
Improved DETR-Based Detection of Icing and Snow on Aircraft
Surfaces
Shi Yongsheng and Xiang Yuhang
College of Aeronautical Engineering, Civil Aviation University of China, Tianjin 300300, China
Keywords: DETR, Object Detection, RefineBox, De-Icing detection, Transformer.
Abstract: Utilizing neural network models to detect icing and snow accumulation on aircraft surfaces can significantly
reduce the workload of maintenance personnel, enhance operational efficiency, and lower aircraft operating
costs. This proposal marks the first application of the transformer-based object detection model DETR to the
detection of icing and snow on aircraft surfaces. To address the issue of significant boundary box prediction
deviations in DETR, the RefineBox localization optimization network was employed for improvements.
Performance was compared and analyzed on a custom dataset, revealing a 1.8% increase in the mAP metric
for the enhanced model. Ground trials were conducted to validate the accuracy and feasibility of the improved
model in detecting aircraft surface icing and snow. The results demonstrate that the enhanced model performs
well, exhibits strong environmental adaptability, and can operate stably on mainstream devices.
1 INTRODUCTION
Snow, frost, and ice accumulation on the surfaces of
aircraft can compromise the clean aerodynamic state
critical for flight, posing a threat to flight safety. Not
only in snowy weather, but whenever meteorological
conditions reach icing thresholds, aircraft must
undergo rigorous de-icing procedures before takeoff.
Therefore, checking for surface icing during the pre-
flight walk-around is essential.
Currently, aircraft surface icing checks are
primarily conducted through manual inspections and
contact-type icing sensors. Manual inspections
depend on the visual acuity and judgment of
maintenance personnel, making this method
subjective. It's impractical to comprehensively
inspect an entire aircraft's exterior solely by human
height, requiring tools and presenting significant
limitations; moreover, inspecting an aircraft,
especially large ones, is time-consuming, involves
multiple personnel, is costly, inefficient, and prone to
issues during handover. Contact-type icing sensors
can only detect icing at a single point or small area.
For detecting widespread surface icing, these
methods often require the installation of numerous
sensors (Zhou et al, 2021).
In contrast, computer vision-based detection
methods are unrestricted, relying on camera-captured
images to perform inspections without directly
contacting the aircraft surface and capable of wide-
area detection. This approach offers good protection
for the aircraft, allowing for quantitative
representation of detection results. Before 2014,
traditional algorithms dominated computer vision-
based object detection. Subsequently, deep learning-
based object detection algorithms rapidly evolved.
Convolutional Neural Networks (CNNs) utilize fixed
weights in convolutional layers to extract features
from specific parts of an image, then apply these
invariant weights across the entire image through
convolution. This approach has two main benefits:
First, the invariance of weights ensures that the same
features are extracted from any sub-image within the
same image; second, it significantly reduces the
amount of input data for the image. These advantages
are crucial for the training speed and robustness of the
neural network and have been proven to far surpass
traditional feature-based image recognition methods
in accuracy (Wei, 2022).
In 2020, Glenn Jocher (Carion et al, 2020)
released the YOLOv5 model, and the Facebook AI
Research team proposed the DETR neural network
model. Li Gang (Li et al, 2023) from North China
Electric Power University and others integrated
DETR with prior knowledge to address the issue of
sample imbalance in bolt defect detection. In 2023,
Zhou Jing and Li Xin (Zhou and Li, 2023) used the e-
58
Yongsheng, S. and Yuhang, X.
Improved DETR-Based Detection of Icing and Snow on Aircraft Surfaces.
DOI: 10.5220/0012877900004536
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Data Mining, E-Learning, and Information Systems (DMEIS 2024), pages 58-63
ISBN: 978-989-758-715-3
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

fficientNet network to extract image features, which
were then merged via the BiFPN network and
analyzed using DETR, enhancing the detection
efficiency in tasks involving the inspection of anti-
vibration hammers on power transmission lines.
Representative models such as DETR and YOLOv5
have proven their effectiveness in a broad range of
object detection tasks.
