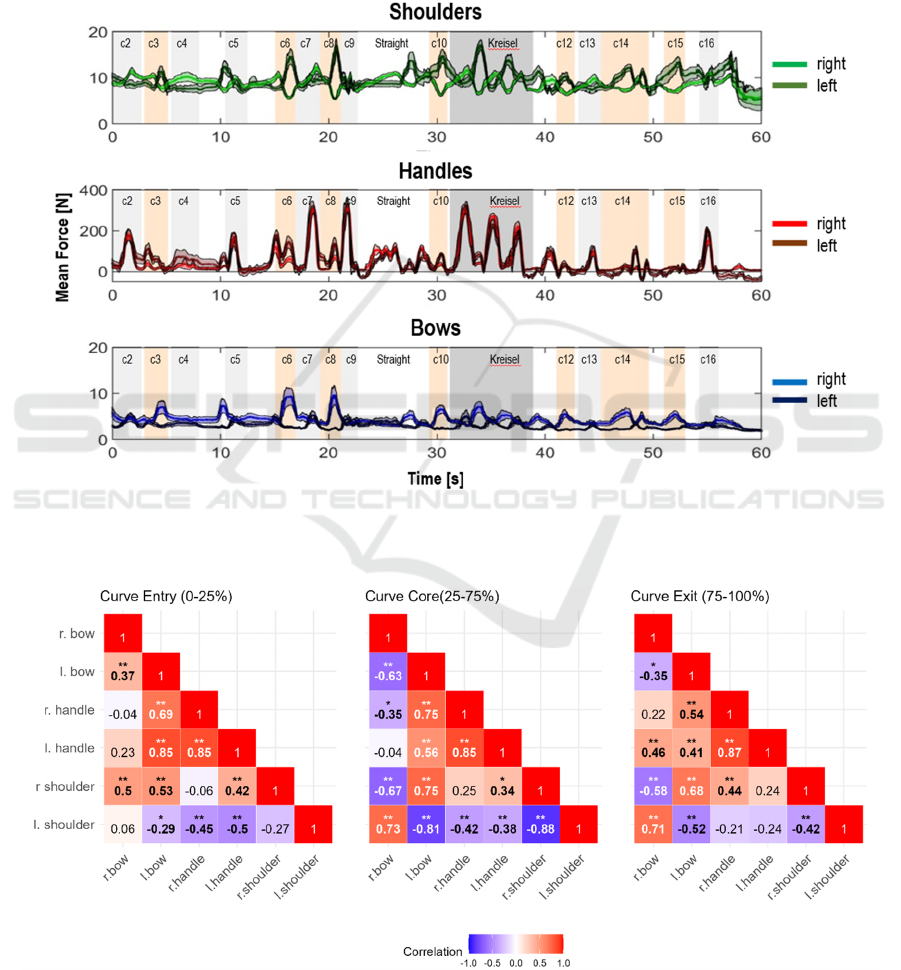
Figure 2 shows the average signal (+/- standard error)
for each sensor with the individual curves colored in.
The maximum values for the bows (left: 12N ± 1,
right: 17N ± 1) and the shoulders (left: 23N ± 3, right:
18N ± 2) differ considerably from the maximum
values of the handles (left: 631N ± 81, right: 404 ±
72).
Figure 3 shows the three correlation matrices, one
for each curve phase. In all three phases, the handles
have a very large correlation (r between 0.85 and
0.87). The left and right shoulders have a consistently
negative correlation (r at entry: -0.27, core: -0.88,
exit: -0.42). The left and right bows show a moderate
positive correlation at curve entry (r=0.37) which
Figure 2: Plots of the calibrated force signal [N] with the standard error of all six FSR sensors averaged over all five runs.
Grey sections mark right curves, orange sections mark left curves. The first curve and the dark gray "Kreisel" section were
excluded from the analysis.
Figure 3: Correlation matrices of the average force signals from the six FSR sensors, grouped by curve phases. Significant
correlations are printed in bold (significance levels *: p < 0.05, **: p < 0.01).
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
208
changes to a negative correlation in the core phase
(r=-0.63) and at the exit (r=-0.35). Furthermore, we
observed that in the core and exit phases, the shoulder
and bow on opposite sides correlate strongly (r
between 0.68 and 0.75) while the shoulder and bow
on the same side have a large negative correlation (r
between -0.81 and -0.52). In general, the mean
absolute r value was highest in the core phase (0.56),
followed by the exit (0.47) and entry (0.41) phases.
4 DISCUSSION
We demonstrated a lab prototype of the ‘smart luge’,
a luge sled that was retrofitted with six FSR sensors
to measure the force that is applied by the luger to
induce steering.
