
Analysis of an Event-Driven Data Relay Based Approach in Ramp
Patrols
Yongsheng Shi and Yue Zhang
College of Aeronautical Engineering, Civil Aviation University of China, Tianjin, China
Keywords: Event-Driven Architecture, Application Layer, Information Delay.
Abstract: Aiming at the data relaying task of multiple devices in ramp inspection, this paper proposes an Event-Driven
Architecture data relaying method running at the application layer. The method organizes devices of the same
type through events, performs corresponding data relay operations, and distinguishes different types of data.
The data relay task contains two types of subtasks: the data receive task and the data send task. For the data
receiving task, it is regarded as a kind of event response; for the data sending task, it is regarded as a kind of
class method, which is invoked through the class name. The method in this paper conducts comparative
experiments and analyses the experimental data with the length of data relay as a variable. The results show
that the method in this paper only increases the average transit time by 7.23ms when the length of transit data
grows to 8.6 times of the original one, which can realize the data transit task and has a certain adaptability to
the growth of data length.
1 INTRODUCTION
With the rapid growth of the civil aviation industry,
there is an increasing demand for improved efficiency
in ramp inspections (Rosa-Bilbao, 2023). A crucial
area of research and development is the utilization of
mobile robot inspection formations to optimize the
efficiency of these inspections. Currently, the data
transmission for apron inspection equipment relies
heavily on third-party software, resulting in a
bottleneck in the data interaction process (Lombardi,
2019). Therefore, it is imperative to design and
implement a method that allows for seamless data
interaction for inspection equipment (Li, 2021).
Event-driven based design thinking is widely
used. By utilizing Event-Driven architecture, this
paper proposes a data relay method that operates at
the application layer (Wang, 2021). This method
organizes different robots through Event-Driven
Architecture, allowing for efficient communication
and coordination. When receiving data relay tasks,
the method handles them by responding to the
corresponding events (Pogiatzis, 2020). On the other
hand, when initiating data transfer tasks, the method
is invoked through a class method (Rahmani, 2021).
Event-based forwarding method is more suitable for
real-time data processing (Fertier, 2020). At the same
time, the privacy-preserving end-to-end data
forwarding has also aroused research work (Zhang,
2019). Related work on event-based transit methods
in industrial robots has also been carried out
(Semeniuta, 2019).
This paper also addresses the roles of the server-
side and client-side in this system. The proposed
method is implemented and validated, demonstrating
its effectiveness in improving efficiency and
streamlining data interaction in ramp inspections.
2 DIVISION OF DATA RELAY
TASKS
Ramp inspection equipment in the process of
performing the task will produce a variety of types of
inspection task data, such as inspection log files, etc.,
the above data need to be shared by the inspection
equipment, and through the server which will be
transferred to another inspection equipment. The
above process consists of two basic operation units:
data receiving operation and data sending operation
as shown in the Figure 1.
Shi, Y. and Zhang, Y.
Analysis of an Event-Driven Data Relay Based Approach in Ramp Patrols.
DOI: 10.5220/0012880100004536
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Data Mining, E-Learning, and Information Systems (DMEIS 2024), pages 69-74
ISBN: 978-989-758-715-3
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
69
Send
Receive
Robot A
Receive Send
Send Receive
Server
Robot B
Send
Receive
Figure 1: Data relay role interaction diagram.