DETR’s self-attention mechanism endows it with
strong global contextual awareness, beneficial for
fully considering the relationships between ice/snow
targets and the aircraft, and operates without the need
for preset anchor boxes, thus flexibly adapting to ice
formations of varying sizes and shapes. Given these
advantages, applying the DETR model to the task of
detecting ice on aircraft surfaces holds great potential.
However, during its application in detecting ice and
snow accumulation on aircraft surfaces, issues such
as positioning deviations, especially for small targets
like icicles and clear ice, were noted, indicating that
the model’s localization performance needs
enhancement. In 2023, Chen Y (Chen, 2023). from
the Institute of Artificial Intelligence, Chinese
Academy of Sciences and the University of Chinese
Academy of Sciences proposed a localization
optimization network tailored to the DETR model and
its derivatives. This network extracts multi-scale
features from DETR’s Resnet backbone using a
Feature Pyramid Network (FPN) and uses these
features alongside Ground Truth to correct predicted
bounding boxes, thereby improving the localization
accuracy of the DETR model. This development is
significant for addressing the aforementioned
application issues. Employing advanced deep
learning techniques for detecting ice on aircraft
surfaces to enhance flight safety and efficiency
provides maintenance personnel with a precise,
efficient, and automated icing detection method,
offering reliable decision support and further
elevating flight safety standards.
2 IMPROVED DETR MODEL
BASED ON REFINEBOX
2.1 DETR Model
DETR (Detection Transformer) is an object detection
network based on the Transformer architecture.
Unlike traditional object detection methods, DETR
adopts an end-to-end approach, outputting the classes
and positions of objects directly through the
Transformer network, thus accomplishing the task of
object detection.
DETR provides a novel approach to end-to-end
object detection algorithms by combining CNNs and
the Transformer model to predict the class
information of N objects, including both targets and
background, in parallel. Leveraging the
Transformer's focus on global features, the DETR
model possesses powerful global feature learning
capabilities (Zhang et al, 2022). Specifically, DETR
first encodes the input image into feature vectors via
a CNN, which are then combined with positional
encodings. The computation of positional encodings
is as follows (Chen et al, 2023):
2/
(,2)
2/
(,21)
sin( /10000 )
cos( /10000 )
id
pos i
id
pos i
PE pos
PE pos
+
=
=
(1)
In the formula, "pos" represents the position of the
image block; "d" represents the dimension of the
vector; and "2i" and "2i+1" represent the even and
odd dimensions within "d", respectively. After the
positional encoding, the feature vector is processed
by the encoder which modifies the feature map.
Through a linear layer and a multi-head self-attention
mechanism, DETR generates a set of encoded vectors
of specific sizes, representing the objects present in
the image. These encoded vectors are matched with
known category vectors, thus determining the
probability distribution of classes for each object.
The Encoder in DETR receives feature vectors
and processes them through a series of self-attention
layers and feedforward neural networks, encoding
them to extract high-level feature representations.
These representations are then passed to the Decoder,
serving as inputs for subsequent processes. The
Decoder receives these feature representations from
the Encoder and generates the object detection results.
Typically, the Decoder is composed of a series of
self-attention layers and feedforward neural networks,
which allow it to merge and process features at
different levels. In each Decoder layer, the model
generates new predictions based on the current
feature representations and previous prediction
outcomes. These predictions include information
about the object's class and location.
The interaction between the Encoder and Decoder
is facilitated by a cross-layer multi-head self-attention
mechanism. This mechanism allows the model to
exchange information across different levels, thereby
better capturing the global context and the
relationships between objects (Fan and Ma, 2023;
Vaswani, 2017; Chen et al, 2018). The design of the
Encoder and Decoder in DETR aims to utilize the
Transformer's self-attention mechanism and
feedforward neural networks to accomplish end-to-
end object detection tasks. This architecture not only
Improved DETR-Based Detection of Icing and Snow on Aircraft Surfaces
59
improves the efficiency of object detection by
reducing the reliance on traditional detection steps
such as region proposal generation but also enhances
the model's ability to understand and interpret
complex scenes where multiple objects interact or
overlap.