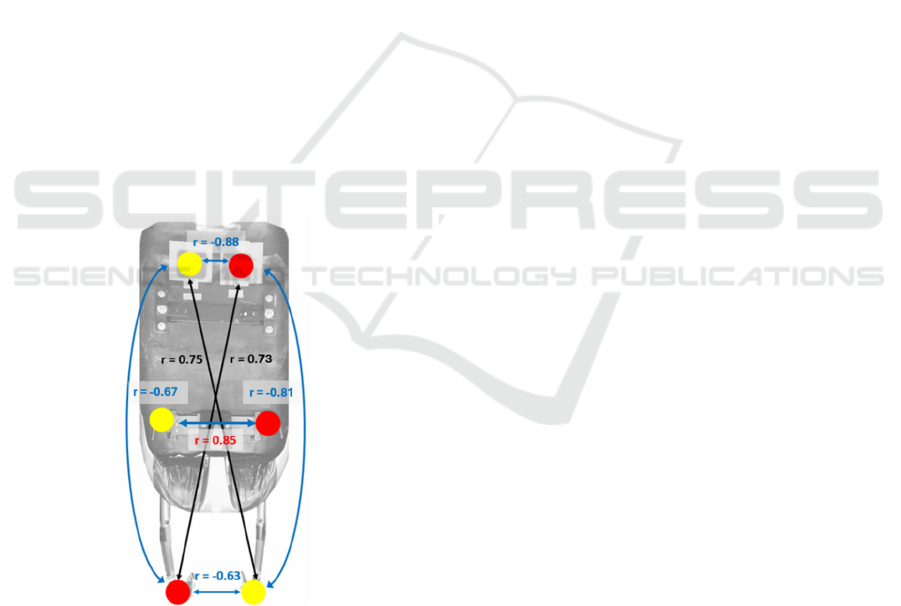
Figure 4 compares the results with our
expectations based on our luge steering model (Figure
1). We found that sensors that we expected to
correlate positively had a very large positive
correlation, and the sensors that we expected to
negatively correlate had a large negative correlation.
What was unexpected were the high peak force values
of the left and right handles) and their continuously
high correlation between the left-hand and right-hand
side.
Figure 4: Correlations between the FSR sensor values in the
core phase. Blue arrows indicate an expected negative
correlation, and black arrows indicate an expected positive
correlation.
One explanation might be the FSR sensor
placement under the screwed-down handles. Since
both handles are tightly coupled with the bridge,
when one handle is pulled, the handle on the opposite
side moves up as well and squeezes the sensor rather
than twisting away as we had expected. Further
attention is necessary to understand the deformations
of the bridge and how they connect to the athlete’s
steering input.
5 CONCLUSION
In light of this pilot study’s results, we consider the
presented ‘smart luge’ demonstrator as capable of
measuring a luger’s steering maneuvers in a
laboratory environment.
The next step would be to test the system on a real
ice track. However, in its current state, the data
acquisition hardware is too bulky to be safely
transported on the luge. Furthermore, because we
expect a considerable amount of vibration on the ice,
a more sophisticated post-processing/filtering of the
FSR sensor signals is likely necessary to detect the
luger’s steering input. Furthermore, we will optimize
the sensors’ surface sizes and geometries to better
detect the applied forces.
REFERENCES
Fedotova, V., & Pilipivs, V. (2010). Biomechanical
Patterns of Starting Technique during Training and
Competitive Events for Junior Lugers. In C. T. Lim &
J. C. H. Goh (Eds.), 6th World Congress of
Biomechanics (WCB 2010). August 1-6, 2010
Singapore (Vol. 31, pp. 282–285). Springer Berlin
Heidelberg. https://doi.org/10.1007/978-3-642-14515-
5_73
Gong, C., Phillips, C. W. G., Rogers, E., & Turnock, S. R.
(2016). Analysis of Performance Indices for Simulated
Skeleton Descents. Procedia Engineering, 147, 712–
717. https://doi.org/10.1016/j.proeng.2016.06.253
Hopkins, W. G., Marshall, S. W., Batterham, A. M., &
Hanin, J. (2009). Progressive Statistics for Studies in
Sports Medicine and Exercise Science. Medicine &
Science in Sports & Exercise, 41(1), 3–12.
https://doi.org/10.1249/MSS.0b013e31818cb278
Pareek, A., Martin, R. K., & Engebretsen, L. (2021). Luge,
bobsleigh, skeleton. In S. Rocha Piedade, P. Neyret, J.
Espregueira-Mendes, M. Cohen, & M. R. Hutchinson
(Eds.), Specific sports-related injuries (pp. 329–339).
Springer International Publishing. https://doi.org/10.
1007/978-3-030-66321-6_23
Platzer, H.-P., Raschner, C., & Patterson, C. (2009).
Performance-determining physiological factors in the
luge start. Journal of Sports Sciences, 27(3), 221–226.
https://doi.org/10.1080/02640410802400799
Rajšp, A., & Fister, I. (2020). A Systematic Literature
Review of Intelligent Data Analysis Methods for Smart
Towards a Smart Luge that Measures Steering Input of the Rider
209

Sport Training. Applied Sciences, 10(9), 3013.
https://doi.org/10.3390/app10093013
Schleinitz, J. V., Wörle, L., Graf, M., & Schröder, A. (2022).
Modeling ice friction for vehicle dynamics of a bobsled
with application in driver evaluation and driving
simulation. Tribology International, 165, 107344.
https://doi.org/10.1016/j.triboint.2021.107344.
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
210
