
Research on Maneuver Decision of Unmanned Combat Aerial
Vehicles Based on Segmented Reward Function and
Improved Deep Q-Network
Juntao Ruan
1,2
, Yi Qin
2
, Fei Wang
3
, Jianjun Huang
1
, Fujie Wang
2
, Fang Guo
2
and Yaohua Hu
2
1
College of Electronics and Information Engineering, Shenzhen University, Shenzhen, China
2
School of Electrical Engineering and Intelligentization, Dongguan University of Technology, Dongguan, China
3
Harbin Institute of Technology, Shenzhen, China
Keywords: UCAV, Segmented Reward Function, EKF, DQN, Maneuvering Decision-Making.
Abstract: Intelligent air combat is the main trend in the future, and the maneuvering decision-making ability of
Unmanned combat aerial vehicles (UCAVs) affects the win-lose ending of the air battlefield. In order to
study the problem of maneuver decision-making in UCAV 1V1 air combat, this paper proposes a maneuver
decision generation algorithm based on the fusion of segmented reward function and improved deep Q-
network. Firstly, this paper establishes a real mathematical model problem in the complex environment of
air combat, and provides an equation expression that describes the spatial coordinate information, attitude
information velocity information of the current state of UCAVs. This expression can provide basic
maneuvering action instructions after passing the overload coefficient. Then, a segmented reward function
was designed to guide unmanned aerial vehicles to develop towards their own advantages in the turn of
aerial combat. Aiming at the problem of parameter uncertainty of deep Q-network (DQN) in maneuver
decision-making process, an improved deep Q-network algorithm is proposed in the next. By introducing
the extended Kalman filter (EKF), the uncertain parameter values of the strategy network are used to
construct the system state equations, the parameters of the target network are used to construct the
observation equations of the system, and the optimal parameter estimates of the DQN are obtained through
the iterative updating solution of EKF. Simulation experiments show the effectiveness of the designed
segmented reward function and the improved deep Q-network algorithm in autonomous maneuvering
decision-making for UCAVs.
1 INTRODUCTION
With the development of artificial intelligence
technology, the traditional form of war is evolving in
the direction of intelligence. As a typical equipment
of intelligent weapons, unmanned combat aerial
vehicles (UCAV) are likely to gradually replace
manned combat aircraft in the future and step by
step become the protagonist of future intelligent air
warfare (Cao et al., 2019). The intelligence of
UCAVs is mainly reflected in their autonomous
maneuvering decision-making ability in air combat,
which has received widespread attention. In future
intelligent air combat, the maneuvering decision-
making ability of UCAVs determines the outcome of
aerial combat. The autonomous maneuvering
decision-making of UCAVs in air combat essentially
relies on algorithms to evaluate the current air
combat situation and judge the quality of the current
combat environment (Zhang, 2022). Then, based on
the combat objectives and their own mobility, they
make maneuvering actions to achieve tactical attacks
or evasion effects. The autonomous maneuvering
decision-making use of aircrafts can improve the
aircraft's penetration and survival capabilities,
flexibility in executing complex tasks, and enhance
its concealment and adaptability (Yang et al., 2019).
Deep reinforcement learning (DRL) is a type of
artificial intelligence algorithm that is closer to
human thinking patterns. It can leverage the
advantages of deep learning in perceptual ability and
reinforcement learning in decision-making
problems. The combination of deep reinforcement
learning and UCAVs is an important trend in the
development of future air combat, which has a
94
Ruan, J., Qin, Y., Wang, F., Huang, J., Wang, F., Guo, F. and Hu, Y.
Research on Maneuver Decision of Unmanned Combat Aerial Vehicles Based on Segmented Reward Function and Improved Deep Q-Network.
DOI: 10.5220/0012911900004536
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Data Mining, E-Learning, and Information Systems (DMEIS 2024), pages 94-101
ISBN: 978-989-758-715-3
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
profound impact on enhancing military capabilities
and tactical innovation (Meng et al., 2022).
Recently, deep reinforcement learning technology
has made many improvements in algorithm theory,
forming a logically rigorous theoretical
foundation(Mnih et al., 2013). Scholars at home and
abroad have also made attempts to address the issue
of maneuver decision-making for UCAV, and have
achieved many results. The traditional methods for
generating maneuver decisions focus on expert
systems and matrix game algorithms. In addition,
artificial intelligence algorithms such as genetic
algorithms and particle swarm optimization
algorithms have also been applied in the field of
UCAV maneuver decision generation (Ernest et al.,
2016). However, the state of the air combat
environment has the characteristics of large space
and continuity, and the process of maneuver
decision-making still has research value (Sun et al.,
2009).