Decoder
M*
Add&Norm
Add&Norm
FFN
Multi-Head Self-Attention
Image features
V
K
Q
Spatial positional
encoding
N*
Encoder
Add&Norm
Multi-Head Self-Attention
Multi-Head Self-Attention
Add&Norm
FFN
Object queries
VK
Q
Add&Norm
VK
Q
FFN FFN
Bounding
Box
Class
Figure 1: The structure of the transformer in DETR.
In order to improve the performance of the DETR
model during training, it is necessary to use a loss
function to measure the difference between the
predictions and the actual targets. DETR employs a
method called the Hungarian algorithm to match
predicted bounding boxes with their corresponding
ground truth values, then calculates the cross-entropy
loss for the classes and the Smooth L1 loss for the
bounding boxes to achieve the minimal loss. The
formula for the cross-entropy loss is (Huang et al,
2019):
11
1
log( )
NC
class ij
ij
ij
Lyy
N
∧
==
=−
(2)
N
is the number of actual targets in the image,
C
represents the number of categories (including the
background), 𝑦
is the predicted value for the j-th
category in the i-th prediction box, and 𝑦
∧
is the
actual value for the j-th category in the i-th prediction
box.
Smooth L1loss function:
4
11
1
1( )
N
iij
box ij
ij
L m SmoothL b b
N
∧∧
==
=−
(3)
i
b
represents the coordinates of the i-th predicted
box,
i
b
∧
represents the coordinates of the i-th actual
box, and
i
m
∧
represents the existence indicator of the
i-th actual box (1 for present, 0 for absent).
Decoder
Object queries
Positional encoding
Transformer Encoder
Encoder
Backbone
Set of im age feat ures
CN
N
…
Transformer Encoder
…
FNN
FNN
FNN
FNN
Class,
Box
Class,
Box
no
object
no
object
Prediction heads
Figure 2: The structure of DETR.
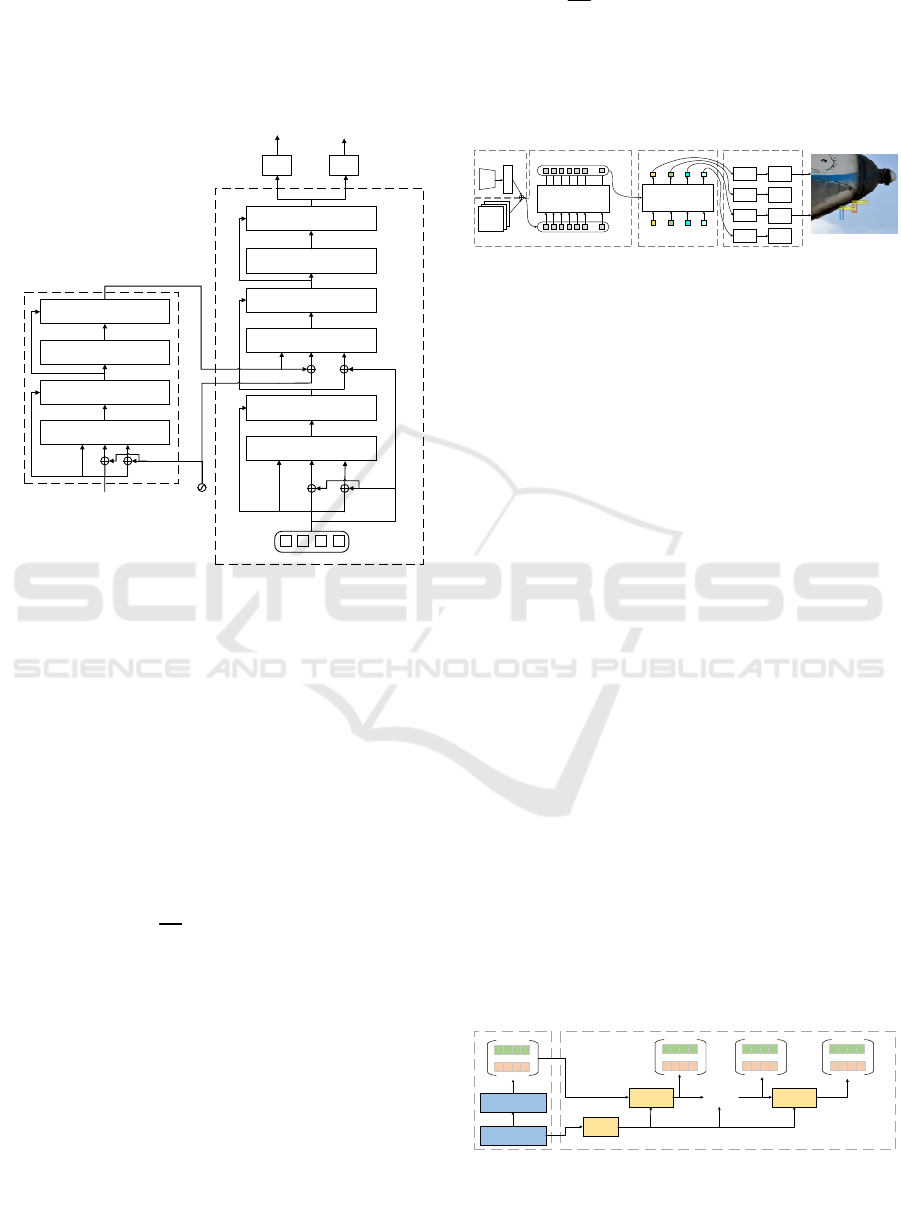
2.2 RefineBox Location Optimization
Network
RefineBox Localization Optimization Network is a
method used for localization enhancement in object
detection. It effectively improves the accuracy of
object localization in the DETR model by optimizing
bounding boxes without affecting the classification
results. By utilizing multi-scale features and a series
of Refiner modules, this network efficiently refines
the bounding boxes predicted by the detector, further
enhancing model performance. This approach adopts
a two-stage detection philosophy. However, unlike
typical two-stage methods, the RefineBox
Localization Optimization Network is built upon a
well-trained detection model with frozen parameters.
It can be directly applied to pre-trained models
without the need for retraining, significantly reducing
time and computational costs.