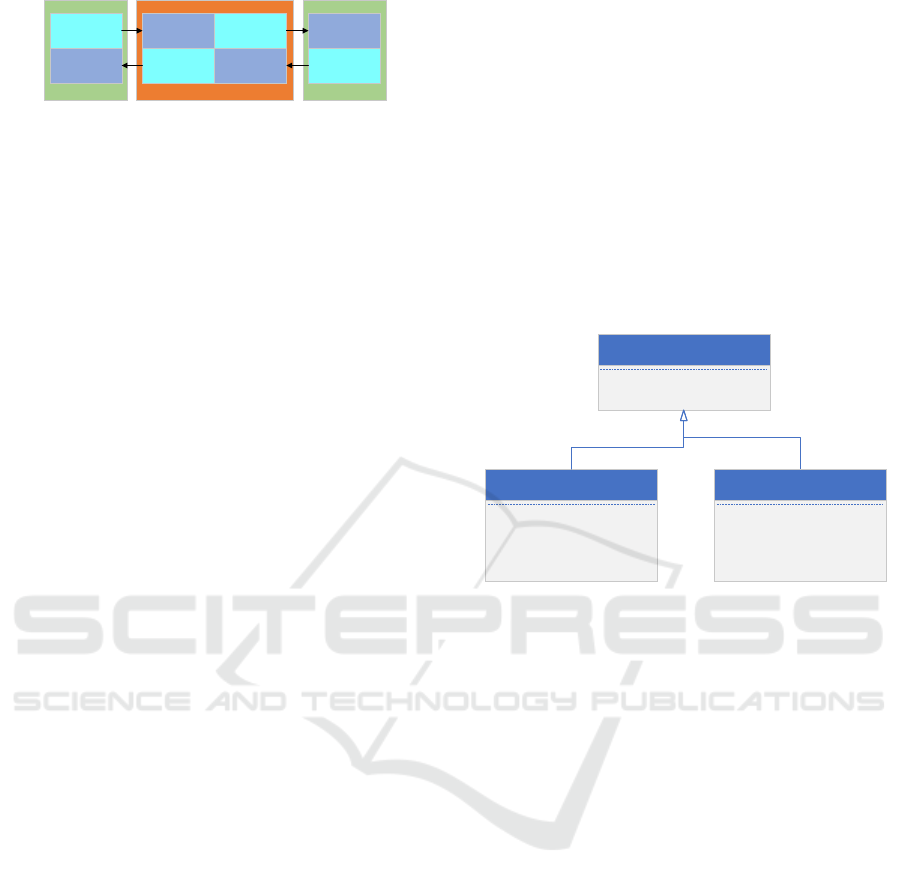
The data relay method proposed in this paper
involves the interaction of three actors: Robot A,
Robot B, and the server. The process begins with
Robot A and Robot B generating data, which is then
relayed by the server. Each actor is equipped with
communication modules that facilitate data
transmission and reception.
To initiate the data relay process, Robot A's
sending module interacts with the server's receiving
module. This allows the data generated by Robot A to
be relayed to the server. Once the server receives the
data through its receiving module, it proceeds to
forward it to Robot B using its own sending module.
Finally, Robot B obtains the data by utilizing its data
receiving module.
It is important to note that the roles of Robot A
and Robot B can also be reversed in this data relay
process. This means that Robot B can become the
sender, sending data to the server, which then relays
it to Robot A. This interchange of roles enables a
dynamic and flexible data transmission between the
two robots and the server.
By employing this data relay method, efficient
and reliable data transmission is achieved among the
three actors involved in the system. This enables
seamless communication and coordination,
ultimately improving the overall efficiency and
effectiveness of ramp inspections.
3 DESIGN OF DATA RELAY
METHODS
3.1 Server Side Design
The server side plays a crucial role in the data relay
process, as it is responsible for both data reception
and data forwarding. In order to effectively organize
the different types of devices involved, the server side
utilizes separate classes for each device type. This
allows for a structured and organized approach to
managing the data transmission process.
To provide a visual representation of the system's
architecture, a class diagram is drawn. This diagram
depicts the relationships and interactions between the
various classes involved in the data relay process. It
serves as a blueprint for understanding the system's
design and functionality.
The class diagram illustrates the different classes
for each type of device, highlighting the specific
methods and attributes associated with them. It
provides a clear overview of how the server side
organizes and manages the data transmission between
the devices. Utilizing this class diagram as a design
reference, the server side can effectively handle the
tasks of data reception and forwarding. This
structured approach enhances the overall efficiency
and reliability of the data relay process on the server
side.