In this paper, based on the deep reinforcement
learning model elements to complete the abstract
modeling of intelligences, environments and actions,
the segmented reward function is redesigned to help
guide the unmanned fighter jet to select the correct
action. The accuracy of the output action value
function is ensured by introducing the extended
Kalman filter (EKF) to filter the parameters of the
deep Q network (DQN). On the basis of the DQN,
the system state equation is constructed using the
uncertain parameter values of the policy network,
the observation equation of the system is constructed
using the parameters of the target network, and the
optimal parameter estimation value of the DQN is
obtained by iteratively updating the EKF. Simulation
experiment show that the designed segmented
reward function and the DQN algorithm fused with
EKF are effective and reliable in autonomous
maneuver decision-making methods.
2 AIR COMBAT ENVIRONMENT
MODELING
2.1 Maneuvering Equations of UCAV
The maneuvering trajectory of UCAVs during air
combat can be seen as the result of each aircraft's
maneuvering command execution. The intuitive
manifestation of the maneuvering process of
UCAVs is the change in the trajectory of the
aircraft's maneuvering actions and the change in its
own attitude (Kung, 2018)
. UCAVs are objects that
are moving in the air and cannot be simply treated as
a particle. During the entire process of flying in the
air, for the position or azimuth relationship of the
movement, the aircraft can be treated as a particle
for speed or azimuth discrimination. The Euler angle
defines the attitude of an aircraft in three-
dimensional space, and the motion parameters of an
UCAV should also include the position information
of the aircraft in three-dimensional space, as well as
the velocity parameters of the aircraft. The
establishment of motion parameters helps to
describe the motion state of the aircraft, laying the
foundation for the subsequent control and maneuver
decision trajectory generation of UCAVs.
O
g
x
g
y
g
z
Figure 1: Ground coordinate system.
The kinematic equation of the aircraft's center of
mass can represent the relationship between the
aircraft's spatial position and time, meaning that the
aircraft's center of mass changes over time. The
equation set expression is defined as (1). In general,
this system of equations is established in a ground
coordinate system, as shown in Fig. 1.
cos cos
cos sin
sin
dx
V
dt
dy
V
dt
dz
V
dt
θ
ψ
θ
ψ
θ
=⋅ ⋅
=− ⋅ ⋅
=⋅
(1)
where
x
,
y
, and
z
respectively represent spatial
coordinate values.
θ
and
ψ
represent the pitch angle
and yaw angle of the UCAV, respectively.
mg
θ
P
D
V
γ
Figure 2: Force analysis of UCAV.
For the convenience of research, it is assumed that
the thrust of the unmanned fighter jet engine always
Research on Maneuver Decision of Unmanned Combat Aerial Vehicles Based on Segmented Reward Function and Improved Deep
Q-Network
95

follows the direction of velocity, and the unmanned
fighter jet will not experience sideslip motion during
flight, without considering the impact of the angle of
attack on it (Kong et al., 2020). In addition, the land
in the flying airspace is a spatial plane. The force
analysis diagram of the UCAV in the air is shown in
Fig. 2. P represents the thrust of the aircraft engine,
D represents the resistance experienced by the
aircraft, and L represents the lift of the aircraft.
Given the above assumptions, a simplified system of
aircraft motion dynamics equations can be derived.
The expression of the aircraft motion dynamics
equation is shown in (2). Although it has been
simplified, it still helps to study the maneuvering
and flight trajectory problems of UVAVs.
sin
cos cos
cos sin
dV
mPDmg
dt
d
mV L mg
dt
d
mV L
dt
θ
θ
γ
θ
ψ
θγ
=−−
=⋅ − ⋅
−⋅ =⋅
(2)
Where,
γ
is the roll angle of UCAV. The first
equation in the system represents the change in
aircraft speed. The second and third equations
represent the changes in pitch angle
θ
and yaw
angle
ψ
of UCAV in the vertical plane, respectively.
When flying in the air, the aircraft is subjected to
external forces such as engine thrust, air lift, and its
own gravity. The overload coefficient can express
the ratio of the combined external force of an UCAV,
excluding gravity, to the gravity acting on the
aircraft. The expression formula is shown in (3).
cos
sin
x
y
z
PD
n
mg
L
n
mg
L
n
mg
γ
γ
−
=
⋅
=
⋅
=
(3)
where
x
n
is the tangential overload of the aircraft,
along the direction of velocity.
y
n and
z
n
are
perpendicular to the direction of velocity. The
combination of
y
n and
z
n
defines the normal
overload
f
n , as shown in (4).
22
fyz
L
nnn
mg
=+=
(4)
Substituting tangential overload and normal
overload into the motion dynamics equation of the
UCAV can be obtained in (5).