First, the Feature Pyramid Network (FPN) is used
to extract multi-scale features from the DETR's
Backbone, reducing the channel count to a specific
number C, considered as the model dimension. These
features, along with the bounding boxes predicted by
the Detector, serve as inputs. This enables the
RefineBox to perform effectively in detecting both large
and small objects. Subsequently, through a series of
Refiner modules, the extracted multi-scale features
are fully utilized to improve the bounding boxes
predicted by the Detector, as shown in Figure 3. The
weights of the Refiner modules are shared.
Transformer(froze
n)
Backbone(frozen)
x y w h
x y w h
… … …
Frozen pre-trained
detector
FPN
Refiner
x y w h
x y w h
… … …
x y w h
x y w h
… … …
x y w h
x y w h
… … …
Refiner
……
……
Pre-training detector
Output boxes
RefineBox Positioning Optimization
Network
Figure 3: Structure of the RefineBox Localization
Optimization Network.
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
60

The Refiner component consists of an ROI Align
layer, a residual block, and a Multi-Layer Perceptron
(MLP). Its internal structure is shown in Figure 4. The
FPN extracts multi-scale features from the Backbone
and inputs them into the ROI Align for feature
alignment across different scales. Subsequently, the
bounding boxes are optimized through the residual
block and the MLP.
Boxes
ROI Align
Residual
Module
MLP
Boxes
FPN
Figure 4: Structure of the Refiner.
3 EXPERIMENTS AND
ANALYSIS
3.1 Dataset and Experimental Setup
In order to compare the performance of the models
before and after the improvement, a custom dataset of
icing or snow on the surface of an airplane was used
to train and test the models before and after the
improvement. A high-quality dataset is required to
contain a large variety and sufficient number of
images covering a rich range of application scenarios,
such as variations in different angles, lighting
conditions, and so on. 493 image data of icing snow
on the surface of the airplane were obtained by
collecting online and taking field photos on the ramp,
and data augmentation methods such as flipping and
adding noise were used to balance the categories and
reduce overfitting. The total amount of data after
augmentation was 800. LabelMe was chosen as the
annotation software, the decision to use LabelMe was
driven by the need for a reliable tool that can handle
complex annotations with ease, facilitating the
preparation of high-quality training data., and a
COCO-format dataset was created for training the
model and testing the model's performance metrics.