Namespace
Robot_Type_A Robot_Type_B
+on_disconnect(self)
+on_connect(self)
+on_disconnect(self)
+on_connect(self)
+send_data(cls:Robot_A, data:Object)
+on_connect(self)
+on_disconnect(self)
+send_data(cls:Robot_B, data:Object)
+on_event(self) +on_event(self)
Figure 2: Server-side function class design.
The JSON message at the top of the data relay
process serves as a comprehensive and specific
source of information about the data that needs to be
relayed for the ramp patrol scenario. It includes a
detailed description of the data elements and their
corresponding values that are essential for the
effective implementation of the data relay process.
The data format of the server-side interaction with
the client is encapsulated by json in the following
Table 1.
By encapsulating the relevant data in this JSON
message, it provides a standardized and structured
format for the transmission of information. This
ensures that all the necessary details required for the
ramp patrol scenario are included and can be easily
interpreted by the receiving entities.
The JSON message contains key information such
as the location of the ramp, the time of the patrol, the
status of the inspected objects, and any anomalies or
issues detected during the inspection. Additionally, it
may include details about the robots involved, their
specific roles, and any specific instructions or tasks
assigned to them.
In conclusion, the JSON message at the top of the
data relay process serves as a complete and detailed
repository of information for the ramp patrol scenario.
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
70

Its inclusive nature facilitates smooth and efficient
data transmission, enabling seamless coordination
and effective execution of the inspection tasks.
The event-driven model allows the server to
handle a large volume of inspection events in a non-
blocking manner, without having to create and
manage a thread or process for each event. This
approach can improve server throughput, reduce
resource consumption, and better accommodate peak
traffic.
Table 1: This caption has one line so it is centered.
Key Byte Size of Value
Time Stamp 24
Move Comman
d
45
Control Comman
d
45
Device Data 60
Reserved Data 10
3.1.1 Data Reception Operations
Listening for Events. The server maintains one or
multiple event listeners, which are dedicated to
detecting when new events occur. In the context of
apron inspection data, these events typically represent
notifications of new inspection data. Event listeners
are usually bound to one or more event queues, which
are managed by a messaging middleware to handle
the data flow.
Receiving Events. Once a new inspection event is
generated by robot and sent over the network to the
server, it enters the pre-established event queue. The
server's event listener pulls the event from the queue,
ready for processing. This process is asynchronous to
ensure the server can handle a high volume of
concurrent event streams.
Processing Events. The event handler on the
application server is responsible for processing each
event.
Generating a Response. Once an event is
processed, the server might need to generate a
response to inform the inspector that the data has been
received and processed. The response can be sent
back to the inspector through the same event-driven
mechanism or through other response systems (like
real-time messaging systems or email notifications)
to communicate the outcome.
3.1.2 Data Sending Operations
Triggering Notifications: Should the monitored data
exceed predefined thresholds or reveal anomalies, the
server will generate alarm or notification messages.
Updating Status: The server will transmit data to
the apron monitoring panel or related systems to
update the status of aircraft and equipment or the
results of monitoring. This enables real-time
monitoring, allowing ground staff to be immediately
informed of the latest conditions on the apron.
Scheduling Subsequent Processes: Based on
inspection results, the server may need to
automatically schedule maintenance crews for repairs
or assign follow-up routine inspections. Relevant
scheduling information will be sent to scheduling
systems or posted to workforce management systems.
Data Synchronization: The server may send
processed data to other systems for data
synchronization, such as transmitting safety
inspection results to the safety management system.
Data Backup: Periodically or after a critical event,
the server will also transfer data to backup systems to
ensure data security.
Through this process, the server not only
processes and stores data from the apron inspections
but also feeds back crucial information to relevant
personnel and systems, ensuring the apron operates
safely and efficiently. The application of an event-
driven architecture accelerates server responsiveness,
enabling it to promptly respond to various events,
thus maintaining the operational efficiency of the
entire airport.