(sin)
(cos cos)
sin
cos
x
f
f
dV
gn
dt
dg
n
dt v
dg
n
dt V
θ
θ
γ
θ
ψ
γ
θ
=−
=−
=− ⋅
⋅
(5)
where, the first equation in (5) describes the
relationship between the change in aircraft speed and
the tangential overload of the aircraft when the pitch
angle is determined; The second and third equations
of the system explain the influence of normal
overload and roll angle on the pitch and yaw angle
changes of the aircraft, respectively.
If the tangential overload, normal overload, and
roll angle are set properly, the basic flight actions of
the UCAV can be obtained based on the numerical
values of these variables. Therefore, based on the
size of the variable values, 11 basic aircraft
maneuvers can be selected, among which maneuvers
involving overload are all carried out at maximum
overload.
Figure 3: Basic maneuvers of UCAV.
The flight maneuver trajectories in Fig. 3
represent respectively the UCAV maintaining a
constant speed forward flight, accelerating forward
flight, decelerating forward flight, turning left
horizontally, turning right horizontally, push down
on a vertical plane, pull up on a vertical plane, push
down in the downward left direction, pull up in the
upward left direction, push down in the downward
right direction, and pull up in the upward left
direction.
2.2 Air Situation Assessment
The UCAV fighting process in air combat is variable
and complex. In the one-on-one fighting between the
red and blue sides, the respective UCAVs need to
assess the current combat environment in order to
make reasonable and effective maneuvers to put
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
96
themselves in the advantageous side of the battle and
avoid being attacked by the local area. In addition,
the air combat situation assessment is a dynamic
process, the current situation value will be changed
with the UCAV maneuvers, which requires the
situation evaluator to conduct real-time correct
assessment of the current air.
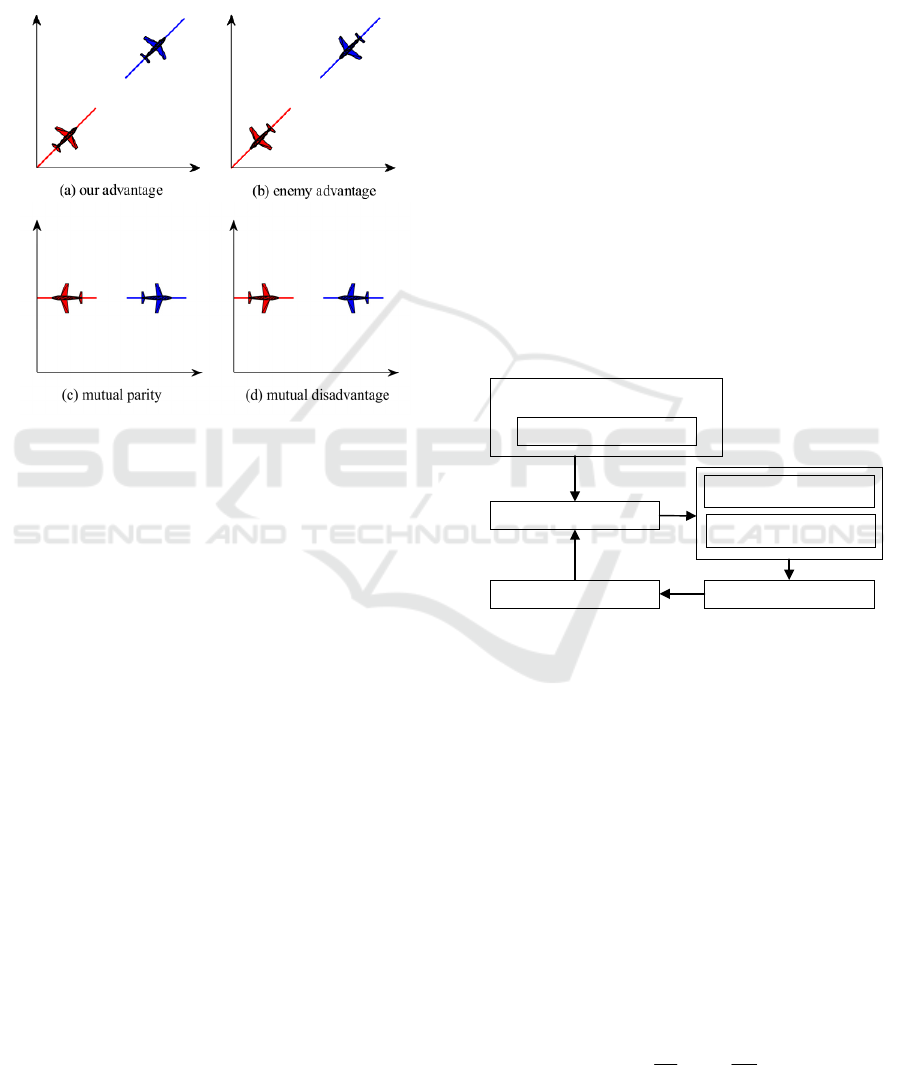
Figure 4: Situation types of air combat.