Neural network training environment and
configuration:
Table 1: Environment and configuration.
Learning Rate 1e-4
Encoder+Decoder 6+6
Epochs 250
Device NVIDIA Quadro P6000
Operating System Windows10
Framework Pytorch2.0.0+cuda11.8
Programming Language Python
3.2 Experimental Results and
Analysis
In the field of object detection, evaluating the
performance of models is crucial, directly impacting
the effectiveness and feasibility of models in practical
applications. This experiment aims to conduct a
detailed data analysis and comparison to
comprehensively assess the performance of several
mainstream object detection models and the
RefineBox DETR model on a dataset of aircraft
surfaces covered with ice and snow. A horizontal
comparison not only showcases the unique
advantages and potential limitations of each model
but also highlights the effectiveness of the
improvement methods and the advantages of the
improved model.
The design of this experiment strictly adheres to
scientific evaluation standards and principles of fair
comparison. Tests are conducted under identical
experimental conditions, including the same dataset,
hardware, and software configurations, to ensure the
objectivity of the results. This approach not only
helps to verify the improvements made to the
RefineBox DETR model but also provides valuable
data support and theoretical guidance for future
technological innovations in this field.
Table 2: Results.
Method
F1-
Score
Recall mAP(%) Precision
Faster-
RCNN
0.872 0.861 82.5 0.815
YOLOv5 0.859 0.778 79.6 0.863
DETR 0.863 0.932 81.9 0.802
ours 0.880 0.953 83.7 0.837
Improved DETR-Based Detection of Icing and Snow on Aircraft Surfaces
61

From the experimental data in Tables 2, it is
evident that under the same environmental
configurations and using the same training dataset,
the two-stage object detection algorithm Faster-
RCNN shows moderate recall and precision, with
higher F1-Score and mAP, indicating its good
performance and balanced recall and precision.
However, due to the more complex structure of the
two-stage detection algorithm compared to single-
stage algorithms, it requires more computation time.
The YOLOv5 object detection model has the lowest
recall and highest precision, indicating that this model
is less likely to produce false positives in the context
of detecting icing and snow accumulation on aircraft
surfaces, but it has a higher rate of false negatives,
suggesting that it is prone to under-detecting the
actual number of targets, leading to missed detections.
The performance of the DETR model is more
balanced compared to YOLOv5. Contrary to
YOLOv5, it has higher recall but lower precision,
indicating that it is less likely to miss detections, but
more prone to false positives, and its higher mAP
score also demonstrates its superior overall
performance.
The improved RefineBox DETR model achieves
the best results in all three metrics, proving the
stability and effectiveness of its enhancements. The
high recall ensures the reliability of the detection
results, and the highest mAP score demonstrates its
superior overall performance.
3.3 Application Testing
To validate the practicality of the model, it was
chosen to conduct field tests on the apron after
snowfall. The test environment included two lighting
conditions: morning and evening. Factors such as the
shooting angle, location of ice and snow on the
aircraft, and the conditions of ice and snow
accumulation were considered. The test subjects were
two types of aircraft: a silver-grey skinned J-5 and a
milky-white skinned An-24. The purpose of
introducing these variables was to fully verify the
impact of environmental factors on the accuracy of
detection results.
The results presented in Table 3 show the
detection performance of RefineBox DETR in real-
world applications. The first group of photos and the
second group were taken under conditions of shadow
and direct sunlight, respectively; from angles of top-
down and bottom-up views; with different skin
colours; ice and snow located on the upper surface of
the wing and the leading edge of the wing; under
conditions of snow + transparent ice and snow +
icicles. These varying conditions were used to test the
performance of the RefineBox DETR Detector in
different real-world scenarios.