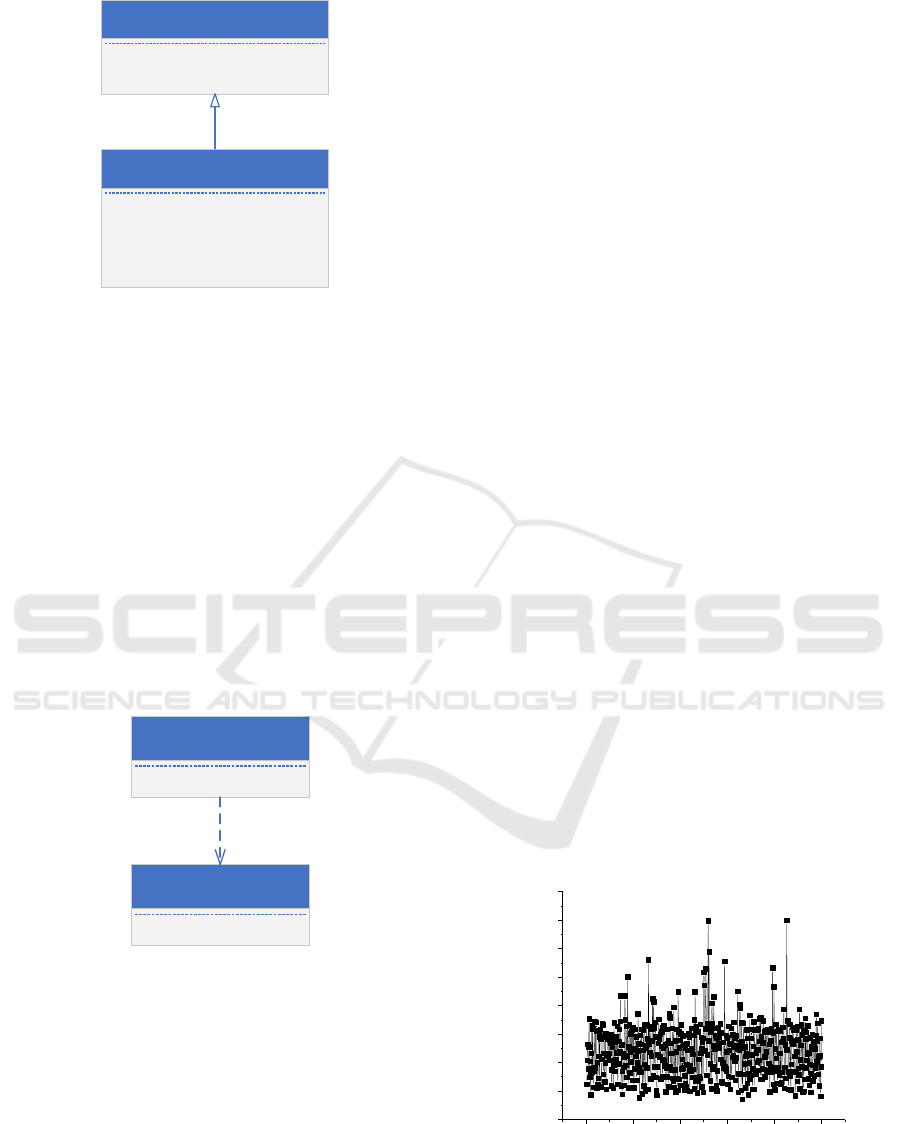
3.2 Robot Side Designs
In the context of ramp inspections, the architectural
framework employed for the development of the
robot and server sides exhibits remarkable similarities,
as depicted in Figure 3. This resemblance, however,
belies a crucial divergence in functionality—the robot
side places a far greater emphasis on the autonomous
dispatch of data that is intended for subsequent
relaying. This pivotal feature necessitates the
implementation of a sophisticated event-driven
mechanism capable of local monitoring.