The geometric orientation relationship between
the two UCAVs describes the current type of
situation in the air, where two are closely related.
Based on this two-angle relationship the situational
types of air combat are categorized into four types,
as shown in Fig. 4: our advantage, enemy advantage,
mutual parity, and mutual disadvantage. The
selection of the situational type is helpful for
subsequent reward evaluation, rapid adjustment of
maneuver strategies, and improvement of efficiency.
3 MANEUVERING
DECISION-MAKING
ALGORITHM
3.1 Maneuvering Decision-Making
Process
The OODA loop is named after the combination of
the first letters of four words: observation,
orientation, decision and action. In the research of
UCAV maneuvering decision-making, the OODA
loop provides a strong and powerful framework to
help understand and guide the maneuver decision
process. During the observation phase, UCAVs need
to collect real-time information from the air combat
environment, including location information of
enemy or friendly states and spatial environment
information. In the judgment stage, UCAVs need to
combine some past experiences, lessons learned or
theoretical knowledge, learn to analyze the
information obtained during the observation stage,
understand their own environment, and predict
future development trends, providing a basis for the
next decision-making process. In the decision-
making stage, the UCAV makes the best maneuver
decision based on the judgment from the previous
step. This decision should either achieve the
established goals and tasks or eliminate temporary
dangerous situations. In the action phase, UCAVs
perform selected maneuver actions on the decision-
making phase to make changes to their current state.
Subsequently, the unmanned aerial vehicle once
again entered the observation phase to verify the
effectiveness of maneuver decisions and make
timely adjustments according to requirements. So,
the UCAV maneuvering decision-making process is
shown in Fig. 5 below.
Air combat environment initialization
Air situat ion assess ment
UCAV model initialization
Maneuver action execution
Status environment update
Maneuver action selection
Reward information update
Figure 5: Maneuvering decision-making process.
3.2 Segment Reward Function Design
The design of reward function is the core of the
entire intelligent agent learning process. The reward
function defines the target for each maneuver of an
UCAV in intelligent air combat. A reasonable
reward function can guide our aircraft's maneuvers
towards a greater advantage until we successfully
shoot down the enemy. The energy concentration of
aircraft in air combat is reflected in gravitational
potential energy and kinetic energy. Based on the
positional relationship between two aircraft in air
combat situation assessment, the reward function
design is divided into four parts: angle reward
function, velocity reward function, altitude reward
function, and distance reward function.
cos( ) cos( ) 1
22
a
att esc
r =+ −
(6)
Research on Maneuver Decision of Unmanned Combat Aerial Vehicles Based on Segmented Reward Function and Improved Deep
Q-Network
97

where,
a
r
is angle reward value.
att
is the angle
between the connection between the red-blue aircraft
and our flight speed.
esc
is the angle between the
connection between the blue-red aircraft and the
enemy's flight speed.
*
**
tan ,
||
2tan ,
h
h
others
k
r
hh
hhorhh
k
Δ
=
Δ−
−Δ>Δ<
(7)
where,
h
r
is altitude reward value. hΔ is the
height difference between two aircraft, and
*
h
represents the upper and lower limits of the height
difference. Once this limit is exceeded, a certain
punishment reward will be given. In addition,
k in
(7) represents an adjustment parameter that can assist
in correcting the shape of the reward function curve.
The velocity reward function and altitude reward
function of an UCAV can be calculated using the
same method, as they both represent different forms
of aircraft energy. Velocity reflects kinetic energy,
while altitude reflects gravitational potential energy.
Therefore, the velocity reward function is shown in
(8).
*
**
tan ,
||
2tan ,
v
v
others
k
r
vv
vvorvv
k
Δ
=
Δ−
−Δ>Δ<
(8)
The distance reward function is used to guide
enemy UCAV to fall into the attack direction of our
side. Once the distance between two UCAVs is too
large, the aircraft's maneuvering decision-making
actions will become meaningless.
*2
2
()
**
2
1,
1,
dd
d
eddordd
r
others
σ
−
−
−Δ> Δ<
=
(9)
where,
*
d
represents the boundary value of the
optimal attack interval.
σ
is one of the parameters of
an exponential function, which can achieve scaling
transformation of distance rewards, but the trend of
curve change remains unchanged.
Based on the four segmented sub reward
functions mentioned above, the average sum can be
used to obtain a single step comprehensive reward
for the maneuvering action of an UCAV.
3.3 Improved Deep Q-Network
Deep Q-network (DQN) is an algorithm that
combines deep learning and reinforcement learning.