The test results indicate that RefineBox DETR
achieves good detection results in various real-world
scenarios under different conditions, reaching a high
level of accuracy. This demonstrates the model's
robustness and effectiveness in practical applications,
particularly in challenging environmental conditions
encountered in aircraft operations on snow-covered
aprons.
Table 3: Application test results.
Capture images Results
The results in Table 3 demonstrate the detection
effectiveness of the RefineBox DETR in practical
applications. From the results, it is evident that the
improved RefineBox DETR object detection model
exhibits strong performance in the application
scenario of detecting ice and snow on aircraft surfaces,
achieving high accuracy and recall rates. This
indicates that the model is capable of reliably
identifying areas of icing and snow accumulation,
essential for maintaining aircraft safety and
operational efficiency.
4 CONCLUSIONS
This article aims to enhance the accuracy of the
DETR model in the application scenario of detecting
ice and snow on aircraft surfaces by integrating the
localization optimization network RefineBox with
DETR. This integration improves the model's
prediction of bounding boxes, reduces loss values,
and increases the accuracy of the results.
A custom dataset of images showing ice and snow
on aircraft surfaces was created to train and test the
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
62

metrics of RefineBox DETR. After selecting suitable
hyperparameters for training, the final results
demonstrated that RefineBox DETR exhibits higher
robustness and accuracy compared to the original
DETR model, proving the effectiveness of the
improvements.
To verify the real-world performance of
RefineBox DETR, it was tested in an engineering
application on the apron. The testing process involved
different lighting conditions, shooting angles, aircraft
skin colours, positions of ice and snow, and ice and
snow conditions, to highlight RefineBox DETR's
inclusivity to different environments during practical
applications. Field test results indicate that RefineBox
DETR has good environmental inclusivity, high
detection accuracy, and minimal errors, accurately
detecting snow, transparent ice, and icicles.
REFERENCES
Zhou, S., Zhao, M., Hu, X., Yu, Q., Xu, C., 2021. Research
on Quantitative Detection Method of Icing Based on
PCA of Guided Wave Energy Features. Measurement
& Control Technology.
Wei, P., 2022. Research on Wing Ice Shape Recognition
Technology Based on Improved U-Net. Civil Aviation
Flight University of China.
Carion, N., Massa, F., Synnaeve, G., Usunier, N., Kirillov,
A., & Zagoruyko, S., 2020. End-to-end object detection
with transformers. In European conference on
computer vision. Cham: Springer International
Publishing.
Li, Gang., Zhang, Y., Wang W., et al., 2023. Transmission
Line Bolt Defect Detection Method Using DETR and
Prior Knowledge Integration. Journal of Graphics.
Zhou, J., Li, X., 2023. Transmission Line Anti-vibration
Hammer Detection Based on Improved DETR.
Computer Simulation.
Chen, Y., Chen, Q., Sun, et al., 2023. Enhancing Your
Trained DETRs with Box Refinement. arXiv preprint
arXiv.
Zhang, N., Zhong, Y., Zhao, Tao., Dian S., 2022. Small-
Size Defect Detection Algorithm for Product Surfaces
Based on Smooth-DETR. Computer Applications
Research.
Chen, L., Lin, C., Zheng, Z., Mo, Z., Huang, X., Zhao, G.,
2023. Review of Transformer in Computer Vision
Scenes. Computer Science.
Fan, R., Ma, X., 2023 Improved DETR Algorithm for
Crowded Pedestrian Detection. Computer Engineering
and Applications.
Vaswani, A., Shazeer, N., Parmar N., et al., 2017. Attention
is all you need. In Proc of the 31st International
Conference on Neural Information Processing Systems.
Red Hook, NY: Curran Associates Inc.
Chen, L., Zhu, Y., Papandreou, G., et al., 2018. Encoder-
decoder with atrous separable convolution for semantic
image segmentation. In Proc of the 15th European
Conference on Computer Vision. Cham: Springer.
Huang, Q., Song, K.., Lu, J., 2019. Loss Balance Function
Applied to Imbalanced Multiclass Problems. Journal of
Intelligent Systems.
Improved DETR-Based Detection of Icing and Snow on Aircraft Surfaces
63