To address this requirement, the event listening
architecture is meticulously crafted and presented in
Figure 4. It is engineered to facilitate real-time
surveillance of specific activities within the robot's
operational environment. At the heart of this system
is the capability to observe and react to changes
occurring in files, a fundamental necessity for the
robot to fulfil its objective of data transmission.
Analysis of an Event-Driven Data Relay Based Approach in Ramp Patrols
71
ParentEvent
Robot_Type_Local
+on_disconnect(self)
+on_connect(self)
+on_disconnect(self)
+on_connect(self)
+send_data(cls:Robot_A, data:Object)
+on_event(self)
Figure 3: Robot-side function class design.
Upon acquisition, the data collated by the
inspection robot undergoes a process of
transformation, relaying into a persistent file-based
format. Consequently, these files are stored within a
designated directory whose alterations must be
closely observed. To that end, the event listening
system is primed to detect any file modification
events within the target folder.
The occurrence of such an event triggers a
meticulously defined response protocol. This
protocol entails the invocation of a corresponding
class method—one that is adept at handling the data
sending operation. The class, specified by its name, is
effectively engaged through this listener system,
thereby catalysing the data forwarding function.
Robot_Type_Local
FileEventListener
<<call>>
+sendData()
+on_modified()
Figure 4: File event listener calling a robot's data sending
static method.
To elaborate, when the designated file directory
experiences an addition, deletion, or amendment, the
event listening system springs into action. It
instantaneously signals the specified class, which, in
turn, powers up the necessary method to process and
expeditiously dispatch the data to its intended
destination. This automated synergy between file
modifications and data transmission ensures a
seamless and uninterrupted flow of information, a
critical aspect of the inspection robot's utility.
Overall, the design philosophy underlying the
inspection robot's class structure is to deliver a robust
and autonomous system tailored for the dynamic
ramp inspection environment. As a result, the
inspection robot performs its duties with a high
degree of efficiency, accuracy, and reliability—key
qualities necessary for the demanding tasks it is
entrusted with.
4 TEST FOR DATA RELAY
METHOD
Experiments are designed to test the relay
performance of the method using the average
statistical time as an index. The method of counting
the relay time is to record the timestamp at the
sending end when sending, and get the current
timestamp at the receiving end to obtain the relay
time.
4.1 Experiment 1
Repeatedly forward 500 pieces of data with a data
length of 184Bytes and a time interval of 1s, and
calculate the time for each relay. The vertical axis is
the time difference in milliseconds, and the horizontal
axis is the number of forwarding times. The
experimental results are shown below.
From the above graphs, we can get that with the
data length of 184Bytes in Exp.1, most of the relay
time of this paper's method is between 20-70ms, and
in a few cases, the relay time goes beyond this range,
with a minimum value of 14.169ms or a maximum
value of 139.932ms. In Exp.1, the geometric mean of
the relay time is 43.98ms, the geometric standard
deviation is 19.09 and the median is 47.49ms.
Figure 5: Raw data on relay time of Exp.1.