It was proposed by DeepMind's research team in
2015 to solve decision problems with high-
dimensional observation spaces (Kumar et al., 2021).
The core idea of DQN is to use deep neural
networks to approximate the Q function, which is
the value function and predicts the expected return
that can be obtained by taking specific actions under
a given state. By leveraging the excellent ability of
DQN in dealing with high-dimensional spatial
problems, we use DQN to characterize the one-on-
one combat environment between red and blue sides.
The state space s is composed of parameters such as
the flight speed, three-dimensional coordinate
information, and attitude related Euler angles of
UCAV. Action a is the action that an UCAV needs
to take after sensing a change in the air combat
situation, and can be selected from the basic set of
UCAV maneuver instructions.
So, using the standard DQN algorithm for UCAV
maneuvering decision-making will follow the
following three steps, as follows.
Step 1: Initialize. Set the motion parameters of the
red and blue aircrafts. Initialize an experience pool
to store combat trajectory information for each
episode. Initialize the Q-network (main network)
and the target Q-network (target network), both of
which have the same architecture but different
parameters.
Step 2: Maneuver action. Based on the current
status, use ε-greedy strategy selects a maneuver.
Then, we observe the single step reward and new
state. Store the experience set (state, action, reward,
new state) in the experience pool.
Step 3: Learn and train. Randomly sample a small
batch of experiences from experience pool. For each
experience sample, calculate the target Q value.
Calculate the loss function using these target Q
values and the current predicted Q values of the
main network. By using gradient descent to update
the weights of the main network, the goal is to
minimize the difference between the predicted Q
value and the target Q value, in order to minimize
the loss function.
Although DQN introduces the target network to
provide a relatively stable learning objective, the
target Q value changes with the update of online
network parameters, which may lead to unstable
learning processes. Therefore, we introduce
extended Kalman filtering (EKF) into the model of
deep Q-networks to solve the problem of parameter
uncertainty. EKF is an algorithm used for state
estimation of nonlinear system (Zhou et al., 2020). It
is a nonlinear version of the Kalman filter, which
approximates the state transition and observation
model of a nonlinear system by using Taylor series
expansion. The goal of reinforcement learning is to
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
98
learn a Q function, denoted
(, ; )Qsa
θ
. We can
consider the network parameters as the system states
and the Q values as observations, and thus use the
EKF to infer and update the network parameters.
The state and observation equations are shown in
(10) below.
1
(, )
(,) (,;)
ttttt
ttt tttt
f
zh v Qsa v
θθωθω
θθ
+
==+
== +
(10)
where,
t
represents the time step.
t
ω
is process
noise in the state equation
t
θ
, following a normal
distribution
(0, )
N
Q
;
t
v
is the measurement noise in
observation equation
t
z
, following a normal
distribution
(0, )
N
R
.
|
t
f
t
F
θ
θ
∂
∂
=
(11)
|
t
f
t
G
ω
θ
∂
∂
=
(12)
For the observation model, the Jacobian matrix
t
H
is shown in (13).
|
t
h
t
H
θ
θ
∂
∂
=
(13)
Use the linearized state transition model to
predict the state of the next time step, as shown in
(14).
|1tt t
ttt
FG
θθω
−
=+
(14)
The covariance of the predicted state estimation
is shown in (15).
|1
T
tt t t t t
PFPFQ
−
=+
(15)
where,
t
P
is the covariance matrix of the previous
time step, and
t
Q
is the covariance matrix of the
process noise.
In the observation update step, it is necessary to
calculate the observation residual using the (16).
Calculate the Kalman gain K as shown in (17).
|1
(,)
tt
tt t
yzh v
θ
−
=−
(16)
1
|1 |1
()
TT
t ttt tttt t
KPHHPH R
−
−−
=+
(17)
where,
t
R
is the covariance matrix of the
observation noise. Using Kalman gain, the EKF
updates the state estimates, making the estimates
closer to the actual observations. Update formula
such as (18).
|1ttt
tt
Ky
θθ
−
=+
(18)
Finally, update the covariance matrix of the state
estimation, which takes into account the impact of
observation updates on uncertainty, as shown in (19)
|1
()
ttttt
PIKHP
−
=− (19)
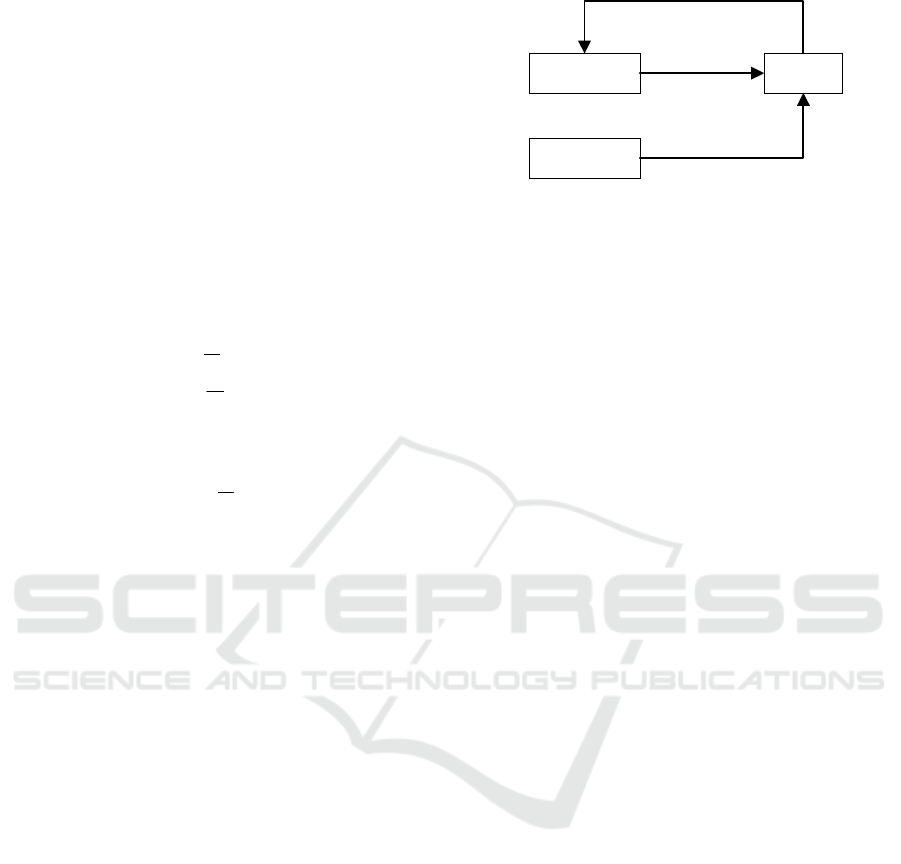
Current
Q-network
Target
Q-network
EKF
ˆ
θ
(, ; )
ttt
Qs a
θ
t
θ
t
z
Figure 6: Structural diagram of the combination of DQN
and EKF.
Overall, the implementation method for
improving deep Q-network is to combine the direct
copying process of DQN parameters with an EKF.
At the beginning of the network training, the state
and observation equations of the EKF are
constructed using the parameters
θ
and
(, ; )
ttt
Qs a
θ
of the Q-network at the moment t. The Kalman gain
of the extended Kalman filter is used to estimate the
true parameters of the Q network. By continuously
iterating and updating the Kalman gain, the error in
obtaining true parameter estimates is minimized.
Finally, the filtered Q-network parameters are
transmitted to the target network to improve the
effectiveness of UCAV maneuver decision-making.
The algorithm flowchart combining DQN and EKF
is shown in Fig. 6.
4 SIMULATION EXPERIMENTS
4.1 Simulation Environment Setting
In the simulation combat phase, our UCAV is
represented in red, while the enemy is represented in
blue. The combat flight trajectory of two aircrafts is
a continuous process, but it requires setting
termination conditions for each combat turn. In the
simulation process, the maneuver decision cycle of
the UCAV is 0.25 second, which means there are
four opportunities to change the maneuver action
every minute. Each air combat episode needs to have
a termination condition, otherwise the training of the
Q-network cannot proceed. The maximum number
of maneuvering steps for an air combat episode is
250. When reaching 250 steps, forcibly withdraw
from the current episode of combat, hoping that the
final trained network can quickly determine the
winner in air combat. So, the rules for determining
the winner are as follows. If the attack angle of our
UCAV is less than 60 ° and the escape angle is less
than 30 ° within the limited number of maneuver
Research on Maneuver Decision of Unmanned Combat Aerial Vehicles Based on Segmented Reward Function and Improved Deep
Q-Network
99
decision steps, and our side meets the appeal
conditions for more than 9 maneuver steps within
this attack range, it will be judged as our victory and
the current combat round will end. This situation is
similar to the radar of airborne weapons firmly
locking enemy aircraft.
Additionally, in one-on-one air combat, it is
assumed that the maneuver ability of two aircraft is
consistent. The DQN adopts the ε-greedy strategy
for early exploration, and begins to reduce the
degree of exploration after the experience pool is
full. The DQN discount return is 0.9, the learning
rate is 0.008, and the experience pool capacity is
20000. After storing 1000 samples, start training the
Q-network, with a sample size of 64 extracted each
time. The target network is updated every 4 air
combat episodes.
In order to ensure that UCAVs can learn
excellent maneuver decision-making experience in
the network, red and blue aircrafts were designed to
be in a mutually parity situation. In the initial stage,
both the red and blue sides have the same flight
speed and altitude. But their initial flight direction is
in the same straight line and opposite. The starting
parameters of the UCAVs are shown below.