0 100 200 300 400 500
0
20
40
60
80
100
120
140
160
time cost (ms)
relay times
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
72
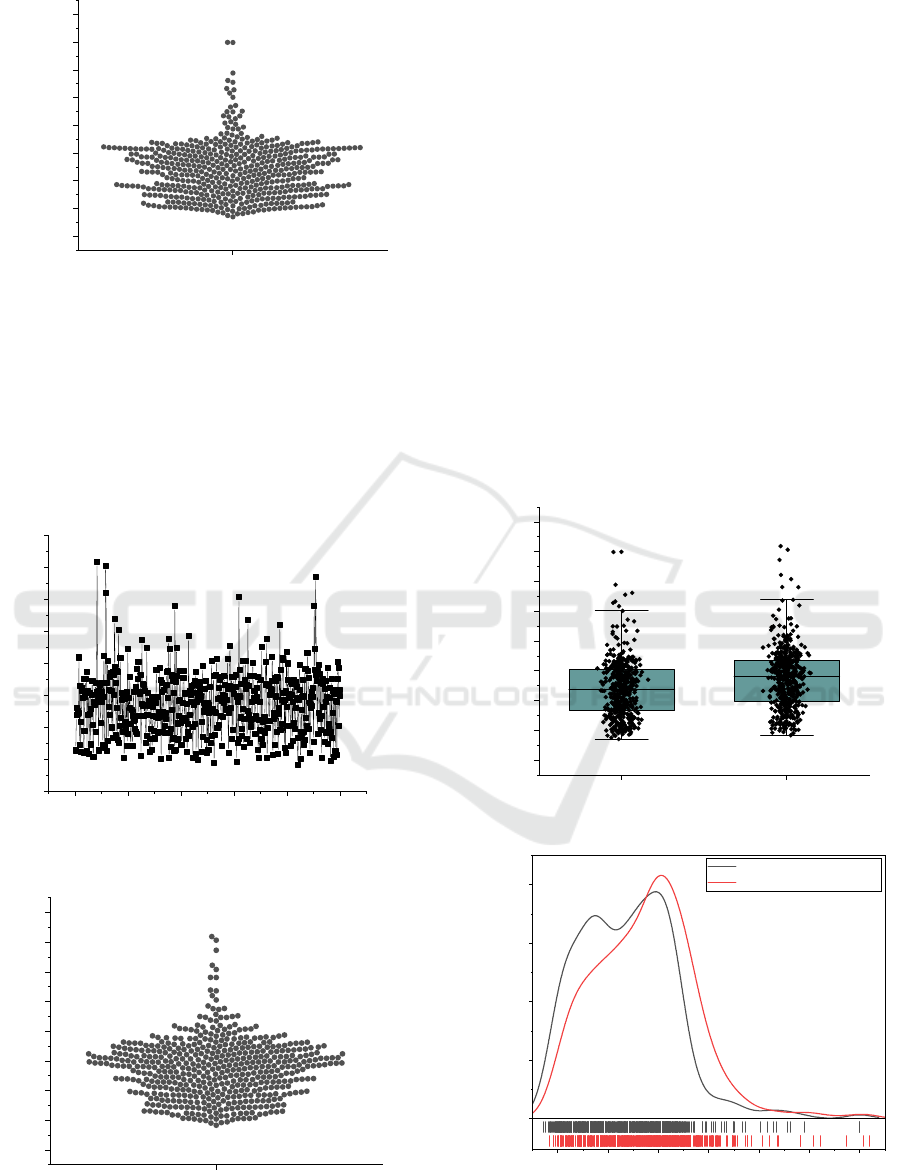
Figure 6: Beeswarm plot of Exp.1.
4.2 Experiment 2
Repeatedly forward 500 pieces of data with a data
length of 1584Bytes and a time interval of 1s to
calculate the time of each relay. The vertical axis is
the time difference in milliseconds, and the horizontal
axis is the number of forwarding times. The
experimental results are shown below.
Figure 6: Raw data on relay time of Exp.2.
Figure 7: Beeswarm plot of Exp.2.
From the above graphs, we can get that with the
data length of 1584Bytes in Exp.2, most of the relay
time of this paper's method is between 20-80ms, and
in a few cases, the relay time goes beyond this range,
with a minimum value of 16.682ms or a maximum
value of 143.802ms.In Exp.2, the geometric mean of
the relay time is 51.21ms, geometric standard
deviation is 1.47, and the median is 56.23ms
5 CONCLUSION
In this paper, to provide a comprehensive comparison
of the outcomes from two distinct experiments, we
employ graphical representations in the form of box-
scatter plots and distribution-axis-whisker plots. The
usage of these plots allows for an effective visual
comparison and analysis of the data distributions,
statistical variations, and potential outliers. The
effects of the two experiments are shown in Fig.9 and
Fig. 10.