Table 1: UCAV initial value setting in heading dilemma.
Initial
Va lu e
v
/
m
s
-1
(, ,)
x
yz
/ m
(, ,)
θ
ψγ
/
rad
Red
250 (0,0,6000)
(0,
4
π
−
,0)
Blue
250 (2000,2000,6000)
(0,
3
4
π
−
,0)
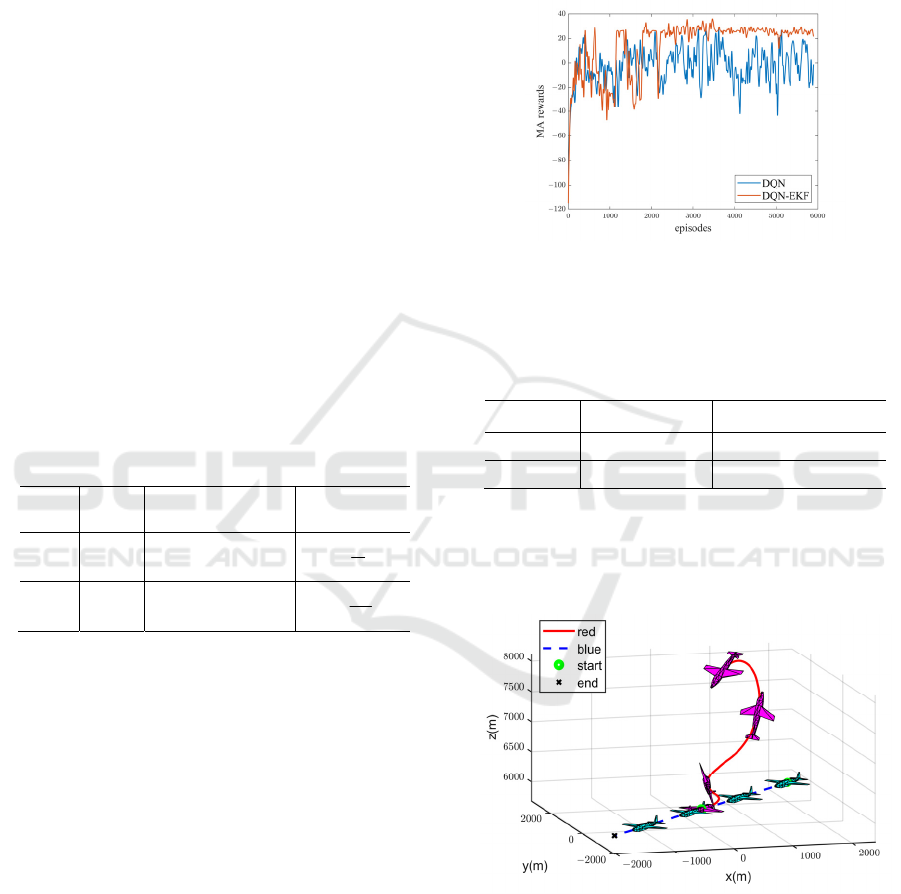
4.2 Simulation Experiment Analysis
Train the UCAV maneuver decision generation
algorithm according to the designed motion
parameters and the preset parameters of the Q-
network. After 6000 rounds of training, the average
episode reward value during the training process was
obtained. The comprehensive reward curve for our
UCAV's turn is shown in Fig. 7. The blue curve in
figure represents the unmodified DQN training
result curve, while the red curve represents the
improved DQN algorithm training result fused with
EKF.
It can be clearly seen from the Fig. 7 that as the
training iterations progress, the average episode
reward value has rapidly improved compared to the
beginning of the training. Because in the initial stage
of training, UCAVs are still in the stage of exploring
the environment. Compared to traditional DQN, the
rewards trained by DQN-EKF method achieve high
returns in the later stages and are also more stable.
The training results demonstrate the feasibility of
DQN-EKF in solving the autonomous maneuver
decision generation problem of unmanned aerial
vehicles.
Figure 7: Reward curve for each episode.
The difference in average episode reward data for
training iterations is shown in Table 2.
Table 2: Algorithm differences data.
algorithm Average reward Standard deviation
DQN
-2.3079 13.9051
DQN-EKF
15.2013 3.7112
In calculating the standard deviation, the average
reward of the second half of the turn was selected.
Because the reward value at the beginning of the
training is rapidly increasing.
Figure 8: Maneuver strategy generated by DQN-EKF.
Save the training model of the network, and for
the red and blue sides in an opposing flight state, the
maneuver trajectory generated by DQN-EKF is
shown in Fig. 8. At the beginning of this round of
battle, the red side first made a left turn maneuver to
get rid of the enemy's attack. Then, the red side
continues to pull up, which can be seen as a typical
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
100

tactical maneuver of completing a somersault. Next,
complete the attack on the enemy during the dive to
level flight phase. The maneuver actions in this battle
round are sufficient to demonstrate the effectiveness
of the maneuver strategy generated by the DQN-EKF
fusion algorithm.
5 CONCLUSIONS
As air combat moves towards intelligence, this paper
conducts research on maneuver decision-making for
UCAVs in close range scenarios, and proposes an
UCAV maneuver decision-making algorithm based
on the fusion of segmented reward functions and
improved deep Q-networks. Specifically, we
conduct mathematical modeling on UCAVs as
intelligent agents for deep reinforcement learning,
and derive the process of aircrafts maneuvering in
the air. A segmented reward function was designed
to guide UCAVs to perform the most advantageous
maneuvers during the turn of aerial combat.
Introducing extended Kalman filtering to solve the
problem of parameter uncertainty in Q-network
maneuver decision-making process, and utilizing
improved deep Q-network to generate maneuver
decisions. Simulation comparative experiments
show that the DQN-EKF algorithm can increase and
stabilize the average turn reward of aerial combat,
providing new ideas for maneuver decision-making
problems. In the future, we can conduct multi
aircraft collaborative research around the attack
missions of unmanned combat aerial vehicle
formations.
ACKNOWLEDGEMENTS
This research is supported by the Guangdong
Provincial Department of Education Innovation
Strong School Program under Grant
2022ZDZX1031 and 2022KTSCX138, by R&D
projects in key areas of Guangdong Province,
2022B0303010001, by National Natural Science
Foundation of China under Grant 62203116 and
62103106.
REFERENCES
Cao, Y., Wei, W., Bai, Y., Qiao, H., 2019. Multi-base
multi-UAV cooperative reconnaissance path planning
with genetic algorithm. Cluster Comput, vol. 22, no.
s3, pp. 5175-5184.
Zhang, Y., 2022. Accuracy assessment of a UAV direct
georeferencing method and impact of the
configuration of ground control points. Drones, vol. 6,
no.2, pp.30.
Yang, Q. , Zhang, J. , Shi, G., Hu, J., Wu, Y., 2019.
Maneuver decision of UAV in short-range air combat
based on deep reinforcement learning. IEEE Access,
vol. 8, pp. 363-378.
Meng, H., Sun, C., Feng, Y., Fang, Q., 2022. One-to-one
close air combat maneuver decision method based on
target maneuver intention prediction. In 2022 IEEE
International Conference on Unmanned Systems
(ICUS), Guangzhou, China: IEEE, pp. 1454-1465.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., Riedmiller, M., 2013.
Playing atari with deep reinforcement learning. arxiv
preprint arxiv:1312.5602.
Ernest, N., Carroll, D., Schumacher, C., Clark, M., Cohen,
K., Lee, G., 2016. Genetic fuzzy based artificial
intelligence for unmanned combat aerial vehicle
control in simulated air combat missions. Journal of
Defense Management, vol. 6, no. 1, pp. 2167-0374.
Sun, Y., Zhou, X., Meng, S., 2009. Research on
maneuvering decision for multi-fighter cooperative air
combat. In 2009 International Conference on
Intelligent Human-Machine Systems and Cybernetics,
Hangzhou, China: IEEE, 2009, pp. 197-200.
Kung, C., 2018. Study on consulting air combat simulation
of cluster UAV based on mixed parallel computing
framework of graphics processing unit. Electronics,
vol. 7, no. 9, pp. 160-184.
Kong, W., Zhou, D., Yang, Z., Zhang, K., Zeng, L., 2020.
Maneuver strategy generation of ucav for within visual
range air combat based on multi-agent reinforcement
learning and target position prediction. Applied
Sciences, vol. 10, no. 15, pp. 5198.
Kumar, S., Punitha, S., Perakam, G., Palukuru, V. P.,
Raghavaraju, J., Praveena, R., 2021. Artificial
intelligence (AI) prediction of atari game strategy by
using reinforcement learning algorithms. In 2021
International Conference on Computational
Performance Evaluation (ComPE), Shillong, India:
IEEE, 2021, pp. 536-539.
Zhou, Y., Ozbay, K., Cholette, M., Kachroo, P., 2020. A
mode switching extended kalman filter for real-time
traffic state and parameter estimation. In 2020 23rd
IEEE International Conference on Intelligent
Transportation Systems(ITSC), Rhodes, Greece: IEEE,
2020, pp. 1-8.
Research on Maneuver Decision of Unmanned Combat Aerial Vehicles Based on Segmented Reward Function and Improved Deep
Q-Network
101