Figure 8: Box-and-Scatter Chart of Exp.1 and Exp2.
Figure 9: Distribution map - Axis whiskers plot of Exp.2.
Data Length: n = 184 Bytes
0
20
40
60
80
100
120
140
160
Range
0 100 200 300 400 500
0
20
40
60
80
100
120
140
160
time cost (ms)
relay times
Data Length: n = 1584 Bytes
0
20
40
60
80
100
120
140
160
Range
Data Length: n = 184 Bytes Data Length: n = 1584 Bytes
0
20
40
60
80
100
120
140
160
Range
20 40 60 80 100 120 140
0.000
0.005
0.010
0.015
0.020
Density
time cost (ms)
Data Length: n = 184 Bytes
Data Length: n = 1584 Bytes
Analysis of an Event-Driven Data Relay Based Approach in Ramp Patrols
73

From the above graphs, it can be obtained that
with the increase of data length of each relay, the
position of the box in the box plot is shifted upward,
i.e., there is a smaller increase in the relay time of
each relay accordingly. And from Fig. 10, it can be
obtained that with the increase of data relay length,
the density of data distribution decreases in the range
of 20ms-30ms and increases near 70ms-80ms.
Overall, the method proposed in this paper is able
to realize the data relay function in the ramp
inspection scenario, and the data relay time is kept in
a suitable range. The results show that the method in
this paper only increases the average transit time by
7.23ms when the length of transit data grows to 8.6
times of the original one, which can realize the data
transit task and has a certain adaptability to the
growth of data length. The increase in data length has
an effect on the data relay time, but it does not cause
dramatic fluctuations in data relay time.
REFERENCES
Tian, Y., Meng, Y., Zhao, X., Wen, X., Meng, L., Qin, X.,
2023. Age-aware relay strategy with simultaneous
wireless information and power transfer in remote
monitoring systems. IET Communications 17, 1418–
1431.
Rosa-Bilbao, J., Boubeta-Puig, J., Rutle, A., 2023.
CEPEDALoCo: An event-driven architecture for
integrating complex event processing and blockchain
through low-code. Internet of Things 22, 100802.
Lombardi, F., Muti, A., Aniello, L., Baldoni, R., Bonomi,
S., Querzoni, L., 2019. PASCAL: An architecture for
proactive auto-scaling of distributed services. Future
Generation Computer Systems 98, 342–361.
Li, W., Li, H., Wang, S., 2021. An event-driven multi-agent
based distributed optimal control strategy for HVAC
systems in IoT-enabled smart buildings. Automation in
Construction 132, 103919.
Wang, Yahui, Zheng, L., Wang, Yiwei, 2021. Event-driven
tool condition monitoring methodology considering
tool life prediction based on industrial internet. Journal
of Manufacturing Systems 58, 205–222.
Pogiatzis, A., Samakovitis, G., 2020. An Event-Driven
Serverless ETL Pipeline on AWS. Applied Sciences 11,
191.
Rahmani, A.M., Babaei, Z., Souri, A., 2021. Event-driven
IoT architecture for data analysis of reliable healthcare
application using complex event processing. Cluster
Computing 24, 1347–1360.
Fertier, A., Montarnal, A., Barthe-Delanoë, A.-M., Truptil,
S., Bénaben, F., 2020. Real-time data exploitation
supported by model- and event-driven architecture to
enhance situation awareness, application to crisis
management. Enterprise Information Systems 14, 769–
796.
Zhang, W., 2019. A data fusion privacy protection strategy
with low energy consumption based on time slot
allocation and relay in WBAN. Peer-to-Peer
Networking and Applications 12, 1575–1584.
Semeniuta, O., Falkman, P., 2019. Event-driven industrial
robot control architecture for the Adept V+ platform.
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
74
